You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- BCM Ford FocusDocument86 pagesBCM Ford FocusRomeo Belko50% (2)
- Indoor & Outdoor Lighting: Better Light ... Better LifeDocument44 pagesIndoor & Outdoor Lighting: Better Light ... Better Lifemorad omr100% (2)
- Hyundai D6GA Engine Mechanical System PDFDocument97 pagesHyundai D6GA Engine Mechanical System PDFbrayandparavicinoNo ratings yet
- BC500 Service ManualDocument45 pagesBC500 Service ManualWilson Rodriguez BustamanteNo ratings yet
- Filtering BasicsDocument83 pagesFiltering BasicsDikshitJainNo ratings yet
- Media Queries PDFDocument18 pagesMedia Queries PDFFernando SalazarNo ratings yet
- Bio BatteryDocument11 pagesBio BatteryGurubasamma LNo ratings yet
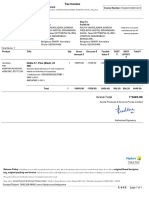
- Tax Invoice for Nokia 5.1 Plus MobileDocument1 pageTax Invoice for Nokia 5.1 Plus Mobilepunithrgowda22No ratings yet
- Chapter 9 Thin Film Deposition - IVDocument49 pagesChapter 9 Thin Film Deposition - IVRashmi RavindranathNo ratings yet
- JPx-SBRO-005-E TornatechDocument2 pagesJPx-SBRO-005-E TornatechIrcham MaulanaNo ratings yet
- GX Apendice CDocument4 pagesGX Apendice CDaniel NogueiraNo ratings yet
- Battery ModelsDocument7 pagesBattery ModelsPeter LauerNo ratings yet
- Product Sheet: Nibp100D Noninvasive Blood Pressure Monitoring SystemDocument3 pagesProduct Sheet: Nibp100D Noninvasive Blood Pressure Monitoring SystemSadegh ShebaniNo ratings yet
- M7996v1.1 Parte1Document8 pagesM7996v1.1 Parte1lakekosNo ratings yet
- Energus Power Solutions Ltd. BMS Firmware Release NotesDocument3 pagesEnergus Power Solutions Ltd. BMS Firmware Release NotesÁlvaro Satué CrespoNo ratings yet
- Invertor LCD MP1018Document1 pageInvertor LCD MP1018RenatoMaiaNo ratings yet
- Cataract User Guide WebDocument29 pagesCataract User Guide WebSalomonNo ratings yet
- Tetra Plex C10-ECO: Plate Heat ExchangerDocument2 pagesTetra Plex C10-ECO: Plate Heat ExchangerĐình KiênNo ratings yet
- Asia-Pacific Telecommunity Band Plan in The 700MHzDocument17 pagesAsia-Pacific Telecommunity Band Plan in The 700MHzGerardo JimenezNo ratings yet
- Comparison GPS GLONASS Galileo PLNRaju2Document38 pagesComparison GPS GLONASS Galileo PLNRaju2Saurabh SumanNo ratings yet
- DPSD - 2Document85 pagesDPSD - 2vinothvinozonsNo ratings yet
- Electric Contact Water Level Gauge, Water Level Electrode, DJM1615-87Detailed IntroductionDocument2 pagesElectric Contact Water Level Gauge, Water Level Electrode, DJM1615-87Detailed IntroductionAchmad Nuriel AnwarNo ratings yet
- Cme2100 Quick Manual English v.3.0 0Document59 pagesCme2100 Quick Manual English v.3.0 0mgugiNo ratings yet
- DTL Training Report Avnish KatiyarDocument71 pagesDTL Training Report Avnish KatiyarKuldip Singh75% (4)
- ST Link UtilityDocument11 pagesST Link UtilityAleixLNo ratings yet
- WEG w22 Three Phase Motor Technical Australia New Zealand Market 50025541 BR - Mo - W22technical Catalogue - BSC Brochure English PDFDocument40 pagesWEG w22 Three Phase Motor Technical Australia New Zealand Market 50025541 BR - Mo - W22technical Catalogue - BSC Brochure English PDFMohammad Mahdi BozorgzadehNo ratings yet
- Urc 7550Document40 pagesUrc 7550Jean HamiltonNo ratings yet
- Manual MI 2893, MI 2892, MI 2885 - PowerMaster XT, Power Master, Master Q4 ANG Ver 1.2.2 20753179Document242 pagesManual MI 2893, MI 2892, MI 2885 - PowerMaster XT, Power Master, Master Q4 ANG Ver 1.2.2 20753179Nhật Tân Nguyễn VănNo ratings yet
- Speech Enhancement Technical PaperDocument8 pagesSpeech Enhancement Technical PaperPuli BalajiNo ratings yet