You might also like
- MSBTE JAVA 9113 Question PaperDocument10 pagesMSBTE JAVA 9113 Question PaperManoj KavediaNo ratings yet
- Model QP - MPMC Lab - Wo Split UpDocument3 pagesModel QP - MPMC Lab - Wo Split Upsujaganesan20090% (1)
- CS8591 CN Lecture Plan FormatDocument5 pagesCS8591 CN Lecture Plan FormataddssdfaNo ratings yet
- IP versions 0-5 and socket programming exercisesDocument6 pagesIP versions 0-5 and socket programming exercisesS Sam100% (1)
- Bird Species Identification Using Deep LearningDocument74 pagesBird Species Identification Using Deep LearningaslanNo ratings yet
- Run Length Encoding and DecodingDocument3 pagesRun Length Encoding and DecodingDaniel SimanjuntakNo ratings yet
- Opencv Interview QuestionsDocument3 pagesOpencv Interview QuestionsYogesh YadavNo ratings yet
- Python Final Exam With Answer KeyDocument4 pagesPython Final Exam With Answer KeyAl Marjorie Abrasaldo TatingNo ratings yet
- Question Paper For JTO Phase-I Data Communication: Fill in The Blanks/ Short Answer questions/True/False TypeDocument3 pagesQuestion Paper For JTO Phase-I Data Communication: Fill in The Blanks/ Short Answer questions/True/False Typerockingprad6066No ratings yet
- Computer Network Module 2Document160 pagesComputer Network Module 2shakti139No ratings yet
- Application of 8051 MicrocontrollerDocument8 pagesApplication of 8051 MicrocontrollerSuraj Kumar100% (1)
- CS2259 Set1Document3 pagesCS2259 Set1Mohanaprakash EceNo ratings yet
- Robot Applications: AssemblyDocument17 pagesRobot Applications: Assemblyأحمد دعبسNo ratings yet
- Information Theory & Source CodingDocument14 pagesInformation Theory & Source CodingmarxxNo ratings yet
- Text To Speech Conversion in MATLAB. Access Speech Properties of Windows From MATLAB. - ProgrammerworldDocument1 pageText To Speech Conversion in MATLAB. Access Speech Properties of Windows From MATLAB. - ProgrammerworldamanNo ratings yet
- Tutorial Basic of C++ Lesson 1 enDocument7 pagesTutorial Basic of C++ Lesson 1 enqrembiezsNo ratings yet
- Computer Network Module 1Document205 pagesComputer Network Module 1shakti139No ratings yet
- EC3251 Circuit AnalysisDocument11 pagesEC3251 Circuit AnalysisBharath PonNo ratings yet
- Image Enhancement: Images Courtesy: Digital Image Processing FOURTH EDITION, Rafael C. Gonzalez - Richard E. WoodsDocument130 pagesImage Enhancement: Images Courtesy: Digital Image Processing FOURTH EDITION, Rafael C. Gonzalez - Richard E. Woodskparisa05No ratings yet
- Embedded Systems Mid Term Exam QuestionsDocument1 pageEmbedded Systems Mid Term Exam QuestionsMONTYNo ratings yet
- C&NS Lab Manual 2021Document64 pagesC&NS Lab Manual 2021nawal 109No ratings yet
- MCQ ON - Chapter 1 - Artificial Intelligence (AI)Document18 pagesMCQ ON - Chapter 1 - Artificial Intelligence (AI)Adinath Baliram ShelkeNo ratings yet
- PolymorphismDocument26 pagesPolymorphismRoshan ShawNo ratings yet
- Assignment 1Document4 pagesAssignment 1Kibrom HaftuNo ratings yet
- Code 5 Diffie Hellman Key ExchangeDocument6 pagesCode 5 Diffie Hellman Key ExchangeMuthuselvan Thillairajan100% (1)
- Introduction to Essential Image Processing ConceptsDocument39 pagesIntroduction to Essential Image Processing ConceptsawaraNo ratings yet
- Unit 1Document12 pagesUnit 1Pranjul Kushwaha100% (1)
- Unit 1Document45 pagesUnit 1Abhishek Bose100% (2)
- Representing Multimedia Information DigitallyDocument30 pagesRepresenting Multimedia Information DigitallyNeil LewisNo ratings yet
- UNIT IV - Part 5: IOT Platforms Design MethodologyDocument16 pagesUNIT IV - Part 5: IOT Platforms Design MethodologySankalpRai100% (1)
- Dip Assignment Questions Unit-1Document8 pagesDip Assignment Questions Unit-1OMSAINATH MPONLINENo ratings yet
- Performance Analysis of Wired, Wireless and Optical Network Using NS2Document7 pagesPerformance Analysis of Wired, Wireless and Optical Network Using NS2Editor IJRITCCNo ratings yet
- A Survey of Evolution of Image Captioning PDFDocument18 pagesA Survey of Evolution of Image Captioning PDF_mboNo ratings yet
- B.tech CS S8 High Performance Computing Module Notes Module 1Document19 pagesB.tech CS S8 High Performance Computing Module Notes Module 1Jisha Shaji100% (1)
- IT1352 Cryptography and Network SecurityDocument29 pagesIT1352 Cryptography and Network SecurityVishnupriya OmprakashNo ratings yet
- Qustionbank1 12Document40 pagesQustionbank1 12Bhaskar VeeraraghavanNo ratings yet
- LabVIEW PPT PresentationDocument27 pagesLabVIEW PPT PresentationRanadeep DeyNo ratings yet
- Traffic Sign Board Recognition and Voice Alert System Using Convolutional Neural NetworkDocument1 pageTraffic Sign Board Recognition and Voice Alert System Using Convolutional Neural NetworkWebsoft Tech-HydNo ratings yet
- StrelDocument17 pagesStrelAhmad BasNo ratings yet
- DACDocument14 pagesDACsharadaNo ratings yet
- WinRunner For BeginnersDocument62 pagesWinRunner For BeginnersMadhan RajNo ratings yet
- An Isolated LAN Connecting 12 Computers To A Hub in A ClosetDocument11 pagesAn Isolated LAN Connecting 12 Computers To A Hub in A ClosetveNo ratings yet
- Cse SarDocument227 pagesCse Sarabhi00722No ratings yet
- Embedded System Design Concepts: Characteristics & Quality Attributes of Embedded SystemsDocument27 pagesEmbedded System Design Concepts: Characteristics & Quality Attributes of Embedded SystemsAzeem Top100% (1)
- Mobile Ad Hoc Networks PrintoutsDocument38 pagesMobile Ad Hoc Networks PrintoutsSHADDOWWNo ratings yet
- Answers 3Document5 pagesAnswers 3Carl SigaNo ratings yet
- Lecture 1 - IntroductionDocument6 pagesLecture 1 - IntroductionAndrei BâcuNo ratings yet
- Solution ManualDocument30 pagesSolution ManualKristin Dikiciyan100% (1)
- Wireless Lab - Packet TracerDocument4 pagesWireless Lab - Packet Tracermirzasoroush67No ratings yet
- Ktu SyllabusDocument87 pagesKtu SyllabusPratheesh BoseNo ratings yet
- EE8691 Embedded Systems NotesDocument76 pagesEE8691 Embedded Systems NotesMalik MubeenNo ratings yet
- AVR Microcontroller TestDocument9 pagesAVR Microcontroller TestNiranjan AgravatNo ratings yet
- Spatial Domain Image Processing)Document64 pagesSpatial Domain Image Processing)Getachew Yizengaw Enyew0% (1)
- DR Raj Kamal RTOSMobSystemDocument66 pagesDR Raj Kamal RTOSMobSystemShreelakshmi YRNo ratings yet
- Module 3 PPT 2Document14 pagesModule 3 PPT 2Simrandeep SinghNo ratings yet
- Plagiarism Scan Report: Content Checked For PlagiarismDocument4 pagesPlagiarism Scan Report: Content Checked For Plagiarismsjtatfz xykryajNo ratings yet
- Forest Fire Detection Using Computer VisionDocument30 pagesForest Fire Detection Using Computer VisionPRANAV KAKKARNo ratings yet
- Major-1 End SemDocument13 pagesMajor-1 End SemSejal GuptaNo ratings yet
- Vorovencii 2Document7 pagesVorovencii 2Hagamos un TruequeNo ratings yet
- FOrest Fire PrevetionDocument17 pagesFOrest Fire PrevetionsiddaramuNo ratings yet
- Building Smart Drones With ESP8266Document204 pagesBuilding Smart Drones With ESP8266popoyboy100% (4)
- A10 MissionReportDocument323 pagesA10 MissionReportMark SickleNo ratings yet
- Frequently asked questions for examinersDocument32 pagesFrequently asked questions for examinersGKTRKNo ratings yet
- Indian Airlines or Indian (: HistoryDocument30 pagesIndian Airlines or Indian (: HistoryAmar NathNo ratings yet
- Pia ReportDocument18 pagesPia ReportMuhammad Hassaan FarooqiNo ratings yet
- OEB 42-30 - Recommendations On OEB ManagementDocument6 pagesOEB 42-30 - Recommendations On OEB ManagementAndrey DanilchenkoNo ratings yet
- Multi-Engine Aircraft AerodynamicsDocument58 pagesMulti-Engine Aircraft AerodynamicsNishantNo ratings yet
- Indian Explosive Rules 2008Document163 pagesIndian Explosive Rules 2008sham7523100% (1)
- Service Letter: Hartzell Propeller IncDocument6 pagesService Letter: Hartzell Propeller IncLuis AbelleiraNo ratings yet
- Airports Q3 2015 Ground Safety Performance ReportDocument36 pagesAirports Q3 2015 Ground Safety Performance ReporthansNo ratings yet
- Math and word problems quiz with multiple choice and short answer questionsDocument9 pagesMath and word problems quiz with multiple choice and short answer questionsshahsxNo ratings yet
- Cessna Private Pilot CourseDocument29 pagesCessna Private Pilot CourseSulejman VaticNo ratings yet
- Services by Airbus PortfolioDocument77 pagesServices by Airbus PortfolioPablo RestrepoNo ratings yet
- AirworthinessDocument12 pagesAirworthinesssaravana kumarNo ratings yet
- VVCR ChartsDocument14 pagesVVCR ChartsDuy Anh0% (1)
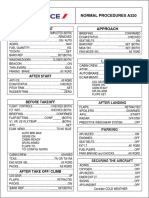
- Checklist AirFrance - A320 Normal Procedure 01Document1 pageChecklist AirFrance - A320 Normal Procedure 01nathanvinted91No ratings yet
- Power Supply Networks For The Airport LED Lights Systems: Radim BloudicekDocument5 pagesPower Supply Networks For The Airport LED Lights Systems: Radim BloudicekKadek Ita RosianaNo ratings yet
- X AeroDocument497 pagesX Aeroborchec100% (1)
- 1.load CalculationDocument5 pages1.load Calculationvel suriyaNo ratings yet
- Moments QPDocument15 pagesMoments QPSam AshcroftNo ratings yet
- CE 318 Structure Analysis and Design Ii LabDocument11 pagesCE 318 Structure Analysis and Design Ii LabMd. Murshedul Islam 173-47-091No ratings yet
- Aerodynamic Design of Rocket Launchers To Reduce DragDocument9 pagesAerodynamic Design of Rocket Launchers To Reduce DragAntonella EscalanteNo ratings yet
- Korda's Dethermalizer - A Free-Flight Model AirplaneDocument6 pagesKorda's Dethermalizer - A Free-Flight Model AirplaneBob KowalskiNo ratings yet
- Special Course On Engineering Methods in Aerodynamic Analysis and Design of AircraftDocument249 pagesSpecial Course On Engineering Methods in Aerodynamic Analysis and Design of AircraftAres SerranoNo ratings yet
- BOLTS (New Section) 972Document6 pagesBOLTS (New Section) 972Nisa_nisheNo ratings yet
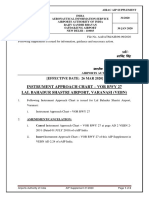
- AIP SUP VOR RWY 27 VARANASIDocument2 pagesAIP SUP VOR RWY 27 VARANASIPiyush MankaniNo ratings yet
- Check Engine Timing Marks Lycoming Direct Drive EnginesDocument3 pagesCheck Engine Timing Marks Lycoming Direct Drive EnginesFernando Moreira100% (2)
- Job Description of Atco: M Hammad AhmadDocument3 pagesJob Description of Atco: M Hammad AhmadHammad AhmadNo ratings yet
- 85 119Document562 pages85 119Ayrton NobileNo ratings yet
- ME-321 Aerospace Propulsion Problems Turboprop Engine CalculationsDocument1 pageME-321 Aerospace Propulsion Problems Turboprop Engine CalculationsMuhammad JamilNo ratings yet