Professional Documents
Culture Documents
Elmos RGB Lin Controller With Current Source E52136 Ds
Uploaded by
Евгений ИвановOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Elmos RGB Lin Controller With Current Source E52136 Ds
Uploaded by
Евгений ИвановCopyright:
Available Formats
RGB LIN Controller with Current Source E521.
36
PRODUCTION DATA – May 23, 2017
Features General Description
• Integrated 16 bit microcontroller The E521.36 is a one chip solution for RGB ambient
• 32kByte OTP light application. It provides an integrated 16-bit micro-
• 128Byte customer usable non-volatile memory controller with 32kByte memory, EEPROM, a LIN trans-
• 1.25kByte RAM ceiver supporting LIN auto-addressing. The integrated
• 16kByte SysROM containing standard LIN routines current sources can be controlled by a 16bit PWM with a
and boot loader 48MHz clock. This enables PWM cycle frequencies up
• 4 PWM generators with 48MHz and 16bit resolution to 700Hz with full resolution. Each driver can be used to
• 2 Timer with 16bit resolution drive external loads with currents up to 40mA.
• ADC 12Bit / fS = 400kSa/s For power management and temperature compensation
• JTAG debug interface usable as GPIO and/or analog the device provides an integrated temperature sensor as
input well as an supply voltage sensing circuitry. Furthermore,
• Hardware divider / multiplier with the ADC in the measurement system and the differ-
• LIN-Bus transceiver (V2.2a) with integrated slave ential measurement of the forward voltage an effective
node position detection (SNPD) compensation for ageing and temperature can be imple-
• LIN UART with automatic bit rate detection (accuracy mented.
< 0.15%)
• 3 high-precision current mode LED drivers with cur- Ordering Information
rents up to 40mA and fast slopes
• Full range voltage sense inputs Product ID Temp. Range Package
• Battery supply range 5V to 28V E52136B80D -40°C to +125°C SO8EP
• Full automotive qualification AEC-Q100
• Package SO8EP
Applications
Interior light modules
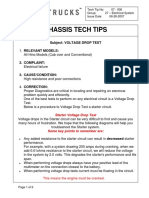
Typical Operating Circuit
Figure 1: Typical application with low side current sources
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
1 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Functional Diagram
Figure 1: Functional Diagram
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
2 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
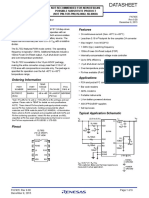
Pin Configuration
Figure 1: Pin Configuration
Pin Description
No Name Type Description
1 GND HV_S Analog ground
LIN ground
LED ground
2 LIN_M HV_A_IO LIN bus line (direction towards master)
3 LIN_S HV_A_IO LIN bus line (direction away from master)
4 VS HV_S Battery supply voltage
5 OUT0 AD_IO LED driver channel 0 & GPIO0
6 OUT1 AD_IO LED driver channel 1 & GPIO1
7 OUT2 AD_IO LED driver channel 2 & GPIO2
8 DB AD_IO Debug interface (GPIO3 and analog input)
EP Exposed Connect to ground
Pad
Note: A = Analog, D = Digital, S = Supply, I = Input, O = Output, B = Bidirectional, HV = High Voltage
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
3 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Typical Operating Characteristics
Figure 1: Typical leakage current IOUTn,LEAK at pins OUTn. Figure 2: Typical current in sleep mode at pin VS
The IC is in normal mode and the pull-up and pull-down
resistors as well as the LED driver are disabled.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
4 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
1 Absolute Maximum Ratings
Stresses beyond these absolute maximum ratings listed below may cause permanent damage to the device.
These are stress ratings only; operation of the device at these or any other conditions beyond those listed
in the operational sections of this document is not implied. Exposure to absolute maximum rated conditions
for extended periods may affect device reliability. All voltages referred to Ground. Currents flowing into terminals
are positive, those drawn out of a terminal are negative.
Table 1-1: Absolute Maximum Ratings
No. Description Condition Symbol Min Max Unit
1 Junction temperature TJ -40 125 °C
2 DC voltage at pin VS continuous VS -0.3 40 V
3 Voltage at pins OUTn n= 0,1,2 VOUT_n -0.3 VS + V
0.3
4 Voltage at pins LINM and LINS continuous VLIN_M/S -27 40 V
5 Current through pins LINM and LINS continuous ILIN_M,LIN_S -200 200 mA
6 Input voltage at pin DB VIO,DB -0.3 5.5 V
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
5 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
2 Recommended Operating Conditions
Table 2-1: Recommended Operating Conditions
No. Description Condition Symbol Min Typ Max Unit
1 Ambient temperature TAMB -40 - 125 °C
2 Ambient temperature for programming the TAMB,prog 0 - 40 °C
OTP
3 Functional range, besides LIN VS,FUNC 5.0 28 V
4 Functional range LIN transceiver VLIN,VS 7 18 V
5 Voltage applied to pin DB VS≥5V VDB -0.3 3.6 V
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
6 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
3 Electrical Characteristics
(5.0V < VVS < 28V, -40°C < TAMB < +125°C, unless otherwise noted. Typical values are at VVS = 12.0V and TAMB =
+25°C. Positive currents flow into the device pins.)
3.1 Power Supply and References; pin VS
Table 3.1-1: Power Supply: Electrical Parameters
No. Description Condition Symbol Min Typ Max Unit
1 Current in sleep mode at temperatures less Sleep mode, IVS,SLEEP_LT 15 20 µA
than 40°C VS=VOUT,n=VLIN=1
3.5V,
TAMB<40°C
2 Current in sleep mode at temperatures Sleep mode, IVS,SLEEP_HT 25 30 µA
higher than 40°C VS=VOUT,n=VLIN=1
3.5V,
TAMB>40°C
3 Power on threshold according to pin VS VS,PU 4.5 5.0 V
(rising edge)
4 Power down threshold according to pin VS VS,PD 4.2 4.9 V
(falling edge)
5 Hysteresis between power on and power VS,Phys 0.3 V
down threshold*)
*)
Not tested in production
3.2 Current Mode LED Drivers; pin OUTn
Table 3.2-1: Current Mode LED Drivers: Electrical Parameters
No. Description Condition Symbol Min Typ Max Unit
1 Input current at pins OUT n, selectable in PWMLEDn=H, IOUT_n 5 40 mA
5mA Steps ENLEDn=H, VOUT_n
> 0.5V
2 Output current accuracy at pins OUTn PWMLED_n=H, ACCIOUT_n -6 6 %
ENLED=H,
VOUT_n > 0.5V
3 Output current accuracy at pins OUTn con- PWMLED_n=H, ACCIOUT_n,20mA -3 3 %
figured to sink 20mA ENLED=H,
VOUT_n > 0.5V, T
= 25°C, IOUT_n =
20mA
4 10% to 90% rise time of the output current PWMLED_n=L->H, trise,IOUT_n 150 ns
at pins OUTn*) ENLED=H
5 Pull up resistor at pins OUTn to pin VS dur- PWMLED_n=L, RPU,OUT_n 100 kΩ
ing PWM-Low(off state), if configured RPU,OUT_n enabled
6 Pull-up resistance at LED drivers in low Sleep mode or RPU,sleep,OUT_n 30 kΩ
power states standby mode
7 HIGH to LOW threshold at input stage of VGPIO,n,th_L 2.0 V
OUTn
8 LOW to HIGH threshold at input stage of VGPIO,n,th_H 2.8 V
OUTn
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
7 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
No. Description Condition Symbol Min Typ Max Unit
9 Pull down resistor at pins OUTn to pin Digital input RPD,OUT_n 120 kΩ
GND, if digital input is enabled enabled
*)
Not tested in production
3.3 LIN Transceiver with Slave Node Position Detection (SNPD)
3.3.1 LIN Transceiver; pins LIN_M, LIN_S, GND
3.3.1.1 Characteristics
Table 3.3.1.1-1: LIN DC Characteristics
No. Description Condition Symbol Min Typ Max Unit
1 Recessive output voltage driver in recess- VLIN,REC - VS -1 0 V
ive state
2 Dominant output voltage driver in domin- VLIN,DOM 1.2 V
ant state, VS =
7.0V, RLIN =
0.5kΩ to VS
3 Dominant output voltage driver in domin- VLIN,DOM1 2.0 V
ant state, VS =
18V, RLIN =
0.5kΩ to VS
4 Receiver dominant level VLIN,THDOM / VS 0.4
5 Receiver recessive level VLIN,THREC / VS 0.6
6 LIN bus center voltage VLIN,BUSCNT = VLIN,BUSCNT / VS 0.475 0.525
(VLIN,THDOM +
VLIN,THREC) / 2
7 Receiver hysteresis VLIN,THREC - VLIN,HYS / VS 0.175
VLIN,THDOM
8 Output current limitation VLIN = VVS,MAX = ILIN,LIM 40 200 mA
18V
9 Pull up resistance RLIN,SLAVE 27.66 33.00 40.00 kΩ
10 Leakage current flowing into pin LIN transmitter pass- ILIN,BUSREC 20 μA
ive, 7V < VS <
18V, 7V < VLIN <
18V, VLIN > VS
11 Pull up current flowing out of pin LIN transmitter pass- ILIN,BUSDOM -1 mA
ive, VS = 12, VLIN
= 0V
12 Leakage current, ground disconnected VS = 13.5V, 0V < ILIN,NOGND -1 0.1 mA
(VGND = VVS) VLIN < 18V
13 Leakage current, supply disconnected VS = 0V, 0V < ILIN 20 μA
VLIN < 18V
Table 3.3.1.1-2: LIN AC Characteristics
No. Description Condition Symbol Min Typ Max Unit
1 BUS input capacitance*) 7V < VS < 18V CLIN,PIN 30 pF
2 Receive propagation delay tRXD,PDR 6 μs
3 Receive propagation delay symmetry tRXD,SYM -2 2 μs
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
8 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
No. Description Condition Symbol Min Typ Max Unit
4 Wake up debounce time1) tLIN,WU 70 150 μs
5 Duty cycle 12) VLIN,THREC(max) = DLIN,1 0.396 -
0.744*VS,
VLIN,THDOM(max) =
0.581*VS, VS =
7V-18V, TBIT =
50us, DLIN,1 = tBUS-
REC(min)/(2*TBIT)
6 Duty cycle 22) VLIN,THREC(min) = DLIN,2 0.581 -
0.422*VS,
VLIN,THDOM(min) =
0.284*VS, VS =
7.6V-18V, TBIT =
50us, DLIN,2 = tBUS-
REC(max)/(2*T BIT)
7 Duty cycle 32) V,LIN,THREC(max) = DLIN,3 0.417 -
0.778*VS,
VLIN,THDOM(max) =
0.616*VS, VS =
7V-18V, TBIT =
96us, DLIN,3 = tBUS-
REC(min)/(2*TBIT)
8 Duty cycle 42) VLIN,THREC(min) = DLIN,4 0.590 -
0.389*VS,
VLIN,THDOM(min) =
0.251*VS, VS =
7.6V-18V, TBIT =
96us, DLIN,4 = tBUS-
REC(max)/(2*T BIT)
9 Receive data baud rate in kBd/s high speed BLIN,RXD 115
mode,
VS = 13.5V
10 Transmit data baud rate in kBd/s high speed BLIN,TXD 115
mode,
VS = 13.5V
*)
Not tested in production
1)
Defined digitally, tested via scan test
2)
for definition of TBIT see Figure 4.1.1.1-1,
bus load conditions (CLIN,RLIN): 1nF, 1kΩ/6.8nF, 660Ω/10nF, 500Ω
3.3.1.2 LIN Failure detection and recovery
Table 3.3.1.2-1: LIN Failure detection and Recovery: Parameters
No. Description Condition Symbol Min Typ Max Unit
1 time out for TXD dominant clamping failure TxD dominant tLIN,TXD,DOM 8 12 16 ms
timeout detection
enabled
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
9 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
3.3.2 LIN Auto-addressing; pins LIN_M, LIN_S
Table 3.3.2-1: LIN Auto-addressing: Electrical Parameters
No. Description Condition Symbol Min Typ Max Unit
1 Bus pull-up current source for auto-ad- LIN_PHY.LIN_A IPU,AA,2mA -2.16 -2.0 -1.84 mA
dressing A_CONFIG_MO
DESx.
lin_ipu_sel_xxx=
16
2 Bus shunt resistor*) 1) RSHUNT 0.65 1.22 Ω
3 Transimpedance of the AA amplifier in -0.5V < VLIN_M < GAA_DIFF 105
LSB/mA2) 2.5V, -5mA <
ILIN_S < 25mA
*)
Not tested in production
1)
Parameter not individually tested in production. Total gain of auto-addressing path will be tested.
2)
The total transimpedance of auto-addressing path is determined by RSHUNT and ADIFF
Note: The auto-addressing functions have limited ground shift tolerance compared to normal LIN operation.
3.4 Measurement System
3.4.1 12Bit SAR ADC
Table 3.4.1-1: 12Bit SAR ADC: Electrical Parameters
No. Description Condition Symbol Min Typ Max Unit
*)
1 Resolution (bit) N 12 Bit
*)
Not tested in production
3.4.2 Analog Multiplexer (AMUX)
Table 3.4.2-1: Analog Multiplexer: Electrical Parameters
No. Description Condition Symbol Min Typ Max Unit
1 Leakage current into pins OUTn (not selec- 0V ≤ VOUTn ≤ VVS, IOUTn,LEAK 120 nA
ted) channel OUTn
not selected, pull
down resistor not
selected,
T=125°C
2 Input resistance of pin OUTn (selected, 0V ≤ VOUTn ≤ VVS, ROUTn,ACT 500 kΩ
absolute voltage measurement at OUTn) Channel OUTn
selected, pull up
resistor not
selected
*) 1)
3 Settling time of the buffer tbuf,settle 5 µs
4 A to D conversion factor of supply voltage AVS 135 146.25 156
measurement in LSB/V
5 A to D conversion factor of differential LED 1.0V < VS-VOUTn ALEDn 660 780 900
voltage measurement in LSB/V < 5.0V, VOUTn >
2V
6 A to D conversion factor of voltage meas- AOUTn 135 146.25 156
urement at pins OUTn in LSB/V
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
10 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
No. Description Condition Symbol Min Typ Max Unit
7 A to D conversion factor of voltage meas- ADB 1130 1170 1210
urement at pin DB in LSB/V
8 Offset in ADC measurement Valid for chan- AOffset -20 20 LSB
nels DB and
OUTn, ADC
value > 60 LSB
*)
Not tested in production
1)
This time is corresponds to the sampling time extension
3.4.3 Temperature sensor
Table 3.4.3-1: Temperature Sensor: Electrical Parameters
No. Description Condition Symbol Min Typ Max Unit
1 ADC value of temperature measurement in TJ=125°C VTEMP,125°,ADC 1205
LSB
2 Temperature dependency on temperature TCVTEMP,ADC -4.2
measurement in LSB/K*)
3 Over-temperature shut down threshold TJ,OT,high 150 155 °C
4 Over-temperature recovery threshold TJ,OT,low 120 130 °C
*)
Not tested in production
3.5 Wake-up Logic and Power Mode Control
Table 3.5-1: Wake-up locgic and Power Mode Control: Electrical Parameter
No. Description Condition Symbol Min Typ Max Unit
1 Wake-up timer period with ideal oscillator Twu_timer 8.2 ms
frequency of 1MHz
3.6 Microcontroller Unit
3.6.1 Supporting Blocks
3.6.1.1 System Clock RC Oscillator
Table 3.6.1.1-1: System Clock Oscillator: Electrical Parameters
No. Description Condition Symbol Min Typ Max Unit
1 Output frequency FOSC_SYS 46 48 50 MHz
3.6.1.2 General purpose IO & Debug interface; pin DB
Table 3.6.1.2-1: Debug Interface: Electrical Parameters
No. Description Condition Symbol Min Typ Max Unit
1 Input threshold of pin DB (rising) VDB,th,rise 2.0 3.0 V
2 Input threshold of pin DB (falling) VDB,th,fall 1.7 2.7 V
3 Hysteresis of pin DB*) VDB,hys 0.3 V
4 Output voltage at HIGH level IDB = -5mA VDB,out,HIGH 2.7 3.0 3.3 V
5 Output voltage at LOW level IDB = 5mA VDB,out,LOW 0 0.1 0.25 V
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
11 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
No. Description Condition Symbol Min Typ Max Unit
6 Difference voltage between high output VDB,diff_out,th 0.3 V
voltage VDB,out,HIGH and high threshold
VDB,th,rise
7 Pull-up resistance of pin DB when enabled Pull-up enabled RPU,DB 1.1 kΩ
8 Pull-down resistance of pin DB when IC is at power-on RPD,DB 5 kΩ
in reset reset
9 Current sink at pin DB VDB=3.3V IDB,pd 10 mA
10 Time after reset after which the output at Measured after tGPIO3,avail 30 ms
pin DB may be usable POR at µC is
released
*)
Not tested in production
3.6.2 Memory IPs
3.6.2.1 OTP
Table 3.6.2.1-1: OTP: Electrical Parameters
No. Description Condition Symbol Min Typ Max Unit
1 Data Retention Time*) maximum 5 DROTP 15 years
years in active
mode
2 Programming time of a single OTP Bit successful pro- tPROG,OTP_BIT 120 us
(logic 1)*) gramming after
first attempt, no
soak pulses
needed
*)
Not tested in production
3.6.2.2 EEPROM
Table 3.6.2.2-1: Timings
No. Description Condition Symbol Min Typ Max Unit
1 Read access time*) fSYS = 4 MHz tREAD_4MHz 2 us
2 Read access time*) fSYS = 24 MHz tREAD_24MHz 1 us
3 2 x 16 bit page erase time tERASE 4.2 9.0 ms
4 16 bit word program time tPROG 4.2 9.0 ms
5 Data retention of the EEPROM cells*) DREE 15 100 years
6 Endurance of the EEPROM cells*) ENEE 100 k
cycles
7 Cumulative programming events*) 1) write_disturb 12.6 106
*)
Not tested in production
1)
When an address is programmed, the unselected addresses can be subject to a write disturb stress. While a single write disturb event is not a
concern, the cumulative effect of write disturb events can potentially cause bit-flips on the unselected addresses.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
12 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
3.6.3 Sub Parts
3.6.3.1 LIN SCI Module (LINSCI)
Table 3.6.3.1-1: LIN Parameters
No. Description Condition Symbol Min Typ Max Unit
1 Value of accuracy of the byte field detec- tBFS 1/16 2/16 TBIT
tion*)
2 Earliest bit sample time tEBS 7/16 TBIT
tEBS <= tLBS*)
3 Latest bit sample time tLBS 10/16 - TBIT
tEBS <= tLBS*) tBFS
*)
Not tested in production
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
13 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
4 Functional Description
4.1 LIN Transceiver with Slave Node Position Detection (SNPD)
4.1.1 LIN Transceiver; pins LIN_M, LIN_S, GND
4.1.1.1 Characteristics
The LIN bus physical interface is implemented as a LIN 2.2a standard high-voltage single wire interface according
to ISO 9141 for baud rates from 2.4kBds to 20.4kBds. The LIN bus Interface can be operated in Master or Slave
mode. The LIN bus has two logical values. The dominant state - bus voltage near GND - represents logical LOW
level and the recessive state - bus voltage near VS - represents logical HIGH level. In the recessive state, the bus
is pulled high by an internal pull-up resistor and a diode in series, thus no external pull-up components are required
for slave applications. Master applications require an additional external pull-up resistor and a series diode. The
LIN protocol output data stream is converted into the LIN bus signal through a current limited, wave-shaping low-
side driver with control as outlined by the LIN Physical Layer Specification Revision 2.2a. The receiver converts the
data stream from the bus.
Figure 4.1.1.1-1: LIN 2.2 physical layer timing
The LIN transceiver can handle a bus voltage swing from +40V down to ground and survives -27V. The device also
prevents current flow through the LIN pin to the supply pin in case of a ground shift / loss or supply voltage discon-
nection.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
14 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
In sleep mode the LIN block requires a very low quiescent current by using a special wake up comparator allowing
the remote wake up via the LIN bus. The sleep mode can be activated during recessive or dominant level of the
LIN bus line.
To transmit data via LIN bus, the LIN transmitter must be activated. Therefore, bit PHY_CONFIG.lin_on must be
set to H.
4.1.1.2 LIN High Speed Mode
The device supports a LIN high speed mode. This mode allows an increasing of the transmit and receive baud rate
up to 115 kBds. To enter this mode see PHY_CONFIG.lin_hs.
4.1.1.3 LIN Wake Up
The device can be woken up remotely via pin LIN. The wake-up capability is enabled in low power states only.
A falling edge at the pin LIN followed by a dominant bus level VLIN,DOM maintained for a time period of at least tLIN,WU
ended by a rising edge results in a remote wake-up request. The wake-up request is only generated if the IC is in
low power state when the rising edge at pin LIN is applied.
Figure 4.1.1.3-1: LIN wake up at rising edge
4.1.1.4 LIN Failure detection and recovery
The device provides a failure detection for TXD dominant clamping. If TXD is clamped for t LIN,TXD,DOM to dominant the
transmitter is disabled. If TXD is released the failure is cleared and the transmitter is enabled again.
Figure 4.1.1.4-1: LIN TXD dominant failure
4.1.2 LIN Auto-addressing; pins LIN_M, LIN_S
The device supports an auto-addressing feature using the bus shunt method (BSM). If this optional feature is not
used, the pin LIN_S has to be kept open. In this case, the device behaves like a standard LIN transceiver.
The auto-addressing feature added to the normal LIN bus functionality allows slave devices to detect their relative
position within a bus system. The internal hardware extensions needed for that purpose are a shunt resistor
between nodes LIN_M and LIN_S, a pull-up current source and a circuitry that allows to measure the differential
voltage across the shunt resistor. The slaves within such a bus system have to be connected as a daisy-chain. Fig-
ure 4.1.2-1 shows such a bus architecture.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
15 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Figure 4.1.2-1: LIN Bus auto-addressing architecture
On the left side of the schematic, the ECU is terminating the LIN bus. Next to it, there is a group of addressable
slaves, each of them having its own auto-addressing circuitry. Finally, shown on the right side of the schematic,
there may be some standard LIN bus transceivers without auto-addressing capability. They may be mixed up with
the addressable slaves in any possible position.
The start of the addressing sequence is initialized by the ECU with a command sent to the slaves telling them that
the addressing sequence starts with the next break field. During the next break field, each slave starts its auto-ad-
dressing sequence. The sequence is divided up in measuring the offset current on the bus line, measuring the bus
load and, depending on the bus load, switching on the current source for the detection of the last not addressed
slave in the line.
Figure 4.1.2-2: LIN BSM auto-addressing block schematic of a single LIN slave
Figure 4.1.2-2 shows the auto-addressing support circuits of a single slave:
• Pull-up resistor
• Pull-up current source
• Differential to single-ended voltage amplifier with shunt resistor connected to ADC
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
16 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
The different parts can be controlled by software via the registers of the LIN_CTRL Module (e.g. PHY_CONFIG
register). See chapter 4.4.6.8 for details. The ADC can be controlled by the ADC Control Module.
The software can either manage the auto-addressing sequence by accessing the LIN_CTRL registers and following
the sequence shown in the flow chart diagram (Figure 4.1.2-3) or it can enable the implemented auto-addressing
state machine (recommended).
The state machine will step through the flow chart and will automatically set up the pull-up configurations and trig-
ger the ADC measurements as well as calculating the measurement differences and compare the results to
thresholds. Before enabling the state machine, the software has to configure the FSM control registers:
• PHY_CONFIG
• LIN_AA_CONFIG_MODES0 & LIN_AA_CONFIG_MODES1
• LIN_AA_I_DIFF_THD_1 & LIN_AA_I_DIFF_THD_2
The following flowchart shows the command sequence executed during every synch break within the auto-address-
ing process.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
17 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
START
Master sends auto-addressing
command
All slaves
detect break field
All slaves switch off all Step 1
LIN pull-ups (offset phase)
Y Slave already
addressed ?
N
Step 2
Measure bus current ISHUNT1
Step 3
switch on pull-up configuration1
(pre-selection phase)
Step 4
Measure bus current ISHUNT2
Calculate difference
Step 5
IDIFF21 = ISHUNT2 - ISHUNT1
Y IDIFF21 > threshold ?
N
Switch off all LIN pull-up switch on pull-up configuration2
sources, wait for end of step 6 (selection phase)
Step 6
Measure bus current ISHUNT3
Calculate difference
Step 7
IDIFF31 = ISHUNT3 - ISHUNT1
Y IDIFF31 > threshold ?
N
Slave saves NAD contained
in auto-addressing command
All slaves switch off
Pull-up current source and
switch on 30kW LIN pullup
Master
checks: all slaves N
addressed ?
STOP
Figure 4.1.2-3: Flowchart auto-addressing process
In order to assure that the different steps of the auto-addressing sequence are executed synchronously by all the
slaves, a timing scheme for the break field is defined. The time reference is the bit time T BIT,SLAVE. The following tim-
ing diagram shows the requested timing for the different steps executed during the break field.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
18 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Figure 4.1.2-4: Timing diagram auto-addressing process
The LIN auto-addressing measurement scheme is shown in Figure 4.1.2-5. The LIN auto-addressing amplifier has
to be enabled at least tAA,en before it is used. First, the amplifiers auto-zeroing has to be enabled for a time t >
tAA_AZ,act. When auto-zeroing has been finished, the amplifier is settling in t AA,set. After the settling time has elapsed,
the measurements can be done for a time tAA,meas. A new auto-zero sequence has to initiated after this time.
Note: When using the auto-addressing state machine all timings are handled by the FSM. The timings are based
on actual configured baud rate.
Figure 4.1.2-5: LIN auto-addressing measurement timing
4.2 Measurement System
4.2.1 12Bit SAR ADC
The ADC has a resolution of 12Bit. It uses a successive approximation algorithm to convert an input voltage to its
digital representation. The algorithm uses two clock cycles for sampling phase and 12 cycles for conversion. The
clock can be stopped during sampling phase to increase the settling time to ensure a full settling of the S&H stage.
The ADC has two sleep modes:
• Power Down
• No current consumption (except leakage)
• Slow startup
• Standby
• Reduced current consumption
• Fast startup
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
19 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
4.2.2 Analog Multiplexer (AMUX)
Table 4.2.2-1: Analog mulitplexer for ADC measurements
Channel Source Ratio
0 VDIFF_AA 1:1
1 VS 1:8
2 VLED0 (VS-VOUT0) 2:3
3 VLED1 (VS-VOUT1) 2:3
4 VLED2 (VS-VOUT2) 2:3
5 VOUT0 1:8
6 VOUT1 1:8
7 VOUT2 1:8
8 VDB 1:1
9 VTEMP 1:1
Figure 4.2.2-1: Analog multiplexer structure and measurement architecture
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
20 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
The analog multiplexer is used to measure several voltages with the integrated ADC. Therefore, the selected chan-
nel is buffered and then applied to the ADC input. The channels which can be selected are listed in Table 4.2.2-1
with their ratio from the output voltage to the input voltage.
Note: To measure the forward voltage of the LEDs, the pull-up resistor at the corresponding pin has to be enabled.
4.2.3 Temperature sensor
The temperature sensor outputs a voltage which is linearly depended on temperature. The voltage can be meas-
ured via ADC when the corresponding channel is selected.
Additionally, an internal hardware temperature shut down is implemented ensuring the safety of the IC. At over-
temperature events, the IC switches in an extra mode. This is described in 4.3.
4.3 Wake-up Logic and Power Mode Control
Figure 4.3-1: Power modes
The IC has an internal power mode and wake-up logic. This logic includes a state machine which can be controlled
by the microcontroller. Furthermore, another timer is included in the logic. This timer can be used as wake-up timer.
Additionally, the LIN receiver signal is evaluated to detect a wake-up request via LIN (see 4.1.1.3 for further inform-
ation).
Figure 4.3-1 shows the states and the state transitions. After power up, the IC is in NORMAL mode. To go to
SLEEP mode or STANDBY mode, the register POWER.sleep respectively POWER.standby has to be written with
1. If both registers are written at the same time the transition to SLEEP mode is prioritized.
Once in SLEEP or STANDBY mode, the IC can be woken up by LIN or by the wake-up timer. This leads to a trans-
ition to NORMAL mode. All blocks necessary for normal function are enabled during this transition.
The microcontroller can now select the power mode by writing to register POWER in the system state module. Both
states, SLEEP mode and STANDBY mode, behave in the same way except that in STANDBY mode the core regu-
lator stays enabled to maintain the state of the microcontroller, thus the boot process is not needed. The system
clock oscillator and the watchdog clock oscillator are disabled in STANDBY mode.
The wake-up timer is enabled if the timer configuration in register POWER is not 0x00 and the state is either
SLEEP or STANDBY. See chapter 4.3.1 for additional notes on SLEEP and STANDBY mode. If the wake-up timer
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
21 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
is enabled, the wake-up logic will count upwards from zero to the defined value with a period of T WU_timer. When the
configured value is reached, a transition to NORMAL mode is initiated.
To protect the IC, the integrated temperature sensor monitors the temperature in NORMAL mode to detect over-
temperature events. In case of a junction temperature greater than T J,OT,high, the IC goes into OVER-TEMPERAT-
URE mode. This mode is equivalent to SLEEP mode. The transition to NORMAL mode is only initiated, if the junc-
tion temperature falls below TJ,OT,low.
Table 4.3-1: Active blocks in the different power modes
Block SLEEP STANDBY NORMAL OVER-
TEMPERATURE
Wake-up logic & Active Active Active Active
power mode control
Analog supply Active Active Active Active
LIN receiver (low- Active Active Active Active
power mode)
Temperature Sensor - - Active Active
1.8V core regulator - Active Active -
system clock & - - Active -
watchdog clock
LED driver - - Active -
All other blocks - - Active -
(depends on
configuration)
4.3.1 Enter Sleep or Standby Mode
SLEEP Mode:
Switching to SLEEP mode resets the digital part of the IC since the core regulator will be switched off. Waking up
from SLEEP leads to system boot.
STANDBY Mode:
When switching to STANDBY mode it is mandatory to additionally enter the CPU HALT mode for a clean CPU
state during STANDBY. See chapter 4.4.5 for details. Be sure to enable interrupts, e.g. SYS_STATE wake-up
event interrupts to be able to recover from CPU HALT after wake-up.
Recommended procedure:
a) configure and enable wake-up interrupts
b) configure wake-up source, e.g. wake-up timer and set STANDBY bit in SYS_STATE.POWER register
c) set HALT bit in CPU status register
b+c is covered by the provided API function sys_state_go_to_standby.
Note:The API function is based on function code implemented in a ROM section of the memory located at address
0x0002:
go_to_standby():
BIS #0x0018, R2
NOP
NOP
RET
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
22 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
4.4 Microcontroller Unit
Digital Part Description
Figure 4.4-1: Digital Part Block Diagram (Note: Only 128Bytes of EEPROM memory are usable by customer)
4.4.1 Supporting Blocks
4.4.1.1 System Clock RC Oscillator
This oscillator clocks the digital system. The PWM and the OTP block are clocked directly with this clock whereas
the other blocks are clocked with a frequency divided by 2.
4.4.1.2 General purpose IO & Debug interface; pin DB
The Debug interface is used to access the micro controller for debugging purposes. Additionally, it can be used as
a general purpose IO (GPIO3) and analog input.
The input can always be used, whereas the output has to be enabled by TEST_MODE.mode. The enabling is pro-
tected by hardware for a time tGPIO3,avail after reset. This mechanism prevents enabling the general purpose output in
this time after reset and delays it until tGPIO3,avail has elapsed.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
23 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Figure 4.4.1.2-1: GPIO3 output timing
4.4.2 Memory Map
Table 4.4.2-1: Address Table
base address size module name instance name description
0x8000 0x8000 OTP OTP
OTP Memory (Customer Instruction Memory)
0x4000 0x4000 SYS_ROM SYS_ROM
System ROM Memory
0x0B00 0x0500 SRAM SRAM
SRAM Memory
0x0700 0x00A0 EEPROM EEPROM
EEPROM Memory (Only 128Bytes are usable by cus-
tomer)
0x0640 0x40 EEPROM_CTR EEPROM_CTR EEPROM Control Module
L L
0x0600 0x40 OTP_CTRL OTP_CTRL OTP Control Module
0x0440 0x40 PWM PWM LED PWM Module
0x0400 0x40 ADC_CTRL ADC_CTRL ADC Control Module
0x0280 0x40 LIN_CTRL LIN_CTRL LIN PHY Control Module
0x0240 0x40 CRC16 CRC16 CCITT-CRC-16 Module
0x0200 0x40 GPIO GPIO GPIO Module
0x01C0 0x40 LINSCI LINSCI LIN SCI Module
0x0180 0x40 SYS_STATE SYS_STATE System State Module
0x0140 0x40 DIVIDER DIVIDER Divider Module
0x0100 0x40 H430_MUL H430_MUL H430 Multiplier Module
0x00C0 0x40 SWTIMER SWTIMER Timer Module
0x0080 0x40 WDOG WDOG Watchdog Module
0x0040 0x40 VIC VIC Vector Interrupt Controller Module
0x0000 0x40 ROM ROM Start-up ROM
4.4.3 Memory IPs
4.4.3.1 OTP
The micro controller system includes one instance of an OTP IP which is mapped into the address space as
defined by the above Memory Map Table.
The OTP instance is controlled by the OTP_CTRL module.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
24 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
OTP Programming
All memory cells in the macro are initially manufactured as "0"s and their state may be changed from a "0" to a "1"
using the write (program) operation. Once programmed, it is not possible to reverse a "1" to a "0". Programming is
done one cell at a time.
During program operation the "1"s in the data input word, are "burned" into the addressed memory location. "0"s in
the data input word mask programming in the corresponding bit locations.
Typically tPROG,OTP_BIT is needed to program a single logical "1".
Programming is completely controlled by a state machine which can be accessed via the OTP_CTRL module. See
OTP_CTRL register description for details.
The state machine verifies the programmed bit location and, if necessary, repeats programming by inserting "soak
pulses".
The status of the latest word programming can be determined by accessing the OTP_CTRL.PROG_STATUS
register.
4.4.3.2 System ROM (SYS_ROM)
System ROM memory.
• Size: 16Kbyte
• Read only
• Contains standard LIN routines which can be used by the executed user program or boot loader program.
The System ROM content may vary depending on customer requirements and may contains for example:
• Standard LIN routines (LIN stack)
• Standard Elmos boot loader
• Customer specific boot loader delivered by Elmos
• Customer boot loader
4.4.3.3 EEPROM
The EEPROM instance is controlled by the EEPROM_CTRL module.
• lower 64 x 16 Bit for customer usage
• Page erase (2 x 16 Bit) capability
• Word write (1 x 16 Bit) capability
4.4.3.4 SRAM
• Size: 1.25K byte
• Byte write support
• Per byte parity protection
4.4.3.5 Memory Access Protection
• CPU and memory access via JTAG is protected by a logic which has to be set up via JTAG with the correct 64
bit signature value to allow full system access.
• This signature value depends on a 64 bit customer specified signature value which is copied to SYS_STATE
module registers and locked during device INFO boot process before JTAG can halt device CPU for debug
purpose.
• This 64 bit signature should also be used by software to allow memory access via LIN interface.
4.4.4 System Start-up
The digital system start up is done as follows:
• The CPU executes the ROM start up code which checks the OTP memory for a valid boot vector located at
address 0x8004
• If a valid OTP memory boot vector exists:
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
25 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
• The CPU executes the OTP memory start up code which is usually used to initialize the micro controller
analog part calibration registers.
• The CPU returns to ROM start up code
• The CPU fetches the user program reset vector which is located at address 0xFFFE in the OTP memory
which also enables the JTAG interface for CPU debugging
• The CPU starts executing the user program
An OTP boot vector is valid if:
• it's value is even (bit 0 == 0)
• it points into first 0x80 bytes of OTP memory
4.4.5 CPU - H430
Features
• 16 bit CPU
• MSP430 binary code compatible
• Harvard architecture with AHBL data and instruction bus interfaces
• RISC architecture with 27 instructions and 7 addressing modes
• Orthogonal architecture: every instruction usable with every addressing mode
• Full register access including program counter, status registers, and stack pointer
• 16 x 16-bit register
• 64 KByte linear address space
• 16-bit native data bus width
• Constant generator provides six most used immediate values and reduces code size
• Direct memory-to-memory transfers without intermediate register holding
• Word and byte addressing and instruction formats
• IAR development IDE compatible JTAG debug interface
• Several C compilers are available
Figure 4.4.5-1: H430 Environment Example
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
26 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Interrupts
The embedded H430 IP core does not contain a primary interrupt controller. It has only a IRQ request signal and
an address, pointing to a vector table in memory, which contains addresses of the interrupt handlers.
Therefore the H430 IP does not support a fixed number of interrupts. Any number fitting reasonable in the 64k
memory range is supported.
All interrupts can be enabled or disabled with the GIE bit in the status register.
Handling an interrupt (other than RESET) consists of:
• Push PC on stack.
• Push SR on stack.
• Choose the highest priority interrupt to service.
• If there are multiple possible sources, leave them for software to poll.
• Clear the SR, which disables interrupts and power-saving.
• Fetch the interrupt vector into the PC
• Start executing the interrupt handler
A reset is similar, but doesn't save any state.
You can nest interrupt handlers by disabling the current source and setting the GIE bit back to 1.
Byte and Word Issues
The H430 is byte-addressed, and Little-Endian. Word operands must be located at even addresses.
Most instructions have a byte/word bit, which selects the operand size. Appending ".B" to an instruction makes it a
byte operation. Appending ".W" to an instruction, to make it a word operation, is also legal. However, since it is also
the default behavior, if you add nothing, it is generally omitted.
A byte instruction with a register destination clears the high 8 bits of the register to 0. Thus, the following would
clear the top byte of the register, leaving the lower byte unchanged:
MOV.B Rn,Rn
Mostly the on-chip peripherals support only one bus size, e.g. the data width of the processor. These peripherals
must be accesses only with the supported access mode and with correct alignment. Any other access may produce
an undefined behavior.
When performing a word access, address bit 0 is undefined and has to be ignored.
CPU States
The CPU supports the following states:
Table 4.4.5-1: CPU States
state description
RUN • normal operation of the CPU
• the CPU accesses program storage and RAM
• the CPU returns to RUN state on any interrupt
HALT • the CPU is halted
• the HALT state is entered when setting HALT flag in status register
• the CPU does not access program storage or RAM
• the CPU returns to RUN state on any interrupt
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
27 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
CPU Halt Entry
After setting the halt bit in the CPU status register the following instruction will be executed, then halt mode will be
entered. A good idea is to use the following sequence to ensure a later wake up.
BIS #0x18, SR ; sets halt flag and enables interrupts for wake up
NOP ; needed for correct halt entry behavior
CPU Halt Exit
• An interrupt will force the CPU to exit the halt mode. The CPU will enter the interrupt service routine directly.
• After the interrupt routine has been finished the CPU will NOT return to previous halt mode.
• A system reset (e.g. by the watchdog) will restart the device and therefore exit the halt mode.
4.4.5.1 CPU Registers
The processor has 16 16-bit registers, although only 12 of them are truly general purpose. The first four have ded-
icated uses:
4.4.5.1.1 Program Counter (PC)
The 16-bit Program Counter (PC/R0) points to the next instruction to be executed. Each instruction uses an even
number of bytes (two, four, or six), and the PC is incremented accordingly. Instruction accesses in the 64-KB
address space are performed on word boundaries, and the PC is aligned to even addresses. The PC can be
addressed with all instructions and addressing modes.
4.4.5.1.2 Stack Pointer (SP)
The Stack Pointer (SP/R1) is used by the CPU to store the return addresses of subroutine calls and interrupts. It
uses a pre-decrement, post-increment scheme. In addition, the SP can be used by software with all instructions
and addressing modes. The SP is initialized into RAM by the user, and is aligned to even addresses.
4.4.5.1.3 Status Register (SR)
The Status Register (SR/R2), used as a source or destination register, can be used in the register mode only
addressed with word instructions. The remaining combinations of addressing modes are used to support the con-
stant generator.
Table 4.4.5.1.3-1: Register Table
Register Name Address Description
Status Register SR/R2
Table 4.4.5.1.3-2: Register Status Register SR/R2
MSB LSB
Content - - - - - - - 8 - - - 4 3 2 1 0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R R R
Bit Description 8:V
4 : HALT
3 : GIE
2:N
1:Z
0:C
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
28 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
V: Overflow bit
This bit is set when the result of an arithmetic operation overflows the signed-variable range.
HALT: Halt flag
See "CPU States" for details
GIE: Global Interrupt Enable
GIE is the global interrupt enable. Turning off this bit masks interrupts. (NOTE: it may be delayed by 1 cycle, so an
interrupt may be taken after the instruction after GIE is cleared. Add a NOP or clear GIE one instruction earlier than
your "critical section".)
N: Negative bit
This bit is set when the result of a byte or word operation is negative and cleared when the result is not negative.
Word operation: N is set to the value of bit 15 of the result
Byte operation: N is set to the value of bit 7 of the result
Z: Zero bit
This bit is set when the result of a byte or word operation is 0 and cleared when the result is not 0.
C: Carry bit
This bit is set when the result of a byte or word operation produced a carry and cleared when no carry occurred.
4.4.5.1.4 Constant Generation Registers (CG1 / CG2)
Six commonly-used constants are generated with the constant generator registers R2 and R3, without requiring an
additional 16-bit word of program code. This is one of the important features of the H430 instruction set, allowing it
to achieve a high level of code density, and a flexible instruction set.
These constant registers can provide the numbers -1, 1, 2, 4 or 8. So, for example, the "CLR x" is actually emu-
lated by the instruction "MOV #0,x". The constant "0" is taken from the constant register r3. The assembler under-
stands both "CLR x" and "MOV #0,x", and produces the same code for either.
The constants are selected with the source-register addressing modes (As):
Table 4.4.5.1.4-1: Register Table
Register As Value Remarks
R2 00 - Register mode (access R2)
R2 01 (0) Used for absolute address
mode
R2 10 0x0004 Constant +4
R2 11 0x0008 Constant +8
R3 00 0x0000 Constant 0
R3 01 0x0001 Constant +1
R3 10 0x0002 Constant +2
R3 11 0xFFFF Constant -1
The constant generator advantages are:
• No special instructions required
• No additional code word for the six constants
• No code memory access required to retrieve the constant
The assembler uses the constant generator automatically if one of the six constants is used as an immediate
source operand. Registers R2 and R3, used in the constant mode, cannot be addressed explicitly; they act as
source-only registers.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
29 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
4.4.5.1.5 General Purpose Registers (R4 - R15)
The twelve registers, R4-R15, are general-purpose registers. All of these registers can be used as data registers or
address pointers and can be used with byte or word instructions.
4.4.5.2 Addressing Modes
The available H430 instruction addressing modes have at most two operands, a source and a destination.
All instructions are 16 bits long, followed by at most two optional offsets words, one for each of the source and the
destination.
As Modes
The source operand is specified with 2 addressing mode bits (As):
Table 4.4.5.2-1: As Modes
As mnemonic remarks
00 Rn Register direct
01 X(Rn) Register indexed
10 @Rn Register indirect
11 @Rn+ Register indirect with post-increment
Ad Modes
The destination operand is specified with 1 addressing mode bit (Ad):
Table 4.4.5.2-2: Ad Modes
Ad mnemonic remarks
0 Rm Register direct
1 Y(Rm) Register indexed
The only addressing mode that uses an extension word is the indexed mode.
The destination operand in a two-operand instruction has only one addressing mode bit, which selects either
register direct or indexed. Register indirect can obviously be faked up with a zero index.
When r0 (the program counter) is used as a base address, indexed mode provides PC-relative addressing. This is,
in fact, the usual way that the H430 assembler accesses operands when a label is referred to.
@r0 just specifies the following instruction word, but @r0+ specifies that word and skips over it. In other word, an
immediate constant! You can just write #1234 and the assembler will specify the addressing mode properly.
r1, the stack pointer, can be used with any addressing mode, but @r1+ always increments by 2 bytes, even on a
byte access.
Table 4.4.5.2-3: Addressing Modes Table
As/Ad Addressing Mode Syntax Description
00/0 Register mode Rn Register contents are oper-
and
01/1 Indexed mode X(Rn) (Rn + X) point to the oper-
and. X is stored in the next
word.
01/1 Symbolic mode ADDR (Rn + X) point to the oper-
and. X is stored in the next
word. Indexed mode X(PC)
is used.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
30 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
As/Ad Addressing Mode Syntax Description
01/1 Absolute mode &ADDR (Rn + X) point to the oper-
and. X is stored in the next
word. Indexed mode X(0) is
used.
10/- Indirect Register mode @Rn Rn is used as a pointer to
the
11/- Indirect auto increment @Rn+ Rn is used as a pointer to
the operand. Rn is incre-
mented afterwards by 1
for .B instructions and by 2
for .W instructions
11/- Immediate mode #N The word following the
instruction contains the
immediate constant N.
Indirect auto-increment
mode @PC+ is used.
Register Direct
Table 4.4.5.2-4: Register Direct
Assembler Code MOV R10,R11
Length One or two words
Operation Move the content of R10 to R11. R10 is not affected.
Comment Valid for source and destination
Note The data in the register can be accessed using word or byte instructions. If byte instruc-
tions are used, the high byte is always 0 in the result. The status bits are handled accord-
ing to the result of the byte instruction.
Register Indexed
Table 4.4.5.2-5: Register Indexed
Assembler Code MOV 2(R5),6(R6)
Length Two or three words
Operation Move the contents of the source address (contents of R5 + 2) to the destination address
(contents of R6 + 6). The source and destination registers (R5 and R6) are not affected. In
indexed mode, the program counter is incremented automatically so that program execu-
tion continues with the next instruction.
Comment Valid for source and destination
Register Indirect
Table 4.4.5.2-6: Register Indirect
Assembler Code MOV @R10,0(R11)
Length One or two words
Operation Move the contents of the source address (contents of R10) to the destination address
(contents of R11). The registers are not modified.
Comment Valid only for source operand. The substitute for destination operand is 0(Rd).
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
31 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Register Indirect with post increment
Table 4.4.5.2-7: Register Indirect with post-increment
Assembler Code MOV @R10+,0(R11)
Length One or two words
Operation Move the contents of the source address (contents of R10) to the destination address
(contents of R11). Register R10 is incremented by 1 for a byte operation, or 2 for a word
operation after the fetch; it points to the next address without any overhead. This is useful
for table processing.
Comment Valid only for source operand. The substitute for destination operand is 0(Rd) plus second
instruction INCD Rd.
4.4.5.3 Instruction Set
The complete H430 instruction set consists of 27 core instructions and 24 emulated instructions. The core instruc-
tions are instructions that have unique op-codes decoded by the CPU. The emulated instructions are instructions
that make code easier to write and read, but do not have op-codes themselves, instead they are replaced automat-
ically by the assembler with an equivalent core instruction. There is no code or performance penalty for using emu-
lated instruction.
All instructions are 16 bits long, and there are only three instruction formats:
Figure 4.4.5.3-1: Instruction Coding
All single-operand and dual-operand instructions can be byte or word instructions by using .B or .W extensions.
Byte instructions are used to access byte data or byte peripherals. Word instructions are used to access word data
or word peripherals. If no extension is used, the instruction is a word instruction.
The source and destination of an instruction are defined by the following fields:
Table 4.4.5.3-1: Source and destination of an instruction
Abbr. Description
src The source operand defined by As and S-reg
dst The destination operand defined by Ad and D-reg
As The addressing bits responsible for the addressing mode
used for the source (src)
S-reg The working register used for the source (src)
Ad The addressing bits responsible for the addressing mode
used for the destination (dst)
D-reg The working register used for the destination (dst)
B/W Byte or word operation:
0: word operation
1: byte operation
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
32 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Dual Operand Instructions
These basically perform dst = src op dst operations. However, MOV doesn't fetch the destination, and CMP and
BIT do not write to the destination. All are valid in their 8 and 16 bit forms.
+ The status bit is affected
- The status bit is not affected
0 The status bit is cleared
1 The status bit is set
Table 4.4.5.3-2: Dual Operand Instructions
Opcode Mnemonic S-Reg, D-Reg Operation V N Z C Remark
0100 MOV(.B) src, dst dst = src - - - - The status
flags are NOT
set.
0101 ADD(.B) src, dst dst += src + + + +
0110 ADDC(.B) src, dst dst += src + C + + + +
1000 SUB(.B) src, dst dst += ~src + 1 + + + +
0111 SUBC(.B) src, dst dst += ~src + C + + + +
1001 CMP(.B) src, dst dst - src + + + + Sets status
only; the des-
tination is not
written.
1010 DADD(.B) src, dst dst += src + C, 0 + + +
BCD
1011 BIT(.B) src, dst dst & src 0 + + + Sets status
only; the des-
tination is not
written.
1100 BIC(.B) src, dst dst &= ~src - - - - The status
flags are NOT
set.
1101 BIS(.B) src, dst dst |= src - - - - The status
flags are NOT
set.
1110 XOR(.B) src, dst dst ^= src + + + +
1111 AND(.B) src, dst dst &= src 0 + + +
Single Operand Instructions
The status flags are set by RRA, RRC, SXT, and RETI.
The status flags are NOT set by PUSH, SWPB, and CALL.
+ The status bit is affected
- The status bit is not affected
0 The status bit is cleared
1 The status bit is set
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
33 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.5.3-3: Single Operand Instructions
Opcode Mnemonic S-Reg, D-Reg Operation V N Z C Remark
000 RRC(.B) dst C -> MSB -> ... 0 + + + 9-bit rotate
-> LSB -> C right through
carry. Clear
the carry bit
beforehand to
do a logical
right shift.
010 RRA(.B) dst MSB -> MSB 0 + + + Badly named,
->... LSB -> C this is an 8-bit
arithmetic right
shift.
100 PUSH(.B) src SP-2 -> SP - - - - Push operand
src -> @SP on stack. Push
byte decre-
ments SP by
2.
001 SWPB dst swap bytes - - - - The destina-
tion operand
high and low
bytes are
exchanged.
This has no
byte form.
101 CALL src SP-2 -> SP - - - - Fetch operand,
PC+2 -> @SP push PC, then
src -> PC assign oper-
and value to
PC.
Note: the
immediate
form is the
most com-
monly used.
There is no
easy way to
perform a PC-
relative call;
the PC-relative
addressing
mode fetches
a word and
uses it as an
absolute
address. This
has no byte
form.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
34 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Opcode Mnemonic S-Reg, D-Reg Operation V N Z C Remark
110 RETI TOS -> SR + + + + Pop SP, then
SP+2 -> SP pop PC.
TOS -> PC Note: The
SP+2 -> SP CPUOFF flag
will not be
stored to stack
on interrupt
entry, so the
CPU will NOT
return to low-
power mode it
was previously
in.
011 SXT dst Bit 7 -> Bit 0 + + + Sign extend 8
8........Bit 15 bits to 16. No
byte form.
Emulated Instructions
There are a number of zero- and one-operand pseudo-operations that can be built from these two-operand forms.
These are usually referred to as "emulated" instructions:
Table 4.4.5.3-4: Emulated Instructions
Instruction Emulation Remark
NOP MOV r3,r3 Any register from r3 to r15 would do the same thing.
Note: that other forms of a NOP instruction can be constructed as emu-
lated instructions, which take different numbers of cycles to execute.
These can sometimes be useful in constructing accurate timing patterns in
software.
POP dst MOV @SP+,dst
BR dst MOV dst,PC Branch and return can be done by moving to PC (r0)
RET MOV @SP+,PC Branch and return can be done by moving to PC (r0)
CLRC BIC #1,SR The constants were chosen to make status register (r2) twiddling efficient
SETC BIS #1,SR The constants were chosen to make status register (r2) twiddling efficient
CLRZ BIC #2,SR The constants were chosen to make status register (r2) twiddling efficient
SETZ BIS #2,SR The constants were chosen to make status register (r2) twiddling efficient
CLRN BIC #4,SR The constants were chosen to make status register (r2) twiddling efficient
SETN BIS #4,SR The constants were chosen to make status register (r2) twiddling efficient
DINT BIC #8,SR The constants were chosen to make status register (r2) twiddling efficient
EINT BIC #8,SR The constants were chosen to make status register (r2) twiddling efficient
RLA(.B) dst ADD(.B) dst,dst Shift and rotate left is done with add
RLC(.B) dst ADDC(.B) dst,dst Shift and rotate left is done with add
INV(.B) dst XOR(.B) #-1,dst Some common one-operand instructions
CLR(.B) dst MOV(.B) #0,dst Some common one-operand instructions
TST(.B) dst CMP(.B) #0,dst Some common one-operand instructions
DEC(.B) dst SUB(.B) #1,dst Increment and decrement (by one or two)
DECD(.B) dst SUB(.B) #2,dst Increment and decrement (by one or two)
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
35 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Instruction Emulation Remark
INC(.B) dst ADD(.B) #1,dst Increment and decrement (by one or two)
INCD(.B) dst ADD(.B) #2,dst Increment and decrement (by one or two)
ADC(.B) dst ADDC(.B) #0,dst Increment and decrement carry.
DADC(.B) dst DADD(.B) #0,dst Increment and decrement carry.
SBC(.B) dst SUBC(.B) #0,dst Increment and decrement carry.
Relative Jumps
Conditional jumps support program branching relative to the PC and do not affect the status bits. The possible jump
range is from -511 to +512 words relative to the PC value at the jump instruction. The 10-bit program-counter offset
is treated as a signed 10-bit value that is doubled and added to the program counter:
PCnew = PCold + 2 + PCoffset × 2
Table 4.4.5.3-5: Relative Jumps
Opcode Mnemonic Jump Condition
000 JNE/JNZ Z == 0
001 JEQ/JZ Z == 1
010 JNC/JLO C == 0
011 JC/JHS C == 1
100 JN N == 1
101 JGE N == V
110 JL N != V
111 JMP unconditionally
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
36 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
4.4.5.4 Instruction Cycle Counts
Figure 4.4.5.4-1: Cycle Count Table
4.4.5.5 JTAG Debug Interface
To access the debug structures a standard JTAG interface is used.
The debugging logic provides the following features:
• CPU register read and write access
• Data bus (memory) read and write access
• Breakpoint logic
• IAR can be used as debug IDE
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
37 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
The H430 embedded breakpoint logic provides the following features:
• 3 breakpoint triggers
• Each trigger can match a separate address or data bus value
• A trigger value compare mask can be defined
• Trigger can match a greater, smaller, equal or non-equal value
• Trigger can be configured for read / write or instruction fetch / non instruction fetch bus cycles
• Triggers can be combined (trigger dependency)
• All breakpoints can be used for stepping and run-stop a program
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
38 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
4.4.6 Sub Parts
4.4.6.1 Vector Interrupt Control Module (VIC)
Two Stage Vector Interrupt System
Description
The Vector Interrupt System is a two stage interrupt handling structure. The first stage is located inside the interrupt
capable digital modules. The second stage collects all module interrupts and provides a single interrupt signal to
the CPU. All module interrupts provided to the main interrupt controller are level interrupts.
The Vector Interrupt Control (VIC) logic - included in every module and the main interrupt controller - is built as fol-
lows:
The incoming interrupt sources are latched by hold elements if the interrupt source is classified to be an "event".
"level" interrupt sources are not latched to hold elements. "event" interrupt sources are usually conditions which are
active for a very short time and they need to be latched to be handled. Their latched status flag has to be cleared
by the interrupt handling routine. "level" interrupt sources are usually slow signals and their status changes by the
interrupt handling itself which removes the interrupt condition.
The unmasked interrupt status can be read via the IRQ_STATUS register. Writing to the IRQ_STATUS register
clears all "event" status bits which are written as one. The value of IRQ_MASK bit wise makes the interrupt status.
The IRQ_MASK register can be written directly or modified using the IRQ_VENABLE and IRQ_VDISABLE
registers. These two registers implement a fast vector based mask modification possibility.
The masked interrupt status is converted to an integer value and compared with the value of the IRQ_VMAX
register. It defines a maximum interrupt vector level for the outgoing interrupt.
The IRQ_VNO register implements the possibility to read the current interrupt vector of the highest priority. Low
vector numbers have high priority. This value can be used for a fast table based interrupt routine entry. A write
access to the IRQ_VNO register clears the interrupt status bit of the written vector.
VIC Logic Structure:
Figure 4.4.6.1-1: VIC logic structure
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
39 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Two Stage Interrupt System Structure:
Figure 4.4.6.1-2: Two stage interrupt system structure
Features
• IRQ number for fast IRQ processing
• Main IRQ enable to enable or disable all IRQs
• Main IRQ enable MIE for easy cli() and sei() implementation
• IRQ base address for IRQ vector table in memory
• Prioritized IRQ sources where irq 0 has highest priority
• Fast vector based interrupt enable and disable
• Nested IRQ support
Table 4.4.6.1-1: Registers
Register Name Address Description
TABLE_BASE 0x00 Table base register
TABLE_TYPE 0x02 Table type register
MAIN_ENABLE 0x04 IRQ main enable register
IRQ_STATUS 0x30 IRQ status register 0
IRQ_MASK 0x34 IRQ mask register 0
IRQ_VENABLE 0x38 IRQ vector enable register
IRQ_VDISABLE 0x3A IRQ vector disable register
IRQ_VMAX 0x3C IRQ max vector register
IRQ_VNO 0x3E IRQ vector number register
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
40 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.1-2: Register TABLE_BASE (0x00) Table base register
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : base - base address of vector table in memory
Table 4.4.6.1-3: Register TABLE_TYPE (0x02) Table type register
MSB LSB
Content - - - - - - - - - - - - - - - 0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R R R/W
Bit Description 0 : type - auto combine vector number and table base to create vector
number related CPU interrupt pointer.
0: base value is combined with vector number to be used as
CPU interrupt pointer (an interrupt service routine per module)
1: base value is directly used as CPU interrupt pointer (one
common interrupt service routine)
Table 4.4.6.1-4: Register MAIN_ENABLE (0x04) IRQ main enable register
MSB LSB
Content - - - - - - - - - - - - - - - 0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1
Access R R R R R R R R R R R R R R R R/W
Bit Description 0 : enable - main interrupt enable / disable
1: enabled
0: disabled
Table 4.4.6.1-5: Register IRQ_STATUS (0x30) IRQ status register 0
MSB LSB
Content - - - - - - - - 7 6 5 4 3 2 1 0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 7 : lin_ctrl (level)
6 : gpio (level)
5 : swtimer (level)
4 : sci (level)
3 : pwm (level)
2 : adc_ctrl (level)
1 : divider (level)
0 : sys_state (level)
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
41 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.1-6: Register IRQ_MASK (0x34) IRQ mask register 0
MSB LSB
Content - - - - - - - - 7:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 7:0 : mask - enable irq source
1: enabled
0: disabled
Table 4.4.6.1-7: Register IRQ_VENABLE (0x38) IRQ vector enable register
MSB LSB
Content - - - - - - - - - - - - - 2:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R W W W
Bit Description 2:0 : vno - vector number of interrupt to enable
Table 4.4.6.1-8: Register IRQ_VDISABLE (0x3A) IRQ vector disable register
MSB LSB
Content - - - - - - - - - - - - - 2:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R W W W
Bit Description 2:0 : vno - vector number of interrupt to disable
Table 4.4.6.1-9: Register IRQ_VMAX (0x3C) IRQ max vector register
MSB LSB
Content - - - - - - - - - - - - 3:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0
Access R R R R R R R R R R R R R/W R/W R/W R/W
Bit Description 3:0 : vmax - needed for nested interrupt support
software writes current vector number to this register, so only interrupts with higher priority (lower
vector number) can nest
Table 4.4.6.1-10: Register IRQ_VNO (0x3E) IRQ vector number register
MSB LSB
Content - - - - - - - - - - - - 3:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0
Access R R R R R R R R R R R R R/W R/W R/W R/W
Bit Description 3:0 : vno -
read: vector number of enabled pending interrupt with highest priority (smallest vector number).
when no IRQ is pending the first unused irq number is returned.
write: vector number of interrupt event to clear
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
42 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
4.4.6.2 Watchdog Module (WDOG)
Features
• 8 bit pre-scaler
• pre-scaler is driven by system clock
• 16 bit decrementing timer
• this timer is driven by pre-scaled system clock
• the window-watchdog triggers a system reset when counter value = 0
• when system clock is not running or stops the watchdog will assert a system reset
• the watchdog clock is used to implement this feature
• when watchdog clock oscillator is not running or stops a system reset is asserted
• the system clock is used to implement this feature
• window-watchdog timer is disabled after reset and has to be armed by software
• window-watchdog generates a maskable reset when watchdog is restarted outside specified window
• window-watchdog cannot be disabled or changed when armed
• NOTE: watchdog will be halted during CPU debug halt
• NOTE: watchdog will be halted during system standby mode
Figure 4.4.6.2-1: Structure
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
43 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Figure 4.4.6.2-2: Timing
Table 4.4.6.2-1: Registers
Register Name Address Description
CONTROL 0x00 Control register
WINDOW 0x02 Window configuration register
PRESCALER 0x04 Pre-scaler configuration register
RELOAD 0x06 Counter reload value register
COUNTER 0x08 Current counter value register
Table 4.4.6.2-2: Register CONTROL (0x00) Control register
MSB LSB
Content 15:8 - - - - - - 1 0
Reset value 1 0 0 1 0 1 1 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R R R R R R W R/W
Bit Description 15:8 : password -
must be written as 0xA5
will always be read as 0x96
1 : restart -
0 : no influence
1 : restart watchdog
Note: Wait at least 3 watchdog clock periods between two successive restart commands because
the restart command is also used to trigger the watchdog clock guard.
0 : run_enable -
0 - watchdog stopped
1 - watchdog enabled
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
44 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.2-3: Register WINDOW (0x02) Window configuration register
MSB LSB
Content - - - - - - - - - - - 4 3:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 1
Access R R R R R R R R R R R R/W R/W R/W R/W R/W
Bit Description 4 : enable -
0 - window inactive : watchdog can be restarted all the time
1 - window active
3:0 : size -
restart window is defined as: counter value < (2 window size)
Table 4.4.6.2-4: Register PRESCALER (0x04) Pre-scaler configuration register
MSB LSB
Content - - - - - - - - 7:0
Reset value 0 0 0 0 0 0 0 0 1 1 1 1 1 1 1 1
Access R R R R R R R R R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 7:0 : val - watchdog counter pre-scaler (cycles = pre-scaler+1)
Table 4.4.6.2-5: Register RELOAD (0x06) Counter reload value register
MSB LSB
Content 15:0
Reset value 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : val - counter restart value
Table 4.4.6.2-6: Register COUNTER (0x08) Current counter value register
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R R R
Bit Description 15:0 : val - current counter value
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
45 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
4.4.6.3 Multiplier Module (H430_MUL)
The hardware multiplier is a memory mapped peripheral (at a fixed address range from 0x130 to 0x13F). It can be
accessed by CPU with full support of common compilers. Though the hardware architecture is different, the unit is
fully compatible with the MPY16 multiplier unit in chips of the MSP430 family, providing the same interface, soft-
ware support, and arithmetic results.
The barrel shifter extension allows to shift either the 32/33 bit result of the multiply/MAC operation or any other 32
bit value by a variable number of bits. This unit can be accessed by a normal register interface.
Features
• Unsigned/signed multiplication (MPY / MPYS)
• Unsigned/signed MAC (multiply and accumulate) operation (MAC / MACS)
• Using the old result and adding the new product
• 16*16, 8*16, 16*8, and 8*8 bit input data width
• 32/33 bit output data width
• 1 system clock cycle calculation time
• No CPU wait states (no NOP required)
The type of operation to be performed is selected by writing the first operand to one of the following four registers.
Writing the first operand does not start the operation. The first operand (and thus the type of operation) may remain
constant for more than one operation. Writing the second operand starts the operation.
SumLo stores the low word of the result, SumHi stores the high word of the result, and SumExt stores information
about the result.
For signed operations, results are provided in 2's complement format. The sum extension register SUMEXT allows
calculations with results exceeding the 32-bit range. This read-only register holds the most significant part of the
result (bits 32 and higher). The register simplifies multiple word operations, because straightforward additions can
be performed without conditional jumps.
Figure 4.4.6.3-1: Multiplier Structure
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
46 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.3-1: Registers
Register Name Address Description
LAST_MODE 0x00 Last mode of multiply/MAC unit
MPY 0x30 Multiply unsigned register
MPYS 0x32 Multiply signed register
MAC 0x34 Mac unsigned register
MACS 0x36 Mac signed register
OP2 0x38 Operand 2 register
RESLO 0x3A Result register (bits 15:0)
RESHI 0x3C Result register (bits 31:16)
SUMEXT 0x3E Sum extension register
Table 4.4.6.3-2: Register LAST_MODE (0x00) Last mode of multiply/MAC unit
MSB LSB
Content - - - - - - - - - - - - - - 1:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R R R
Bit Description 1:0 : last_mode - last mode of multiply/MAC unit:
0x0 = MPY
0x1 = MPYS
0x2 = MAC
0x3 = MACS
Table 4.4.6.3-3: Register MPY (0x30) Multiply unsigned register
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : op1 - unsigned multiply
Table 4.4.6.3-4: Register MPYS (0x32) Multiply signed register
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : op1 - signed multiply
Table 4.4.6.3-5: Register MAC (0x34) Mac unsigned register
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : op1 - unsigned multiply accumulate
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
47 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.3-6: Register MACS (0x36) Mac signed register
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : op1 - signed multiply accumulate
Table 4.4.6.3-7: Register OP2 (0x38) Operand 2 register
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : op2 - write access starts multiplication
Table 4.4.6.3-8: Register RESLO (0x3A) Result register (bits 15:0)
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : sum_lo - lower 16 bit of result
Table 4.4.6.3-9: Register RESHI (0x3C) Result register (bits 31:16)
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : sum_hi - In case of operation:
MPY: upper 16 bit of result
MPYS: The MSB is the sign of the result. The remaining bits are the upper 15-bits of the result.
Two's complement notation is used for the result.
MAC: upper 16 bit of result
MACS: Upper 16-bits of the result. Two's complement notation is used for the result.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
48 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.3-10: Register SUMEXT (0x3E) Sum extension register
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R R R
Bit Description 15:0 : sum_ext - In case of operation:
MPY: always 0x0000
MPYS: contains the extended sign of the result
0x0000 if result was positive
0xFFFF if result was negative
MAC: contains the carry of the result
0x0000 no carry result
0x0001 result with carry
MPYS: contains the extended sign of the result
0x0000 if result was positive
0xFFFF if result was negative
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
49 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
4.4.6.4 Divider Module (DIVIDER)
Features
• unsigned and signed integer divide arithmetic
• 32bit / 16bit
• 32 bit result
• 16 bit remainder
• 16 system clock cycles calculation time
• If a result or remainder register is accessed before calculation has finished the read access is halted until the
calculation has finished and the value is valid
Table 4.4.6.4-1: Registers
Register Name Address Description
OP1LO 0x00 Operand 1 (low 16 bit)
OP1HI 0x02 Operand 1 (high 16 bit)
OP2 0x04 Unsigned operand 2 register
OP2S 0x06 Signed operand 2 register
RESULTLO 0x08 Result register (low 16 bit)
RESULTHI 0x0A Result register (high 16 bit)
REMAINDER 0x0C Remainder register
IRQ_STATUS 0x30 IRQ status register
IRQ_MASK 0x34 IRQ mask register
IRQ_VENABLE 0x38 IRQ vector enable register
IRQ_VDISABLE 0x3A IRQ vector disable register
IRQ_VMAX 0x3C IRQ max vector register
IRQ_VNO 0x3E IRQ vector number register
Table 4.4.6.4-2: Register OP1LO (0x00) Operand 1 (low 16 bit)
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : op1 - operand 1 (lower 16 bit)
Table 4.4.6.4-3: Register OP1HI (0x02) Operand 1 (high 16 bit)
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : op1 - operand 1 (higher 16 bit)
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
50 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.4-4: Register OP2 (0x04) Unsigned operand 2 register
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : op2 - write access starts unsigned operation
Table 4.4.6.4-5: Register OP2S (0x06) Signed operand 2 register
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : op2 - write access starts signed operation
Table 4.4.6.4-6: Register RESULTLO (0x08) Result register (low 16 bit)
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R R R
Bit Description 15:0 : result - equals "op1 div op2" (lower part)
Table 4.4.6.4-7: Register RESULTHI (0x0A) Result register (high 16 bit)
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R R R
Bit Description 15:0 : result - equals "op1 div op2" (higher part)
Table 4.4.6.4-8: Register REMAINDER (0x0C) Remainder register
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R R R
Bit Description 15:0 : remainder - equals "op1 mod op2"
Table 4.4.6.4-9: Register IRQ_STATUS (0x30) IRQ status register
MSB LSB
Content - - - - - - - - - - - - - - - 0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R R R/W
Bit Description 0 : evt_div_by_zero (event) - divide by zero event
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
51 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.4-10: Register IRQ_MASK (0x34) IRQ mask register
MSB LSB
Content - - - - - - - - - - - - - - - 0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R R R/W
Bit Description 0 : mask - enable irq source
1: enabled
0: disabled
Table 4.4.6.4-11: Register IRQ_VENABLE (0x38) IRQ vector enable register
MSB LSB
Content - - - - - - - - - - - - - - - 0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R R W
Bit Description 0 : vno - vector number of interrupt to enable
Table 4.4.6.4-12: Register IRQ_VDISABLE (0x3A) IRQ vector disable register
MSB LSB
Content - - - - - - - - - - - - - - - 0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R R W
Bit Description 0 : vno - vector number of interrupt to disable
Table 4.4.6.4-13: Register IRQ_VMAX (0x3C) IRQ max vector register
MSB LSB
Content - - - - - - - - - - - - - - - 0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1
Access R R R R R R R R R R R R R R R R/W
Bit Description 0 : vmax - needed for nested interrupt support
software writes current vector number to this register, so only interrupts with higher priority (lower
vector number) can nest
Table 4.4.6.4-14: Register IRQ_VNO (0x3E) IRQ vector number register
MSB LSB
Content - - - - - - - - - - - - - - - 0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1
Access R R R R R R R R R R R R R R R R/W
Bit Description 0 : vno -
read: vector number of enabled pending interrupt with highest priority (smallest vector number).
when no IRQ is pending the first unused IRQ number is returned.
write: vector number of interrupt event to clear
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
52 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
4.4.6.5 System State Module (SYS_STATE)
Features
• Device power management
• Clock frequency selection
• System clock frequency selection : influences CPU and module clock frequency
• PWM module clock frequency selection
• ADC_CTRL will always runs at 24MHz
• Reset source status
• Reset enable
• Reset source based sleep mode entry enable
• Reset sources which are disabled will assert an interrupt if enabled
• Reset sources which are disabled will enter sleep mode if enabled
• Parity protected calibration registers
Note: Once set, RESET_ENABLE, SLEEP_ENABLE and CALIBRATION_LOCK bits cannot be cleared again.
Note: CALIBRATIONx will be locked by CALIBRATION_LOCK. These registers will be initialized and locked
by boot program after power up and are therefore not changeable by customer software.
Table 4.4.6.5-1: Registers
Register Name Address Description
POWER 0x00 Power control register
CONTROL 0x02 System control register
RESET_STATUS 0x04 Reset status register
RESET_STATUS_ 0x06 Reset status clear register
CLEAR
RESET_ENABLE 0x08 Reset enable register
SW_RESET 0x0A Software reset register
SLEEP_ENABLE 0x0C Sleep entry enable register
TEST_MODE 0x0E Test mode config register
SIGNATURE_0 0x10 Customer signature register
SIGNATURE_1 0x12 Customer signature register
SIGNATURE_2 0x14 Customer signature register
SIGNATURE_3 0x16 Customer signature register
OSC_5V_CON- 0x18 5V digital part oscillator control register
TROL
OSC_5V_STATUS 0x1A 5V digital part oscillator status register
TEST_MODE_CO 0x1C Test mode counter register
UNTER
ENABLE_JTAG 0x2C JTAG enable register
IRQ_STATUS 0x30 IRQ status register
IRQ_MASK 0x34 IRQ mask register
IRQ_VENABLE 0x38 IRQ vector enable register
IRQ_VDISABLE 0x3A IRQ vector disable register
IRQ_VMAX 0x3C IRQ max vector register
IRQ_VNO 0x3E IRQ vector number register
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
53 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.5-2: Register POWER (0x00) Power control register
MSB LSB
Content - - - - - - - 8:2 1 0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R W W W W W W W W W
Bit Description 8:2 : wakeup_delay - selects a delay value after which the analogue part wake up timer will wake
up the digital part
0 : never
1-127 : Twu_timer * wakeup_delay
1 : standby - system standby mode activation (fast wakeup mode)
Note: standby requests will be ignored until register TEST_MODE_COUNTER.val value has
reached value 0
0 : sleep - system sleep mode activation
Note: sleep requests will be ignored until register TEST_MODE_COUNTER.val value has
reached value 0
Table 4.4.6.5-3: Register CONTROL (0x02) System control register
MSB LSB
Content - - - - - - - - - - - - - 2 1:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1
Access R R R R R R R R R R R R R R/W R/W R/W
Bit Description 2 : pwm_clk_sel - PWM module clock selection
0 : 24 MHz
1 : 48 MHz
1:0 : sys_clk_sel - system clock selection (CPU and all modules except PWM and ADC_CTRL)
0: 24 MHz
1: 12 MHz
2: 8 MHz
3: 4 MHz
Table 4.4.6.5-4: Register RESET_STATUS (0x04) Reset status register
MSB LSB
Content - - - - - - - 8 7 6 5 4 3 2 1 0
Reset value 0 0 0 0 0 0 0 X X X X X X X X X
Access R R R R R R R R R R R R R R R R
Bit Description 8 : cal_parity - calibration registers parity error reset flag
7 : crc_mismatch - CRC16 calculation mismatch reset flag
6 : watchdog_zero - watchdog counted to zero reset flag
5 : watchdog - watchdog clock watch reset flag
4 : watchdog_window - watchdog window reset flag
3 : sram_parity - SRAM parity reset flag
2 : software - software reset flag
1 : sys_clk_fail - watchdog system clock watch reset flag
0 : v1v8_ok - digital core voltage watch reset flag
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
54 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.5-5: Register RESET_STATUS_CLEAR (0x06) Reset status clear register
MSB LSB
Content - - - - - - - - - - - - - - - 0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R R W
Bit Description 0 : clear - writing clears RESET_STATUS register
Table 4.4.6.5-6: Register RESET_ENABLE (0x08) Reset enable register
MSB LSB
Content - - - - - - - - - 6 5 4 3 2 1 0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R/W R/W R/W R/W R/W R/W R/W
Bit Description 6 : cal_parity - calibration registers parity error reset enable
5 : crc_mismatch - CRC16 calculation mismatch reset enable
4 : watchdog_zero - watchdog counted to zero reset enable
3 : watchdog - watchdog clock watch reset enable
2 : watchdog_window - watchdog window reset enable
1 : sram_parity - SRAM parity reset enable
0 : software - software reset enable
Note: setting these registers to '1' will enable reset via the corresponding source
Table 4.4.6.5-7: Register SW_RESET (0x0A) Software reset register
MSB LSB
Content - - - - - - - - - - - - - - 1 0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 X
Access R R R R R R R R R R R R R R W R
Bit Description 1 : sw_reset - assert a system reset which also clears SW_RESET.por_flag
Note: RESET_ENABLE.software has to be set to 1 before
0 : por_flag - separate Power-On-Reset flag
Table 4.4.6.5-8: Register SLEEP_ENABLE (0x0C) Sleep entry enable register
MSB LSB
Content - - - - - - - - - 6 5 4 3 2 1 0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R/W R/W R/W R/W R/W R/W R/W
Bit Description 6 : cal_parity - calibration registers parity error sleep enable
5 : crc_mismatch - CRC16 calculation mismatch sleep enable
4 : watchdog_zero - watchdog counted to zero sleep enable
3 : watchdog - watchdog clock watch sleep enable
2 : watchdog_window - watchdog window sleep enable
1 : sram_parity - SRAM parity sleep enable
0 : software - software sleep enable
Note: setting these registers to '1' will enable going to sleep via the corresponding source
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
55 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.5-9: Register TEST_MODE (0x0E) Test mode config register
MSB LSB
Content 15:8 7:0
Reset value 1 0 0 1 0 1 1 0 0 1 0 1 1 0 1 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:8 : pass - password
must be written as 0xA5
will always be read as 0x96
7:0 : mode - IC debug mode
default : debug mode ON
switched off by software which disconnects JTAG interface from pins when written with value dif-
ferent than default value
Note: This configuration when changed by software will take affect not earlier than 30ms after
digital core start up. This guarantees a JTAG availability of at least 30ms after digital core start
up. If 2nd level JTAG access signature was written correctly during this time, this register config-
uration will not take affect and device will stay in debug mode.
Table 4.4.6.5-10: Register SIGNATURE_0 (0x10) Customer signature register
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : val - customer specific signature value (bits 15:0)
may be used by software as valid key value to allow instruction memory read via LIN (e.g. an
access key is received via LIN and compared by software with this 64 bit signature value to allow
instruction memory content access)
used by hardware to allow JTAG access to CPU and instruction memory content
Note: Once written, this register cannot be set again.
Table 4.4.6.5-11: Register SIGNATURE_1 (0x12) Customer signature register
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : val - customer specific signature value (bits 31:16)
may be used by software as valid key value to allow instruction memory read via LIN (e.g. an
access key is received via LIN and compared by software with this 64 bit signature value to allow
instruction memory content access)
used by hardware to allow JTAG access to CPU and instruction memory content
Note: Once written, this register cannot be set again.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
56 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.5-12: Register SIGNATURE_2 (0x14) Customer signature register
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : val - customer specific signature value (bits 47:32)
may be used by software as valid key value to allow instruction memory read via LIN (e.g. an
access key is received via LIN and compared by software with this 64 bit signature value to allow
instruction memory content access)
used by hardware to allow JTAG access to CPU and instruction memory content
Note: Once written, this register cannot be set again.
Table 4.4.6.5-13: Register SIGNATURE_3 (0x16) Customer signature register
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : val - customer specific signature value (bits 63:48)
may be used by software as valid key value to allow instruction memory read via LIN (e.g. an
access key is received via LIN and compared by software with this 64 bit signature value to allow
instruction memory content access)
used by hardware to allow JTAG access to CPU and instruction memory content
Note: Once written, this register cannot be set again.
Table 4.4.6.5-14: Register OSC_5V_CONTROL (0x18) 5V digital part oscillator control register
MSB LSB
Content - - - - - - - - - - - - - - - 0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R R W
Bit Description 0 : do_meas -
1: do a 5V digital part oscillator frequency measurement (count system oscillator cycles fitting into
two 5V digital part oscillator cycles)
Table 4.4.6.5-15: Register OSC_5V_STATUS (0x1A) 5V digital part oscillator status register
MSB LSB
Content - - - - - - - 8 7:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R R R
Bit Description 8 : busy - 1 : measurement in progress
7:0 : meas_val - number of system oscillator cycles fitting into two 5V digital part oscillator cycles
Note: measurement is triggered by OSC_5V_CONTROL.do_meas
Note: meas_val is invalid when busy = 1
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
57 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.5-16: Register TEST_MODE_COUNTER (0x1C) Test mode counter register
MSB LSB
Content - 14:0
Reset value 0 1 1 1 0 1 0 1 0 0 1 1 0 0 0 0
Access R R R R R R R R R R R R R R R R
Bit Description 14:0 : val - down counting value which represents the status of the 30ms interval use by
TEST_MODE register
Note: value is decremented by 1 every 1us
Note: sleep and standby requests will be ignored until register value has reached value 0
Table 4.4.6.5-17: Register ENABLE_JTAG (0x2C) JTAG enable register
MSB LSB
Content - - - - - - - - - - - - - - 1 0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R R R/W
Bit Description 1 : exit_boot_loader - exit boot loader request (digital TMR)
0 : enable - enable CPU JTAG access
Table 4.4.6.5-18: Register IRQ_STATUS (0x30) IRQ status register
MSB LSB
Content - - - - 11 10 9 8 7 6 5 4 3 2 1 0
Reset value 0 0 0 0 0 0 0 0 0 0 0 X X X X X
Access R R R R R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 11 : cal_parity (event) - calibration registers parity error event
10 : crc_mismatch (event) - CRC calculation mismatch event
9 : watchdog_zero (event) - watchdog counted to zero event
8 : watchdog (event) - watchdog clock watch event
7 : watchdog_window (event) - watchdog window event
6 : sram_parity (event) - SRAM parity event
5 : software (event) - software reset event triggered by SW_RESET register
4 : jtag_wake_up (event) - standby and sleep state wake up event
3 : temp_wake_up (event) - standby and sleep state wake up event
2 : timer_wake_up (event) - standby and sleep state wake up event
1 : lin_wake_up (event) - standby and sleep state wake up event
0 : por5v_wake_up (event) - standby and sleep state wake up event
Note: Wake-up events can be set after reset, since they may be the wake-up source
Table 4.4.6.5-19: Register IRQ_MASK (0x34) IRQ mask register
MSB LSB
Content - - - - 11:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 11:0 : mask - enable irq source
1: enabled
0: disabled
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
58 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.5-20: Register IRQ_VENABLE (0x38) IRQ vector enable register
MSB LSB
Content - - - - - - - - - - - - 3:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R W W W W
Bit Description 3:0 : vno - vector number of interrupt to enable
Table 4.4.6.5-21: Register IRQ_VDISABLE (0x3A) IRQ vector disable register
MSB LSB
Content - - - - - - - - - - - - 3:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R W W W W
Bit Description 3:0 : vno - vector number of interrupt to disable
Table 4.4.6.5-22: Register IRQ_VMAX (0x3C) IRQ max vector register
MSB LSB
Content - - - - - - - - - - - - 3:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 1 1 0 0
Access R R R R R R R R R R R R R/W R/W R/W R/W
Bit Description 3:0 : vmax - needed for nested interrupt support
software writes current vector number to this register, so only interrupts with higher priority (lower
vector number) can nest
Table 4.4.6.5-23: Register IRQ_VNO (0x3E) IRQ vector number register
MSB LSB
Content - - - - - - - - - - - - 3:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 1 1 0 0
Access R R R R R R R R R R R R R/W R/W R/W R/W
Bit Description 3:0 : vno -
read: vector number of enabled pending interrupt with highest priority (smallest vector number).
when no IRQ is pending the first unused IEQ number is returned.
write: vector number of interrupt event to clear
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
59 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
4.4.6.6 Timer Module (SWTIMER)
This module implements the following features:
Features
• 2 timers
• Pre-divider with:
• Reload value
• Trigger reload possible by software
• Event when zero
• Counter with:
• Reload value
• Trigger reload possible by software
• Can be started / stopped
• Automatic reload possible, otherwise counter stops when reaching zero (single shot mode)
• Event when zero
Using the timers:
1. Set reload values for the counter and pre-scaler
2. Enable the counter via the register CONFIG, choosing between free running and single shot mode
3. Reload/restart the counter and or its pre-scaler by triggering a reload via the command register, e.g. to realign
the phase of several counters
Table 4.4.6.6-1: Registers
Register Name Address Description
CONFIG 0x00 Config register
COMMAND 0x02 Command register
CNT0_RELOAD 0x04 Counter 0 reload value register
CNT1_RELOAD 0x06 Counter 1 reload value register
DIV0_RELOAD 0x08 Pre-divider 0 reload value register
DIV1_RELOAD 0x0A Pre-divider 1 reload value register
CNT0_VALUE 0x0C Counter 0 current value register
CNT1_VALUE 0x0E Counter 1 current value register
IRQ_STATUS 0x30 IRQ status register
IRQ_MASK 0x34 IRQ mask register
IRQ_VENABLE 0x38 IRQ vector enable register
IRQ_VDISABLE 0x3A IRQ vector disable register
IRQ_VMAX 0x3C IRQ max vector register
IRQ_VNO 0x3E IRQ vector number register
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
60 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.6-2: Register CONFIG (0x00) Config register
MSB LSB
Content - - - - - - - - - - - - 3:2 1:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R/W R/W R/W R/W
Bit Description 3:2 : cnt_auto_reloads
1: auto reload for counter n enabled, 0: disabled
1:0 : enables
1: counter n and pre-scaler n enabled, 0: disabled
Disabling a running counter will stop the counter and pre-scaler
immediately.
Table 4.4.6.6-3: Register COMMAND (0x02) Command register
MSB LSB
Content - - - - - - - - - - - - 3:2 1:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R W W W W
Bit Description 3:2 : div_reload_cmd
1: trigger pre-divider n reload / restart
1:0 : cnt_reload_cmd
1: trigger counter n reload / restart
Table 4.4.6.6-4: Register CNT0_RELOAD (0x04) Counter 0 reload value register
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : cnt_reload -
counter reload value (cnt_reload_val = clock cycles -1)
Table 4.4.6.6-5: Register CNT1_RELOAD (0x06) Counter 1 reload value register
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : cnt_reload -
counter reload value (cnt_reload_val = clock cycles -1)
Table 4.4.6.6-6: Register DIV0_RELOAD (0x08) Pre-divider 0 reload value register
MSB LSB
Content - - - - - - - - 7:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 7:0 : div_reload -
pre-divider reload value (div_reload_val = clock cycles -1)
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
61 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.6-7: Register DIV1_RELOAD (0x0A) Pre-divider 1 reload value register
MSB LSB
Content - - - - - - - - 7:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 7:0 : div_reload -
pre-divider reload value (div_reload_val = clock cycles -1)
Table 4.4.6.6-8: Register CNT0_VALUE (0x0C) Counter 0 current value register
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R R R
Bit Description 15:0 : cnt_val -
current counter value (clock cycles = cnt_val +1)
Table 4.4.6.6-9: Register CNT1_VALUE (0x0E) Counter 1 current value register
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R R R
Bit Description 15:0 : cnt_val -
current counter value (clock cycles = cnt_val +1)
Table 4.4.6.6-10: Register IRQ_STATUS (0x30) IRQ status register
MSB LSB
Content - - - - - - - - - - - - 3:2 1:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R/W R/W R/W R/W
Bit Description 3:2 : evt_div_zero (event) -
pre-divider n has been zero
1:0 : evt_cnt_zero (event) -
counter n has been zero
Table 4.4.6.6-11: Register IRQ_MASK (0x34) IRQ mask register
MSB LSB
Content - - - - - - - - - - - - 3:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R/W R/W R/W R/W
Bit Description 3:0 : mask - enable irq source
1: enabled
0: disabled
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
62 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.6-12: Register IRQ_VENABLE (0x38) IRQ vector enable register
MSB LSB
Content - - - - - - - - - - - - - - 1:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R W W
Bit Description 1:0 : vno - vector number of interrupt to enable
Table 4.4.6.6-13: Register IRQ_VDISABLE (0x3A) IRQ vector disable register
MSB LSB
Content - - - - - - - - - - - - - - 1:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R W W
Bit Description 1:0 : vno - vector number of interrupt to disable
Table 4.4.6.6-14: Register IRQ_VMAX (0x3C) IRQ max vector register
MSB LSB
Content - - - - - - - - - - - - - 2:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0
Access R R R R R R R R R R R R R R/W R/W R/W
Bit Description 2:0 : vmax - needed for nested interrupt support
software writes current vector number to this register, so only interrupts with higher priority (lower
vector number) can nest
Table 4.4.6.6-15: Register IRQ_VNO (0x3E) IRQ vector number register
MSB LSB
Content - - - - - - - - - - - - - 2:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0
Access R R R R R R R R R R R R R R/W R/W R/W
Bit Description 2:0 : vno -
read: vector number of enabled pending interrupt with highest priority (smallest vector number).
when no IRQ is pending the first unused IRQ number is returned.
write: vector number of interrupt event to clear
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
63 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
4.4.6.7 LIN SCI Module (LINSCI)
Features
UART Function
• Full duplex operation
• 8N1 data format, standard mark/space NRZ format
• Parity bit (even, odd, zero, none)
• Programmable stop bit length (1,2)
• selectable module clock (sys clock or 4MHz clock based)
LIN Support:
• LIN Master task support
• LIN Header generation (software driven)
• Break generation(programmable break length up to 255 x T Bit)
• SYNC byte transmission
• Break delimiter length: 2
• PID byte transfer
• LIN Slave Task Support
• LIN header processing
• Programmable break detection threshold(9.5xT Bit, 11xTBit)
• Break measurement counter (baud clock based) to detect concurrent break events
• Measurement counter to measure bit times (used for baud rate recovery -> module clock base): Baud
Measurement Results can directly be fed into the baud register to adjust the baud rate (Baud self-synchron-
ization with SYNC byte)
• SYNC Byte plausibility check: check TBit every RXD edge (1us clock based) -> supported baud rates for
plausibility check: 2400 to 115200 BAUD
• LIN response frame processing
• Collision detection with auto transmit shut down
• Auto checksum insertion (classic or enhanced) to transmit frame
• Checksum calculation
• DMA driven transmit/receive
• Timer-Compare Module
• used for
• LIN Bus Idle measurement
• LIN Break measurement (used for auto addressing)
• LIN Header/Frame Length measurement
• auto restart with falling RXD edge
• break detection with auto compare register pre-loading
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
64 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
config
compare_evt
LIN TIMER compare_val
RXD data
data(8) data(8)
dat data(8)
RESYNC
HYST full
eot_evt data_stb RX DMA
fe_evt run
RECEIVER
prty_evt
RX FIFO(1)
brk10_evt
brk11_evt
DATA BUS
read
LIN RX CTRL
brk_evt
sync_err_evt pid_prty_evt
LIN RX BREAK sync_ov_evt conc_brk_evt
rx_2bit_times LIN RX SYNC sync_byte_evt classic_chksum
pid_evt
pid(8)
FRAC DIV Tbit_brk_cnt
config
LIN_AA adc_trigger
FSM adc_data
phy_control
LIN
CHECKSUM
data(8) data(8) data(8)
break break empty TX DMA
full empty run
TXD TRANSMITTER read TX FIFO(1) write
LIN TX CTRL
write DATA BUS
Figure 4.4.6.7-1: SCI block diagram
Functional Description
General function can be derived from Register description.
Concurrent Break Measurement
Concurrent break measurement works independent from the receiver status and detects breaks of length of 10
nominal bit length (respectively 11 nominal bit length when break threshold is set) A valid break signal starts meas-
urement of a SYNC byte. After the SYNC byte measurement the sync_evt interrupt is raised and optionally re-trig-
gers the fractional baud rate counter. Afterwards the PID will be received and the parity will be checked. In case of
a valid parity the pid_evt interrupt will be raised and the PID will be copied to the LIN_PID register.
The concurrent break error flag will only be handled during header processing. The software has to handle occur-
ring concurrent breaks during data transmission (unexpected break event during transfer).
Note: Since concurrent break measurement is based on the actual baud_rate and concurrent break measurement
is also enabled during sync byte measurement the actual baud_rate must not exceed 10 times (respectively 11
times when LIN mode is set) the expected baud rate of the external sci. Otherwise low bits of the sync byte are
detected as breaks and sync break measurement will be canceled:
Condition: Actual baud_rate < 11 times expected external baud_rate
Example: When setting internal baud_rate = 115200 concurrent baud measurement works with external
baud_rates down to 10472 baud. The external baud_rate = 9600 baud cannot be synchronized.
Concurrent break measurement supports the LIN requirement of interrupting ongoing frames by a new break/sync
header.
DMA
Start DMA transfer by writing a length to the LENGTH register. Set a valid base address to the DMA_ADDRESS
register before. Write access to the Address register during DMA operation will be ignored.
The LENGTH register will be decremented, the ADDRESS register will be incremented with each transferred data.
If an error occurs the DMA finish flag will be raised and the DMA controller will stop operation and has to be restar-
ted by accessing the LENGTH register.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
65 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Check DMA_LENGTH register and SCI error flags when DMA finished flag is set to check if the DMA transfer abor-
ted abnormally. Possible error cases are:
• For TXD: transmitter disabled, bus error
• For RXD: receiver disabled, bus error
SCI flags are not suppressed during DMA operation. The FIFO_full flags will be handled by the DMA controller.
Reading/writing of the DATA_IO register is prohibited during DMA operation.
Principle of Baud Rate Synchronization
In principal the baud rate synchronization is based on counting system clock cycles / 4MHz cycles for 8 x TBit. The
result of the bit time measurement can be fed into the fractional baud rate divider register. The error of the meas-
urement is the ratio of the measurement clock to the Bit clock. See the following description for details.
• Sync Byte Measurement:
• Measurement of 8 Bit Times (4 falling edges)
• measurement counter (18bit) running at system clock frequency/4MHz (configurable)
• measurement error8Tbit[%] = Tsysclk x 100 / 8 x Tbit
• Measurement Averaging: divide counter value by 4 and rounding 2 Bit Times in 16bit
• measurement error after averaging and rounding error 2Tbit[%] (Tsysclk/2) x 100 / 2 x Tbit (considering
more accuracy because of rounding)
• Example for 24MHz sys_clk and 20kbaud: 41,66ns/2 x 100 / 2 x 50us = 0,021% Error
• Example for 4MHz sys_clk and 20kbaud: 250ns/2 x 100 / 2 x 50us = 0,125% Error
• The 16 bit bit time measurement result can be fed to the fractional baud rate divider (see LIN_CONFIG.autobaud
function)
• the fractional divider interprets the value as a decimal number with 11 digits left of the decimal point and 5
fractional digits This corresponds to a division by 32
• the output of the fractional divider is a clock 16 times the baud rate (2 x Tbit/32 = Tbit/16). This clock is used
for the LIN transmitter and receiver.
• no granularity error has to be added since the average output frequency corresponds to 16 times the
measured bit rate: generated baud_clk = master_baud_clock + measurement_error
Table 4.4.6.7-1: Registers
Register Name Address Description
BAUD_RATE 0x00 Baud config register
UART_CONFIG 0x02 Control register
LIN_CONFIG 0x04 Configuration of LIN function
LIN_CONTROL 0x06 LIN control
STATUS 0x08 Status register
ERROR 0x0A Error flag register
LIN_CONFIGURA- 0x0C LIN configuration
TION
DATA 0x0E LIN SCI data register
TBIT2_LENGTH 0x10 Length of 2TBit
LIN_PID 0x12 LIN PID
LIN_CHECKSUM 0x14 LIN checksum logic
TIMER 0x16 Timer
TIMER_COUNTER 0x18 Timer Counter
TIMER_COMPARE 0x1A Timer Compare
DMA_TX_ADDRES 0x1C Transmit DMA Address
S
DMA_TX_LENGTH 0x1E Transmit DMA Length
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
66 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Register Name Address Description
DMA_RX_ADDRE 0x20 Receive DMA Address
SS
DMA_RX_LENGTH 0x22 Receive DMA Length
IRQ_STATUS 0x30 IRQ status register
IRQ_MASK 0x34 IRQ mask register
IRQ_VENABLE 0x38 IRQ vector enable register
IRQ_VDISABLE 0x3A IRQ vector disable register
IRQ_VMAX 0x3C IRQ max vector register
IRQ_VNO 0x3E IRQ vector number register
Table 4.4.6.7-2: Register BAUD_RATE (0x00) Baud config register
MSB LSB
Content 15:5 4:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:5 : DIV - SCI baud divisor select
Divisor:
0x000 --> 1 (bypass divider)
0x001 --> 2
0x002 --> 3
...
0x007 --> 8
...
4:0 : FRAC - SCI baud divisor fractional part
These bits select the number of clocks inserted in each 32 output cycle frame to achieve more
timing resolution on the average baud frequency shown in the following table.
FRAC[00000] = 0/32 = 0
FRAC[00001] = 1/32 = 0.03125
FRAC[00010] = 2/32 = 0.0625
...
FRAC[10000] = 16/32 = 0.5
...
FRAC[11111] = 31/32 = 0.96875
The divider can be used to achieve divisor values between 1 and 2047.96875. The baud divisor
fractional part can be used to fine tune the baud rate in 1/32 steps of the divisor.
Use the following formula to calculate the SCI baud rate:
Baud rate = clkbase/(16*(DIV+FRAC))
Note: clkbase is clk_src dependent, see UART_CONFIG register for details.
Note: The 16 bit baud divisor value represents the number of system clock cycles of two bit
lengths. The result of a SYNC byte measurement(see below) can directly be written to the baud
rate register.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
67 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.7-3: Register UART_CONFIG (0x02) Control register
MSB LSB
Content - 14:1 11 10 9 8 - 6 5 4 3:2 1 0
2
Reset value 0 0 1 0 1 0 1 0 0 0 1 0 0 0 0 0
Access R R/W R/W R/W R R/W R/W R/W R R/W R/W R/W R/W R/W R/W R/W
Bit Description 14:12 : debounce - Debounce filter for RXD signal, based on 4MHz clock
filter time: t_debounce = x
0: bypass
1: 500ns
2: 1us
3: 2us
4: 4us
Note: Also consider debounce filter in LIN PHY module
11 : rxd_val
RXD Receiver signal (direct input)
10 : rxd_mask
0: RXD path unmasked, signal will be routed to RX logic
1: RXD path masked, RXD signal will be forced to '1'
9 : txd_val
TXD value register, used when UART_CONFIG.txd_mask=1
8 : txd_mask
0: TXD path unmasked, UART generated TXD will be used
1: TXD logic masked, UART_CONFIG.txd_val will be used as TXD signal (allows cpu generated
txd)
6 : clk_src - Clock source
0: sys clock used as input for fractional BAUD_RATE divider
1: 4Mhz clock used as input for fractional BAUD_RATE divider
5 : mask_brk_err - Mask break errors
0: frame error event and parity error event will be generated even when break is received
1: frame error event and parity error event will be suppressed when break is received
4 : STOP - number of stop bits
0: 1 stop bit
1: 2 stop bits
Note: break delimiter has always 2 stop bits
3:2 : PARITY - parity selection
00: no parity bit
01: parity bit always zero
10: odd parity
11: even parity
1 : TE - transmitter enable
If software clears TE while a transmission is in progress (tx_idle = 0) the frame in the transmit
shift register continues to shift out. To avoid accidentally cutting off the last frame in a message,
always wait for tx_fifo_empty to go high after the last frame before clearing TE.
Note: the transmitter immediately fills the transmit shift register with ones and clears the tx fifo
when a collision event occurs and collision detection is enabled.
0 : RE - receiver enable
RE set to '0' suppresses start bit recognition,
setting RE to '1' during an ongoing transfer can cause erroneous data reception and interrupt
generation
setting RE to '0' during an ongoing transfer can cause erroneous data reception and interrupt
generation, received data should be ignored
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
68 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.7-4: Register LIN_CONFIG (0x04) Configuration of LIN function
MSB LSB
Content - - - - - 10 9 8 7 6 5 4 3 2 1 0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 10 : dma_rx_skip_last - Skip last RX byte during DMA operation
Prevents last byte to be written to memory:
Example: dma_rx_length = 9, DMA will handle 9 incoming
data bytes but only the first 8 are written to memory. DMA finished irq will be generated after 9
data bytes.
Note: Function can be used to prevent checksum to be written
to memory
9 : sync_validation
0: sync byte validation logic disabled
1: sync validation enabled
Note: Recommended for LIN communication
Baud Rates between 2400 und 115200 Hz are supported by SYNC validation hardware. Too
slow Baud Rates lead to sync validation hardware overflow, too fast Baud Rates lead to plausibil-
ity check errors (both resulting in a ERROR.sync_err)
8 : suppress_tx_fb
0: normal function
1: Suppress TXD -> RXD feedback loop when in transmit_mode
Note: received data will be forwarded to checksum logic but not to fifo buffer
7 : chksum_insert - Auto checksum insertion
0: no automatic checksum insertion
1: automatically transmit checksum when DMA TX transfer is finished.
Note: Auto checksum insertion only works in conjunction with DMA transfer and LIN_CON-
TROL.tx_chksum enabled
6 : chksum_type - checksum type selection
0: classic checksum
1: enhanced checksum (includes PID)
Note: see chksum_enable for details
5 : chksum_enable - enable automatic checksum calculation
0: checksum auto feed hardware disabled
1: Add rx/tx data to checksum module (LIN_CONTROL.tx_chksum dependent)
Initialize checksum with each pid_evt (init with zero for classic checksum, init with PID for
enhanced checksum), used checksum type:
for PID 0..59 lin_chksum_type will be used
for PID 60..63 always classic checksum will be used
Note: checksum hardware can also be accessed by software
4 : filter_pid - filter(mask) PID byte
0: pass through PID to receive FIFO
1: do not forward PID byte to receive FIFO
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
69 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
MSB LSB
3 : header_processing - enable header processing
0: function disabled
1: enable receive header processing: BREAK/SYNC sequence will be detected, PID will be
received and validated, SYNC byte will not be forwarded to receive FIFO, PID byte can be option-
ally be forwarded. PID reception initializes the checksum calculation and generates a header
event.
Note: Recommended for LIN communication
Note: RX unit is disabled during sync byte reception to avoid data reception and framing errors.
2 : break_thd - break detection threshold length
0: break detection threshold 9.5 x TBit (UART mode)
1: break detection threshold 11 x TBit (LIN mode)
Note: use msk_brk_err in UART_CONFIG to avoid frame/parity error generation during break
recognition.
1 : collision - TXD collision detection
0: collision detection disabled
1: collision detection enabled while transmitting
Note: if a collision is detected the transmit process will be aborted immediately, an ongoing DMA
transfer will be stopped
Note: only applicable when operating in single line mode (LIN)
Note: Recommended for LIN communication
0 : autobaud - LIN auto setup new baud rate after reception of valid LIN BREAK/SYNC sequence
0: disabled
1: enabled
Note: Recommended for LIN communication
Table 4.4.6.7-5: Register LIN_CONTROL (0x06) LIN control
MSB LSB
Content - - - - - - - - - - - - 3 2 1 0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R/W R/W W W
Bit Description 3 : rx_sleep - temporarily disable receiver logic (sleep)
0: receiver enabled (when UART_CONFIG.re=1)
1: receiver disabled(sleeping), transfers will be finished when rx_sleep is set during ongoing
transfers,
receiver will leave sleep mode when a valid sync event
occurs (valid break/sync sequence received)
Note: rx_sleep can be used to prevent data reception,e.g. when slave is not addressed by master
2 : tx_chksum
0: add rx data to checksum calculation
1: Slave Node transmit Mode:
Add tx data to checksum calculation instead of rx data.
Will be reset to 0 when valid LIN header is detected
Note: only applicable when chksum_enable=1
1 : abort_tx - transmitter abort
stop transmitter, set txd=1, clear tx fifo, reset tx fsm to idle, stop tx DMA
0 : abort_rx - receiver abort
stop receiver, clear rx fifo, reset rx fsm to idle, stop rx DMA, abort SYNC measurements
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
70 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.7-6: Register STATUS (0x08) Status register
MSB LSB
Content - - - - - - - - - 6 5:4 - 3 2 1 0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1
Access R R R R R R R R R R R R R R R R
Bit Description 6 : rx_chksum_valid -
0: current calculated checksum invalid
1: current calculated checksum is valid (0xFF)
Note: bit can be evaluated after reception of complete frame
5:4 : rx_header_state - LIN RX Header state
00: idle/break receiving
01: sync byte receiving
10: PID receiving
3 : tx_fifo_full - Status of tx fifo (fifo depth=1)
2 : rx_fifo_full - Status of rx fifo (fifo depth=1)
1 : TX_IDLE
0: transmit in progress
1: transmitter in idle mode
0 : RX_IDLE
0: receive in progress
1: receiver in idle mode
Table 4.4.6.7-7: Register ERROR (0x0A) Error flag register
MSB LSB
Content - - - - - - - 8 7 6 5 4 3 2 1 0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 8 : txd_timeout - TXD dominat timeout
Write 1 to clear flag
related to bus_err interrupt
flag will be raised when the hardware detects a permanent dominant txd line (see LIN transceiver
chapter for details)
7 : concurrent_brk - Concurrent Break
Write 1 to clear flag
related to bus_err interrupt
flag will be raised when a break occurs during an ongoing transfer
Note: only concurrent breaks during header processing will set the concurrent_brk flag
6 : bus_collision - Bus Collision
Write 1 to clear flag
related to bus_err interrupt
flag will be raised when bus collision is detected during tx
Note: only applicable when collision is enabled in LIN_CONFIG register
5 : pid_parity_err - PID Parity Error
Write 1 to clear flag
related to header_err interrupt
flag will be raised when received PID has wrong parity
Note: only applicable when header_processing is enabled in LIN_CONFIG register
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
71 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
MSB LSB
4 : sync_invalid
Write 1 to clear flag
related to header_err interrupt
flag will be raised when receiver unit is in unexpected state after sync byte measurement
Note: only applicable when header_processing is enabled in LIN_CONFIG register
3 : sync_ov - Sync byte overflow
Write 1 to clear flag
related to header_err interrupt
flag will be raised when sync byte counter overflows, e.g. when time between two edges is too
long
Note: LIN header processing will be stopped when overflow error occurs
2 : sync_err - Sync byte error
Write 1 to clear flag
related to header_err interrupt
flag will be raised when sync byte plausibility check failed
Note: only applicable when sync_validation is enabled in LIN_CONFIG register
Note: LIN header processing will be stopped when error occurs
Note: In error case the RX unit is potentially out of sync. All incoming data should be refused until
next break/sync sequence
1 : parity_err - UART parity error
Write 1 to clear flag
related to receiver_err interrupt
flag will be raised when a parity error is detected
Error flag can be suppressed during break with UART_CONFIG.mask_brk_err
0 : frame_err - UART frame error
Write 1 to clear flag
related to receiver_err interrupt
flag will be raised when no stop bit is present. Break signals will generate a frame error. Error flag
can be suppressed during break with UART_CONFIG.mask_brk_err
Table 4.4.6.7-8: Register LIN_CONFIGURATION (0x0C) LIN configuration
MSB LSB
Content - - - - - - - - 7:4 3 2 1 0
Reset value 0 0 0 0 0 0 0 0 0 1 0 0 1 1 1 1
Access R R R R R R R R R R R R R R R R
Bit Description 7:4 : version
0x0 and 0x8 reserved for former products
3 : dma - DMA module implemented
2 : timer - SCI internal timer module implemented
1 : txd_timeout_reg - TXD timeout enable register implemented
0 : cbm - Concurrent break measurement implemented
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
72 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.7-9: Register DATA (0x0E) LIN SCI data register
MSB LSB
Content - - - - - - - 8 7:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 8 : send_break - send break
write: send break of length ('data'+ 1) x TBit
7:0 : data - sci data register
Write: fill transmit fifo, only applicable when tx_fifo is empty, written byte will be transmitted
Read: read received byte from rx_fifo, only applicable when fifo is full
Note: read access clears the fifo, data can only read once
Table 4.4.6.7-10: Register TBIT2_LENGTH (0x10) Length of 2TBit
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R R R
Bit Description 15:0 : data - result data
Result of latest Sync Byte measurement
Table 4.4.6.7-11: Register LIN_PID (0x12) LIN PID
MSB LSB
Content - - - - - - - - 7:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R R R
Bit Description 7:0 : data - PID data byte
Latest received PID
Table 4.4.6.7-12: Register LIN_CHECKSUM (0x14) LIN checksum logic
MSB LSB
Content - - - - - - - 8 7:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 8 : initialize
0: perform checksum calculation with chksum_val
1: initialize accumulator with chksum_val value
7:0 : chksum_val
write access: add new value to checksum calculation (see initialize flag for details)
read access: current checksum value
Note: Checksum logic will also be fed by receiver logic when chksum_enable bit is set or by
transmitter logic when chksum_enable bit and transmit_mode bit is set. In transmit_mode the
checksum can optionally transmitted at the end of a DMA driven transfer (chksum_insert).
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
73 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.7-13: Register TIMER (0x16) Timer
MSB LSB
Content - - - - - - - - - - 5 4 3:2 1 0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R/W R/W R/W R/W R/W R/W
Bit Description 5 : txd_timeout_e - Enable TXD timeout counter
tLIN,TXD,DOM timeout counter: In case of a dominant TXD signal for a time greater than t LIN,TXD,DOM the
TXD output will be forced to 1. See txd_timeout ERROR flag above.
4 : break_restart - Break Restart
0: no function
1: restart timer when LIN break signal is detected
-> preload timer with 11 x TBit x 16 = 176 (break time when LIN_CONFIG.break_thd==1)
-> preload timer with 9.5 x TBit x 16 = 152 (break time when LIN_CONFIG.break_thd==0)
-> preload compare register with maximum header length
=> 48 x TBit x 16 = 768
Note:a disabled timer will be started when a LIN break signal is detected
Note:only applicable when clk_base=baud_rate and expected baud rate nearly actual baud rate
3:2 : prepare - Timer Prepare
0: normal operation
1: restart timer from 0 when a falling RXD edge is detected.
timer_prepare bit will be reset immediately
2: restart timer from 0 when a falling RXD edge is detected
timer_prepare bit will be reset when a valid break is detected
3: restart timer from 0 when a falling RXD edge is detected
timer_prepare bit will not be reset automatically
Note: As long as timer_prepare is >0 no compare events will be generated, this allows preload-
ing of the timer compare register.timer_prepare works only with timer_enable=1
1 : clk_src - timer_clk_base
Timer counts with
0: 16 x baud rate
1: 1µs clock
0 : enable - Timer Enable
0: timer not running(reset counter to 0)
1: timer running
timer counter is incremented by timer_clk_base
Note: a disabled timer can be auto enabled when a valid break signal is detected and the
'break_restart' bit is set
Table 4.4.6.7-14: Register TIMER_COUNTER (0x18) Timer Counter
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R R R
Bit Description 15:0 : timer_counter - Timer Counter
Timer counter is running when timer is enabled with timer_enable. sci_timer_ov flag is set when
timer overflows.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
74 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.7-15: Register TIMER_COMPARE (0x1A) Timer Compare
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : timer_compare
timer_cmp flag is set when timer reaches timer_compare value
Note: Timer compare flag will not be set when timer_compare=0
Note: Timer compare flag will NOT be set as long as timer_prepare>1. Timer overflow events will
be generated
Table 4.4.6.7-16: Register DMA_TX_ADDRESS (0x1C) Transmit DMA Address
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : dma_tx_addr
Start address of source of transmit data.
Note: Address is incremented with each DMA transfer executed.
Table 4.4.6.7-17: Register DMA_TX_LENGTH (0x1E) Transmit DMA Length
MSB LSB
Content - - - - - - - - 7:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 7:0 : dma_tx_length
Length of data to be transmitted via DMA in BYTE.
Value will be decremented with each transfer.
Write access to register will stop current DMA operation and will restart DMA controller.
Table 4.4.6.7-18: Register DMA_RX_ADDRESS (0x20) Receive DMA Address
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : dma_rx_addr
Start address of destination of receive data.
Note: Address is incremented with each DMA transfer executed.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
75 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.7-19: Register DMA_RX_LENGTH (0x22) Receive DMA Length
MSB LSB
Content - - - - - - - - 7:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 7:0 : dma_rx_length
Length of data to be transmitted via DMA in BYTE.
Value will be decremented with each transfer. Write access to register will stop current DMA
operation and will restart DMA controller.
Table 4.4.6.7-20: Register IRQ_STATUS (0x30) IRQ status register
MSB LSB
Content 15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15 : tick_1ms (event) - generates an interrupt each 1ms
14 : tx_finish_evt (event) - transmit transfer finished, transmitter returned to idle state
13 : tx_dma_finished (event) - transmit dma transfer finished
12 : tx_fifo_empty (level) - transmit fifo empty
11 : rx_dma_finished (event) - receive dma transfer finished
10 : rx_fifo_full (level) - receive fifo full
9 : pid_evt (event) - valid PID received
8 : sync_evt (event) - SYNC byte received
7 : break_evt (event) - valid BREAK detected
6 : header_err (level) - header error occurred, see ERROR register for details
5 : receiver_err (level) - receiver error occurred, see ERROR register for details
4 : bus_err (level) - bus error occurred, see ERROR register for details
3 : sci_timer_ov (event) - SCI timer overflow
2 : sci_timer_cmp (event) - SCI timer compare
1 : rxd_rising (event) - rising edge of RXD signal
0 : rxd_falling (event) - falling edge of RXD signal
Table 4.4.6.7-21: Register IRQ_MASK (0x34) IRQ mask register
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : mask - enable irq source
1: enabled
0: disabled
Table 4.4.6.7-22: Register IRQ_VENABLE (0x38) IRQ vector enable register
MSB LSB
Content - - - - - - - - - - - - 3:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R W W W W
Bit Description 3:0 : vno - vector number of interrupt to enable
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
76 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.7-23: Register IRQ_VDISABLE (0x3A) IRQ vector disable register
MSB LSB
Content - - - - - - - - - - - - 3:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R W W W W
Bit Description 3:0 : vno - vector number of interrupt to disable
Table 4.4.6.7-24: Register IRQ_VMAX (0x3C) IRQ max vector register
MSB LSB
Content - - - - - - - - - - - 4:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0
Access R R R R R R R R R R R R/W R/W R/W R/W R/W
Bit Description 4:0 : vmax - needed for nested interrupt support
software writes current vector number to this register, so only interrupts with higher priority (lower
vector number) can nest
Table 4.4.6.7-25: Register IRQ_VNO (0x3E) IRQ vector number register
MSB LSB
Content - - - - - - - - - - - 4:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0
Access R R R R R R R R R R R R/W R/W R/W R/W R/W
Bit Description 4:0 : vno -
read: vector number of enabled pending interrupt with highest priority (smallest vector number).
when no IRQ is pending the first unused IEQ number is returned.
write: vector number of interrupt event to clear
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
77 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
4.4.6.8 LIN PHY Control Module (LIN_CTRL)
Features
• Configuration Registers of LIN PHY Module
• Auto-addressing(AA) Support FSM
• Keep track of AA break position and auto set configuration signals (pull-up/current source)
• Trigger ADC measurement, auto process ADC results
• Return AA result and generate interrupt
• Software driven ADC measurement when AA FSM is disabled
TXD
LIN_M LINSCI
RXD
LIN_S LIN PHY
WITH
AUTO ADDRESSING linsci_rxd Tbit_brk_cnt
config
phy_control LIN_CTRL result
pull-up config WITH AA FSM irq
adc_trigger
adc_data
ADC
Figure 4.4.6.8-1: LIN_CTRL block diagram
Auto-addressing Hardware Support
The auto-addressing sequence specified in chapter 4.1.2 is supported by a dedicated hardware block.
Features of the hardware support are:
• Automated pull-up configuration handling dependent on the position within the auto-addressing break.
• Position within the break is monitored by a T bit counter
• Pull-up configuration registers LIN_AA_CONFIG_MODESx
• Hardware driven trigger of a the ADC measurement of the shunt current
• Supports two times and four times ADC oversampling
• Hardware driven auto zero signal management
• Calculation of current difference and comparison against threshold values(register LIN_AA_I_DIFF_THD)
• Generation of aa_finished interrupt event when an auto-addressing sequence successfully finished
• Set/reset of aa_store_nad flag which has to be handled by software
• Handling of short auto-addressing breaks (auto abort auto-addressing sequence)
• Handling of errors during auto-addressing sequence
• In case of measurement timeout errors the device behaves like not pre-selected
Enable the hardware support with the PHY_CONFIG.aa_fsm_enable bit.
Set bit PHY_CONFIG.aa_addressed when the device is already addressed.
Use bits PHY_CONFIG.aa_restore_eob and PHY_CONFIG.aa_st5_mid_wait to configure the sequence timing.
Note: When auto-addressing hardware is enabled each falling edge of the RXD signal leads to a start of the auto-
addressing sequence, including the change of the pull-up configuration.
Warning: Since the auto-addressing hardware triggers ADC measurements with high priority the ADC measure-
ments of the currently running application can be delayed.
Note: Software has to consider that shunt measurement has to be finished within the given time in a measurement
step.
This time is limited by:
• Amplifier parameter tAA,meas
• Measurement time window, e.g. 3 x Tbit (baud rate dependent), whereof tAA_AZ,act + tAA,set is used for autozero.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
78 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Since ongoing ADC conversion cannot be interrupted by the auto-addressing ADC trigger, a huge configured
sampling extension can delay the start of the AA measurement and can therefore lead to an aa_adc_timout_evt
error. In addition the sampling extension for the AA measurement must not exceed the given time window. Con-
sider the oversampling config bit PHY_CONFIG.aa_oversampling.
The software has to handle the aa_addressed bit and has to evaluate the resulting aa_store_nad flag.
The hardware follows the auto-addressing sequence in chapter Figure 4.1.2-3 and the timing diagram in chapter
Figure 4.1.2-4.
The following diagram shows the states of the FSM which reflects the sequence:
Reset
STEP0
From all states except STEP6
If (RXD=1)
If AA enabled and falling RXD
reset Tbit counter
STEP1
If end of 1xTbit
Start measurement of ishunt1
If aa_addressed==1
STEP2
If end of 11xTbit and
not aa_restore_eob STEP3
or
If end of 12xTbit and If end of 4xTbit
aa_restore_eob store ishunt1
If end of 5xTbit
Start measurement of ishunt2 always:
If end of 8xTbit and aa_finished event
thd<ishunt2-ishunt1 If thd<ishunt3-ishunt1
STEP4 If end of 8.5xTbit aa_store_nad=0
else
aa_store_nad=1
If end of 8xTbit and
aa_st5_mid_wait=0 and
thd>=ishunt2-ishunt1 STEP5
If RXD=1 and
meas not yet finished
If end of 9xTbit
Start measurement
of ishunt3
If RXD=1 and
ALLOFF STEP6 valid_break and meas finished
If end of 11xTbit and
aa_restore_eob = 0
If end of 12xTbit and
aa_restore_eob STEP7
Offset Mode Pre-sel Mode Selection Mode Default Mode
Figure 4.4.6.8-2: Auto-Addressing FSM
Dependent on the current state of the auto-addressing FSM different pull-up configurations are valid:
1. Default Mode: The default configuration is valid in states STEP0 and STEP7. It is also valid when the auto-ad-
dressing hardware is disabled.
2. Offset Mode: The offset mode configuration is valid in states STEP1, STEP2 and in ALL OFF state. It is used to
measure the offset current on the bus and to disable all pull-up sources when the device is already addressed.
3. Pre-Selection Mode: The pre-selection configuration is valid states STEP3 and STEP4. It is used to selected
the last 3-4 not addressed devices on a bus.
4. Selection Mode: The selection configuration is valid in states STEP5 and STEP6. It is used to select the last
not addressed device on the bus.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
79 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Note: When auto-addressing is implemented completely software driven use the default mode setting to set up the
pull-up configuration for the different phases. In that case the ADC measurement can be triggered by writing to the
LIN_AA_ADC_RESULT register. This is only allowed when the AA FSM is disabled (aa_fsm_enable=0) and when
the amplifier is enabled by software (aa_amp_on=1). A finished ADC conversion will be signaled by
aa_adc_valid_evt interrupt.
Note: Auto-addressing can be implemented partial software driven. Use the configuration bits
PHY_CONFIG.aa_st4_sw_wait and CONTROL.aa_st4_sw_proceed to stop the FSM at STEP4 and wait for soft-
ware intervention. The software has the possibility to decide if the the FSM should proceed with STEP5 or with
state ALLOFF. If no software interaction occurs the FSM will step to state ALLOFF.
Table 4.4.6.8-1: Registers
Register Name Address Description
PHY_CONFIG 0x00 LIN Phy configuration
LIN_AA_STATUS 0x02 Auto Addressing status
LIN_AA_CONFIG_ 0x04 Auto Addressing config modes
MODES0
LIN_AA_CONFIG_ 0x06 Auto Addressing config modes
MODES1
LIN_AA_ADC_RES 0x08 Auto Addressing averaged ADC input
ULT
LIN_AA_I_DIFF_T 0x10 Auto Addressing thresholds
HD_1
LIN_AA_I_DIFF_T 0x12 Auto Addressing thresholds
HD_2
LIN_AA_I_SHUNT 0x14 Auto Addressing I shunt measurement result
_1
LIN_AA_CON- 0x16 Auto Addressing control
TROL
IRQ_STATUS 0x30 IRQ status register
IRQ_MASK 0x34 IRQ mask register
IRQ_VENABLE 0x38 IRQ vector enable register
IRQ_VDISABLE 0x3A IRQ vector disable register
IRQ_VMAX 0x3C IRQ max vector register
IRQ_VNO 0x3E IRQ vector number register
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
80 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.8-2: Register PHY_CONFIG (0x00) LIN Phy configuration
MSB LSB
Content - - - - - 10 9 8 7 6 5 4 3 2 1 0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 10 : aa_disable_adc_trig - Disable FSM generated ADC trigger.
When selected: software has to trigger ADC conversion
Note: aa_adc_timeout checks are disabled in that case
9 : aa_st4_sw_wait - Wait at STEP4 for software intervention.
0: normal operation
1: software triggered decision, use aa_st4_sw_proceed to select next state, if no software trigger
occurs the FSM will goto ALLOFF state
Note: in STEP4, the ADC measurement has to be finshed, otherwise State ALLOFF will be
entered
8 : aa_st5_mid_wait - Step5 middle wait
0: switch to pull-up configuration 2 at begin of step 5
1: wait until middle of step 5 before switching to pull-up configuration 2 (LIN BSM Spec conform)
7 : aa_restore_eob - Restore pull-up settings to defaults in case of FSM driven auto-addressing
0: restore settings after 12 x Tbit
1: restore settings after 13 x Tbit at the end of break (LIN BSM Spec conform)
Note: in both cases pull-up settings will be restored when LIN bus changes to recessive state
6 : aa_oversampling - Auto Addressing oversampling in case of FSM driven auto-addressing
0: two times oversampling
1: four times oversampling
5 : aa_addressed - Auto Addressing Addressed Flag
0: slave not yet addressed
1: slave addressed
Bit has to be managed by SW. The addressed status influences the auto addressing state
machine
4 : aa_fsm_enable - Auto Addressing State Machine
0: FSM disabled
1: in case of a falling RXD signal the auto addressing FSM starts the sequence. ADC trigger sig-
nals will be generated according the aa_oversampling settings.
3 : aa_autozero - Auto Addressing Auto Zero Amplifier
0: Auto Addressing auto zero signal controlled by AA ADC control FSM (recommended)
1: enables LIN Auto Addressing amplifier autozero (use for test only)
2 : aa_amp_on - Auto Addressing Amplifier On
0: Auto Addressing amplifier ON signal controlled by AA FSM
1: enables LIN Auto Addressing amplifier
1 : lin_hs - High speed signal to LIN PHY
0: LIN SCI normal speed (up to 20kBaud)
1: LIN SCI high speed (up to 115,2kBaud) for non-volatile memory programming
0 : lin_on - LIN Phy power mode
0 : reduced power mode (transmitter disabled, wakeups can be detected)
1 : Phy enabled
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
81 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.8-3: Register LIN_AA_STATUS (0x02) Auto Addressing status
MSB LSB
Content - - - - - 10 9 8 7:4 3:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R R R
Bit Description 10 : aa_adc_valid - Auto Addressing LIN_AA_ADC_RESULT register status
0: register not valid
1: register valid
9 : aa_adc_idle - Auto Addressing ADC Measurement status
0: ADC measurement in progress
1: ADC measurement in IDLE state
8 : aa_result - Auto Addressing Result
0: not last device on bus
1: store NAD in Memory
Note:flag will be updated at the end of a valid AA cycle (aa_finished event)
7:4 : fsm_state - AA state machine status
0: STEP0
1: STEP1
2: STEP2
3: STEP3
4: STEP4
5: STEP5
6: STEP6
7: STEP7
8: ALL_OFF
3:0 : tbit_cnt - Tbit counter value
TBit counter during AA break detection. Counting from 1(step 1) to 14(step 7)
Table 4.4.6.8-4: Register LIN_AA_CONFIG_MODES0 (0x04) Auto Addressing config modes
MSB LSB
Content 15:0 - - - - - - - - - - - - - - -
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R/W R/W R/W R/W R/W R/W R/W R R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : Note: Make sure the value of this register is always 0x0001
Table 4.4.6.8-5: Register LIN_AA_CONFIG_MODES1 (0x06) Auto Addressing config modes
MSB LSB
Content 15:0 - - - - - - - - - - - - - - -
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R/W R/W R/W R/W R/W R/W R/W R R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : Note: Make sure the value of this register is always 0x0143
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
82 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.8-6: Register LIN_AA_ADC_RESULT (0x08) Auto Addressing averaged ADC input
MSB LSB
Content - - - - 11:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 11:0 : value - ADC result of I_shunt measurement
read: Averaged result of ADC measurement (two or four times oversampling depending on
aa_oversampling), Value is valid when aa_adc_valid=1. A valid result is signaled by
aa_adc_valid_evt event.
Note: Consider inconsistency of value when measurement is in progress e.g. triggered by the AA
FSM
write: write access triggers i_shunt ADC measurement, use for software driven AA, e.g. when
PHY_CONFIG.aa_disable_adc_trig is set.
Note: To start the measurement the aa_amp_on must be set and the measurement status must
be IDLE
Table 4.4.6.8-7: Register LIN_AA_I_DIFF_THD_1 (0x10) Auto Addressing thresholds
MSB LSB
Content - - - - - - 9:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 9:0 : i_diff_thd_1 - Threshold for step 5
if (Idiff_thd_1 < Ishunt_2 - Ishunt_1) not pre-selected
else pre-selected node
Note:Threshold restricted to 10 bit, threshold will be compared to upper 10 bit of difference of
I_shunt_2 - I_shunt_1.
Table 4.4.6.8-8: Register LIN_AA_I_DIFF_THD_2 (0x12) Auto Addressing thresholds
MSB LSB
Content - - - - - - 9:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 9:0 : i_diff_thd_2 - Threshold for step 7
if (Idiff_thd_2 < Ishunt_3 - Ishunt_1) not selected node
else selected node-> store NAD
Note:Threshold restricted to 10 bit, threshold will be compared to upper 10 bit of difference of
I_shunt_3 - I_shunt_1.
Table 4.4.6.8-9: Register LIN_AA_I_SHUNT_1 (0x14) Auto Addressing I shunt measurement result
MSB LSB
Content - - - - 11:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R R R
Bit Description 11:0 : i_shunt_1 - Result of latest I_SHUNT_1 measurement
Note: i_shunt value will be updated within STEP2 of the LIN Auto-Addressing FSM.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
83 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.8-10: Register LIN_AA_CONTROL (0x16) Auto Addressing control
MSB LSB
Content - - - - - - - - - - - - - - - 0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R R W
Bit Description 0 : aa_st4_sw_proceed - Proceed FSM when in State STEP4
0: goto State ALLOFF
1: goto State STEP5
Note: only applicable when aa_st4_sw_wait is set
Note: next state will be entered aa_st5_mid_wait dependent
Note: internal flag will store the proceed selection, flag will be reset when auto addressing
sequence has finished
Table 4.4.6.8-11: Register IRQ_STATUS (0x30) IRQ status register
MSB LSB
Content - - - - - - - - - - - 4 3 2 1 0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R/W R/W R/W R/W R/W
Bit Description 4 : aa_t_bit_evt (event) - Interrupt event each time the LIN_AA_STATUS.tbit_cnt counter incre-
ments, starting with the falling edge of RXD
3 : aa_adc_valid_evt (event) - auto addressing ADC measurement result valid
2 : aa_adc_timout_evt (event) - auto addressing adc busy timeout, will be asserted when leaving
a measurement STEP but ADC measurement is not yet finished
1 : aa_amp_timout_evt (event) - auto addressing amplifier timeout, will be asserted when adc
measurement exceeds tAA,meas
0 : aa_finished (event) - auto addressing cycle successfully finished
Table 4.4.6.8-12: Register IRQ_MASK (0x34) IRQ mask register
MSB LSB
Content - - - - - - - - - - - 4:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R/W R/W R/W R/W R/W
Bit Description 4:0 : mask - enable irq source
1: enabled
0: disabled
Table 4.4.6.8-13: Register IRQ_VENABLE (0x38) IRQ vector enable register
MSB LSB
Content - - - - - - - - - - - - - 2:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R W W W
Bit Description 2:0 : vno - vector number of interrupt to enable
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
84 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.8-14: Register IRQ_VDISABLE (0x3A) IRQ vector disable register
MSB LSB
Content - - - - - - - - - - - - - 2:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R W W W
Bit Description 2:0 : vno - vector number of interrupt to disable
Table 4.4.6.8-15: Register IRQ_VMAX (0x3C) IRQ max vector register
MSB LSB
Content - - - - - - - - - - - - - 2:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 1
Access R R R R R R R R R R R R R R/W R/W R/W
Bit Description 2:0 : vmax - needed for nested interrupt support
software writes current vector number to this register, so only interrupts with higher priority (lower
vector number) can nest
Table 4.4.6.8-16: Register IRQ_VNO (0x3E) IRQ vector number register
MSB LSB
Content - - - - - - - - - - - - - 2:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 1
Access R R R R R R R R R R R R R R/W R/W R/W
Bit Description 2:0 : vno -
read: vector number of enabled pending interrupt with highest priority (smallest vector number).
when no IRQ is pending the first unused IEQ number is returned.
write: vector number of interrupt event to clear
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
85 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
4.4.6.9 GPIO Module (GPIO)
This module gives access to general purpose digital IOs.
Features
• 4 IOs ( ports )
• Interrupt capable
• Positive IO signal edge interrupt
• Negative IO signal edge interrupt
• IO [0] is connected to LED0 pin
• IO [1] is connected to LED1 pin
• IO [2] is connected to LED2 pin
• IO [3] is connected to PWM3 / debug pin
Figure 4.4.6.9-1: Device IOMUX structure
Note: When going to standby or sleep, the LED drivers have to be disabled.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
86 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.9-1: Registers
Register Name Address Description
SELECT 0x00 Data out register
DATA_OE 0x02 Output enable register
DATA_IN 0x04 Data in register
DATA_IE 0x06 Input enable register
DATA_OUT 0x08 Data out register
IRQ_STATUS 0x30 IRQ status register
IRQ_MASK 0x34 IRQ mask register
IRQ_VENABLE 0x38 IRQ vector enable register
IRQ_VDISABLE 0x3A IRQ vector disable register
IRQ_VMAX 0x3C IRQ max vector register
IRQ_VNO 0x3E IRQ vector number register
Table 4.4.6.9-2: Register SELECT (0x00) Data out register
MSB LSB
Content - - - - - - - - - - - - 3:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R/W R/W R/W R/W
Bit Description 3:0 : select - GPIO select
0 : IO used by PWM module
1 : IO used by GPIO module
Note: If IO is used as output(GPIO or PWM), the corresponding output driver has to be enabled
in the PWM.CONTROL register.
Table 4.4.6.9-3: Register DATA_OE (0x02) Output enable register
MSB LSB
Content - - - - - - - - - - - - 3 2:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R/W R/W R/W R/W
Bit Description 3 : enable3 - GPIO output enable
Related to the structure of the device pin its state will be determined by the input/output setting:
0: input - pin state is undriven (high z)
1: output - pin state defined by GPIO_OUT register
Note: DATA_OE only applies when GPIO is selected by GPIO.SELECT register.
2:0 : enable - GPIO output enable
Related to the structure of the device pin its state will be determined by the input/output setting:
0: input - pin state is undriven (high z)
1: output - pin state is pull down
Note: DATA_OE only applies when GPIO is selected by GPIO.SELECT register.
Note: Pull up resistor required when configured as output.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
87 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.9-4: Register DATA_IN (0x04) Data in register
MSB LSB
Content - - - - - - - - - - - - 3:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R R R
Bit Description 3:0 : data - input data
Note: IO state can also be read throught this register when PWM module is selected by SELECT
register and related GPIO.DATA_IE bits are set.
Table 4.4.6.9-5: Register DATA_IE (0x06) Input enable register
MSB LSB
Content - - - - - - - - - - - - 3:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R/W R/W R/W R/W
Bit Description 3:0 : enable - GPIO input enable
0 : input path disabled
1 : input path enabled
Note: When configured as 0, related DATA_IN bits will be masked to 0.
Note: enable[3] has no effect on masking the input signal from pin DB. The value can always be
read in register DATA_IN
Table 4.4.6.9-6: Register DATA_OUT (0x08) Data out register
MSB LSB
Content - - - - - - - - - - - - 3 - - -
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R/W R R R
Bit Description 3 : data - output data
Table 4.4.6.9-7: Register IRQ_STATUS (0x30) IRQ status register
MSB LSB
Content - - - - -- - - - 7 6 5 4 3 2 1 0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 7 : evt_neg_3 (event) - negative edge event at IO port bit 3
6 : evt_pos_3 (event) - positive edge event at IO port bit 3
5 : evt_neg_2 (event) - negative edge event at IO port bit 2
4 : evt_pos_2 (event) - positive edge event at IO port bit 2
3 : evt_neg_1 (event) - negative edge event at IO port bit 1
2 : evt_pos_1 (event) - positive edge event at IO port bit 1
1 : evt_neg_0 (event) - negative edge event at IO port bit 0
0 : evt_pos_0 (event) - positive edge event at IO port bit 0
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
88 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.9-8: Register IRQ_MASK (0x34) IRQ mask register
MSB LSB
Content - - - - - - - - 7:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 7:0 : mask - enable IRQ source
1: enabled
0: disabled
Table 4.4.6.9-9: Register IRQ_VENABLE (0x38) IRQ vector enable register
MSB LSB
Content - - - - - - - - - - - - - 2:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R W W W
Bit Description 2:0 : vno - vector number of interrupt to enable
Table 4.4.6.9-10: Register IRQ_VDISABLE (0x3A) IRQ vector disable register
MSB LSB
Content - - - - - - - - - - - - - 2:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R W W W
Bit Description 2:0 : vno - vector number of interrupt to disable
Table 4.4.6.9-11: Register IRQ_VMAX (0x3C) IRQ max vector register
MSB LSB
Content - - - - - - - - - - - - 3:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0
Access R R R R R R R R R R R R R/W R/W R/W R/W
Bit Description 3:0 : vmax - needed for nested interrupt support
software writes current vector number to this register, so only interrupts with higher priority (lower
vector number) can nest
Table 4.4.6.9-12: Register IRQ_VNO (0x3E) IRQ vector number register
MSB LSB
Content - - - - - - - - - - - - 3:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0
Access R R R R R R R R R R R R R/W R/W R/W R/W
Bit Description 3:0 : vno -
read: vector number of enabled pending interrupt with highest priority (smallest vector number).
when no IRQ is pending the first unused IRQ number is returned.
write: vector number of interrupt event to clear
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
89 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
4.4.6.10 CCITT-CRC-16 Module (CRC16)
This module can be used to calculate a CCITT-CRC-16 check sum of a configurable memory area.
Features:
• DMA based memory read access
• Concurrent CRC calculation
• CPU starts CRC calculation by writing start address value
• Application can run in parallel with little performance loss. See CONFIG register description. The duration of
the CRC calculation depends on the CONFIG and LENGTH register values.
• CCITT-CRC-16 compatible
• Algorithm parameters:
• Generator polynomial = 0x1021
• Check sum initial value = 0xFFFF
Equivalent C code:
uint16_t calc_ccitt_crc_16(uint16_t *buffer, uint16_t words) {
uint16_t poly = 0x8408; // reverse 0x1021
uint16_t crc = 0xFFFF;
int n, b;
uint8_t *byte_buffer = (uint8_t *)buffer;
int bytes = words * 2;
for (n = 0; n < bytes; n++) {
crc ^= (uint16_t)byte_buffer[n];
for (b = 0; b < 8; b++) {
if (crc & 1) {
crc = (crc >> 1) ^ poly;
} else {
crc = (crc >> 1);
}
}
}
return crc;
}
Table 4.4.6.10-1: Registers
Register Name Address Description
START 0x00 Start address register
LENGTH 0x02 Length register
EXPECTED_CRC 0x04 Expected CRC register
CONFIG 0x06 Configuration register
STATUS 0x08 Status register
CRC_SUM 0x0A CRC sum register
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
90 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.10-2: Register START (0x00) Start address register
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : addr - CRC calculation start address
Note: Address value has to be even !
Writing this register starts CRC calculation and CRC_STATUS.state changes to 0. When CRC
calculation has been finished, CRC_STATUS.state changes to 1 or 2.
Table 4.4.6.10-3: Register LENGTH (0x02) Length register
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : bytes - number of bytes to be included in calculation
Note: Number of bytes has to be even !
Note: Before starting CRC calculation, this value has to be set by Software to a value !=0, other-
wise a maskable reset will be asserted.
Table 4.4.6.10-4: Register EXPECTED_CRC (0x04) Expected CRC register
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : crc - expected CRC sum
Note: This value has to be set by Software before starting CRC calculation.
If calculated CRC sum does not match this value, a maskable reset will be asserted.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
91 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.10-5: Register CONFIG (0x06) Configuration register
MSB LSB
Content - - - - - - - - - - - - 3 2:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1
Access R R R R R R R R R R R R R/W R/W R/W R/W
Bit Description 3 : keep_sum - CRC sum behavior
0 : clear CRC sum to 0xFFFF at start of CRC calculation
1 : use previous sum or set sum as CRC calculation start value
2:0 : timing - CRC unit read access timing
With every CRC module DMA read access the CRC check sum will be "extended" by the read 16
bit data word.
To less influence the CPU performance, CRC calculation read accesses can be done with spa-
cing.
Space between 2 successive CRC reads = (2 timing) - 1
Table 4.4.6.10-6: Register STATUS (0x08) Status register
MSB LSB
Content - - - - - - - - - - - - - - 1:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0
Access R R R R R R R R R R R R R R R R
Bit Description 1:0 : state - CRC unit state
0 : CRC unit is running / CRC calculation is ongoing
1 : last CRC calculation was PASS, CRC unit is ready to be started by software
2 : last CRC calculation was FAIL, CRC unit is ready to be started by software
3 : unused state code
Table 4.4.6.10-7: Register CRC_SUM (0x0A) CRC sum register
MSB LSB
Content 15:0
Reset value 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : crc - calculated CRC sum / CRC sum set register
Note: Calculated CRC sum is only valid when STATUS.state != 0.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
92 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
4.4.6.11 ADC Control Module (ADC_CTRL)
This module implements ADC control functionality.
Features
• PWM based trigger to start ADC conversion
• Variable PWM trigger to ADC channels assignment
• Register based conversion trigger
• ADC result data DMA to a 10 word memory area
• 10 result data update interrupts
• Configurable DMA base address
• ADC data valid status
• Valid, when related PWM channel was ON during ADC sampling
• ADC channel 0 has highest priority
• ADC channel 9 has lowest priority
• ADC conversions will be done in order of their priority
• All trigger events will be halted until the corresponding conversion is executed
The cyclic trigger is automatically generated inside the ADC_CTRL module if the cyclic measurement mode is
used.
Figure 4.4.6.11-1: Structure
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
93 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Figure 4.4.6.11-2: Memory Map Example
Note: When bits in the ORed PWMx_CONFIG are change from '1' to '0' the related pending conversion flags are
cleared immediately.
Trigger Flags Behavior Description
• Trigger events from PWM channels, register trigger or in cyclic mode by the state of the PWMx_CONFIG
registers will be halted by internal trigger flags until they are processed
• The internal trigger flag behavior depends on the cyclic configuration bit
• Non-cyclic mode:
• PWM triggers will set internal trigger flags of all channels configured by the PWM channel related
PWMx_CONFIG registers
• When software writes to REG_TRIGGER register, bits are written as 1 will immediately set related internal
trigger flags
• Internal trigger flags will be processed in order of their priority (from bit 0 to bit 9)
• An internal trigger flag will be cleared when its processing has been started
• When the processing has been finished, the ADC result value will be written to the related ADC channel result
data address
• Cyclic mode:
• PWM triggers will not set internal trigger flags
• When software writes to REG_TRIGGER register, bits are written as 1 will immediately set related internal
trigger flags
• When all internal trigger flags are cleared (are in a cleared state), the internal trigger flags will be set to the
ORed PWMx_CONFIG which means that all bits set in the PWMx_CONFIG registers will lead to set internal
trigger flags
• Internal trigger flags will be processed in order of their priority (from bit 0 to bit 9)
• An internal trigger flag will be cleared when its processing has been started
• When the processing has been finished, the ADC result value will be written to the related ADC channel result
data address
Sample Extension Note
• When using ADC power-mode cycling (ADC_POWER register)
• Please make sure, that the sample extension values are greater than t-WARM-UP (see ADC electrical para-
meter table).
• The ADC is switched to run mode at the beginning of ADC measurement and switched to standby mode after
conversion has been finished.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
94 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Figure 4.4.6.11-3: ADC timing, here a PWM triggered conversion is shown when no ADC conversion is in progress
Table 4.4.6.11-1: Registers
Register Name Address Description
REG_TRIGGER 0x00 Register trigger register
PWM0_CONFIG 0x02 PWM 0 trigger configuration register
PWM1_CONFIG 0x04 PWM 1 trigger configuration register
PWM2_CONFIG 0x06 PWM 2 trigger configuration register
PWM3_CONFIG 0x08 PWM 3 trigger configuration register
CONTROL 0x0A Control register
STATUS 0x0C Conversion status register
ADC_POWER 0x0E ADC power control register
SAMPLE_EXT 0x10 ADC sample time extension
SAMPLE_EXT_VT 0x12 ADC VT sample time extension
DMA_BASE_ADD 0x14 DMA base address
R
SAMPLE_EXT_AA 0x1A ADC AA sample time extension
MUX_OFFSET 0x1C ADC MUX offset register
TRIGGER_DELAY 0x20 PWM 0 trigger delay register
0
TRIGGER_DELAY 0x22 PWM 1 trigger delay register
1
TRIGGER_DELAY 0x24 PWM 2 trigger delay register
2
TRIGGER_DELAY 0x26 PWM 3 trigger delay register
3
IRQ_STATUS 0x30 IRQ status register
IRQ_MASK 0x34 IRQ mask register
IRQ_VENABLE 0x38 IRQ vector enable register
IRQ_VDISABLE 0x3A IRQ vector disable register
IRQ_VMAX 0x3C IRQ max vector register
IRQ_VNO 0x3E IRQ vector number register
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
95 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.11-2: Register REG_TRIGGER (0x00) Register trigger register
MSB LSB
Content - - - - - - 9:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R W W W W W W W W W W
Bit Description 9:0 : trigger - register based trigger
When software sets bits in this register the related ADC channel conversions will be triggered.
Bits can only be added but not cleared by software. Bits will be cleared when related conversion
is started. When bits need to be cleared in this register it is possible to do this by a '1', '0'
sequence of these bits in the ORed PWMx_CONFIG (e.g. by a write sequence to PWM0_CON-
FIG).
bit 0 : ADC channel 0
...
Table 4.4.6.11-3: Register PWM0_CONFIG (0x02) PWM 0 trigger configuration register
MSB LSB
Content - - - - - - 9:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 9:0 : config - configures which ADC channel conversions will be triggered by PWM channel 0
Note: When bits in the ORed PWMx_CONFIG are change from '1' to '0' the related pending con-
version flags are cleared immediately.
Table 4.4.6.11-4: Register PWM1_CONFIG (0x04) PWM 1 trigger configuration register
MSB LSB
Content - - - - - - 9:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 9:0 : config - configures which ADC channel conversions will be triggered by PWM channel 1
Note: When bits in the ORed PWMx_CONFIG are change from '1' to '0' the related pending con-
version flags are cleared immediately.
Table 4.4.6.11-5: Register PWM2_CONFIG (0x06) PWM 2 trigger configuration register
MSB LSB
Content - - - - - - 9:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 9:0 : config - configures which ADC channel conversions will be triggered by PWM channel 2
Note: When bits in the ORed PWMx_CONFIG are change from '1' to '0' the related pending con-
version flags are cleared immediately.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
96 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.11-6: Register PWM3_CONFIG (0x08) PWM 3 trigger configuration register
MSB LSB
Content - - - - - - 9:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 9:0 : config - configures which ADC channel conversions will be triggered by PWM channel 3
Note: When bits in the ORed PWMx_CONFIG are change from '1' to '0' the related pending con-
version flags are cleared immediately.
Table 4.4.6.11-7: Register CONTROL (0x0A) Control register
MSB LSB
Content - - - - - - - - - - - - - - - 0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R R R/W
Bit Description 0 : cyclic - configures ADC conversion behavior
0 : non-cyclic measurement which uses PWM or register triggers to start an ADC channel conver-
sion
1 : cyclic measurement which converts all configured PWM related channels continually
Table 4.4.6.11-8: Register STATUS (0x0C) Conversion status register
MSB LSB
Content - - - - - - 9:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R R R
Bit Description 9:0 : valid - Related PWM channel was active during ADC conversion.
0 : related PWM channel was inactive (OFF) during ADC conversion
1 : related PWM channel was active (ON) during ADC conversion
At the moment the ADC samples an ADC channel the status bit related to this ADC channel is set
to 1 when ALL configured (enabled by PWMx_CONFIG) PWM channels are active (ON) other-
wise the status bit is cleared to 0.
When an ADC channel is only configured (enabled) in one PWMx_CONFIG register, the status
bit is set to 1 when the related PWM channel is active at the moment the ADC samples and
cleared to 0 otherwise.
Delayed PWM triggers will be scheduled and "executed" in order of their priority. It may be hap-
pen that a conversion is done some system clock cycles later than determined by the trigger
delay. The valid flag is set after a conversion when the related PWM output was active during the
ADC conversion else it is cleared.
bit 0 : ADC channel 0 conversion status
...
bit 9 : ADC channel 9 conversion status
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
97 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.11-9: Register ADC_POWER (0x0E) ADC power control register
MSB LSB
Content - - - - - - - - - - - - - - - 0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R R R/W
Bit Description 0 : always_on - force ADC to always ON mode
0 : normal mode : ADC ON will be cycled automatically depending on active ADC triggers (saves
power)
1 : force ADC to stay always ON (needs more power and may only be a fall back solution if auto-
matic power cycling does not work properly)
Table 4.4.6.11-10: Register SAMPLE_EXT (0x10) ADC sample time extension
MSB LSB
Content - - - - - - 9:0
Reset value 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0
Access R R R R R R R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 9:0 : cycles - sample extension for all channels except VT measurement
extend ADC sample time by given number of ADC half clock cycles
Table 4.4.6.11-11: Register SAMPLE_EXT_VT (0x12) ADC VT sample time extension
MSB LSB
Content - - - - - - 9:0
Reset value 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0
Access R R R R R R R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 9:0 : cycles - sample extension for VT measurement channel
extend ADC sample time by given number of ADC half clock cycles
Table 4.4.6.11-12: Register DMA_BASE_ADDR (0x14) DMA base address
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : base_addr - ADC DMA result base address
Table 4.4.6.11-13: Register SAMPLE_EXT_AA (0x1A) ADC AA sample time extension
MSB LSB
Content - - - - - - 9:0
Reset value 0 0 0 0 0 0 0 0 0 1 1 1 0 0 0 0
Access R R R R R R R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 9:0 : cycles - sample extension for LIN AA measurement channel
extend ADC sample time by given number of ADC half clock cycles
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
98 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.11-14: Register MUX_OFFSET (0x1C) ADC MUX offset register
MSB LSB
Content - - - - - - - - - - 5 4:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R/W R/W R/W R/W R/W R/W
Bit Description 5 : static_sel - ADC MUX channel behavior
0 : use hardware generated ADC MUX channel
1 : use offset value to set MUX channel (static)
4:0 : offset - ADC multiplexer channel offset added to trigger based ADC MUX channel to select
different / higher ADC MUX channel.
Note: may only be used during IC test. Leave unchanged in application software.
Note: set to high value (11111) to have mux output disabled/undriven
Table 4.4.6.11-15: Register TRIGGER_DELAY0 (0x20) PWM 0 trigger delay register
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : delay - PWM channel 0 trigger delay (pre-scaled PWM clock cycles between PWM period
start event and ADC conversion triggering)
Table 4.4.6.11-16: Register TRIGGER_DELAY1 (0x22) PWM 1 trigger delay register
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : delay - PWM channel 1 trigger delay (pre-scaled PWM clock cycles between PWM period
start event and ADC conversion triggering)
Table 4.4.6.11-17: Register TRIGGER_DELAY2 (0x24) PWM 2 trigger delay register
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : delay - PWM channel 2 trigger delay (pre-scaled PWM clock cycles between PWM period
start event and ADC conversion triggering)
Table 4.4.6.11-18: Register TRIGGER_DELAY3 (0x26) PWM 3 trigger delay register
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : delay - PWM channel 3 trigger delay (pre-scaled PWM clock cycles between PWM period
start event and ADC conversion triggering)
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
99 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.11-19: Register IRQ_STATUS (0x30) IRQ status register
MSB LSB
Content - - - - - 10 9:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 10 : ready (level) - ADC control ready (no ADC conversion pending or running)
9:0 : evt_update (event) - ADC channel result data update events
bit 0 : ADC channel 0
...
bit 9 : ADC channel 9
Table 4.4.6.11-20: Register IRQ_MASK (0x34) IRQ mask register
MSB LSB
Content - - - - - 10:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 10:0 : mask - enable IRQ source
1: enabled
0: disabled
Table 4.4.6.11-21: Register IRQ_VENABLE (0x38) IRQ vector enable register
MSB LSB
Content - - - - - - - - - - - - 3:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R W W W W
Bit Description 3:0 : vno - vector number of interrupt to enable
Table 4.4.6.11-22: Register IRQ_VDISABLE (0x3A) IRQ vector disable register
MSB LSB
Content - - - - - - - - - - - - 3:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R W W W W
Bit Description 3:0 : vno - vector number of interrupt to disable
Table 4.4.6.11-23: Register IRQ_VMAX (0x3C) IRQ max vector register
MSB LSB
Content - - - - - - - - - - - - 3:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 1 0 1 1
Access R R R R R R R R R R R R R/W R/W R/W R/W
Bit Description 3:0 : vmax - needed for nested interrupt support
software writes current vector number to this register, so only interrupts with higher priority (lower
vector number) can nest
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
100 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.11-24: Register IRQ_VNO (0x3E) IRQ vector number register
MSB LSB
Content - - - - - - - - - - - - 3:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 1 0 1 1
Access R R R R R R R R R R R R R/W R/W R/W R/W
Bit Description 3:0 : vno -
read: vector number of enabled pending interrupt with highest priority (smallest vector number).
when no IRQ is pending the first unused IRQ number is returned.
write: vector number of interrupt event to clear
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
101 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
4.4.6.12 LED PWM Module (PWM)
This module implements the PWM functionality.
Features
• 3x Low-side LED driver configuration and 1x digital output configuration (GPIO3)
• 4 x 8 bit pre-scaler
• 4 x 16 bit PWM channel with independent period length, pulse start and pulse stop timestamps
• External PWM signal polarity configuration
• Period, pulse start and pulse stop interrupts per channel
• PWM channel related trigger delay (timestamp) configuration (see ADC_CTRL module)
• Pre-scaler, period, pulse start, pulse stop, polarity and ADC_CTRL.trigger_delay configurations will be loaded
into active (current) registers with channel related period event
• START-STOP cases
• start < stop : PWM pulse length > 0
• ON at start
• OFF at stop
• start == stop : PWM pulse length = 0
• 0% ON
• start == 0, stop == period
• 100% ON
• start > stop : PWM pulse length > 0 (inverted pulse form behaviour)
• OFF at stop
• ON at start
Figure 4.4.6.12-1: Structure
PWM ON cycles in relation to (stop-start):
Please note: The picture shows the none continuous transition at 0 where (stop-start) changes its sign.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
102 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Figure 4.4.6.12-2: Relationship of output duty cycle to stop-start
POLARITY.pwm_term:
Figure 4.4.6.12-3: PWM termination
Start Stop PWM Timing Examples:
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
103 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Figure 4.4.6.12-4: PWM output behavior in relation to the setting of start and stop(1)
Figure 4.4.6.12-5: PWM output behavior in relation to the setting of start and stop(2)
Note: When going to sleep, the LED drivers have to be disabled.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
104 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.12-1: Registers
Register Name Address Description
CONTROL 0x00 Control register
DRIVER 0x02 Driver config register
STATUS 0x04 Status registers
POLARITY 0x06 Polarity config register
PRESCALER0 0x08 Pre-scaler 0 config register
PRESCALER1 0x0A Pre-scaler 1 config register
PRESCALER2 0x0C Pre-scaler 2 config register
PRESCALER3 0x0E Pre-scaler 3 config register
PERIOD0 0x10 Channel 0 period config register
START0 0x12 Channel 0 pulse start config
STOP0 0x14 Channel 0 pulse stop config
COUNTER0 0x16 Channel 0 current counter value
PERIOD1 0x18 Channel 1 period config register
START1 0x1A Channel 1 pulse start config
STOP1 0x1C Channel 1 pulse stop config
COUNTER1 0x1E Channel 1 current counter value
PERIOD2 0x20 Channel 2 period config register
START2 0x22 Channel 2 pulse start config
STOP2 0x24 Channel 2 pulse stop config
COUNTER2 0x26 Channel 2 current counter value
PERIOD3 0x28 Channel 3 period config register
START3 0x2A Channel 3 pulse start config
STOP3 0x2C Channel 3 pulse stop config
COUNTER3 0x2E Channel 3 current counter value
IRQ_STATUS 0x30 IRQ status register
IRQ_MASK 0x34 IRQ mask register
IRQ_VENABLE 0x38 IRQ vector enable register
IRQ_VDISABLE 0x3A IRQ vector disable register
IRQ_VMAX 0x3C IRQ max vector register
IRQ_VNO 0x3E IRQ vector number register
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
105 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.12-2: Register CONTROL (0x00) Control register
MSB LSB
Content - - - - - - - - 7 6 5 4 3 2 1 0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 7 : driver_3_enable - enable channel 3 output driver
Note: This bit enables channel 3 output driver stage regardless of GPIO.SELECT configuration.
6 : driver_2_enable - enable channel 2 output driver
Note: This bit enables channel 2 output driver stage regardless of GPIO.SELECT configuration.
5 : driver_1_enable - enable channel 1 output driver
Note: This bit enables channel 1 output driver stage regardless of GPIO.SELECT configuration.
4 : driver_0_enable - enable channel 0 output driver
Note: This bit enables channel 0 output driver stage regardless of GPIO.SELECT configuration.
3 : pwm_3_enable - enable channel 3 PWM generator
2 : pwm_2_enable - enable channel 2 PWM generator
1 : pwm_1_enable - enable channel 1 PWM generator
0 : pwm_0_enable - enable channel 0 PWM generator
Table 4.4.6.12-3: Register DRIVER (0x02) Driver config register
MSB LSB
Content - - -12:1 9:7 6:4 3:0
0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 12:10 : led2_current - LED2 driver current selection
IOUT2 = 5mA * (led2_current + 1)
9:7 : led1_current - LED1 driver current selection
IOUT1 = 5mA * (led1_current + 1)
6:4 : led0_current - LED0 driver current selection
IOUT0 = 5mA * (led0_current + 1)
3:0 : pull -
0 : no pull active
1 : internal pull active (prevents related LED from emitting light when the driver is switched off)
Note: Pull-up has to be enabled for measuring the LED forward voltage.
bit 0 : LED0 driver
bit 1 : LED1 driver
bit 2 : LED2 driver
bit 3 : DB pin
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
106 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.12-4: Register STATUS (0x04) Status registers
MSB LSB
Content - - - - - - - - - - - 4 3 2 1 0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R R R
Bit Description 4 : running - "running" is set if at least one PWM channel is enabled. After disabling all PWM
channels, the PWM may run some clock cycles until it is stopped. This time is caused by the
PWM pre-scaler logic. When PWM enters stopped state, the "running" flag will be cleared.
3 : pwm3 - PWM channel 3 state
2 : pwm2 - PWM channel 2 state
1 : pwm1 - PWM channel 1 state
0 : pwm0 - PWM channel 0 state
Table 4.4.6.12-5: Register POLARITY (0x06) Polarity config register
MSB LSB
Content - - - - 11:8 7:4 3:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 11:8 : pwm_zero - PWM signal behavior selection
0 : no end of period PWM signal clear
1 : clear PWM signal at end of period to zero level
Note: pwm_zero has higher priority than pwm_term
7:4 : pwm_term - PWM signal behavior selection
0 : no end of period PWM signal terminate
1 : terminate PWM signal at end of period to next period default level (0 at normal mode, 1 at
inverse mode)
Note: inverse mode means : stop < start
3:0 : pwm_polarity - PWM signal polarity configuration
0 : off level = 0
1 : off level = 1
Table 4.4.6.12-6: Register PRESCALER0 (0x08) Pre-scaler 0 config register
MSB LSB
Content - - - - - - - - 7:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 7:0 : val - PWM pre-scaler reload config register
period = val+1 [PWM module frequency cycles]
Table 4.4.6.12-7: Register PRESCALER1 (0x0A) Pre-scaler 1 config register
MSB LSB
Content - - - - - - - - 7:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 7:0 : val - PWM pre-scaler reload config register
period = val+1 [PWM module frequency cycles]
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
107 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.12-8: Register PRESCALER2 (0x0C) Pre-scaler 2 config register
MSB LSB
Content - - - - - - - - 7:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 7:0 : val - PWM pre-scaler reload config register
period = val+1 [PWM module frequency cycles]
Table 4.4.6.12-9: Register PRESCALER3 (0x0E) Pre-scaler 3 config register
MSB LSB
Content - - - - - - - - 7:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 7:0 : val - PWM pre-scaler reload config register
period = val+1 [PWM module frequency cycles]
Table 4.4.6.12-10: Register PERIOD0 (0x10) Channel 0 period config register
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : val - channel 0 period reload value config
PWM period = val [pre-scaled cycles]
Note: minimum val = 4
Table 4.4.6.12-11: Register START0 (0x12) Channel 0 pulse start config
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : val - channel 0 start timestamp config
timestamp = val [pre-scaled cycles]
Table 4.4.6.12-12: Register STOP0 (0x14) Channel 0 pulse stop config
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : val - channel 0 stop timestamp config
timestamp = val [pre-scaled cycles]
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
108 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.12-13: Register COUNTER0 (0x16) Channel 0 current counter value
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R R R
Bit Description 15:0 : val - current PWM period counter value
Table 4.4.6.12-14: Register PERIOD1 (0x18) Channel 1 period config register
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : val - channel 1 period reload value config
PWM period = val [pre-scaled cycles]
Note: minimum val = 4
Table 4.4.6.12-15: Register START1 (0x1A) Channel 1 pulse start config
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : val - channel 1 start timestamp config
timestamp = val [pre-scaled cycles]
Table 4.4.6.12-16: Register STOP1 (0x1C) Channel 1 pulse stop config
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : val - channel 1 stop timestamp config
timestamp = val [pre-scaled cycles]
Table 4.4.6.12-17: Register COUNTER1 (0x1E) Channel 1 current counter value
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R R R
Bit Description 15:0 : val - current PWM period counter value
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
109 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.12-18: Register PERIOD2 (0x20) Channel 2 period config register
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : val - channel 2 period reload value config
PWM period = val [pre-scaled cycles]
Note: minimum val = 4
Table 4.4.6.12-19: Register START2 (0x22) Channel 2 pulse start config
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : val - channel 2 start timestamp config
timestamp = val [pre-scaled cycles]
Table 4.4.6.12-20: Register STOP2 (0x24) Channel 2 pulse stop config
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : val - channel 2 stop timestamp config
timestamp = val [pre-scaled cycles]
Table 4.4.6.12-21: Register COUNTER2 (0x26) Channel 2 current counter value
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R R R
Bit Description 15:0 : val - current PWM period counter value
Table 4.4.6.12-22: Register PERIOD3 (0x28) Channel 3 period config register
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : val - channel 2 period reload value config
PWM period = val [pre-scaled cycles]
Note: minimum val = 4
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
110 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.12-23: Register START3 (0x2A) Channel 3 pulse start config
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : val - channel 2 start timestamp config
timestamp = val [pre-scaled cycles]
Table 4.4.6.12-24: Register STOP3 (0x2C) Channel 3 pulse stop config
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : val - channel 2 stop timestamp config
timestamp = val [pre-scaled cycles]
Table 4.4.6.12-25: Register COUNTER3 (0x2E) Channel 3 current counter value
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R R R
Bit Description 15:0 : val - current PWM period counter value
Table 4.4.6.12-26: Register IRQ_STATUS (0x30) IRQ status register
MSB LSB
Content - - - - 11 10 9 8 7 6 5 4 3 2 1 0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 11 : evt_stop3 (event) - channel 3 pulse stop event
10 : evt_start3 (event) - channel 3 pulse start event
9 : evt_period3 (event) - channel 3 period reload event
8 : evt_stop2 (event) - channel 2 pulse stop event
7 : evt_start2 (event) - channel 2 pulse start event
6 : evt_period2 (event) - channel 2 period reload event
5 : evt_stop1 (event) - channel 1 pulse stop event
4 : evt_start1 (event) - channel 1 pulse start event
3 : evt_period1 (event) - channel 1 period reload event
2 : evt_stop0 (event) - channel 0 pulse stop event
1 : evt_start0 (event) - channel 0 pulse start event
0 : evt_period0 (event) - channel 0 period reload event
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
111 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.12-27: Register IRQ_MASK (0x34) IRQ mask register
MSB LSB
Content - - - - 11:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 11:0 : mask - enable IRQ source
1: enabled
0: disabled
Table 4.4.6.12-28: Register IRQ_VENABLE (0x38) IRQ vector enable register
MSB LSB
Content - - - - - - - - - - - - 3:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R W W W W
Bit Description 3:0 : vno - vector number of interrupt to enable
Table 4.4.6.12-29: Register IRQ_VDISABLE (0x3A) IRQ vector disable register
MSB LSB
Content - - - - - - - - - - - - 3:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R W W W W
Bit Description 3:0 : vno - vector number of interrupt to disable
Table 4.4.6.12-30: Register IRQ_VMAX (0x3C) IRQ max vector register
MSB LSB
Content - - - - - - - - - - - - 3:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 1 1 0 0
Access R R R R R R R R R R R R R/W R/W R/W R/W
Bit Description 3:0 : vmax - needed for nested interrupt support
software writes current vector number to this register, so only interrupts with higher priority (lower
vector number) can nest
Table 4.4.6.12-31: Register IRQ_VNO (0x3E) IRQ vector number register
MSB LSB
Content - - - - - - - - - - - - 3:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 1 1 0 0
Access R R R R R R R R R R R R R/W R/W R/W R/W
Bit Description 3:0 : vno -
read: vector number of enabled pending interrupt with highest priority (smallest vector number).
when no IRQ is pending the first unused IRQ number is returned.
write: vector number of interrupt event to clear
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
112 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
4.4.6.13 OTP Control Module (OTP_CTRL)
This module can be used to configure OTP read access. OTP programming can also be done using these module
registers.
Features:
• Read mode and read speed configuration
• OTP programming configuration
• OTP programming state machine control
Note: The READ_CONFIG and PROG_CONFIG registers can only be written once. A write access protects their
contents. Usually they will be set during boot procedure.
OTP program sequence:
• set PROG_CONTROL.otp_prog = 1
• for all data
• set WDATA0 and/or WDATA1 registers with data to be programmed
• set WADDR which starts word programming
• poll PROG_STATUS.busy until ready
• evaluate PROG_STATUS error flags
• set PROG_CONTROL.otp_prog = 0
• check programmed content (for instance by CRC check sum calculation)
OTP bit soak status
• bit soak status may be evaluated during word programming by polling BIT_SOAK_STATUS register and evalu-
ation of soak counts
Table 4.4.6.13-1: Registers
Register Name Address Description
READ_CONFIG 0x00 Read config register
PROG_CONFIG 0x02 Program config register
PROG_CONTROL 0x06 Program flow control register
WDATA0 0x08 OTP write data [15:0] register
WDATA1 0x0A OTP write data [31:16] register
WADDR 0x10 OTP write address register
PROG_STATUS 0x14 OTP program status register
BIT_SOAK_STATU 0x16 OTP bit soak status register
S
PROTECT 0x18 Protection config register
BOOT_PROTECT 0x1A boot protection register
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
113 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.13-2: Register READ_CONFIG (0x00) Read config register
MSB LSB
Content - - - - - - - - - - - - 3:2 1 0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0
Access R R R R R R R R R R R R R/W R/W R/W R/W
Bit Description 3:2 : trp_config - tRP timing configuration
configures number of 48MHz clock cycles to fulfill tRP
tRP cycles = 2 * trp_config + 3
0 : tRP = 3 cycles = 3 * 20.8ns = 62.5ns (differential read mode / redundant read mode)
1 : tRP = 5 cycles = 5 * 20.8ns = 104.2ns (single ended read mode)
2 : tRP = 145.6ns
3 : tRP = 187.2ns
1 : redundant - redundant read mode selected
0 : differential - differential read mode selected
Table 4.4.6.13-3: Register PROG_CONFIG (0x02) Program config register
MSB LSB
Content - - - - - - - - - 6:4 3:0
Reset value 0 0 0 0 0 0 0 0 0 1 0 0 1 0 1 0
Access R R R R R R R R R R/W R/W R/W R/W R/W R/W R/W
Bit Description 6:4 : trp_config - 48MHz tRP cycles (= trp_config + 1) during verify read
4 : tRP cycles = 4 + 1 = 5 cycles = 5 * 20.8ns = 104.2ns
3:0 : max_soak - maximum number of soak pulses to do
For details please see OTP IP programming document.
Table 4.4.6.13-4: Register PROG_CONTROL (0x06) Program flow control register
MSB LSB
Content 15:8 - - - - - - - 0
Reset value 1 0 0 1 0 1 1 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R R R R R R R R/W
Bit Description 15:8 : pass - password
must be written as 0xA5
will always be read as 0x96
0 : otp_prog -
0 : OTP in read mode
1 : set OTP to programming mode
Note: Consider stable supply voltage conditions during OTP-programming
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
114 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.13-5: Register WDATA0 (0x08) OTP write data [15:0] register
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : data - OTP write data bits [15:0]
Note: If WDATA0 register is not written since last WADDR write, it's content will be cleared to 0
at WADDR write and it will not be used in the programming process. This makes possible to write
a 16 bit word in case of an already written 16 bit word at the other address of the corresponding
32 bit word.
Table 4.4.6.13-6: Register WDATA1 (0x0A) OTP write data [31:16] register
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : data - OTP write data bits [31:16]
Note: If WDATA1 register is not written since last WADDR write, it's content will be cleared to 0
at WADDR write and it will not be used in the programming process. This makes possible to write
a 16 bit word in case of an already written 16 bit word at the other address of the corresponding
32 bit word.
Table 4.4.6.13-7: Register WADDR (0x10) OTP write address register
MSB LSB
Content 15:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:0 : addr - write address
Note: addr bits 1 and 0 will be ignored.
Note: addr write starts 32 bit word program process !
Table 4.4.6.13-8: Register PROG_STATUS (0x14) OTP program status register
MSB LSB
Content - - - - - - - - - 6 5 4 3:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R R R
Bit Description 6 : fail1 - 1 : programming failed (expected a bit as 1, but read a bit as 0)
=> at least one 1-bit could not be set to 1
5 : fail0 - 1 : programing failed (expected a bit as 0, but read a bit as 1)
=> at least one 0-bit was set to 1
4 : busy - 1 : programming is ongoing
3:0 : last_soak - number of soak pulses during last word programming
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
115 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.13-9: Register BIT_SOAK_STATUS (0x16) OTP bit soak status register
MSB LSB
Content - - - - - - - - - - 5 4:0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R R R
Bit Description 5 : take - 1 : increment soak count of bit "soak_bit" by 1 (program software has to evaluate this for
getting soak count information)
Note: "take" will be cleared to 0 at register read
4:0 : soak_bit - actual soaked bit number
Table 4.4.6.13-10: Register PROTECT (0x18) Protection config register
MSB LSB
Content 15:8 7:0
Reset value 1 0 0 1 0 1 1 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:8 : pass - password
must be written as 0xA5
will always be read as 0x96
7:0 : protect - OTP protection
1 : area protected
0 : area writable
OTP single ended read mode:
bit 0 : IP address offset 0x8000 .. 0x8FFF
bit 1 : IP address offset 0x9000 .. 0x9FFF
bit 2 : IP address offset 0xA000 .. 0xAFFF
bit 3 : IP address offset 0xB000 .. 0xBFFF
bit 4 : IP address offset 0xC000 .. 0xCFFF
bit 5 : IP address offset 0xD000 .. 0xDFFF
bit 6 : IP address offset 0xE000 .. 0xEFFF
bit 7 : IP address offset 0xF000 .. 0xFFFF
OTP redundant or differential read mode:
bit 0 : IP address offset 0xC000 .. 0xC7FF
bit 1 : IP address offset 0xC800 .. 0xCFFF
bit 2 : IP address offset 0xD000 .. 0xD7FF
bit 3 : IP address offset 0xD800 .. 0xDFFF
bit 4 : IP address offset 0xE000 .. 0xE7FF
bit 5 : IP address offset 0xE800 .. 0xEFFF
bit 6 : IP address offset 0xF000 .. 0xF7FF
bit 7 : IP address offset 0xF800 .. 0xFFFF
Note: protect bits can only be set. Once set they cannot be cleared again.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
116 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.13-11: Register BOOT_PROTECT (0x1A) boot protection register
MSB LSB
Content 15:8 - - - - - 2:0
Reset value 1 0 0 1 0 1 1 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R R R R R R/W R/W R/W
Bit Description 15:8 : pass - password
must be written as 0xA5
will always be read as 0x96
2:0 : protect - fine granular OTP boot area protection, starting at lowest OTP address
0 : no protection
1 : 128 byte (0x0080)
2 : 256 byte (0x0100)
3 : 384 byte (0x0180)
4 : 512 byte (0x0200)
5 : 1024 byte (0x0400)
6 : 1536 byte (0x0600)
7 : 2048 byte (0x0800)
Note: Once written, this register cannot be changed anymore. This register will usually be initial-
ized during boot process (device calibration).
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
117 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
4.4.6.14 EEPROM Control Module (EEPROM_CTRL)
This module can be used to erase and program the EEPROM memory.
Features:
• EEPROM memory erase and write access is protected by a special handling sequence
• To erase or write access the EEPROM this sequence has to be used by software
• This sequence is necessary to lower the risk of accidental EEPROM erase or write
• 1. Increment lock counter 9 times => lock_counter == 9
• 2. Configure LOCK_L/LOCK_U register(s) if needed
• LOCK_L/LOCK_U bits can only be configured when lock_counter == 9
• 3. Increment lock counter 2 times => lock_counter == 11
• 4. Configure LOCK_U_FREEZE register if needed
• LOCK_L_FREEZE/LOCK_U_FREEZE bits can only be configured when lock_counter == 11
• 5. Increment lock counter => lock_counter == 12
• 6. Set needed MODE bits
• MODE bits can only be configured when lock_counter == 12
• 7. Increment lock counter => lock_counter == 13
• 8. Write data to memory area OR do erase mode dummy write to memory area
• 9. Read STATUS until STATUS.busy == 0
• When writing LOCK_CNT with 0 value, MODE, LOCK_CNT (lock_counter) and LOCK_L/LOCK_U will be reset
to their default or frozen state
Note: Erased data words should be programmed before they are erased again. Violating this constraint will result in
unnecessary bit-cell stress.
Table 4.4.6.14-1: Registers
Register Name Address Description
MODE 0x00 Mode register
STATUS 0x02 Status register
LOCK_L 0x04 Lock (lower) config register
LOCK_U 0x06 Lock (upper) config register
LOCK_CNT 0x0A Lock counter register
LOCK_L_FREEZE 0x0C Lock (lower) freeze register
LOCK_U_FREEZE 0x0E Lock (upper) freeze register
IP_ENABLE 0x10 IP enable register
IRQ_STATUS 0x30 IRQ status register
IRQ_MASK 0x34 IRQ mask register
IRQ_VENABLE 0x38 IRQ vector enable register
IRQ_VDISABLE 0x3A IRQ vector disable register
IRQ_VMAX 0x3C IRQ max vector register
IRQ_VNO 0x3E IRQ vector number register
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
118 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.14-2: Register MODE (0x00) Mode register
MSB LSB
Content 15:8 - - - - - - 1 0
Reset value 1 0 0 1 0 1 1 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R R R R R R R/W R/W
Bit Description 15:8 : pass - password
must be written as 0xA5
will always be read as 0x96
1 : program - program mode select
Note: single 16 bit word program
0 : erase - erase mode select
Note: double 16 bit word erase
Table 4.4.6.14-3: Register STATUS (0x02) Status register
MSB LSB
Content - - - - - - - - - - - - - - - 0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R R R
Bit Description 0 : busy -
0 : Ready for erase, program or read operation.
1 : IP is busy. No erase, program or read operation is allowed.
The status is self timed and depends on the IP and may vary between devices and over voltage,
temperature and time.
To be sure that a started erase or program operation has been finished poll STATUS.busy until
it's 0.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
119 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.14-4: Register LOCK_L (0x04) Lock (lower) config register
MSB LSB
Content 15:8 7:0
Reset value 1 0 0 1 0 1 1 0 1 1 1 1 1 1 1 1
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:8 : pass - password
must be written as 0xA5
will always be read as 0x96
7:0 : lock - memory protection (lower half of IP memory range)
1 : area protected
0 : area writeable / erasable
bit 0 : IP address offset 0x00 .. 0x0E
bit 1 : IP address offset 0x10 .. 0x1E
bit 2 : IP address offset 0x20 .. 0x2E
bit 3 : IP address offset 0x30 .. 0x3E
bit 4 : IP address offset 0x40 .. 0x4E
bit 5 : IP address offset 0x50 .. 0x5E
bit 6 : IP address offset 0x60 .. 0x6E
bit 7 : IP address offset 0x70 .. 0x7E
Note: Lock bits can only be changed (set or cleared) when related LOCK_FREEZE bit is 0.
Table 4.4.6.14-5: Register LOCK_U (0x06) Lock (upper) config register
MSB LSB
Content 15:8 - - - - - - 1:0
Reset value 1 0 0 1 0 1 1 0 0 0 0 0 0 0 1 1
Access R/W R/W R/W R/W R/W R/W R/W R/W R R R R R R R/W R/W
Bit Description 15:8 : pass - password
must be written as 0xA5
will always be read as 0x96
1:0 : lock - memory protection (upper half of IP memory range)
1 : area protected
0 : area writeable / erasable
bit 0 : IP address offset 0x80 .. 0x8E
bit 1 : IP address offset 0x90 .. 0x9E
Note: Lock bits can only be changed (set or cleared) when related LOCK_FREEZE bit is 0.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
120 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.14-6: Register LOCK_CNT (0x0A) Lock counter register
MSB LSB
Content 15:8 - - - - 3:0
Reset value 1 0 0 1 0 1 1 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R R R R R/W R/W R/W R/W
Bit Description 15:8 : pass - password
must be written as 0xA5
will always be read as 0x96
3:0 : lock_counter -
write : writing 0xA increments lock_counter
read : returns current lock counter value
Table 4.4.6.14-7: Register LOCK_L_FREEZE (0x0C) Lock (lower) freeze register
MSB LSB
Content 15:8 7:0
Reset value 1 0 0 1 0 1 1 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W R/W
Bit Description 15:8 : pass - password
must be written as 0xA5
will always be read as 0x96
7:0 : freeze - memory protection freeze (lower half of IP memory range)
1 : area protection frozen
0 : area protection changeable
bit 0 : IP address offset 0x00 .. 0x0E
bit 1 : IP address offset 0x10 .. 0x1E
bit 2 : IP address offset 0x20 .. 0x2E
bit 3 : IP address offset 0x30 .. 0x3E
bit 4 : IP address offset 0x40 .. 0x4E
bit 5 : IP address offset 0x50 .. 0x5E
bit 6 : IP address offset 0x60 .. 0x6E
bit 7 : IP address offset 0x70 .. 0x7E
Note: Freeze bits can only be set. Once set they cannot be cleared again.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
121 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.14-8: Register LOCK_U_FREEZE (0x0E) Lock (upper) freeze register
MSB LSB
Content 15:8 - - - - - - 1:0
Reset value 1 0 0 1 0 1 1 0 0 0 0 0 0 0 0 0
Access R/W R/W R/W R/W R/W R/W R/W R/W R R R R R R R/W R/W
Bit Description 15:8 : pass - password
must be written as 0xA5
will always be read as 0x96
1:0 : freeze - memory protection freeze (upper half of IP memory range)
1 : area protection frozen
0 : area protection changeable
bit 0 : IP address offset 0x80 .. 0x8E
bit 1 : IP address offset 0x90 .. 0x9E
Note: Freeze bits can only be set. Once set they cannot be cleared again.
Table 4.4.6.14-9: Register IP_ENABLE (0x10) IP enable register
MSB LSB
Content 15:8 - - - - - - - 0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1
Access R/W R/W R/W R/W R/W R/W R/W R/W R R R R R R R R/W
Bit Description 15:8 : password - must be written as 0xA5, will always be read as 0x96
0 : enable - EEPROM enable
0 : OFF
1 : ON
Table 4.4.6.14-10: Register IRQ_STATUS (0x30) IRQ status register
MSB LSB
Content - - - - - - - - - - - - - 2 1 0
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R R R
Bit Description 2 : ip_off_access (event) - EEPROM memory access during IP_ENABLE.enable OFF state
1 : invalid_addr (event) - invalid address event (access outside of valid EEPROM memory range)
0 : timeout (event) - EEPROM IP ran into time out
Table 4.4.6.14-11: Register IRQ_MASK (0x34) IRQ mask register
MSB LSB
Content - - - - - - - - - - - - - 2:0 - -
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R/W R/W R/W
Bit Description 2:0 : mask - enable irq source
1: enabled
0: disabled
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
122 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 4.4.6.14-12: Register IRQ_VENABLE (0x38) IRQ vector enable register
MSB LSB
Content - - - - - - - - - - - - - - 1:0 -
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R W W
Bit Description 1:0 : vno - vector number of interrupt to enable
Table 4.4.6.14-13: Register IRQ_VDISABLE (0x3A) IRQ vector disable register
MSB LSB
Content - - - - - - - - - - - - - - 1:0 -
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Access R R R R R R R R R R R R R R W W
Bit Description 1:0 : vno - vector number of interrupt to disable
Table 4.4.6.14-14: Register IRQ_VMAX (0x3C) IRQ max vector register
MSB LSB
Content - - - - - - - - - - - - - - 1:0 -
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1
Access R R R R R R R R R R R R R R R/W R/W
Bit Description 1:0 : vmax - needed for nested interrupt support software writes current vector number to this
register, so only interrupts with higher priority (lower vector number) can nest
Table 4.4.6.14-15: Register IRQ_VNO (0x3E) IRQ vector number register
MSB LSB
Content - - - - - - - - - - - - - - 1:0 -
Reset value 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1
Access R R R R R R R R R R R R R R R/W R/W
Bit Description 1:0 : vno -
read: vector number of enabled pending interrupt with highest priority (smallest vector number).
when no IRQ is pending the first unused IRQ number is returned.
write: vector number of interrupt event to clear
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
123 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
5 ESD, Latch Up and EMC
5.1 Electro Static Discharge (ESD)
Table 5.1-1: ESD on IC Level, Human Body Model (HBM)
Standard AEC-Q100-002
Model Human Body Model (HBM)
Capacitance 100pF
Resistance 1,5kΩ
Minimum withstand Voltage 8kV for LIN to system ground
Minimum withstand Voltage 4kV for VS to system ground
Minimum withstand Voltage 2kV for all other pins
Pulse rise time (10%-90%) < 10ns
Test point pin to supply
Number of pulses 1 of each polarity
Table 5.1-2: ESD Test on IC Level, Machine model (MM)
Standard AEC-Q100-003
Model Machine Model (MM)
Test point Pin to system ground
Capacitance 200pF
Resistance 0kΩ
Minimum withstand Voltage 200V for all pins to system ground
Table 5.1-3: ESD on IC Level, Charged Device Model (CDM)
Standard AEC-Q100-011
Model Charged Device Model (CDM)
Resistance 1Ω
Minimum withstand Voltage 750V for edge pins
500V for all other pins
Pulse rise time (10%-90%) < 400ps
Table 5.1-4: Optional ESD Test on IC Level for Special Pins
Optional ESD Test Test equipment similar IEC 61000-4-2
Capacitance 150pF
Resistance 330Ω
Minimum withstand Voltage 8kV
(According to document "OEM hardware requirements for LIN, CAN and FlexRay
Interfaces", version 1.3)
5.2 Latch-up
Latch-up performance is validated according JEDEC standard JESD 78D.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
124 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
5.3 EMC
The device fulfils the OEM EMC requirements specified in the "Hardware Requirements for LIN, CAN and FlexRay
Interfaces in Automotive Applications", V1.3, dated 04.05.2012
5.4 Pulses according ISO-7637
The E521.36 passes tests according to ISO7637-2 Pulse 2a 75V with an external 2.2µF X7R capacitor at pin VS.
(Conditions: VS=13.5V, T=25°C)
The device passed tests with the following capacitor: Kemet C1206C225K5RACTU
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
125 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
6 Package Reference
The E521.36 is available in a Pb free, RoHs compliant, SO8ep plastic package according to JEDEC MS-012-F,
variant BA. The package is classified to Moisture Sensitivity Level 3 (MSL 3) according to JEDEC J-STD-020C with
a soldering peak temperature of 260°C.
Note: Thermal resistance junction to ambient Rth,ja is typ. 45 K/W, based on JEDEC standard JESD-51-2, JESD-51-
5 and JESD-51-7.
Figure 6-1: Package Outline
Note: Contact factory for specific location and type of pin 1 identification.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
126 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
Table 6-1: Package Characteristics
Description Symbol mm inch
min typ max min typ max
Package height A -- -- 1.70 -- -- 0.067
Stand off A1 0.00 -- 0.15 0.000 -- 0.006
Package body thickness A2 1.25 -- -- 0.049 -- --
Width of terminal leads, inclusive b 0.31 -- 0.51 0.012 -- 0.020
lead finish
Thickness of terminal leads, includ- c 0.10 -- 0.25 0.004 -- 0.010
ing lead finish
Package length D 4.900 BSC 0.193 BSC
Package width E 6.000 BSC 0.236 BSC
Package body width E1 3.900 BSC 0.154 BSC
Length of exposed pad D1 3.300 BSC 0.130 BSC
Width of exposed pad E2 2.540 BSC 0.100 BSC
Lead pitch e 1.270 BSC 0.050 BSC
Length of terminal for soldering to L 0.4 -- 1.27 0.016 -- 0.050
substrate
Body chamfer (45°) h 0.25 -- 0.50 0.010 -- 0.020
Angle of lead mounting area phi [°] 0 -- 8 0 -- 8
Mold release angle phi1 [°] 5 -- 15 5 -- 15
Number of terminal positions N 8 8
Values in mm are valid, values in inch contain rounding errors
6.1 Device Marking
6.1.1 Top Side
E52136B
XXXXC
YWWR@
Table 6.1.1-1: Top Side
where
Signature Explanation
E52136B Elmos project number
XXXX Production lot number
C Assembler code
YWW Year and week of assembly
R Mask revision code
@ Elmos internal code
Table 6.1.1-2: Marking of the Devices
6.1.2 Bottom Side
No marking.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
127 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
7 General
7.1 WARNING - Life Support Applications Policy
Elmos Semiconductor AG is continually working to improve the quality and reliability of its products. Nevertheless,
semiconductor devices in general can malfunction or fail due to their inherent electrical sensitivity and vulnerability
to physical stress. It is the responsibility of the buyer, when utilizing Elmos Semiconductor AG products, to observe
standards of safety, and to avoid situations in which malfunction or failure of an Elmos Semiconductor AG Product
could cause loss of human life, body injury or damage to property. In development your designs, please ensure that
Elmos Semiconductor AG products are used within specified operating ranges as set forth in the most recent
product specifications.
7.2 General Disclaimer
Information furnished by Elmos Semiconductor AG is believed to be accurate and reliable. However, no responsib-
ility is assumed by Elmos Semiconductor AG for its use, nor for any infringements of patents or other rights of third
parties, which may result from its use. No license is granted by implication or otherwise under any patent or patent
rights of Elmos Semiconductor AG. Elmos Semiconductor AG reserves the right to make changes to this document
or the products contained therein without prior notice, to improve performance, reliability, or manufacturability .
7.3 Application Disclaimer
Circuit diagrams may contain components not manufactured by Elmos Semiconductor AG, which are included as
means of illustrating typical applications. Consequently, complete information sufficient for construction purposes is
not necessarily given. The information in the application examples has been carefully checked and is believed to be
entirely reliable. However, no responsibility is assumed for inaccuracies. Furthermore, such information does not
convey to the purchaser of the semiconductor devices described any license under the patent rights of Elmos
Semiconductor AG or others.
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
128 / 129
RGB LIN Controller with Current Source E521.36
PRODUCTION DATA – May 23, 2017
8 Contact Info
Table 8-1: Contact Information
Headquarters Phone: +49 (0) 231 / 75 49-100
ELMOS Semiconductor AG Fax: +49 (0) 231 / 75 49-149
Heinrich-Hertz-Str. 1, sales-germany@elmos.com
D-44227 Dortmund (Germany)
www.elmos.com
Sales and Application Support Office North America Phone: +1 (0) 248 / 8 65 32 00
ELMOS NA. Inc. Fax: +1 (0) 248 / 8 65 32 03
32255 Northwestern Highway, Suite 220 sales-usa@elmos.com
Farmington Hills, MI 48334 (USA)
Sales and Application Support Office Korea and Japan Phone: +82 (0) 31 / 7 14 11 31
ELMOS Korea sales-korea@elmos.com
B-1007, U-Space 2, #670 Daewangpangyo-ro, Sampyoung-dong,
Bunddang-gu, Sungnam-si Kyounggi-do
463-400 Republic of Korea
Sales and Application Support Office China Phone: +86 (0) 21 / 51 78 51 88
Elmos Semiconductor Technology (Shanghai) Co., Ltd. Fax: +86 (0) 21 / 51 78 52 05
Unit London, 1BF GC Tower, No. 1088 Yuan Shen Road, sales-china@elmos.com
Pudong New District, Shanghai, 200122, P.R. China
Sales and Application Support Office Singapore Phone: +65 (0) 690 / 8 12 61
ELMOS Semiconductor Singapore Pte Ltd. Fax: +65 (0) 6570 / 5906
3A International Business Park, sales-singapore@elmos.com
#09-13 ICON@IBP, Singapore 609935
ELMOS Semiconductor AG reserves the right to change the detail specifications as may be required to permit improvements in the design of its products.
Elmos Semiconductor AG Data Sheet QM-Nr.: 25DS0160E.02
129 / 129
You might also like
- Case Studies On Cryptography and SecurityDocument26 pagesCase Studies On Cryptography and Securitynooti45% (11)
- Banner To Micrologix PDFDocument19 pagesBanner To Micrologix PDFJosue PeñaNo ratings yet
- Pow Powertrain Products PDF enDocument67 pagesPow Powertrain Products PDF enJesse DavisNo ratings yet
- HP Tuners Instructions PDFDocument2 pagesHP Tuners Instructions PDFabdulmajid aljonadiNo ratings yet
- SSD Work BookDocument176 pagesSSD Work BooktinashemambarizaNo ratings yet
- DBC Format 2007Document17 pagesDBC Format 2007thoroftedal100% (1)
- Micro Auto Box FeaturesDocument532 pagesMicro Auto Box FeaturesSharath BhavanasiNo ratings yet
- 1316874B EN VW Amarok 2010 D TT-EvoDocument30 pages1316874B EN VW Amarok 2010 D TT-EvoSindreNo ratings yet
- ChargerDocument2 pagesChargerAafaqueQureshiNo ratings yet
- A Comprehensible Guide To j1939Document30 pagesA Comprehensible Guide To j1939Ahmed Abdelghany100% (1)
- Driver Motor BrushlesDocument48 pagesDriver Motor BrushlesGONAJ2008No ratings yet
- Converter DC To DCDocument13 pagesConverter DC To DCadyasha acharyaNo ratings yet
- BootLoader Del 78K0-KX2Document60 pagesBootLoader Del 78K0-KX2Anonymous pu1L9ZNo ratings yet
- LIN-Spec Pac2 1 PDFDocument191 pagesLIN-Spec Pac2 1 PDFveereshascribdNo ratings yet
- Redes de Comunicação Can - CanopenDocument34 pagesRedes de Comunicação Can - CanopenRoberto JustinoNo ratings yet
- MOSFET PA - PDF PDFDocument16 pagesMOSFET PA - PDF PDFDoDuyBacNo ratings yet
- Autosar Practical ApplicationDocument135 pagesAutosar Practical ApplicationohmprakashNo ratings yet
- CANape ProductInformation enDocument25 pagesCANape ProductInformation enPaulo CesarNo ratings yet
- Electronic Ignition (EI) SystemsDocument22 pagesElectronic Ignition (EI) SystemsJason MaldonadoNo ratings yet
- Draft Copy - MSP430 Book PDFDocument231 pagesDraft Copy - MSP430 Book PDFRaveena ChantiyalNo ratings yet
- Manual: Tricore Debugger and TraceDocument139 pagesManual: Tricore Debugger and TraceAakash DeepNo ratings yet
- Implementing A Bootloader For The PIC16F87X: OperationDocument24 pagesImplementing A Bootloader For The PIC16F87X: Operationboslim1580100% (1)
- LIN ProtocolDocument24 pagesLIN ProtocolChandu Sai100% (1)
- Improving The Beginner's PIDDocument63 pagesImproving The Beginner's PIDNedim Avicena AlićNo ratings yet
- Linear Battery Charger Brochure 2016Document48 pagesLinear Battery Charger Brochure 2016CaniNo ratings yet
- APT1405.A2.01E.V1.0 - 96600 (AE1405 Series) Product Specification - BakDocument5 pagesAPT1405.A2.01E.V1.0 - 96600 (AE1405 Series) Product Specification - BakСергей КаревNo ratings yet
- Crank Wheel Pulser Software PDFDocument3 pagesCrank Wheel Pulser Software PDFDarel DalmassoNo ratings yet
- Esys Flasher User's ManualDocument8 pagesEsys Flasher User's ManualThiago Techscan Henrique TechscanNo ratings yet
- Automotive Electronics Product Information Ignition Driver With Diagnosis - CK200Document5 pagesAutomotive Electronics Product Information Ignition Driver With Diagnosis - CK200ORLANDO HERRERANo ratings yet
- AUTOSAR LayeredSoftwareArchitectureDocument46 pagesAUTOSAR LayeredSoftwareArchitectureGiridharNo ratings yet
- Messenger Development Without Internet Using Zigbee TechnologyDocument89 pagesMessenger Development Without Internet Using Zigbee TechnologyRaghu ReddyNo ratings yet
- Vector XCP Basics enDocument3 pagesVector XCP Basics enthoroftedalNo ratings yet
- 07-006 Voltage Drop TestDocument6 pages07-006 Voltage Drop TestVictor MontesdeocaNo ratings yet
- 1 Electric Injection System - Chery Tiggo T11Document87 pages1 Electric Injection System - Chery Tiggo T11limadacarlosNo ratings yet
- Embedded C ProgrammingDocument49 pagesEmbedded C Programmingmukesh_jangra100% (1)
- VIPT LINFUNK eDocument1 pageVIPT LINFUNK eRosen RusevNo ratings yet
- Automobile Battery Monitoring System Using Arduino Uno R3 Microcontroller BoardDocument14 pagesAutomobile Battery Monitoring System Using Arduino Uno R3 Microcontroller BoardMihai BogdanNo ratings yet
- JULIE CAR EMULATOR User Manual ImmoDocument1 pageJULIE CAR EMULATOR User Manual ImmoJozefNo ratings yet
- Goldenmorning Electronic: Product Name: Rgs15128128Wr000 Product No.: Gme128128-01Document34 pagesGoldenmorning Electronic: Product Name: Rgs15128128Wr000 Product No.: Gme128128-01Scott WilsonNo ratings yet
- Doip Protocol 2011Document6 pagesDoip Protocol 2011valangelofNo ratings yet
- 3 Level InverterDocument63 pages3 Level InverterThirumal ValavanNo ratings yet
- Write The Features of PIC16F8XX Flash Microcontrollers?: Unit-ViDocument6 pagesWrite The Features of PIC16F8XX Flash Microcontrollers?: Unit-ViashokNo ratings yet
- Rogers - Unknown - RO4400 Series BondplyDocument4 pagesRogers - Unknown - RO4400 Series BondplyHadi SaeidiManeshNo ratings yet
- PADS Standard Plus Evaluation Guide PDFDocument214 pagesPADS Standard Plus Evaluation Guide PDFGerson Cruz100% (1)
- MISRA C-Some Key Rules To Make Embedded Systems Safer PDFDocument3 pagesMISRA C-Some Key Rules To Make Embedded Systems Safer PDFLeiser HartbeckNo ratings yet
- Valeo Power ChargerDocument2 pagesValeo Power ChargercristiNo ratings yet
- DC-DC Converters - Buck Converter - 1Document17 pagesDC-DC Converters - Buck Converter - 1Ashraf YusofNo ratings yet
- TargetLink Product-InformationDocument48 pagesTargetLink Product-Informationmazher_ecNo ratings yet
- Kwp2000 and UDS Difference - Automotive BasicsDocument5 pagesKwp2000 and UDS Difference - Automotive Basicstfone1No ratings yet
- A Home Automation Architecture Based On LoRa TechnDocument12 pagesA Home Automation Architecture Based On LoRa TechnDannyNo ratings yet
- CY335 Direct Injection Valve DriverDocument2 pagesCY335 Direct Injection Valve DriverRicardo UrioNo ratings yet
- SDV EbookDocument59 pagesSDV EbookYogan SriNo ratings yet
- 4-14 - p18 - Tips-And-Tricks-For-The-Use-Of-Capl-Part 3 - Lobmeyer - MarktlDocument4 pages4-14 - p18 - Tips-And-Tricks-For-The-Use-Of-Capl-Part 3 - Lobmeyer - MarktlMohammad FaizanNo ratings yet
- AND9218/D 5 Key Steps To Designing A Compact, High Efficiency PFC Stage Using The NCP1602Document19 pagesAND9218/D 5 Key Steps To Designing A Compact, High Efficiency PFC Stage Using The NCP1602Jonatan LunaNo ratings yet
- Introduction To Automotive NetworksDocument48 pagesIntroduction To Automotive NetworksysfplaneNo ratings yet
- Datasheet IC Can BusDocument54 pagesDatasheet IC Can BusJose Oro100% (1)
- Manual MplabDocument240 pagesManual MplabErnesto NetoNo ratings yet
- Controller Area Network: Submitted By:Chandra Shekar.I.G Dept of E&C 1NH02EC010 NhceDocument22 pagesController Area Network: Submitted By:Chandra Shekar.I.G Dept of E&C 1NH02EC010 Nhceapi-3760105100% (2)
- Job Opportunity Bootloader Specialist at Elektrobit Automotive GMBH Jobportal1Document3 pagesJob Opportunity Bootloader Specialist at Elektrobit Automotive GMBH Jobportal1krishaNo ratings yet
- Advanced PointerDocument11 pagesAdvanced PointerStoriesofsuperheroesNo ratings yet
- Hybrid Electric Vehicles: Principles and Applications with Practical PerspectivesFrom EverandHybrid Electric Vehicles: Principles and Applications with Practical PerspectivesNo ratings yet
- E523-81 Elmos DsDocument68 pagesE523-81 Elmos DsЕвгений ИвановNo ratings yet
- Preliminary: DescriptionDocument29 pagesPreliminary: DescriptionNegrea CristianNo ratings yet
- Backhoe 220 To 600 SeriesDocument3 pagesBackhoe 220 To 600 SeriesЕвгений ИвановNo ratings yet
- 1N4728A - 1N4758A: Zener DiodesDocument4 pages1N4728A - 1N4758A: Zener DiodesЕвгений ИвановNo ratings yet
- Horizontal Genlock, 8FSC: FeaturesDocument15 pagesHorizontal Genlock, 8FSC: FeaturesЕвгений ИвановNo ratings yet
- 1EDN7550 and 1EDN8550: Feature ListDocument21 pages1EDN7550 and 1EDN8550: Feature ListЕвгений ИвановNo ratings yet
- Mccsemi: 1N746 A Thru 1N759 ADocument3 pagesMccsemi: 1N746 A Thru 1N759 AЕвгений ИвановNo ratings yet
- Schottky Barrier Diode: Dual Series Schottky Barrier Diode For Mixer and Detector 5V, 30ma, 0.69pF, CPDocument6 pagesSchottky Barrier Diode: Dual Series Schottky Barrier Diode For Mixer and Detector 5V, 30ma, 0.69pF, CPЕвгений ИвановNo ratings yet
- General Operation Instructions: Hydraulic High Pressure Water PumpsDocument14 pagesGeneral Operation Instructions: Hydraulic High Pressure Water PumpsEdwin MorenoNo ratings yet
- 216 Spare Part ListDocument21 pages216 Spare Part ListЕвгений ИвановNo ratings yet
- 1N5817Document3 pages1N5817Gallego OrtizNo ratings yet
- Features: High Speed, Monolithic Pin DriverDocument9 pagesFeatures: High Speed, Monolithic Pin DriverЕвгений ИвановNo ratings yet
- Features: 600Khz/1.2Mhz PWM Step-Up RegulatorDocument12 pagesFeatures: 600Khz/1.2Mhz PWM Step-Up RegulatorЕвгений ИвановNo ratings yet
- EQCO30R5.D 3G/HD-SDI Video Cable EqualizerDocument24 pagesEQCO30R5.D 3G/HD-SDI Video Cable EqualizerЕвгений ИвановNo ratings yet
- 1°C Triple Temperature Sensor With Hotter of Two Zones: Product FeaturesDocument26 pages1°C Triple Temperature Sensor With Hotter of Two Zones: Product FeaturesЕвгений ИвановNo ratings yet
- 1°C Triple Smbus Sensor With Resistance Error Correction: Product FeaturesDocument3 pages1°C Triple Smbus Sensor With Resistance Error Correction: Product FeaturesЕвгений ИвановNo ratings yet
- Ev12aq600 PDSDocument57 pagesEv12aq600 PDSЕвгений ИвановNo ratings yet
- E523-81 Elmos DsDocument68 pagesE523-81 Elmos DsЕвгений ИвановNo ratings yet
- Eemb Battery Specification: Lithium Thionyl Chloride BatteryDocument9 pagesEemb Battery Specification: Lithium Thionyl Chloride BatteryЕвгений ИвановNo ratings yet
- EMC2106Document106 pagesEMC2106Евгений ИвановNo ratings yet
- Features: Monolithic 350ma Step-Down RegulatorDocument10 pagesFeatures: Monolithic 350ma Step-Down RegulatorЕвгений ИвановNo ratings yet
- 40 Volt, 10 Amp Peak, High-Frequency, Integrated Laser Driver DescriptionDocument9 pages40 Volt, 10 Amp Peak, High-Frequency, Integrated Laser Driver DescriptionЕвгений ИвановNo ratings yet
- Multiple RPM-Based PWM Fan Controller For Five Fans: Product FeaturesDocument56 pagesMultiple RPM-Based PWM Fan Controller For Five Fans: Product FeaturesЕвгений ИвановNo ratings yet
- EMC6W201Document5 pagesEMC6W201Евгений ИвановNo ratings yet
- EPC2050 - Enhancement-Mode Power Transistor Preliminary Specification SheetDocument8 pagesEPC2050 - Enhancement-Mode Power Transistor Preliminary Specification SheetЕвгений ИвановNo ratings yet
- Features: Monolithic 2A Step-Down RegulatorDocument9 pagesFeatures: Monolithic 2A Step-Down RegulatorЕвгений ИвановNo ratings yet
- EMC6D102Document86 pagesEMC6D102Евгений ИвановNo ratings yet
- EPC2059 - Enhancement Mode Power Transistor: V, 170 V R, 9 mΩ I, 24 ADocument6 pagesEPC2059 - Enhancement Mode Power Transistor: V, 170 V R, 9 mΩ I, 24 AЕвгений ИвановNo ratings yet
- Features: Monolithic 4A DC/DC Step-Down RegulatorDocument14 pagesFeatures: Monolithic 4A DC/DC Step-Down RegulatorЕвгений ИвановNo ratings yet
- Features: Monolithic 600ma Step-Down Regulator With Low Quiescent CurrentDocument11 pagesFeatures: Monolithic 600ma Step-Down Regulator With Low Quiescent CurrentЕвгений ИвановNo ratings yet
- Monolithic Amplifier: Dc-4 GHZDocument21 pagesMonolithic Amplifier: Dc-4 GHZЕвгений ИвановNo ratings yet
- EQCO31R20Document34 pagesEQCO31R20Евгений ИвановNo ratings yet
- Worship Essential - Video ProjectionDocument18 pagesWorship Essential - Video ProjectionJouberto HeringerNo ratings yet
- Analog Challenge of Nanometer CMOSDocument8 pagesAnalog Challenge of Nanometer CMOSurpublicNo ratings yet
- Asdaf Kabupaten Mimika, Provinsi Papua Program Studi Kependudukan Dan Pencatatan SipilDocument15 pagesAsdaf Kabupaten Mimika, Provinsi Papua Program Studi Kependudukan Dan Pencatatan SipilretnoayuNo ratings yet
- Mutasi Bca Saka Februari 2021Document9 pagesMutasi Bca Saka Februari 2021Dian ManikNo ratings yet
- Voxengo Boogex User Guide enDocument6 pagesVoxengo Boogex User Guide enjabba_70No ratings yet
- Magnetom C!: MR039/05/P Update Instructions MRDocument6 pagesMagnetom C!: MR039/05/P Update Instructions MRjcleonbNo ratings yet
- A First Step Towards Understanding Popularity in Youtube: Gloria Chatzopoulou, Cheng Sheng, Michalis FaloutsosDocument6 pagesA First Step Towards Understanding Popularity in Youtube: Gloria Chatzopoulou, Cheng Sheng, Michalis Faloutsosbeepee14No ratings yet
- Teradek Bolt 300 User ManualDocument2 pagesTeradek Bolt 300 User ManualElectra/Off TraxNo ratings yet
- Focus 4K Embedded NVRs-HEN64304Document4 pagesFocus 4K Embedded NVRs-HEN64304Mukesh BariaNo ratings yet
- Micom P54X Series: Current Differential Protection With Optional Subcycle DistanceDocument8 pagesMicom P54X Series: Current Differential Protection With Optional Subcycle DistanceHung Cuong PhamNo ratings yet
- BL-1300 Um 374GB GB WW 1123-1Document308 pagesBL-1300 Um 374GB GB WW 1123-1Ramon Cavaco0% (1)
- Radon TransformDocument4 pagesRadon TransformadobiNo ratings yet
- 64K 5.0V I C Smart Serial Eeprom: FeaturesDocument16 pages64K 5.0V I C Smart Serial Eeprom: FeaturesFerner BriceñoNo ratings yet
- F-050 Impressed Current SystemDocument80 pagesF-050 Impressed Current SystemВасиль Гудзь100% (1)
- Simple Cost Effective Darlington Amplifier - Consort3's BlogDocument7 pagesSimple Cost Effective Darlington Amplifier - Consort3's BlogK. RAJA SEKARNo ratings yet
- Efficia QuickCard CM10 CM12Document2 pagesEfficia QuickCard CM10 CM12Vincent MicallefNo ratings yet
- MATLAB in Model-Base Design For Slip Energy Recovery of Induction MotorDocument6 pagesMATLAB in Model-Base Design For Slip Energy Recovery of Induction Motorsanjay kumar yadavNo ratings yet
- SOP - TWM - Asset Management - v1Document12 pagesSOP - TWM - Asset Management - v1Abdul HafizNo ratings yet
- Printing Text File in CDocument5 pagesPrinting Text File in CPhuong LeNo ratings yet
- HdfcLogs 20 June 23Document17 pagesHdfcLogs 20 June 23kutta1098mNo ratings yet
- Employee Offboarding Checklist Template CurrentwareDocument8 pagesEmployee Offboarding Checklist Template CurrentwareChandra RaoNo ratings yet
- Catalogue - Film Shrink Tester RSY-R2Document1 pageCatalogue - Film Shrink Tester RSY-R2AamirMalikNo ratings yet
- Theory of Computation - Context Free LanguagesDocument25 pagesTheory of Computation - Context Free LanguagesBhabatosh SinhaNo ratings yet
- Possible Practice Set AcnDocument2 pagesPossible Practice Set Acnnaresh ChoudharyNo ratings yet
- Daylight Factor: Prasented byDocument8 pagesDaylight Factor: Prasented byDebayan dasNo ratings yet
- Health Smart Modernization ProgrammeDocument12 pagesHealth Smart Modernization ProgrammeEnlighten Writing SolutionNo ratings yet
- 3D Modeling and Virtual Manufacturing of A Machine Component Using CATIA V5 and MASTERCAMDocument2 pages3D Modeling and Virtual Manufacturing of A Machine Component Using CATIA V5 and MASTERCAMHIMANSU SEKHAR BEHERANo ratings yet