You might also like
- TeachingWeek4 Further VectorsMatricesDocument38 pagesTeachingWeek4 Further VectorsMatricesknight riderNo ratings yet
- Topic 5 Linear Combination Linear Dependence Spanning, Orthogonal-WordDocument12 pagesTopic 5 Linear Combination Linear Dependence Spanning, Orthogonal-Wordwendykuria3No ratings yet
- Euler vs. Lagrange Representation:: Homework 4 Fluid MechanicsDocument5 pagesEuler vs. Lagrange Representation:: Homework 4 Fluid MechanicsSwathi BDNo ratings yet
- 6 Gram-Schmidt Procedure, QR-factorization, Orthog-Onal Projections, Least SquareDocument13 pages6 Gram-Schmidt Procedure, QR-factorization, Orthog-Onal Projections, Least SquareAna Paula RomeiraNo ratings yet
- Lect 6Document5 pagesLect 6Stallion WayzNo ratings yet
- Week-3 Session 1Document19 pagesWeek-3 Session 1Vinshi JainNo ratings yet
- Real Vector Spaces and SubspacesDocument23 pagesReal Vector Spaces and SubspacesMeetu KaurNo ratings yet
- 0 Short Review of Some Mathematics, Nomenclature and NotationDocument14 pages0 Short Review of Some Mathematics, Nomenclature and NotationWong Zam MingYinNo ratings yet
- Gibbs Annealing for Multiway Bayesian Linear RegressionsDocument8 pagesGibbs Annealing for Multiway Bayesian Linear RegressionsJohn ValjohnNo ratings yet
- MATH101 7 Vector SpacesDocument34 pagesMATH101 7 Vector SpacesSalvacion BandoyNo ratings yet
- MATH2023 Multivariable Calculus Chapter 6 Vector Calculus L2/L3 (Fall 2019)Document40 pagesMATH2023 Multivariable Calculus Chapter 6 Vector Calculus L2/L3 (Fall 2019)物理系小薯No ratings yet
- Linear Independence: Wei-Ta ChuDocument39 pagesLinear Independence: Wei-Ta Chunizad dardNo ratings yet
- Homework 1Document5 pagesHomework 1Stacy TashNo ratings yet
- GagagDocument8 pagesGagagWorse To Worst SatittamajitraNo ratings yet
- MATH 4330 HW 1 CorrectedDocument3 pagesMATH 4330 HW 1 Corrected10802117No ratings yet
- FEM - Solid - Mechanics - 2022-2023Document52 pagesFEM - Solid - Mechanics - 2022-2023houda houbanNo ratings yet
- 2024-02-20 MA110 Slides CompilationDocument62 pages2024-02-20 MA110 Slides CompilationmayankspareNo ratings yet
- Lecture 9Document37 pagesLecture 9Aya ZaiedNo ratings yet
- Article Hourglass Energy.3.9.03Document10 pagesArticle Hourglass Energy.3.9.03Stamin StefanNo ratings yet
- Vvedensky D.-Group Theory, Problems and Solutions (2005)Document94 pagesVvedensky D.-Group Theory, Problems and Solutions (2005)egmont7No ratings yet
- Numerical Analysis Assignment HelpDocument15 pagesNumerical Analysis Assignment HelpMath Homework SolverNo ratings yet
- AlgcombDocument6 pagesAlgcombSanjeev Kumar DasNo ratings yet
- Spanning Sets and Linear Independence: NontrivialDocument10 pagesSpanning Sets and Linear Independence: Nontrivialankita patelNo ratings yet
- LA-W1lineer AlgDocument22 pagesLA-W1lineer Algkaan karaaliNo ratings yet
- Chapter 7 Systems of Nonlinear Diffe 2021 A Modern Introduction To DiffereDocument60 pagesChapter 7 Systems of Nonlinear Diffe 2021 A Modern Introduction To DiffereLJ AuNo ratings yet
- Graph Draw NotesDocument10 pagesGraph Draw NotesGuifré Sánchez SerraNo ratings yet
- Chapter 5Document25 pagesChapter 5Omed. HNo ratings yet
- MIT8 04S16 ps6 2016Document5 pagesMIT8 04S16 ps6 2016Sagar SwarupNo ratings yet
- Lyapunov functions reveal global stabilityDocument8 pagesLyapunov functions reveal global stabilitykamalulwafiNo ratings yet
- Sma Oscillations127Document16 pagesSma Oscillations127JacecosmozNo ratings yet
- Hyperbolic Relaxation of a Fourth Order Evolution EquationDocument12 pagesHyperbolic Relaxation of a Fourth Order Evolution EquationZulma QuispeNo ratings yet
- MA412 FinalDocument82 pagesMA412 FinalAhmad Zen FiraNo ratings yet
- Linear AlgebraDocument68 pagesLinear AlgebraParvesh BairagiNo ratings yet
- Classification and Applications of Monomial Orderings and The Properties of Differential OrderingsDocument16 pagesClassification and Applications of Monomial Orderings and The Properties of Differential OrderingsSucram Suintop SunisocNo ratings yet
- Echelon Form of A MatrixDocument41 pagesEchelon Form of A MatrixJinky CanitanNo ratings yet
- Matrix and Determinant PropertiesDocument42 pagesMatrix and Determinant PropertiesPrakatanam PrakatanamNo ratings yet
- رياضياتDocument15 pagesرياضياتem2200139No ratings yet
- Vectors Notes IDocument14 pagesVectors Notes IJpricarioNo ratings yet
- Chapter Foure Vector Space: Asma Alramle November 21, 2020Document8 pagesChapter Foure Vector Space: Asma Alramle November 21, 2020Esmaeil AlkhazmiNo ratings yet
- Honours Algebra 2 Assignment 1 Matrix BasisDocument9 pagesHonours Algebra 2 Assignment 1 Matrix Basisdavid1562008100% (1)
- Introduction To Continuum Mechanics Lecture Notes: Jagan M. PadbidriDocument26 pagesIntroduction To Continuum Mechanics Lecture Notes: Jagan M. PadbidriAshmilNo ratings yet
- Hadiji Benh 2023Document22 pagesHadiji Benh 2023mmoetez2011No ratings yet
- A Closer Look at Sparse Regression Ryan Tibshirani: 2.1 Three Norms: ', ', 'Document25 pagesA Closer Look at Sparse Regression Ryan Tibshirani: 2.1 Three Norms: ', ', 'SNo ratings yet
- Introduction To Continuum Mechanics Lecture Notes: Jagan M. PadbidriDocument33 pagesIntroduction To Continuum Mechanics Lecture Notes: Jagan M. Padbidrivishnu rajuNo ratings yet
- WEEK 5 - Vector Space, SubspaceDocument28 pagesWEEK 5 - Vector Space, Subspacemira_stargirlsNo ratings yet
- PenroseDocument7 pagesPenroseAngelika ErhardtNo ratings yet
- Vector Space ExamplesDocument81 pagesVector Space ExamplesShubhaNo ratings yet
- CH3 Vector CalculusDocument39 pagesCH3 Vector CalculusAfie Fahry AdzmiNo ratings yet
- Paper: Nanoscience and Nanotechnology Unit-1: Module-3: 1. Particle in A BoxDocument12 pagesPaper: Nanoscience and Nanotechnology Unit-1: Module-3: 1. Particle in A BoxPRATEEKSHA TRIPATHINo ratings yet
- Simon and BlumeDocument14 pagesSimon and BlumegottsstrNo ratings yet
- Unique - Solution MatriksDocument4 pagesUnique - Solution MatriksMasyitah FitridaNo ratings yet
- Linear ProgrammingDocument28 pagesLinear ProgrammingRaka SubiNo ratings yet
- 4115 Troyou06Document20 pages4115 Troyou06dibekayaNo ratings yet
- 2.2 Linear Algebra & GeometryDocument16 pages2.2 Linear Algebra & GeometryRajaNo ratings yet
- Chap 2Document7 pagesChap 2劉柏賢No ratings yet
- ch03 - Part2 - RealVector v2 (42) - DONEDocument42 pagesch03 - Part2 - RealVector v2 (42) - DONEHsinminNo ratings yet
- Chapter 2 - Vector SpacesDocument19 pagesChapter 2 - Vector SpacesKiều Trần Nguyễn DiễmNo ratings yet
- Difference Equations in Normed Spaces: Stability and OscillationsFrom EverandDifference Equations in Normed Spaces: Stability and OscillationsNo ratings yet
- Covid-19 Positive Case List from July 1Document9 pagesCovid-19 Positive Case List from July 1louis donyNo ratings yet
- Road Cycling Race ManualDocument100 pagesRoad Cycling Race Manuallouis donyNo ratings yet
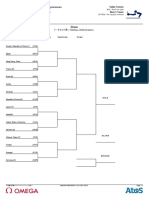
- Tokyo Metropolitan Gymnasium Table Tennis Men's Team: トーナメント表 / Tableau d'éliminationDocument1 pageTokyo Metropolitan Gymnasium Table Tennis Men's Team: トーナメント表 / Tableau d'éliminationlouis donyNo ratings yet
- New Base Metal Targets Identified at Balladonia Project - Fraser Range, WaDocument10 pagesNew Base Metal Targets Identified at Balladonia Project - Fraser Range, Walouis donyNo ratings yet
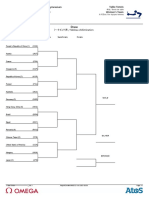
- Tokyo Metropolitan Gymnasium Table Tennis Women's Team: トーナメント表 / Tableau d'éliminationDocument1 pageTokyo Metropolitan Gymnasium Table Tennis Women's Team: トーナメント表 / Tableau d'éliminationlouis donyNo ratings yet
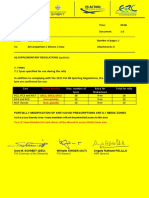
- Tyre update and media zone access changesDocument1 pageTyre update and media zone access changeslouis donyNo ratings yet
- Gas On Steel Hob, 90cm, Flush Fit: DimensionsDocument2 pagesGas On Steel Hob, 90cm, Flush Fit: Dimensionslouis donyNo ratings yet
- Characterisation of Geogrid and Waste Tyres As Reinforcement Materials in Railway Track BedsDocument16 pagesCharacterisation of Geogrid and Waste Tyres As Reinforcement Materials in Railway Track Bedslouis donyNo ratings yet
- Basic Vehicle Condition Guide: Seats Carpets Panels DashboardDocument1 pageBasic Vehicle Condition Guide: Seats Carpets Panels Dashboardlouis donyNo ratings yet
- Blake Summer Algebra BootcampDocument1 pageBlake Summer Algebra Bootcamplouis donyNo ratings yet
- M/s Ram Ayodhya Tyres Cutting HouseDocument4 pagesM/s Ram Ayodhya Tyres Cutting Houselouis donyNo ratings yet
- 500 Series - Fe 1426 HinoDocument4 pages500 Series - Fe 1426 Hinolouis donyNo ratings yet
- Price History: Tables and ChartsDocument16 pagesPrice History: Tables and Chartslouis donyNo ratings yet
- S&T Chain & Rigging Flyer - Jan 2021 WebDocument1 pageS&T Chain & Rigging Flyer - Jan 2021 Weblouis donyNo ratings yet
- Trimax NZ Catalogue - June 2020 EMAILDocument40 pagesTrimax NZ Catalogue - June 2020 EMAILlouis donyNo ratings yet
- Specification at A Glance: GeneralDocument2 pagesSpecification at A Glance: Generallouis donyNo ratings yet
- Gas On Steel Cooktop, 60cm: DimensionsDocument2 pagesGas On Steel Cooktop, 60cm: Dimensionslouis donyNo ratings yet
- BRANZ Facts Mid Rise 5 Steel CorrosionDocument3 pagesBRANZ Facts Mid Rise 5 Steel Corrosionlouis donyNo ratings yet
- Corrugated Metal Culverts - Durability in New Zealand ConditionsDocument3 pagesCorrugated Metal Culverts - Durability in New Zealand Conditionslouis donyNo ratings yet
- Argus Metal Prices: ContentsDocument29 pagesArgus Metal Prices: Contentslouis donyNo ratings yet
- Mathematics: On S-Evolution Algebras and Their Enveloping AlgebrasDocument23 pagesMathematics: On S-Evolution Algebras and Their Enveloping Algebraslouis donyNo ratings yet
- Infrastructures: Feasibility of Reusing Damaged Steel Beams in Temporary StructuresDocument24 pagesInfrastructures: Feasibility of Reusing Damaged Steel Beams in Temporary Structureslouis donyNo ratings yet
- Sheet Steel Door, Vertically Divided, Vented For DK-TS - DK 7824.380Document3 pagesSheet Steel Door, Vertically Divided, Vented For DK-TS - DK 7824.380louis donyNo ratings yet
- Project Controls Expo: Schedule MaturityDocument36 pagesProject Controls Expo: Schedule Maturitylouis donyNo ratings yet
- Buildings 11 00220Document18 pagesBuildings 11 00220louis donyNo ratings yet
- Material Selection Guide - MILD STEELDocument1 pageMaterial Selection Guide - MILD STEELlouis donyNo ratings yet
- Barrier Design GuidanceDocument75 pagesBarrier Design GuidancearchpavlovicNo ratings yet
- Subcontract Agreement: Project: Trade: Subcontractor: ReferenceDocument51 pagesSubcontract Agreement: Project: Trade: Subcontractor: Referencelouis donyNo ratings yet
- The Resource Management Maturity Model: A Guide To Defining and Executing An Effective Resource Management StrategyDocument24 pagesThe Resource Management Maturity Model: A Guide To Defining and Executing An Effective Resource Management Strategylouis donyNo ratings yet
- Robotics Chapter 3: Spatial Descriptions and TransformationsDocument31 pagesRobotics Chapter 3: Spatial Descriptions and TransformationsNguyễn Xuân TrườngNo ratings yet
- Solutions to exercises from Pavel Grinfeld's tensor analysis textDocument119 pagesSolutions to exercises from Pavel Grinfeld's tensor analysis textchoopo50% (2)
- Astronomy 3601 Homework #6 Metric Covariant DerivativeDocument2 pagesAstronomy 3601 Homework #6 Metric Covariant DerivativeDhruv SinghNo ratings yet
- Unit Normal VectorDocument0 pagesUnit Normal VectorgusgifNo ratings yet
- Definition and Models of Incidence GeometryDocument4 pagesDefinition and Models of Incidence GeometryDie A MuslimahNo ratings yet
- Fitzpatrick, Differential Forms and Vector CalculusDocument6 pagesFitzpatrick, Differential Forms and Vector CalculusΣωτήρης ΝτελήςNo ratings yet
- Solidworks - SurfacesDocument24 pagesSolidworks - SurfacesdvanhalenNo ratings yet
- Differential Calculus PDFDocument20 pagesDifferential Calculus PDFSINNAPPARAJ SNo ratings yet
- Math 55 directional derivatives gradientsDocument2 pagesMath 55 directional derivatives gradientsTidal SurgesNo ratings yet
- The Unit Tangent and The Unit Normal VectorsDocument5 pagesThe Unit Tangent and The Unit Normal VectorsRaj Vardhan PatelNo ratings yet
- Electromagnetic Field Tensor in Curvilinear CoordinatesDocument8 pagesElectromagnetic Field Tensor in Curvilinear CoordinatesAscanio BarbosaNo ratings yet
- Isometries and Isometric Isomorphisms in Metric SpacesDocument3 pagesIsometries and Isometric Isomorphisms in Metric SpacesRitesh DewanganNo ratings yet
- The Polar Moment of Inertia of The Enveloping CurveDocument4 pagesThe Polar Moment of Inertia of The Enveloping CurveRavindra Kumar SonwaniNo ratings yet
- Cartesian Coordinate SystemDocument4 pagesCartesian Coordinate SystemGabrielle Vince VillarbaNo ratings yet
- Physics 721: Problem Set No.1Document2 pagesPhysics 721: Problem Set No.1Mohamed Ayman MoshtohryNo ratings yet
- Kalkulus: IntegralDocument240 pagesKalkulus: Integralsvitri94No ratings yet
- Hodge DualDocument6 pagesHodge DualAnonymous L5SV7oWPNo ratings yet
- Marsden J.E. - Lectures On Mechanics (1992) PDFDocument233 pagesMarsden J.E. - Lectures On Mechanics (1992) PDFanon020202No ratings yet
- Divergence Theorem of Gauss-Lec-6Document9 pagesDivergence Theorem of Gauss-Lec-6aryanNo ratings yet
- Learning Activity Sheets-Pre Cal - (Week 1)Document2 pagesLearning Activity Sheets-Pre Cal - (Week 1)Dominic Dalton CalingNo ratings yet
- Ansys LearningDocument22 pagesAnsys Learningkishna009No ratings yet
- 7) C1 Differentiation QuestionsDocument17 pages7) C1 Differentiation QuestionsTimNo ratings yet
- Differential Geometry NotesDocument6 pagesDifferential Geometry NotesSanjeev ShuklaNo ratings yet
- HermiteDocument6 pagesHermiteKtk ZadNo ratings yet
- Implicit Differentiation and Tangent Lines Mathematica LabDocument2 pagesImplicit Differentiation and Tangent Lines Mathematica LabjcowNo ratings yet
- Geodiferencial 8 PDFDocument2 pagesGeodiferencial 8 PDFyordanNo ratings yet
- Polar Coordinates Packet 1Document20 pagesPolar Coordinates Packet 1rootveshmehtaNo ratings yet
- UNIT 5 Coordinate SystemsDocument8 pagesUNIT 5 Coordinate SystemsAgnihothra Sarma OrugantiNo ratings yet
- 212 Sample ChapterDocument30 pages212 Sample ChapterMahesh Raja100% (1)
- Floating Bodies in Neutral EquilibriumDocument5 pagesFloating Bodies in Neutral EquilibriumCarlos JoseNo ratings yet