You might also like
- Progress in Sustainable Development: Sustainable Engineering PracticesFrom EverandProgress in Sustainable Development: Sustainable Engineering PracticesDavid S-K. TingNo ratings yet
- Comprehensive Guide to Heterogeneous NetworksFrom EverandComprehensive Guide to Heterogeneous NetworksKiran AhujaNo ratings yet
- AEAT 12 2012 0241originalDocument10 pagesAEAT 12 2012 0241originalOSCAR EFREN CUEVA CAJAMARCANo ratings yet
- 11 Economicdesignandoptimizationof PDFDocument26 pages11 Economicdesignandoptimizationof PDFKing HenryNo ratings yet
- PFEenglishversion 2020Document120 pagesPFEenglishversion 2020CHEIKH ALIOU SOUANENo ratings yet
- Autonomous Vehicles On The EdgeDocument32 pagesAutonomous Vehicles On The EdgeNazmus SaquibNo ratings yet
- Engineering Insight Into Design and Testing of Aircraft Engine ComponentsDocument2 pagesEngineering Insight Into Design and Testing of Aircraft Engine ComponentsTomble BravoNo ratings yet
- An Iot Based School Bus Tracking and Monitoring System: July 2016Document11 pagesAn Iot Based School Bus Tracking and Monitoring System: July 2016Manikanta StudioNo ratings yet
- Modeling and Optimization of A Compression Ignition Engine Fueled With Biodiesel Blends For Performance ImprovementDocument30 pagesModeling and Optimization of A Compression Ignition Engine Fueled With Biodiesel Blends For Performance Improvementshreshthagandhi13No ratings yet
- CPD Credit Point 0.5: Research Paper Writing (From Writing To Publication)Document2 pagesCPD Credit Point 0.5: Research Paper Writing (From Writing To Publication)Akhmad MukhtarNo ratings yet
- Pub 022018Document8 pagesPub 022018Himadri Shekhar VermaNo ratings yet
- Ieee Itss Best Phd. Dissertation AwardDocument4 pagesIeee Itss Best Phd. Dissertation AwardCollegePaperWritingServiceReviewsSingapore100% (1)
- Project Report PDFDocument101 pagesProject Report PDFSuvodip DasNo ratings yet
- Virtual International Conference On Recent Advances in Manufacturing Engineering Research (ICRAMER 2021)Document8 pagesVirtual International Conference On Recent Advances in Manufacturing Engineering Research (ICRAMER 2021)SaravananNo ratings yet
- Development of Low Particle Emission Brake RotorsDocument162 pagesDevelopment of Low Particle Emission Brake RotorsAlemayehu MideksaNo ratings yet
- Scholarship at Uwindsor Scholarship at UwindsorDocument171 pagesScholarship at Uwindsor Scholarship at UwindsorVenkata Sai Kumar PulimiNo ratings yet
- Journal of Association of Arab Universities For Tourism and Hospitality June 2008Document10 pagesJournal of Association of Arab Universities For Tourism and Hospitality June 2008Saja AhmedNo ratings yet
- Che Me Sor Ption 2024Document2 pagesChe Me Sor Ption 2024krunalgangawane85No ratings yet
- Study of Bu Et Powerplant and SubstationsDocument28 pagesStudy of Bu Et Powerplant and SubstationsDJ LovelyNo ratings yet
- Nwae'19 Contents: About Our InstitutionDocument2 pagesNwae'19 Contents: About Our Institutionajd.nanthakumarNo ratings yet
- Icset-: 21 International Conference On Science, Engineering & Technology (ICSET)Document3 pagesIcset-: 21 International Conference On Science, Engineering & Technology (ICSET)manish_shashikantNo ratings yet
- Icambe-2021 KvcetDocument4 pagesIcambe-2021 Kvcetrajan251221No ratings yet
- Economic Design and Optimization of Zeolite-Based Cumene Production PlantDocument26 pagesEconomic Design and Optimization of Zeolite-Based Cumene Production PlantLAURA LUC�A ATENCIA CASTILLONo ratings yet
- Design of A Control System For A Reconfigurable Engine Assembly LDocument100 pagesDesign of A Control System For A Reconfigurable Engine Assembly LAvinash KumarNo ratings yet
- Power Line Robotic Device For Overhead Line Inspection and MaintenanceDocument12 pagesPower Line Robotic Device For Overhead Line Inspection and Maintenancepassed outNo ratings yet
- StakeholderAnalysisAce Bs2016TaipeiDocument10 pagesStakeholderAnalysisAce Bs2016TaipeiBrian LukeNo ratings yet
- Vikas Gusain Color FormatDocument2 pagesVikas Gusain Color FormatVicky GusainNo ratings yet
- EQUIPO11-Analyzing The Interactions Among Factors Affecting Cloud Adoption For Software Testing - A Two-Stage ISM-ANN ApproachDocument30 pagesEQUIPO11-Analyzing The Interactions Among Factors Affecting Cloud Adoption For Software Testing - A Two-Stage ISM-ANN ApproachDaniel ManjarrezNo ratings yet
- CFD Bfia Leaflet Pccoe2013Document2 pagesCFD Bfia Leaflet Pccoe2013Santhosh LingappaNo ratings yet
- Summer Internship Report (MBA)Document35 pagesSummer Internship Report (MBA)ShivamNo ratings yet
- 572 PPDocument8 pages572 PPGyanendra GavelNo ratings yet
- International Conference ON Automation, Computational and Technology ManagementDocument2 pagesInternational Conference ON Automation, Computational and Technology ManagementUma SNo ratings yet
- CoE Express 2016Document30 pagesCoE Express 2016jchs2880No ratings yet
- Call For PapersDocument1 pageCall For PapersmohamedNo ratings yet
- Sandip Final DissertDocument48 pagesSandip Final DissertRamdas DalviNo ratings yet
- Simulation by Abaqus FWDDocument104 pagesSimulation by Abaqus FWDSidhuRamNo ratings yet
- Sponsorship Certificate About The College National Workshop: Govt. Engineering College AjmerDocument2 pagesSponsorship Certificate About The College National Workshop: Govt. Engineering College AjmerVinodVermaNo ratings yet
- FYP Report Format - F15Document38 pagesFYP Report Format - F15Funny VideosNo ratings yet
- A Stakeholder Analysis of The Klia2 Airport Terminal ProjectDocument10 pagesA Stakeholder Analysis of The Klia2 Airport Terminal ProjectAlberto VillagomezNo ratings yet
- About The Programme Eligibility: AICTE Training and Learning (ATAL)Document2 pagesAbout The Programme Eligibility: AICTE Training and Learning (ATAL)DigvijayNo ratings yet
- Ic3iot 2024 Brouchure-TamizhDocument6 pagesIc3iot 2024 Brouchure-Tamizhcallmesam973No ratings yet
- School of Mechanical & Manufacturing Engineering, (SMME), IslamabadDocument14 pagesSchool of Mechanical & Manufacturing Engineering, (SMME), IslamabadTalal JameelNo ratings yet
- Program Sydney2022Document63 pagesProgram Sydney2022Pringgo Widyo LaksonoNo ratings yet
- National Conference Brochure 2017Document3 pagesNational Conference Brochure 2017skdwarakanathNo ratings yet
- Study of BUET Power Plant and Substations: April 2017Document28 pagesStudy of BUET Power Plant and Substations: April 2017Sadman ShakinNo ratings yet
- Important ThesisDocument331 pagesImportant ThesisVenkatesan SwamyNo ratings yet
- Final Report Hiss HREUpdatedDocument100 pagesFinal Report Hiss HREUpdatedYukesh KarkiNo ratings yet
- Flow Forming Optimization Based On Diametral Growth Using Finite Element Method and Response Surface MethodologyDocument13 pagesFlow Forming Optimization Based On Diametral Growth Using Finite Element Method and Response Surface MethodologyThejus RamachandranNo ratings yet
- Economic Design and Optimization of Zeolite-Based Cumene Production PlantDocument26 pagesEconomic Design and Optimization of Zeolite-Based Cumene Production PlantMadré JagersNo ratings yet
- NTCC Final Report 2Document15 pagesNTCC Final Report 2Rohan Pratap SinghNo ratings yet
- OPTIMIZING The Efficiency of A Gasoline Engine, by The On-Board Production of HHO Gas1Document2 pagesOPTIMIZING The Efficiency of A Gasoline Engine, by The On-Board Production of HHO Gas1Nam stareNo ratings yet
- Generator DesignDocument9 pagesGenerator Designmain_ziaNo ratings yet
- Guidance of Competitive Examination 2020 21Document14 pagesGuidance of Competitive Examination 2020 21Akhil ChandraNo ratings yet
- Economic Design and Optimization of Zeolite-Based Cumene Production PlantDocument26 pagesEconomic Design and Optimization of Zeolite-Based Cumene Production PlantVatsal KardaniNo ratings yet
- Icecream119 124Document279 pagesIcecream119 124THIRU RKNo ratings yet
- ICFD10 Conference ProgramDocument46 pagesICFD10 Conference ProgramSamy El-BeheryNo ratings yet
- CV - DR SajjadDocument9 pagesCV - DR SajjadSyedSajjadHussainNo ratings yet
- Rapid Prototyping For Assembly Training and Validation: Ifac-Papersonline May 2015Document7 pagesRapid Prototyping For Assembly Training and Validation: Ifac-Papersonline May 2015Arnav KetkarNo ratings yet
- A Deep Review and Analysis of Data Exchange in Vehicle-to-Vehicle Communications Systems: Coherent Taxonomy, Challenges, Motivations, Recommendations, Substantial Analysis and Futu..Document31 pagesA Deep Review and Analysis of Data Exchange in Vehicle-to-Vehicle Communications Systems: Coherent Taxonomy, Challenges, Motivations, Recommendations, Substantial Analysis and Futu..GGvrNo ratings yet
- Mohammed Akram - CPCDocument3 pagesMohammed Akram - CPCأحمد خيرالدين عليNo ratings yet
- Belts and Rope DrivesDocument40 pagesBelts and Rope DrivesAndrey MantaNo ratings yet
- Eea 58 3 2010 091 EN LP 000 PDFDocument5 pagesEea 58 3 2010 091 EN LP 000 PDFAndrey MantaNo ratings yet
- 24 Ianuarie S.A.: Buletin de Examinare A Duritatii SudurilorDocument2 pages24 Ianuarie S.A.: Buletin de Examinare A Duritatii SudurilorAndrey MantaNo ratings yet
- Electric Motorcycle's Battery Construction: October 2018Document8 pagesElectric Motorcycle's Battery Construction: October 2018Andrey MantaNo ratings yet
- Wevj 06 01136Document8 pagesWevj 06 01136Andrey MantaNo ratings yet
- Conventional Ic Engine To BLDC Powered Electric Motorcycle Conversion E MotorcycleDocument6 pagesConventional Ic Engine To BLDC Powered Electric Motorcycle Conversion E MotorcycleAndrey MantaNo ratings yet
- Eco Hybrid Scooter: Advanced Materials Research December 2014Document9 pagesEco Hybrid Scooter: Advanced Materials Research December 2014Andrey MantaNo ratings yet
- SUCO Catalog Clutches and Brakes 1Document44 pagesSUCO Catalog Clutches and Brakes 1Andrey MantaNo ratings yet
- HPM96 10000Document1 pageHPM96 10000Andrey MantaNo ratings yet
- Design and Development of A Drive System IntegrateDocument8 pagesDesign and Development of A Drive System IntegrateAndrey MantaNo ratings yet
- Design of A Compact Dual-Purpose Starting Clutch IDocument6 pagesDesign of A Compact Dual-Purpose Starting Clutch IAndrey MantaNo ratings yet
- PREZENTARE UPG PLOIESTI - 29 - 04 - 2021 (1) IrinaDocument40 pagesPREZENTARE UPG PLOIESTI - 29 - 04 - 2021 (1) IrinaAndrey MantaNo ratings yet
- Highlights ASME Guides Preheat PWHT IDocument4 pagesHighlights ASME Guides Preheat PWHT IArul Edwin Vijay VincentNo ratings yet
- Ultracold Atoms SlidesDocument49 pagesUltracold Atoms SlideslaubbaumNo ratings yet
- PlateNo 1Document7 pagesPlateNo 1Franz Anfernee Felipe GenerosoNo ratings yet
- Colfax MR Series CompresorDocument2 pagesColfax MR Series CompresorinvidiuoNo ratings yet
- Immunity Question Paper For A Level BiologyDocument2 pagesImmunity Question Paper For A Level BiologyJansi Angel100% (1)
- Pubb-0589-L-Rock-mass Hydrojacking Risk Related To Pressurized Water TunnelsDocument10 pagesPubb-0589-L-Rock-mass Hydrojacking Risk Related To Pressurized Water Tunnelsinge ocNo ratings yet
- John DrydenDocument3 pagesJohn DrydenDunas SvetlanaNo ratings yet
- Job Satisfaction VariableDocument2 pagesJob Satisfaction VariableAnagha Pawar - 34No ratings yet
- Module 6 Metal Properties and Destructive TestingDocument46 pagesModule 6 Metal Properties and Destructive TestingMiki Jaksic100% (6)
- 4th Sept - Marathon Series Lecture 8 - General AwarenessDocument208 pages4th Sept - Marathon Series Lecture 8 - General AwarenessManbir ArinNo ratings yet
- Sample CVFormat 1Document2 pagesSample CVFormat 1subham.sharmaNo ratings yet
- Note!: Rear Shock Absorber For YAMAHA N-MAXDocument4 pagesNote!: Rear Shock Absorber For YAMAHA N-MAXAdityaArnas0% (1)
- GPP Calendar of Activities 2022 23 SdoDocument5 pagesGPP Calendar of Activities 2022 23 SdoRomel GarciaNo ratings yet
- Hockney-Falco Thesis: 1 Setup of The 2001 PublicationDocument6 pagesHockney-Falco Thesis: 1 Setup of The 2001 PublicationKurayami ReijiNo ratings yet
- Python in Hidrology BookDocument153 pagesPython in Hidrology BookJuan david Gonzalez vasquez100% (1)
- 25 Middlegame Concepts Every Chess Player Must KnowDocument2 pages25 Middlegame Concepts Every Chess Player Must KnowKasparicoNo ratings yet
- Dutch Iris Eng 9734 HappyPattyCrochetDocument68 pagesDutch Iris Eng 9734 HappyPattyCrochetFrancisca Rico100% (6)
- Crypto Wall Crypto Snipershot OB Strategy - Day Trade SwingDocument29 pagesCrypto Wall Crypto Snipershot OB Strategy - Day Trade SwingArete JinseiNo ratings yet
- 02 Object Modeling TechniqueDocument50 pages02 Object Modeling TechniqueMuhammad Romadhon Batukarang EsdNo ratings yet
- Unit 1 Module 3 Rep in PlantsDocument26 pagesUnit 1 Module 3 Rep in Plantstamesh jodhanNo ratings yet
- ABARI-Volunteer Guide BookDocument10 pagesABARI-Volunteer Guide BookEla Mercado0% (1)
- Pathogenic Escherichia Coli Associated With DiarrheaDocument7 pagesPathogenic Escherichia Coli Associated With DiarrheaSiti Fatimah RadNo ratings yet
- PM Jobs Comp Ir RandDocument9 pagesPM Jobs Comp Ir Randandri putrantoNo ratings yet
- VimDocument258 pagesVimMichael BarsonNo ratings yet
- Borges, The SouthDocument4 pagesBorges, The Southdanielg233100% (1)
- 3D Printing & Embedded ElectronicsDocument7 pages3D Printing & Embedded ElectronicsSantiago PatitucciNo ratings yet
- Lodge at The Ancient City Information Kit / Great ZimbabweDocument37 pagesLodge at The Ancient City Information Kit / Great ZimbabwecitysolutionsNo ratings yet
- Sla At&tDocument2 pagesSla At&tCésar Lainez Lozada TorattoNo ratings yet
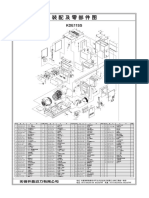
- KDE11SSDocument2 pagesKDE11SSluisgomezpasion1No ratings yet
- PDFDocument27 pagesPDFER Saurabh KatariyaNo ratings yet