You might also like
- Built in The Heavens CYOADocument24 pagesBuilt in The Heavens CYOAMatthew DixonNo ratings yet
- 2614790-Hill Giants River GauntletDocument4 pages2614790-Hill Giants River GauntletАкмат ИсмаиловNo ratings yet
- Oil Skimmer RobotDocument18 pagesOil Skimmer RobotDhanesh SHNo ratings yet
- Integrated Sand Management For Effective Hydrocarbon Flow AssuranceFrom EverandIntegrated Sand Management For Effective Hydrocarbon Flow AssuranceNo ratings yet
- Roll ControlDocument19 pagesRoll Controlfarhanabdulkarim100% (1)
- Marine Engineering System IntroductionDocument114 pagesMarine Engineering System Introductionsuvabrata_das01100% (12)
- Container HandbookDocument194 pagesContainer HandbookAamir Sirohi75% (4)
- NNFMDocument82 pagesNNFMGalrahnNo ratings yet
- 2023-RegisterBook Version 202212Document95 pages2023-RegisterBook Version 202212Moin AltafNo ratings yet
- Naval Architecture - I For IMU Syllabus 2017 PDFDocument571 pagesNaval Architecture - I For IMU Syllabus 2017 PDFSanjay Tiadi100% (2)
- Mesh ShipDocument7 pagesMesh ShipPranshu MalikNo ratings yet
- Draft SurveyDocument24 pagesDraft SurveyGeorge Cristian100% (1)
- Applications of Multiphase Desander TechnologyDocument19 pagesApplications of Multiphase Desander TechnologyanisNo ratings yet
- Bulk Material Handling: Practical Guidance for Mechanical EngineersFrom EverandBulk Material Handling: Practical Guidance for Mechanical EngineersRating: 5 out of 5 stars5/5 (1)
- Parts of The ShipDocument28 pagesParts of The ShipDonsumit PrajapatiNo ratings yet
- Micro Bubble Flotation Technology in Secondary Tertiary Produced Water Treatment English A4Document19 pagesMicro Bubble Flotation Technology in Secondary Tertiary Produced Water Treatment English A4DeepakKumarGorai100% (1)
- DNV-RU-SHIP Pt.6 Ch.5Document374 pagesDNV-RU-SHIP Pt.6 Ch.5Sala SalaNo ratings yet
- Module - MAXSURF For Ship Design, Construction & Hydrodynamic - Basic - Day 1Document37 pagesModule - MAXSURF For Ship Design, Construction & Hydrodynamic - Basic - Day 1andreNo ratings yet
- Maritime Safety2 MasterDocument106 pagesMaritime Safety2 MasterVioleta Geileanu100% (1)
- World Navies Today - Other American NaviesDocument14 pagesWorld Navies Today - Other American Naviesjb2ookworm0% (1)
- Survey Report: M/V "Marina R"Document17 pagesSurvey Report: M/V "Marina R"I'm Tai100% (1)
- Current Knowledge and Potential Applications of Cavitation Technologies For The Petroleum IndustryDocument15 pagesCurrent Knowledge and Potential Applications of Cavitation Technologies For The Petroleum IndustryJulio Pérez100% (1)
- Guidance Mooring Safe Way PDFDocument88 pagesGuidance Mooring Safe Way PDFdivan semestaNo ratings yet
- Clean The OilDocument15 pagesClean The OilBenjamin BakoNo ratings yet
- 12 CRRT Mechanical CleanupDocument2 pages12 CRRT Mechanical Cleanuppc1957No ratings yet
- Development of A High-Efficiency Autonomous Marine Debris and Oil Removal SystemDocument9 pagesDevelopment of A High-Efficiency Autonomous Marine Debris and Oil Removal SystemAmmiel PerezNo ratings yet
- Design and Fabrication of A Drum Type Oil Skimmer Machine Powered by Solar EnergyDocument27 pagesDesign and Fabrication of A Drum Type Oil Skimmer Machine Powered by Solar EnergyMark Andrew CabaleNo ratings yet
- Oil SkimmerDocument13 pagesOil SkimmerNexgen TechnologyNo ratings yet
- Background of The Problem: STI College CubaoDocument10 pagesBackground of The Problem: STI College CubaoAlebelle JaneNo ratings yet
- Oilskimmer ICMERE2021Document7 pagesOilskimmer ICMERE2021Esnardo Jared RalphNo ratings yet
- Journal of Membrane Science: 2 Qi Zhong, Guogui Shi, Qing Sun, Peng Mu, Jian LiDocument11 pagesJournal of Membrane Science: 2 Qi Zhong, Guogui Shi, Qing Sun, Peng Mu, Jian LiJocilene Dantas Torres NascimentoNo ratings yet
- Oil Spill and Methods To Recover A ReviewDocument3 pagesOil Spill and Methods To Recover A ReviewEditor IJTSRDNo ratings yet
- Magnetic Separation Methodfor Oil Spill CleanupDocument4 pagesMagnetic Separation Methodfor Oil Spill CleanupalanNo ratings yet
- NanomaquinasDocument7 pagesNanomaquinasanahicalvillo96No ratings yet
- Review On Membranes For The Filtration of Aqueous Based Solution - Oil in Water Emulsion - 2018Document16 pagesReview On Membranes For The Filtration of Aqueous Based Solution - Oil in Water Emulsion - 2018Carmen StefanescuNo ratings yet
- Handling and Disposal of Oily Waste From Oil SpillDocument14 pagesHandling and Disposal of Oily Waste From Oil Spillrante angel100% (1)
- Oil SkimmerDocument8 pagesOil SkimmerrajkumarNo ratings yet
- Oil Spill TechniqueDocument5 pagesOil Spill TechniqueDemigodNo ratings yet
- Flat Belt Type Oil SkimmerDocument15 pagesFlat Belt Type Oil SkimmerNikesh More100% (1)
- Mitigation and Remediation Technologies of Waxy Crude OilsDocument35 pagesMitigation and Remediation Technologies of Waxy Crude OilsChandran UdumbasseriNo ratings yet
- Effective and Sustainable Adsorbent Materials For Oil Spill Cleanup Based On A Multistage Desalination ProcessDocument12 pagesEffective and Sustainable Adsorbent Materials For Oil Spill Cleanup Based On A Multistage Desalination Processحيدر عبدالمجيد كاظمNo ratings yet
- Fabrication of Oil SkimmerDocument6 pagesFabrication of Oil SkimmerGokulNo ratings yet
- Renewable EnergyDocument53 pagesRenewable EnergyMugil RajanNo ratings yet
- Uv Ballast Water Treatment Plant PDFDocument5 pagesUv Ballast Water Treatment Plant PDFNandan KolheNo ratings yet
- Ballast Water Treatment Methods: Fact Sheet 12Document2 pagesBallast Water Treatment Methods: Fact Sheet 12Putra AdamNo ratings yet
- Superhydrophobic and Super Oleophilic Natural Spong 2022 Journal of Water PRDocument10 pagesSuperhydrophobic and Super Oleophilic Natural Spong 2022 Journal of Water PRDavid NavarreteNo ratings yet
- Journalnx DesignDocument3 pagesJournalnx DesignJournalNX - a Multidisciplinary Peer Reviewed JournalNo ratings yet
- Enhanced Produced Water De-Oiling TechDocument13 pagesEnhanced Produced Water De-Oiling TechrakicbgNo ratings yet
- Archetti Oil SpillDocument4 pagesArchetti Oil SpillResniOktaviaNo ratings yet
- Full Report-Oil Skimmer Cum Metal Chip CollectorDocument55 pagesFull Report-Oil Skimmer Cum Metal Chip Collectorrajkumar100% (1)
- Development of A Handy OilskimmerDocument6 pagesDevelopment of A Handy OilskimmerVishal BhardwajNo ratings yet
- Alter Ego 1 EleveDocument8 pagesAlter Ego 1 EleveNiicolas EscobarrNo ratings yet
- Irjet V7i4151Document3 pagesIrjet V7i4151Belha HentatiNo ratings yet
- Microcrystalline Cellulose Aerogels For Oil Spill RemediationDocument29 pagesMicrocrystalline Cellulose Aerogels For Oil Spill RemediationLiam McHughNo ratings yet
- Application of Multiphase Desander Technology To Oil and Gas ProductionDocument19 pagesApplication of Multiphase Desander Technology To Oil and Gas ProductionJose Rodrigo Salguero DuranNo ratings yet
- 5Document11 pages5Dr Mujahid MehdiNo ratings yet
- Nehad Paper-1Document16 pagesNehad Paper-1Nguyễn Chính TrườngNo ratings yet
- Journal of Colloid and Interface ScienceDocument12 pagesJournal of Colloid and Interface ScienceRifkiSealover'sNo ratings yet
- Decision Support System For Scrubber Selection - v2 - Sep20Document6 pagesDecision Support System For Scrubber Selection - v2 - Sep20Venkatesh NATARAJANNo ratings yet
- 49 FullDocument9 pages49 Fullraluca.mariaNo ratings yet
- Design and Fabrication of Superwetting Fiberbased Membranes For OilwaterDocument18 pagesDesign and Fabrication of Superwetting Fiberbased Membranes For Oilwateralihaddadzadeh2018No ratings yet
- Chemical Engineering Journal: A A A BDocument7 pagesChemical Engineering Journal: A A A BnmnmnmNo ratings yet
- Endless Belt Type Oil Skimmer-293Document6 pagesEndless Belt Type Oil Skimmer-293melpomenneNo ratings yet
- 9 Methods For ODocument6 pages9 Methods For OErmiasNo ratings yet
- High Volume Centrifugal Oil-Water Separation 00526746Document5 pagesHigh Volume Centrifugal Oil-Water Separation 00526746Hanif HalimNo ratings yet
- Oil Spill Cleanup Using AerographeneDocument9 pagesOil Spill Cleanup Using AerographeneSara AguilarNo ratings yet
- Upstream Operations in The Oil Industry Rigorous MDocument12 pagesUpstream Operations in The Oil Industry Rigorous MShakerMahmoodNo ratings yet
- Bio Project FINAL 3Document26 pagesBio Project FINAL 3santhosh naiduNo ratings yet
- 1 s2.0 S2214785321002443 MainDocument4 pages1 s2.0 S2214785321002443 Mainjhon harvey carreño hernandezNo ratings yet
- Modern Chemical TankersDocument41 pagesModern Chemical TankersHtoo Htoo Kyaw100% (1)
- TMS Airbags Vs PNE WhitepaperDocument28 pagesTMS Airbags Vs PNE WhitepaperJeff TrinidadNo ratings yet
- Batch 7.1Document9 pagesBatch 7.1ramsicon1No ratings yet
- AReportof Oil Spill Recovery TechnologiesDocument15 pagesAReportof Oil Spill Recovery Technologiesreyna ocampoNo ratings yet
- Cours Marine PollutionDocument16 pagesCours Marine PollutionYannick PakaNo ratings yet
- Oil Sands Operators Tackle Tailings Management ChallengesDocument3 pagesOil Sands Operators Tackle Tailings Management ChallengesJaveed A. KhanNo ratings yet
- Oil Skimmer BoatDocument11 pagesOil Skimmer Boatramsicon1No ratings yet
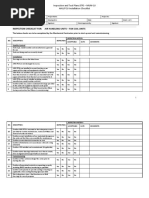
- Inspection Checklist For: Air Handling Units + Fan Coil UnitsDocument3 pagesInspection Checklist For: Air Handling Units + Fan Coil UnitsnmnmnmNo ratings yet
- Chemical Engineering Journal: A A A BDocument7 pagesChemical Engineering Journal: A A A BnmnmnmNo ratings yet
- Solar Operated Oil Skimmer: Mr. Suyog Zagadu, Mr. Sanmesh Chavan, Prof. Varsha MagarDocument5 pagesSolar Operated Oil Skimmer: Mr. Suyog Zagadu, Mr. Sanmesh Chavan, Prof. Varsha MagarnmnmnmNo ratings yet
- Design, Analysis and Manufacturing of Disc Type Oil SkimmerDocument4 pagesDesign, Analysis and Manufacturing of Disc Type Oil SkimmernmnmnmNo ratings yet
- Estimation of Surface Areas 09dec2022Document4 pagesEstimation of Surface Areas 09dec2022Mohammed TabrezNo ratings yet
- Maritime Economics 3rd Edition: Martín StopfordDocument11 pagesMaritime Economics 3rd Edition: Martín StopfordKittn HuffaNo ratings yet
- Bourbon Hector 3230 T DWT Dp2Document2 pagesBourbon Hector 3230 T DWT Dp2Fikri KurniaNo ratings yet
- BSM SM CVDocument36 pagesBSM SM CVAndrei BaciuNo ratings yet
- TPC7 Module 1Document18 pagesTPC7 Module 1malouNo ratings yet
- Iww Danube Ship Design Final December 2009 PDFDocument121 pagesIww Danube Ship Design Final December 2009 PDFMaxiNo ratings yet
- Paper Alta VelocidadDocument15 pagesPaper Alta VelocidadLeo VillaNo ratings yet
- The Draught Surveyor - Louis KoutelasDocument25 pagesThe Draught Surveyor - Louis KoutelasBolarinwa0% (1)
- A2 Shipboard Fittings and Supporting Hull Structures Associated With Towing and Mooring On Conventional Vessels A2Document6 pagesA2 Shipboard Fittings and Supporting Hull Structures Associated With Towing and Mooring On Conventional Vessels A2tonyNo ratings yet
- Workboat World Article On Safehaven MarineDocument1 pageWorkboat World Article On Safehaven MarineFrank KowalskiNo ratings yet
- Cargo Shipping Management System Project DocumentationDocument18 pagesCargo Shipping Management System Project DocumentationBhavya VinayNo ratings yet
- Bunkering-Oil Transfer ChecklistDocument1 pageBunkering-Oil Transfer ChecklistM SundaramNo ratings yet
- List of New and Revised IACS Resolutions Published in 2021Document4 pagesList of New and Revised IACS Resolutions Published in 2021Trinidad M.LNo ratings yet