You might also like
- Development Status and Trend of Control System and Intelligent Equipment For GreenhouseDocument4 pagesDevelopment Status and Trend of Control System and Intelligent Equipment For GreenhousekiranNo ratings yet
- Design of Intelligent Greenhouse Environment Monitoring System Based On Zigbee and Embedded TechnologyDocument3 pagesDesign of Intelligent Greenhouse Environment Monitoring System Based On Zigbee and Embedded TechnologykiranNo ratings yet
- Study Report On Using Iot Agriculture Farm Monitoring: January 2019Document10 pagesStudy Report On Using Iot Agriculture Farm Monitoring: January 2019kiranNo ratings yet
- IOT Based Precision Horticulture in North IndiaDocument6 pagesIOT Based Precision Horticulture in North IndiakiranNo ratings yet
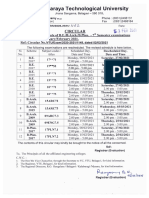
- Circular 1162Document1 pageCircular 1162kiranNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Computer Organization and Design Mips Edition 5th Edition Patterson Solutions ManualDocument9 pagesComputer Organization and Design Mips Edition 5th Edition Patterson Solutions Manualmatthewmorrisonsmwqkifnjx94% (17)
- 20130721161418-Pixie Kit InstructionsDocument6 pages20130721161418-Pixie Kit InstructionsMircea BujorNo ratings yet
- OTDRDocument35 pagesOTDRkamenRider AgitoNo ratings yet
- PDS S-Series Electronic MarshallingDocument42 pagesPDS S-Series Electronic Marshallingarviel_lea31No ratings yet
- Model DLDocument18 pagesModel DLAziz Syahrul RahmadanNo ratings yet
- C310 HW6 1Document3 pagesC310 HW6 1Richard McdanielNo ratings yet
- Catalog Excerpt-VariTrans A 26000 - En-Knick PDFDocument6 pagesCatalog Excerpt-VariTrans A 26000 - En-Knick PDFThilak PonnusamyNo ratings yet
- General Purpose Programmable Peripheral DevicesDocument33 pagesGeneral Purpose Programmable Peripheral DevicesSudarshanBhardwajNo ratings yet
- Anna University Robotics Exam Questions on Configurations, Kinematics & ProgrammingDocument2 pagesAnna University Robotics Exam Questions on Configurations, Kinematics & ProgrammingRajamuthamilselvan MarimuthuNo ratings yet
- Tutorial 1 ITT400 CS2302A Group 4Document10 pagesTutorial 1 ITT400 CS2302A Group 4fatin farhanahNo ratings yet
- Switched Mode Power Supply Specifications: Technical DataDocument42 pagesSwitched Mode Power Supply Specifications: Technical DataHELRY CAMPREGHERNo ratings yet
- Index & Warnings: Service ManualDocument10 pagesIndex & Warnings: Service ManualAnonymous Syjpyt4MoNo ratings yet
- 8000 Series Information Sheet2Document2 pages8000 Series Information Sheet2Ian RowleyNo ratings yet
- (Online) : ABU Asia-Pacific Robot Contest 2022 New Delhi, IndiaDocument16 pages(Online) : ABU Asia-Pacific Robot Contest 2022 New Delhi, IndiaNirmal Prasad PantaNo ratings yet
- Design of Delay Efficient Modified 16 Bit Wallace MultiplierDocument5 pagesDesign of Delay Efficient Modified 16 Bit Wallace MultiplierCharan MsdNo ratings yet
- Introduction To Electrical Engineering Principles e - 22!02!2023Document51 pagesIntroduction To Electrical Engineering Principles e - 22!02!2023Youth Empowerment and Talent RecognitionNo ratings yet
- MIMO Part 1Document30 pagesMIMO Part 1Abu Huzaifah BidinNo ratings yet
- PK Industrial Plugs and Sockets CatalogueDocument110 pagesPK Industrial Plugs and Sockets CataloguethienNo ratings yet
- Chapter 1. General IntroductionDocument15 pagesChapter 1. General IntroductionTài Huỳnh VănNo ratings yet
- Instruction Manual IEC61850 Communication GR200 Series: 6F2S190 6 (Rev. 0.4)Document36 pagesInstruction Manual IEC61850 Communication GR200 Series: 6F2S190 6 (Rev. 0.4)Bear DguNo ratings yet
- Four Bit Up CounterDocument2 pagesFour Bit Up CounterYashasvi VijayvargiyaNo ratings yet
- An Adaptive Reconfigurable Rectifier For Wireless Power TransmissionDocument3 pagesAn Adaptive Reconfigurable Rectifier For Wireless Power Transmissionkavirasu1990No ratings yet
- Keyes - Infrared Receiver and Transmitter ModuleDocument9 pagesKeyes - Infrared Receiver and Transmitter ModulePedro MorrisNo ratings yet
- Electrical Test EquipmentDocument23 pagesElectrical Test EquipmentChristine joy VelezNo ratings yet
- DB/supply Test Report SummaryDocument4 pagesDB/supply Test Report SummaryMatthew Stuart100% (1)
- Micom P342/3/4/5: Generator Protection RelaysDocument8 pagesMicom P342/3/4/5: Generator Protection RelaysLa Picarona del PeruNo ratings yet
- ControlLogix System User ManualDocument232 pagesControlLogix System User ManualMusad AlQadi Bani Hammad100% (1)
- Phase and Group VelocityDocument3 pagesPhase and Group VelocityKeshav ChhapoliaNo ratings yet
- Lab 5. FIR & IIR Filters in Matlab: Filter DesignDocument12 pagesLab 5. FIR & IIR Filters in Matlab: Filter DesignDrakshayaniMurgodNo ratings yet
- MIL-DTL-38999 Electrical Connector SpecificationDocument159 pagesMIL-DTL-38999 Electrical Connector SpecificationJader PetrucciNo ratings yet