You might also like
- Instruments, Measurement Principles and Communication Technologies for Downhole Drilling EnvironmentsFrom EverandInstruments, Measurement Principles and Communication Technologies for Downhole Drilling EnvironmentsNo ratings yet
- Weather ForecastDocument56 pagesWeather ForecastAakash Ńąmðév100% (1)
- Hydraulic Loader Crane - Operator Workplace Risk AssessmentDocument8 pagesHydraulic Loader Crane - Operator Workplace Risk AssessmentGogyNo ratings yet
- 10799-Texto Del Artículo-39965-2-10-20210204Document13 pages10799-Texto Del Artículo-39965-2-10-20210204Steve DemirelNo ratings yet
- Last ReportDocument19 pagesLast ReportPratik SaindanePatilNo ratings yet
- Testing Accuracy of Maritime DGPS System Based On Long-Term Measurements Campaigns Over The Years 2006-2014Document9 pagesTesting Accuracy of Maritime DGPS System Based On Long-Term Measurements Campaigns Over The Years 2006-2014Seamen 777No ratings yet
- Report On Nanaorobot 3 PDFDocument22 pagesReport On Nanaorobot 3 PDFAmir ShaikhNo ratings yet
- Facade Renewal of Generalštab BuildingDocument26 pagesFacade Renewal of Generalštab BuildingEmilija NikolicNo ratings yet
- Space Nanotechnology VDIDocument135 pagesSpace Nanotechnology VDIkrithika rajendran100% (1)
- Seismic Design of An RC Twelve-Storey Building According To Eurocode 8Document9 pagesSeismic Design of An RC Twelve-Storey Building According To Eurocode 8Michael yilmaNo ratings yet
- Srinivas - 2017 - IOP - Conf. - Ser. - Mater. - Sci. - Eng. - 197 - 012077Document15 pagesSrinivas - 2017 - IOP - Conf. - Ser. - Mater. - Sci. - Eng. - 197 - 012077SulaimanNo ratings yet
- The Use of Unmanned Aerial Vehicles (UAVs) For EngineeringDocument45 pagesThe Use of Unmanned Aerial Vehicles (UAVs) For EngineeringNur khairul DanielNo ratings yet
- 2014-03-23 Chapter - ID 24326 7x10Document33 pages2014-03-23 Chapter - ID 24326 7x10Suman SahaNo ratings yet
- Final Mini Project ReportDocument28 pagesFinal Mini Project ReportVikas FulareNo ratings yet
- Testing Instrumento de CalibraciónDocument10 pagesTesting Instrumento de CalibraciónCompliax ConsultoresNo ratings yet
- Autonomous Underwater Vehicles Recent deDocument8 pagesAutonomous Underwater Vehicles Recent demata mareNo ratings yet
- NDVI CubeSat Low CostDocument101 pagesNDVI CubeSat Low CostFRANKLIN JOSUE TICONA COAQUIRANo ratings yet
- IRJMETS40300087641Document3 pagesIRJMETS4030008764138 aarti dhageNo ratings yet
- Zephyr-2 Design Report 2Document59 pagesZephyr-2 Design Report 2Vedant RanaNo ratings yet
- Jurnal 5Document8 pagesJurnal 5Naga HijauNo ratings yet
- Machine Learning Applications in Earthquake Engineering, A Literature ReviewDocument13 pagesMachine Learning Applications in Earthquake Engineering, A Literature ReviewEmby BinoeNo ratings yet
- SurveyofUnderwaterNDTTechnologiesforOffshoreAssets PDFDocument11 pagesSurveyofUnderwaterNDTTechnologiesforOffshoreAssets PDFnaseemtycheNo ratings yet
- Design and Development of Surveillance DroneDocument5 pagesDesign and Development of Surveillance DroneIJRASETPublicationsNo ratings yet
- Yarce 2017 J. Phys. Conf. Ser. 850 012019Document11 pagesYarce 2017 J. Phys. Conf. Ser. 850 012019botametunosegaNo ratings yet
- Screenshot 2023-10-26 at 11.20.24 AMDocument7 pagesScreenshot 2023-10-26 at 11.20.24 AMmzeb390No ratings yet
- Daniella 2015Document90 pagesDaniella 2015Bayu EkaNo ratings yet
- Usth W2day1 Lec4 NDTDocument43 pagesUsth W2day1 Lec4 NDTTuan VuNo ratings yet
- Aliot Pc2 Sdn-And-iot WebDocument132 pagesAliot Pc2 Sdn-And-iot Webmohammed meladNo ratings yet
- Ii/Iv Bachelor of Technology: Submitted byDocument32 pagesIi/Iv Bachelor of Technology: Submitted byPeerzada WahidNo ratings yet
- Open-Source UAV Flight ControllersDocument13 pagesOpen-Source UAV Flight ControllersNivedita Acharyya 2035No ratings yet
- DroneDocument19 pagesDroneArchit SomaniNo ratings yet
- Report PDFDocument118 pagesReport PDFDeep ChoudharyNo ratings yet
- Cloud Computing Security From Single To Mutli CloudsDocument80 pagesCloud Computing Security From Single To Mutli Cloudsppjadhav920No ratings yet
- DESIGN and ANALYSIS of UNAMANNED AERIAL VEHICLEDocument4 pagesDESIGN and ANALYSIS of UNAMANNED AERIAL VEHICLEeno emoNo ratings yet
- Distributed Digital Survey Logbook Built On Geoserver and PostgisDocument2 pagesDistributed Digital Survey Logbook Built On Geoserver and PostgismarouanNo ratings yet
- Final - Mini Seminar - DocDocument31 pagesFinal - Mini Seminar - DocVikas FulareNo ratings yet
- Ibrion 2023 J. Phys. Conf. Ser. 2507 012008Document17 pagesIbrion 2023 J. Phys. Conf. Ser. 2507 012008hamidzomorrodipNo ratings yet
- AF7 TecMedDocument8 pagesAF7 TecMedNicolás SilvaNo ratings yet
- Topic - 14 - Humidity Sensors 14-03986Document29 pagesTopic - 14 - Humidity Sensors 14-03986Nam Trịnh HồngNo ratings yet
- AGA21 Conference Proceedings - EHODocument15 pagesAGA21 Conference Proceedings - EHOjuliusvalladaresNo ratings yet
- A Project Report On Arduino Radar For OdDocument32 pagesA Project Report On Arduino Radar For OdAbhilash abhiNo ratings yet
- Di Vito 2021 IOP Conf. Ser. Mater. Sci. Eng. 1024 012089Document10 pagesDi Vito 2021 IOP Conf. Ser. Mater. Sci. Eng. 1024 01208918rosa18No ratings yet
- Visual Problems in Night OperationsDocument97 pagesVisual Problems in Night OperationsMargaret FordNo ratings yet
- Design Development and Analytical Process of Small Vertical Axis Wind TurbineDocument10 pagesDesign Development and Analytical Process of Small Vertical Axis Wind TurbineEditor IJTSRDNo ratings yet
- Report On Nanaorobot 3Document22 pagesReport On Nanaorobot 3Amir ShaikhNo ratings yet
- Dellinger 2016 IOP Conf. Ser. Earth Environ. Sci. 49 102002Document11 pagesDellinger 2016 IOP Conf. Ser. Earth Environ. Sci. 49 102002Milagros Alejandra Aragón DimasNo ratings yet
- Naval Postgraduate School: Monterey, CaliforniaDocument101 pagesNaval Postgraduate School: Monterey, CaliforniaFurkan Emin BostanNo ratings yet
- Add Title HereDocument10 pagesAdd Title Hereahmed faidyNo ratings yet
- Hassan 2019 IOP Conf. Ser. Mater. Sci. Eng. 610 012035Document14 pagesHassan 2019 IOP Conf. Ser. Mater. Sci. Eng. 610 012035mohammad1jamalNo ratings yet
- Ultrasonic Testing of Girth Welded Joint With TOFD PDFDocument2 pagesUltrasonic Testing of Girth Welded Joint With TOFD PDFbrocolinoNo ratings yet
- Aerodynamics LabDocument52 pagesAerodynamics LabayeshaNo ratings yet
- Solar Tracker Using Arduino and Simulation in TinkercadDocument6 pagesSolar Tracker Using Arduino and Simulation in TinkercadIJRASETPublicationsNo ratings yet
- Integrated Risk Assessment For LNG TerminalsDocument15 pagesIntegrated Risk Assessment For LNG TerminalsSinying SiaNo ratings yet
- Approaches and Solutions For Martian Spacesuit Design: September 2017Document16 pagesApproaches and Solutions For Martian Spacesuit Design: September 2017Aryan TomarNo ratings yet
- Devesh Jichkar Seminar ReportDocument27 pagesDevesh Jichkar Seminar ReportDevesh jichkarNo ratings yet
- Development Design of Risk Study of Natural Gas Pielines Dissemination and Substainment Upgrade of Safety EnactmentDocument10 pagesDevelopment Design of Risk Study of Natural Gas Pielines Dissemination and Substainment Upgrade of Safety EnactmentIJRASETPublicationsNo ratings yet
- Thesis - Pala AerogeneradoresDocument67 pagesThesis - Pala AerogeneradoresMjNo ratings yet
- Operational Diagnostics Synthesis of The Naval Gas Turbines Operated by The Polish NavyDocument24 pagesOperational Diagnostics Synthesis of The Naval Gas Turbines Operated by The Polish NavyebyNo ratings yet
- CV Copy 5Document3 pagesCV Copy 5api-723778293No ratings yet
- Article IJCRDocument6 pagesArticle IJCRAlessandro Da Cruz GoncalvesNo ratings yet
- Quadcopter PropellerDocument18 pagesQuadcopter PropellerJay SrivastavaNo ratings yet
- Van Der Waals Forces & Derjaguin Approximation: Bing-Sui Lu EmailDocument20 pagesVan Der Waals Forces & Derjaguin Approximation: Bing-Sui Lu Emailnguyễn namNo ratings yet
- Full Control of A QuadrotorDocument6 pagesFull Control of A Quadrotornguyễn namNo ratings yet
- Van Der Waals Forces & Derjaguin Approximation: Bing-Sui Lu EmailDocument20 pagesVan Der Waals Forces & Derjaguin Approximation: Bing-Sui Lu Emailnguyễn namNo ratings yet
- "Design & Development Analysis of Quadcopter": Parag Parihar, Priyanshu Bhawsar, Piyush HargodDocument6 pages"Design & Development Analysis of Quadcopter": Parag Parihar, Priyanshu Bhawsar, Piyush HargodAnonymous e7Rajar9SwNo ratings yet
- Techniques For Quadcopter Modelling & Design: A Review: ArticleDocument11 pagesTechniques For Quadcopter Modelling & Design: A Review: Articlenguyễn namNo ratings yet
- Endrowednes Kuantama - Final Quadcopter Bodyframe Model and AnalysisDocument4 pagesEndrowednes Kuantama - Final Quadcopter Bodyframe Model and Analysisnguyễn namNo ratings yet
- Low-Cost Microcontroller-Based Hover Control Design of A QuadcopterDocument7 pagesLow-Cost Microcontroller-Based Hover Control Design of A Quadcopternguyễn namNo ratings yet
- Design, Analysis and Fabrication of QuadcopterDocument12 pagesDesign, Analysis and Fabrication of Quadcopternguyễn namNo ratings yet
- Burke 2019Document4 pagesBurke 2019nguyễn namNo ratings yet
- Endrowednes Kuantama - Final Quadcopter Bodyframe Model and AnalysisDocument4 pagesEndrowednes Kuantama - Final Quadcopter Bodyframe Model and Analysisnguyễn namNo ratings yet
- Digital Relative Humidity & Temperature Sensor DHT11Document6 pagesDigital Relative Humidity & Temperature Sensor DHT11ham ghaNo ratings yet
- Quadcopter Flight Dynamics - KHAN14 PDFDocument6 pagesQuadcopter Flight Dynamics - KHAN14 PDFAaron Smirnov Garciia Ü .i.No ratings yet
- Burke 2019Document4 pagesBurke 2019nguyễn namNo ratings yet
- CV chuẩnDocument3 pagesCV chuẩnnguyễn namNo ratings yet
- Quadcopter Math Model (Amazing)Document26 pagesQuadcopter Math Model (Amazing)Joseph Oberholtzer83% (6)
- Velocity Control For A Quad-Rotor UAV Fly-By-Camera InterfaceDocument6 pagesVelocity Control For A Quad-Rotor UAV Fly-By-Camera Interfacenguyễn namNo ratings yet
- Quadcopter Propeller Design and Performance Analysis: Endrowednes Kuantama, Dan Craciun, Ioan Tarca and Radu TarcaDocument9 pagesQuadcopter Propeller Design and Performance Analysis: Endrowednes Kuantama, Dan Craciun, Ioan Tarca and Radu Tarcanguyễn namNo ratings yet
- Nguyen Tung Duong: ContactDocument4 pagesNguyen Tung Duong: Contactnguyễn namNo ratings yet
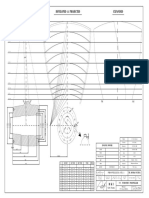
- Drawing 4D 1870mm (REV) TB. Bomas Surya (LH) (NEW TIMOTHY PROPELLER 2020)Document1 pageDrawing 4D 1870mm (REV) TB. Bomas Surya (LH) (NEW TIMOTHY PROPELLER 2020)Alan Sebastian100% (1)
- Optimal Earth Moon Trajectories Using Nuclear Electric PropulsionDocument7 pagesOptimal Earth Moon Trajectories Using Nuclear Electric PropulsionpclaudeNo ratings yet
- 2015 BK Price CatalogDocument97 pages2015 BK Price CatalogDildar AlamNo ratings yet
- Astra SealingDocument3 pagesAstra SealingIdehen KelvinNo ratings yet
- Enclosure A: User Defined Functions For ANSYS Fluent Define - Sdof - PropertiesDocument13 pagesEnclosure A: User Defined Functions For ANSYS Fluent Define - Sdof - PropertiesbentalebNo ratings yet
- AAF SCIENTIFIC ADVISORY GROUP Technical Intelligence Supplement - VKarman - V3Document186 pagesAAF SCIENTIFIC ADVISORY GROUP Technical Intelligence Supplement - VKarman - V3Paul D CarrierNo ratings yet
- EBOSDocument2 pagesEBOSlins_edNo ratings yet
- Datasheet enDocument1 pageDatasheet enTherese DoNo ratings yet
- Mig-21 Bis Manual v1.3.0Document25 pagesMig-21 Bis Manual v1.3.0S L Raghunath mudhirajNo ratings yet
- Ground Support Equipment CatalogDocument1 pageGround Support Equipment CatalogpeterNo ratings yet
- Fluid QuestionDocument20 pagesFluid Questionsaini_sainiNo ratings yet
- Glossary of Suspension Terms PDFDocument10 pagesGlossary of Suspension Terms PDFrobinNo ratings yet
- Assignment Brief For Learners & Feedback FormDocument13 pagesAssignment Brief For Learners & Feedback FormRishi Porwal100% (1)
- Seismic & Wind Analysis of BridgesDocument21 pagesSeismic & Wind Analysis of BridgesAbera MamoNo ratings yet
- How Airplanes FlyDocument15 pagesHow Airplanes Flymehul da aviatorNo ratings yet
- Bat Bot (B2) A Flying Inspired Machine Robot PDFDocument35 pagesBat Bot (B2) A Flying Inspired Machine Robot PDFBilal BilalNo ratings yet
- AutoDocument5 pagesAutohem1980No ratings yet
- MODEL 182/T182: Operation IntervalDocument1 pageMODEL 182/T182: Operation IntervalRuben Shock100% (1)
- TCDS EASA - IM - .A.090 - PA34-220T - Issue 7Document15 pagesTCDS EASA - IM - .A.090 - PA34-220T - Issue 7Anggarda Bagus SejatiNo ratings yet
- Chicago MapDocument1 pageChicago MapfaltadeingenieríaNo ratings yet
- CL 604-Ice and Rain ProtectionDocument20 pagesCL 604-Ice and Rain ProtectionJamesNo ratings yet
- Comanche Flyer 112008Document52 pagesComanche Flyer 112008robk182No ratings yet
- Cas 67 TCAS IIDocument4 pagesCas 67 TCAS IIMarcus DragoNo ratings yet
- Practice ProjectileDocument4 pagesPractice Projectilealdperry64No ratings yet
- Rotor Clip Catalog PDFDocument276 pagesRotor Clip Catalog PDFouribesanzNo ratings yet
- Conner - (1997-ARTICLE) Nonlinear Behavior of A Typical Airfoil Section With Control Surface FreeplayDocument21 pagesConner - (1997-ARTICLE) Nonlinear Behavior of A Typical Airfoil Section With Control Surface Freeplayguto__aeroNo ratings yet
- Copper AlloysDocument4 pagesCopper AlloysBookMaggotNo ratings yet
- Classical Mechanics Notes (6 of 10)Document18 pagesClassical Mechanics Notes (6 of 10)OmegaUserNo ratings yet
- Aero 483 - Space System DesignDocument2 pagesAero 483 - Space System DesignhmtuanbkNo ratings yet
- Motorcycle Carburator Theory and TuningDocument5 pagesMotorcycle Carburator Theory and TuningRubisel Guillen EsparzaNo ratings yet