You might also like
- Bmt437-Time Response AnalysisDocument35 pagesBmt437-Time Response Analysisharshasri89No ratings yet
- Time Response AnalysisDocument57 pagesTime Response AnalysisAbdelnasirNo ratings yet
- Tripoli University Department of Electrical & Electronic EngineeringDocument44 pagesTripoli University Department of Electrical & Electronic EngineeringtojogofirNo ratings yet
- Chapter 3: Dynamic ResponseDocument41 pagesChapter 3: Dynamic ResponseAhmedSalahNo ratings yet
- Time Domain Analysis of Control SystemDocument25 pagesTime Domain Analysis of Control SystemEti'el Films / ኢትኤል ፊልሞችNo ratings yet
- Unit 4: Time-Domain Analysis of Control SystemDocument18 pagesUnit 4: Time-Domain Analysis of Control SystemNasrullah YusupNo ratings yet
- Time Response AnalysisDocument43 pagesTime Response AnalysisAkmal IsnaeniNo ratings yet
- L5 To 7 Transient and Steady State ResponseDocument53 pagesL5 To 7 Transient and Steady State ResponseRaj PatelNo ratings yet
- Online Control Lecture #4Document33 pagesOnline Control Lecture #4Noor GamingNo ratings yet
- Transient Response Analysis of First and Second Order SystemsDocument26 pagesTransient Response Analysis of First and Second Order Systemsيوسف الأحمديNo ratings yet
- Lect 1Document30 pagesLect 1Sameh MostafaNo ratings yet
- Module 2 FullDocument67 pagesModule 2 FullRakshith HsNo ratings yet
- Introduction To Control System DesignDocument63 pagesIntroduction To Control System DesignisbetaaccountNo ratings yet
- Second Order SystemsDocument11 pagesSecond Order SystemsShashank BhagwatNo ratings yet
- Control Systems Characteristics and Transient Response (15B11EC613Document14 pagesControl Systems Characteristics and Transient Response (15B11EC613Rachit GuptaNo ratings yet
- Time Domain Analysis of Control SystemsDocument49 pagesTime Domain Analysis of Control Systemsanasmos danielNo ratings yet
- Chapter 3 - Time Response AnalysisDocument31 pagesChapter 3 - Time Response AnalysisANDREW LEONG CHUN TATT STUDENTNo ratings yet
- Lect 3 - Time Response PDFDocument27 pagesLect 3 - Time Response PDFGilang Noor LaksanaNo ratings yet
- Chapter5 130401031918 Phpapp01 PDFDocument34 pagesChapter5 130401031918 Phpapp01 PDFSiraj MohammedNo ratings yet
- Automatic Control Code: ELC 361: Lecture No. 5Document7 pagesAutomatic Control Code: ELC 361: Lecture No. 5abdo RahmanNo ratings yet
- Transient Response AnaDocument14 pagesTransient Response AnadivyangkapadiaNo ratings yet
- 1-Module3 - Time Domain AnalysisDocument12 pages1-Module3 - Time Domain AnalysisShashankaNo ratings yet
- Control Systems (EC 205, 3L + 1T)Document25 pagesControl Systems (EC 205, 3L + 1T)Abhishek RaiNo ratings yet
- PDPM: Time Domain Analysis of 1st and 2nd Order SystemsDocument7 pagesPDPM: Time Domain Analysis of 1st and 2nd Order SystemsMANOJ KUMAR DASNo ratings yet
- Time Response, ME451: Instructor: Jongeun ChoiDocument84 pagesTime Response, ME451: Instructor: Jongeun ChoiJpradha KamalNo ratings yet
- 6 Lecture Notes-6 BEM2053 EM218 - Additional NotesDocument20 pages6 Lecture Notes-6 BEM2053 EM218 - Additional NotesMuhammad Abdullah ImranNo ratings yet
- Week 2Document90 pagesWeek 2Raising StarNo ratings yet
- Linear Control Systems Time Domain AnalysisDocument22 pagesLinear Control Systems Time Domain AnalysisHoussam moussaNo ratings yet
- Control Systems and Engineering Lesson 4Document49 pagesControl Systems and Engineering Lesson 4EdrielleNo ratings yet
- EET302 M2-Ktunotes - inDocument33 pagesEET302 M2-Ktunotes - inAkhilaNo ratings yet
- Lecture-9 Time Domain Analysis of 1st Order SystemsDocument27 pagesLecture-9 Time Domain Analysis of 1st Order Systemsusama asifNo ratings yet
- 2nd Order ExampleDocument25 pages2nd Order ExampleMagdy RiadNo ratings yet
- Time ResponseDocument84 pagesTime ResponseDhyan PatelNo ratings yet
- Transient and Steady State ResponseDocument24 pagesTransient and Steady State ResponseYasir DawoodNo ratings yet
- 3.1 Time-Domain Analysis of Control Systems: Unit-IiiDocument23 pages3.1 Time-Domain Analysis of Control Systems: Unit-IiiRajasekhar AtlaNo ratings yet
- Exp2 Time ResponseDocument3 pagesExp2 Time Responsegangam aashrithNo ratings yet
- Unidad 2 Parte 2Document63 pagesUnidad 2 Parte 2Miguel CorreaNo ratings yet
- 4 Time ResponseDocument31 pages4 Time Responseheartblade32No ratings yet
- Time Response Analysis HomeworkDocument6 pagesTime Response Analysis HomeworkNotnowNo ratings yet
- Transient Response AnalysisDocument23 pagesTransient Response AnalysisAsif JavedNo ratings yet
- Transient Response and Steady-State Response: Week 5 Session 2Document23 pagesTransient Response and Steady-State Response: Week 5 Session 2Junaidy VandeanganNo ratings yet
- QUBE-Servo 2 - Second Order Systems Workbook (Student)Document6 pagesQUBE-Servo 2 - Second Order Systems Workbook (Student)daanish petkarNo ratings yet
- Chapter 5 Transient and Steady State ResponseDocument33 pagesChapter 5 Transient and Steady State ResponseSounak ChoudhuryNo ratings yet
- Time Response Characteristics of Second-Order Control SystemsDocument25 pagesTime Response Characteristics of Second-Order Control SystemsganesanNo ratings yet
- Lecture 7 Dynamic Modelling and Transient ResponseDocument21 pagesLecture 7 Dynamic Modelling and Transient ResponseKabo MphanyaneNo ratings yet
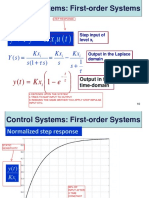
- Control Systems: First-Order Systems: y y KxutDocument59 pagesControl Systems: First-Order Systems: y y KxutsatyamNo ratings yet
- Ch09 STD PDFDocument58 pagesCh09 STD PDFKhalid W. NasserNo ratings yet
- FME 326 - Module 4 - Time ResponseDocument29 pagesFME 326 - Module 4 - Time ResponseJesse Jon FerolinoNo ratings yet
- Analyzing System Time Response Using Poles and ZerosDocument29 pagesAnalyzing System Time Response Using Poles and ZerosJesse Jon FerolinoNo ratings yet
- FME 326 - Module 4 - Time ResponseDocument29 pagesFME 326 - Module 4 - Time ResponseJesse Jon FerolinoNo ratings yet
- Time Domain Analysis of 2nd Order Systems PDFDocument72 pagesTime Domain Analysis of 2nd Order Systems PDFFAHMI ASSIDIQINo ratings yet
- Lecture 22-23-24 Time Domain Analysis of 2nd Order SystemsDocument73 pagesLecture 22-23-24 Time Domain Analysis of 2nd Order SystemsPradeep Kumar Mehta100% (1)
- Transient and Steady-State Analysis of Control SystemsDocument29 pagesTransient and Steady-State Analysis of Control SystemsDK White LionNo ratings yet
- Tutorial 5 Dynamics of second order systemsDocument19 pagesTutorial 5 Dynamics of second order systemsfaraha2406No ratings yet
- Time ResponseDocument14 pagesTime ResponseRilwanNo ratings yet
- Time Response of SecondDocument10 pagesTime Response of Secondkevin bayonaNo ratings yet
- Lectures 13-14Document23 pagesLectures 13-14vishnu reddyNo ratings yet
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsFrom EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNo ratings yet
- An Introduction to Equilibrium Thermodynamics: Pergamon Unified Engineering SeriesFrom EverandAn Introduction to Equilibrium Thermodynamics: Pergamon Unified Engineering SeriesNo ratings yet
- Lab Electrical Power Engineering I: Test 2: Operating Behaviour of The DC MachineDocument21 pagesLab Electrical Power Engineering I: Test 2: Operating Behaviour of The DC MachinenokiaclasNo ratings yet
- OpenHouse-2010-CV-Book-01042010 FinalDocument266 pagesOpenHouse-2010-CV-Book-01042010 FinalUmar IftikharNo ratings yet
- CVs Book 2011 - 2Document259 pagesCVs Book 2011 - 2Umar IftikharNo ratings yet
- Software Architecture of The 8088 and 8086 MicroprocessorsDocument26 pagesSoftware Architecture of The 8088 and 8086 MicroprocessorsPauline AdamsNo ratings yet
- 1 3 1 - SakharovDocument15 pages1 3 1 - SakharovUmar IftikharNo ratings yet
- Professional EthicsDocument184 pagesProfessional Ethicsr_rame7678% (9)
- Integration Formulas: 1. Common IntegralsDocument5 pagesIntegration Formulas: 1. Common IntegralssiegherrNo ratings yet
- How Power Factor Corection WorksDocument16 pagesHow Power Factor Corection Worksapi-3806201100% (6)
- Engr. Muhammad Aamir Aman Lecturer Department of Electrical EngineeringDocument39 pagesEngr. Muhammad Aamir Aman Lecturer Department of Electrical EngineeringUmar IftikharNo ratings yet
- 6.3 - AP Practice Exam - Free Response, 2013 - ExamDocument4 pages6.3 - AP Practice Exam - Free Response, 2013 - ExamUmar IftikharNo ratings yet
- William Stallings Computer Organization and Architecture 8 Edition Input/OutputDocument65 pagesWilliam Stallings Computer Organization and Architecture 8 Edition Input/OutputUmar IftikharNo ratings yet
- USAID Research Policy Draft 2-14Document44 pagesUSAID Research Policy Draft 2-14Umar IftikharNo ratings yet
- CS553 ST7 Ch05-SignalEncodingTechniquesDocument58 pagesCS553 ST7 Ch05-SignalEncodingTechniquesmuthuraj14007No ratings yet
- The Microarchitecture of The Pentium 4 Processor 1Document13 pagesThe Microarchitecture of The Pentium 4 Processor 1yogesh55555No ratings yet
- Notes On Engineering EthicsDocument15 pagesNotes On Engineering Ethicsjunaidkhattak10No ratings yet
- William Stallings Computer Organization and Architecture 8 Edition Computer Evolution and PerformanceDocument83 pagesWilliam Stallings Computer Organization and Architecture 8 Edition Computer Evolution and PerformanceUmar IftikharNo ratings yet
- 05 Internal MemoryDocument33 pages05 Internal MemoryKoteswara Rao LNo ratings yet
- ch19 DCMotors PDFDocument38 pagesch19 DCMotors PDFmehralsmenschNo ratings yet
- US Army - Operator's Manual For M16 and M16A1 Rifles TM 9-1005-249-10Document154 pagesUS Army - Operator's Manual For M16 and M16A1 Rifles TM 9-1005-249-10parazite100% (1)
- Solar tube well construction and installation documentDocument12 pagesSolar tube well construction and installation documentUmar IftikharNo ratings yet
- Lecture 3Document43 pagesLecture 3Umar IftikharNo ratings yet
- Lecture 2Document13 pagesLecture 2Umar IftikharNo ratings yet
- An Adaptive Machine Learning Decision System For Exible Predictive MaintenanceDocument7 pagesAn Adaptive Machine Learning Decision System For Exible Predictive MaintenanceUmar IftikharNo ratings yet
- GATE EE 2003 With SolutionsDocument72 pagesGATE EE 2003 With SolutionsUmar IftikharNo ratings yet
- Manufacturing Automation StrategiesDocument35 pagesManufacturing Automation StrategiesChota BachaNo ratings yet
- FL 5Document34 pagesFL 5Umar IftikharNo ratings yet
- FL 4Document36 pagesFL 4Umar IftikharNo ratings yet
- 1815 12 PDFDocument21 pages1815 12 PDFUmar IftikharNo ratings yet
- Lecture8 CNC PDFDocument77 pagesLecture8 CNC PDFUmar IftikharNo ratings yet
- Machine Learning Guide: Meher Krishna PatelDocument121 pagesMachine Learning Guide: Meher Krishna PatelOgnjen OzegovicNo ratings yet
- Wind Load (NSCP)Document1 pageWind Load (NSCP)dantevarias100% (4)
- Analog Simulation Manual - 2Document72 pagesAnalog Simulation Manual - 2mefortruthNo ratings yet
- Grade 9: Federal Democrati C Republi C OF Ethi OPI A MI NI Stry OF Educati ONDocument324 pagesGrade 9: Federal Democrati C Republi C OF Ethi OPI A MI NI Stry OF Educati ONየየጁ ልጅ እኔNo ratings yet
- What Is The Job of An Archaeologist?Document13 pagesWhat Is The Job of An Archaeologist?Aung Htun LinnNo ratings yet
- Name of The Course: Data Structures (DS) Assignment - 1Document13 pagesName of The Course: Data Structures (DS) Assignment - 1080MeghanaNo ratings yet
- Database Management SystemDocument14 pagesDatabase Management SystemMichelle OganaNo ratings yet
- Bachelor of Civil EngineeringDocument2 pagesBachelor of Civil EngineeringSharmaDeepNo ratings yet
- The Football FormulaDocument56 pagesThe Football FormulaCiprian Dobrescu100% (7)
- Formal Methods: Finite State Machine - Regular ExpressionsDocument14 pagesFormal Methods: Finite State Machine - Regular ExpressionsStatus LifeNo ratings yet
- DLL Grade3 Q1 WK 8Document14 pagesDLL Grade3 Q1 WK 8April ToledanoNo ratings yet
- Sensors and Transducers: Mechatronics - Unit 1, Chapter 2Document41 pagesSensors and Transducers: Mechatronics - Unit 1, Chapter 2Vinay KNo ratings yet
- Real Analysis Solutions Minimum PointDocument9 pagesReal Analysis Solutions Minimum PointJúnia NevesNo ratings yet
- ANSYS Mechanical APDL Modeling and Meshing GuideDocument236 pagesANSYS Mechanical APDL Modeling and Meshing GuideJayakrishnan P SNo ratings yet
- Time Series Forecasting - Sparkling - Buisness ReportDocument70 pagesTime Series Forecasting - Sparkling - Buisness ReportPriyanka PatilNo ratings yet
- Sukanya Samriddhi Calculator VariableDocument38 pagesSukanya Samriddhi Calculator VariablehotalamNo ratings yet
- Divisibility Rules Lesson - Using Rules for 2, 5, 10Document13 pagesDivisibility Rules Lesson - Using Rules for 2, 5, 10Melyn BustamanteNo ratings yet
- Instructions For Preparation of Papers in A B5 Format For Laboratory Competence 2016Document4 pagesInstructions For Preparation of Papers in A B5 Format For Laboratory Competence 2016DanielNo ratings yet
- Novel Approach to Job's MethodDocument6 pagesNovel Approach to Job's Methodiabureid7460No ratings yet
- MathDocument5 pagesMathJanice Villarmino100% (1)
- Mcqs 1Document12 pagesMcqs 1Ralitsa DeeDee Wilcox100% (1)
- Longitudinal Dynamics: 6.1 Response To ControlsDocument10 pagesLongitudinal Dynamics: 6.1 Response To ControlsAlbertoNo ratings yet
- Chapter 3 Problem Solving and ReasoningDocument83 pagesChapter 3 Problem Solving and ReasoningJOSE BENAVENTENo ratings yet
- Relative Velocity AnswersDocument11 pagesRelative Velocity AnswersCanjiNo ratings yet
- Rajasthan Technical University B.Tech SyllabusDocument8 pagesRajasthan Technical University B.Tech SyllabusAmit BagrechaNo ratings yet
- AE 231 Thermodynamics Week 3 Week 3: Instructor: Assoc. Prof. Dr. Sinan EyiDocument47 pagesAE 231 Thermodynamics Week 3 Week 3: Instructor: Assoc. Prof. Dr. Sinan EyiOnur ÖZÇELİKNo ratings yet
- NPTEL Transcript PDFDocument977 pagesNPTEL Transcript PDFLakshmiNarayana Reddy BynagariNo ratings yet
- CH Computer NetworkingDocument7 pagesCH Computer NetworkingmahaNo ratings yet
- Good Practice Guide For Form and Diameter Measurements For Large ShaftsDocument14 pagesGood Practice Guide For Form and Diameter Measurements For Large ShaftsNg Wei LihNo ratings yet
- D5490 Astm Hydro ModellingDocument8 pagesD5490 Astm Hydro ModellingGeotecnia PerúNo ratings yet