You might also like
- Two Marks Questions and Answers on Electrical DrivesDocument30 pagesTwo Marks Questions and Answers on Electrical DrivesKarthik KandellaNo ratings yet
- Power Electronics: Lecture Notes of Power Electronics CourseFrom EverandPower Electronics: Lecture Notes of Power Electronics CourseNo ratings yet
- Lecture-9: Load Equalization and Two Mark QuestionsDocument6 pagesLecture-9: Load Equalization and Two Mark QuestionsTimoNo ratings yet
- SSD 2 Marks With AnswersDocument35 pagesSSD 2 Marks With AnswersVijayakumarNo ratings yet
- Unit I V 2 Mark Question Answer 16 Mark QuestionsDocument23 pagesUnit I V 2 Mark Question Answer 16 Mark QuestionspugazhendiraNo ratings yet
- EE2352 - Solid State DrivesDocument23 pagesEE2352 - Solid State DrivesSidali ChaibNo ratings yet
- EE1351 Solid State DrivesDocument25 pagesEE1351 Solid State DrivesGaurav KumarNo ratings yet
- Department of Mechanical Engineering: Question BankDocument13 pagesDepartment of Mechanical Engineering: Question Bankl8o8r8d8s8i8v8No ratings yet
- Ee6009 PeresDocument89 pagesEe6009 PeresparthibanNo ratings yet
- Panimalar Engineering Collge: Department of Mechanical Engineering Ii Year / Iii SemesterDocument32 pagesPanimalar Engineering Collge: Department of Mechanical Engineering Ii Year / Iii SemestersivaNo ratings yet
- M Group: Electrical Drives and Control - EE 1213Document18 pagesM Group: Electrical Drives and Control - EE 1213scribdm100% (3)
- Rejinpaul App From PlaystoreDocument24 pagesRejinpaul App From Playstorepriya dharshiniNo ratings yet
- Uee Unit 1Document85 pagesUee Unit 1nithish reddyNo ratings yet
- Electric Drive Systems ExplainedDocument178 pagesElectric Drive Systems ExplainedAjay Kavi100% (1)
- Solid State Drives 2 MarksDocument9 pagesSolid State Drives 2 MarksskrtamilNo ratings yet
- MECH - THIRD SEMESTER - 2 MARK AND 13 MARK QUESTION BANK - by LearnEngineering - inDocument204 pagesMECH - THIRD SEMESTER - 2 MARK AND 13 MARK QUESTION BANK - by LearnEngineering - inVishnu VaradhanNo ratings yet
- Solid State Drives 2 Marks and 16Document34 pagesSolid State Drives 2 Marks and 16Dhamu DharanNo ratings yet
- Lecture Notes Utilization of Electrical Engineering (UEE)Document99 pagesLecture Notes Utilization of Electrical Engineering (UEE)educatorNo ratings yet
- Question BankDocument32 pagesQuestion BankBhuvaneshNo ratings yet
- Electrical Machine and DrivesDocument18 pagesElectrical Machine and DrivesNEERAJ27TRIPATHINo ratings yet
- EEE259 ELECTRICAL - DRIVES - AND - CONTROLS QB and AnswerDocument20 pagesEEE259 ELECTRICAL - DRIVES - AND - CONTROLS QB and AnswerMuniyasamyNo ratings yet
- DRIVES NotesDocument44 pagesDRIVES NotesChase GarciaNo ratings yet
- Electrical Drives and Control EE1213Document18 pagesElectrical Drives and Control EE1213ViswanathanBalajiNo ratings yet
- Electric Drives: Types and Factors Governing Motor SelectionDocument18 pagesElectric Drives: Types and Factors Governing Motor SelectionvenkatNo ratings yet
- Uep Unit-IDocument19 pagesUep Unit-IKUMAR SNo ratings yet
- Question Bank: Sai Ram Engineering College, Chennai 600 044 An NBA Accredited & ISO 9001:2015 Certified InstitutionDocument55 pagesQuestion Bank: Sai Ram Engineering College, Chennai 600 044 An NBA Accredited & ISO 9001:2015 Certified InstitutionkalyanNo ratings yet
- Unit 1 EE6801Document73 pagesUnit 1 EE6801Thangam Mahesh100% (1)
- See 1306Document153 pagesSee 1306Mogaka LucasNo ratings yet
- Electrical Drives:: Unit - I Drive CharacteristicsDocument22 pagesElectrical Drives:: Unit - I Drive CharacteristicsJegan8586100% (1)
- Sri Shakthi Institute of Engg and Technology: Two Marks Questions and AnswersDocument12 pagesSri Shakthi Institute of Engg and Technology: Two Marks Questions and AnswersdhivyadevinNo ratings yet
- UEE CH 6 Electrical DrivesDocument23 pagesUEE CH 6 Electrical Drivesmukesh.k.varmaNo ratings yet
- Lecture Notes On Utilization of Electric PDFDocument421 pagesLecture Notes On Utilization of Electric PDFPuneeth PuniNo ratings yet
- Electrical Drives & Control-100 Two Marks With AnswerDocument10 pagesElectrical Drives & Control-100 Two Marks With Answerarivurp86% (7)
- Characteristics of Electric Drives: Subject Name: Electric Drives Class: 4 Year/ VII SemesterDocument35 pagesCharacteristics of Electric Drives: Subject Name: Electric Drives Class: 4 Year/ VII SemesterBabbu DograNo ratings yet
- Unit-V Electric DrivesDocument24 pagesUnit-V Electric DrivesVIKASH MALIKNo ratings yet
- PDFDocument32 pagesPDFdinesh kNo ratings yet
- Part-1 Electric DrivesDocument51 pagesPart-1 Electric Drivesankushff7872No ratings yet
- Eet 3454 Lecture Notes 31.01.2024Document51 pagesEet 3454 Lecture Notes 31.01.2024blessedgeraldie78No ratings yet
- Eet 3454 Electrical Machine Drives CompleteDocument138 pagesEet 3454 Electrical Machine Drives Completeblessedgeraldie78No ratings yet
- Kongu Engineering College, PerunduraiDocument23 pagesKongu Engineering College, PerunduraiSingh VelNo ratings yet
- EDC Unit-1 PDFDocument32 pagesEDC Unit-1 PDFsivaNo ratings yet
- Electrical Drives and ControlDocument13 pagesElectrical Drives and ControlUΠIQUΣ TΔMILNo ratings yet
- 6034 April 19Document15 pages6034 April 19Hat HackersNo ratings yet
- 2 Marks (Questions & Answers) : Geared Coupling Power SupplyDocument5 pages2 Marks (Questions & Answers) : Geared Coupling Power SupplypugazhendiraNo ratings yet
- Utilization of Electrical Energy (1-100) 11Document100 pagesUtilization of Electrical Energy (1-100) 11Gopala Krishna YadavNo ratings yet
- Unit - I Selection of Motors: in Spite of The Advantages of AC Motor, Sometimes DC Motor Is Used BecauseDocument45 pagesUnit - I Selection of Motors: in Spite of The Advantages of AC Motor, Sometimes DC Motor Is Used BecauseSuresh PenagaluruNo ratings yet
- Electrical Machines and Drives/Electrical Drives and Control Third Semester Mechanical Engineering 2 Marks (Questions & Answers)Document7 pagesElectrical Machines and Drives/Electrical Drives and Control Third Semester Mechanical Engineering 2 Marks (Questions & Answers)Joseph HarindranathNo ratings yet
- MJET Engg. CollegeDocument74 pagesMJET Engg. CollegePiyush AgrawalNo ratings yet
- UEE-UNIT-I UeeDocument41 pagesUEE-UNIT-I UeeSravya TNo ratings yet
- DRIVE: A Drive Is One, Which Provides Mechanical Energy To The Machine. ThereDocument19 pagesDRIVE: A Drive Is One, Which Provides Mechanical Energy To The Machine. ThereJennifer PotterNo ratings yet
- Adesh Edc Ut1Document6 pagesAdesh Edc Ut1harshshelke 123No ratings yet
- Utilization of Electrical Energy PDFDocument421 pagesUtilization of Electrical Energy PDFManoj KumarNo ratings yet
- Electric Drives: Subject Code: EEE11 Credit: 3: 0: 0Document28 pagesElectric Drives: Subject Code: EEE11 Credit: 3: 0: 0Harsh ThamkeNo ratings yet
- Types of DriveDocument13 pagesTypes of DrivecoolrajeeeNo ratings yet
- Black HoleDocument2 pagesBlack HoleGooge ReviewerNo ratings yet
- Residential power supply systems overviewDocument1 pageResidential power supply systems overviewGooge ReviewerNo ratings yet
- Frequency and Voltage ManagementDocument7 pagesFrequency and Voltage ManagementGooge ReviewerNo ratings yet
- Commercial Power Systems: National Electrical CodeDocument7 pagesCommercial Power Systems: National Electrical CodeGooge ReviewerNo ratings yet
- Celestial objects and bodiesDocument7 pagesCelestial objects and bodiesGooge ReviewerNo ratings yet
- Basics of Electric PowerDocument1 pageBasics of Electric PowerGooge ReviewerNo ratings yet
- Commercial Power Systems: National Electrical CodeDocument7 pagesCommercial Power Systems: National Electrical CodeGooge ReviewerNo ratings yet
- Consciousness of Human Mind - NotesDocument1 pageConsciousness of Human Mind - NotesGooge ReviewerNo ratings yet
- Consciousness - NotesDocument1 pageConsciousness - NotesGooge ReviewerNo ratings yet
- Biological Function and Evolution - NotesDocument2 pagesBiological Function and Evolution - NotesGooge ReviewerNo ratings yet
- Need Quotation To VerifyDocument1 pageNeed Quotation To VerifyGooge ReviewerNo ratings yet
- Philosophy of Mind: The Coherence of The ConceptDocument2 pagesPhilosophy of Mind: The Coherence of The ConceptGooge ReviewerNo ratings yet
- Protective Devices: Power System ProtectionDocument2 pagesProtective Devices: Power System ProtectionGooge ReviewerNo ratings yet
- Forms of Consciousness: Simple Consciousness, Possessed by Both Animals and MankindDocument3 pagesForms of Consciousness: Simple Consciousness, Possessed by Both Animals and MankindGooge ReviewerNo ratings yet
- Homeopathy GuidelinesDocument12 pagesHomeopathy GuidelinesVjPratzNo ratings yet
- How To Shut Hibernate Sleep Windows PCDocument6 pagesHow To Shut Hibernate Sleep Windows PCGooge ReviewerNo ratings yet
- Consciousness - NotesDocument1 pageConsciousness - NotesGooge Reviewer100% (1)
- Siddha GuidelinesDocument16 pagesSiddha GuidelinesDheeraj BhomaNo ratings yet
- XLPE Insulated Low Voltage Cables 2012Document40 pagesXLPE Insulated Low Voltage Cables 2012Googe ReviewerNo ratings yet
- Siddha GuidelinesDocument16 pagesSiddha GuidelinesDheeraj BhomaNo ratings yet
- Relay Setting Calculation Rev.1 PDFDocument113 pagesRelay Setting Calculation Rev.1 PDFtarik.taspinar85% (27)
- Arc FlashDocument14 pagesArc FlashpavlovicgNo ratings yet
- Thermal Power Station in India 2016Document16 pagesThermal Power Station in India 2016anupamrcNo ratings yet
- unit4-EEE-DATA COMPRESSION AND NETWORK SECURITYDocument56 pagesunit4-EEE-DATA COMPRESSION AND NETWORK SECURITYGooge ReviewerNo ratings yet
- Unit1-EEE Computer Networks - EthetnetDocument39 pagesUnit1-EEE Computer Networks - EthetnetPandiyanNo ratings yet
- 30 TOP MOST MAGNETIC CIRCUIT - Electrical Engineering Multiple Choice Questions and Answers Electrical Engineering Multiple Choice QuestionsDocument5 pages30 TOP MOST MAGNETIC CIRCUIT - Electrical Engineering Multiple Choice Questions and Answers Electrical Engineering Multiple Choice QuestionsPandiyanNo ratings yet
- Ducab XLPEDocument44 pagesDucab XLPEZechNo ratings yet
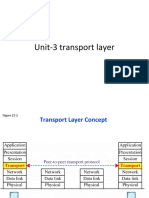
- Unit 3 Tranport Layer in Computer Networks NotesDocument61 pagesUnit 3 Tranport Layer in Computer Networks NotesGooge ReviewerNo ratings yet
- Powin Energy Battery Energy GuideDocument2 pagesPowin Energy Battery Energy GuideGooge ReviewerNo ratings yet
- Powin Energy Battery Energy GuideDocument2 pagesPowin Energy Battery Energy GuideGooge ReviewerNo ratings yet
- Plan Estimasi Pengerjaan Splicing Belt Cv07&Cv08 (Version 2)Document1 pagePlan Estimasi Pengerjaan Splicing Belt Cv07&Cv08 (Version 2)SadamNo ratings yet
- Power Supplies BrochureDocument12 pagesPower Supplies BrochureMuhamad PriyatnaNo ratings yet
- Onkyo SKW 204 Service ManualDocument11 pagesOnkyo SKW 204 Service ManualLuis Tellez CedeñoNo ratings yet
- Worksheet 16 ElectromagneismDocument5 pagesWorksheet 16 ElectromagneismLIM CHIAN CHIANNo ratings yet
- RFA FormDocument2 pagesRFA FormRitche Lim BragaisNo ratings yet
- Finolex Wires Cables Pricelist PDFDocument2 pagesFinolex Wires Cables Pricelist PDFPratik GuptaNo ratings yet
- One-Line Diagram - OLV1 (Harmonic Analysis) : Mdb-It - ADocument1 pageOne-Line Diagram - OLV1 (Harmonic Analysis) : Mdb-It - AMuralidharan KandhasamyNo ratings yet
- Electric CircuitsDocument49 pagesElectric CircuitsMIGUELNo ratings yet
- 10-LED Driver and GPIO Controller: Features General DescriptionDocument33 pages10-LED Driver and GPIO Controller: Features General DescriptionСергій ПіхалоNo ratings yet
- Bremshey Treadline Trail TreadmillDocument76 pagesBremshey Treadline Trail TreadmillPeter ChelmisNo ratings yet
- Altivar Process - ATV930 - 950 - Installation - Manual - EN - NHA80932 - 09 142 144Document2 pagesAltivar Process - ATV930 - 950 - Installation - Manual - EN - NHA80932 - 09 142 144Muhammad SyaifulhaqNo ratings yet
- Finisher l1 IR1600 SMDocument171 pagesFinisher l1 IR1600 SMremote controlNo ratings yet
- Parts of A Power Transformer - OwlcationDocument5 pagesParts of A Power Transformer - OwlcationYirga MelesewNo ratings yet
- Laboratory Procedure For Acceptance of Thermocouple Wire IECEE CTL-OP 109 Ed2 - 20100707Document3 pagesLaboratory Procedure For Acceptance of Thermocouple Wire IECEE CTL-OP 109 Ed2 - 20100707Gustavo SánchezNo ratings yet
- 마이크로전자회로 ppt 파일Document17 pages마이크로전자회로 ppt 파일강민수No ratings yet
- 37 Question & Answers On DC GeneratorsDocument5 pages37 Question & Answers On DC Generatorsreza100% (1)
- B ATEX enDocument14 pagesB ATEX enAsa ReidNo ratings yet
- Hac - Pilot Competencies For Helicopter Wildfire OpsDocument26 pagesHac - Pilot Competencies For Helicopter Wildfire OpsPablo SánchezNo ratings yet
- DC Arc Flash Calculations For Solar Farms (Stantec Method)Document6 pagesDC Arc Flash Calculations For Solar Farms (Stantec Method)Mike WeimerNo ratings yet
- TVL - Ia: Quarter 3 - Module 5Document14 pagesTVL - Ia: Quarter 3 - Module 5Chiarnie LopezNo ratings yet
- Lab 1 Introduction To Power System Protection UpdatedDocument21 pagesLab 1 Introduction To Power System Protection UpdatedKhadijaNo ratings yet
- Fastener Size Chart TitleDocument1 pageFastener Size Chart TitlejayendrapatilNo ratings yet
- 1N4001 To 1N4007 - Rectron PDFDocument2 pages1N4001 To 1N4007 - Rectron PDFpaulaNo ratings yet
- ALTERNATOR - ST170741: Parts ListDocument2 pagesALTERNATOR - ST170741: Parts Listkaswade BrianNo ratings yet
- Detector de Duto FMDocument1 pageDetector de Duto FMJardenson CésarNo ratings yet
- Tutorial 1 - SolutionDocument2 pagesTutorial 1 - Solutionkant734No ratings yet
- Testing StrategiesDocument8 pagesTesting StrategiesJohnny Pancito Rodriguez100% (1)
- Electrically Short AntennasDocument110 pagesElectrically Short AntennasKontojNo ratings yet
- Electrical ToolDocument4 pagesElectrical Toolearljane. bustamanteNo ratings yet
- Aia 360 Operators Manual Rev14Document136 pagesAia 360 Operators Manual Rev14Juan Ramirez100% (1)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (542)
- Off-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemFrom EverandOff-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemNo ratings yet
- 8051 Microcontroller: An Applications Based IntroductionFrom Everand8051 Microcontroller: An Applications Based IntroductionRating: 5 out of 5 stars5/5 (6)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialFrom EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialRating: 3.5 out of 5 stars3.5/5 (3)
- Practical Troubleshooting of Electrical Equipment and Control CircuitsFrom EverandPractical Troubleshooting of Electrical Equipment and Control CircuitsRating: 4 out of 5 stars4/5 (5)
- Upcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)From EverandUpcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)Rating: 4.5 out of 5 stars4.5/5 (2)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersFrom Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersRating: 5 out of 5 stars5/5 (1)
- Practical Electronics for Inventors, Fourth EditionFrom EverandPractical Electronics for Inventors, Fourth EditionRating: 4 out of 5 stars4/5 (3)
- Ramblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowFrom EverandRamblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowNo ratings yet
- Lithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsFrom EverandLithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsRating: 5 out of 5 stars5/5 (2)
- The Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026From EverandThe Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Rating: 5 out of 5 stars5/5 (1)
- Programming the Raspberry Pi, Third Edition: Getting Started with PythonFrom EverandProgramming the Raspberry Pi, Third Edition: Getting Started with PythonRating: 5 out of 5 stars5/5 (2)
- The Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesFrom EverandThe Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesRating: 5 out of 5 stars5/5 (1)
- The Rare Metals War: the dark side of clean energy and digital technologiesFrom EverandThe Rare Metals War: the dark side of clean energy and digital technologiesRating: 5 out of 5 stars5/5 (2)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeFrom EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeRating: 5 out of 5 stars5/5 (8)
- Current Interruption Transients CalculationFrom EverandCurrent Interruption Transients CalculationRating: 4 out of 5 stars4/5 (1)
- The Graphene Revolution: The Weird Science of the Ultra-thinFrom EverandThe Graphene Revolution: The Weird Science of the Ultra-thinRating: 4.5 out of 5 stars4.5/5 (4)
- High Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsFrom EverandHigh Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsRating: 4 out of 5 stars4/5 (1)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4 out of 5 stars4/5 (331)
- Understanding Automotive Electronics: An Engineering PerspectiveFrom EverandUnderstanding Automotive Electronics: An Engineering PerspectiveRating: 3.5 out of 5 stars3.5/5 (16)