You might also like
- Night Foot Lamp W PIR Sensor LED: SpecificationsDocument2 pagesNight Foot Lamp W PIR Sensor LED: SpecificationsKiran KarthikNo ratings yet
- 39 MM (1.54 In) : Wtb2-Epw2/4 Outline Dimension DrawingDocument1 page39 MM (1.54 In) : Wtb2-Epw2/4 Outline Dimension DrawingKiran KarthikNo ratings yet
- XCFR8.E145984 - Terminal Blocks Certified For Canada - ComponentDocument3 pagesXCFR8.E145984 - Terminal Blocks Certified For Canada - ComponentKiran KarthikNo ratings yet
- 1698853828447Document5 pages1698853828447Kiran KarthikNo ratings yet
- EU Declaration of Conformity: Catalog Series DescriptionDocument1 pageEU Declaration of Conformity: Catalog Series DescriptionKiran KarthikNo ratings yet
- Opale: Printing in Black Colour On Plain White PaperDocument1 pageOpale: Printing in Black Colour On Plain White PaperKiran KarthikNo ratings yet
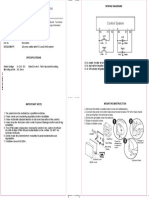
- Control System + +: Left LeftDocument1 pageControl System + +: Left LeftKiran KarthikNo ratings yet
- C3controls Catalog Edition 27 2022 03Document593 pagesC3controls Catalog Edition 27 2022 03Kiran KarthikNo ratings yet
- Through Technology Perfected by Research: Schneider-Electric - Co.inDocument2 pagesThrough Technology Perfected by Research: Schneider-Electric - Co.inKiran KarthikNo ratings yet
- Storage - Instructions - ZF - en - AluminiumDocument1 pageStorage - Instructions - ZF - en - AluminiumKiran KarthikNo ratings yet
- US Sources of Busbar: Ansonia Copper and Brass, IncDocument2 pagesUS Sources of Busbar: Ansonia Copper and Brass, IncKiran KarthikNo ratings yet
- Ampacities and Mechanical Properties of Rectangular Copper Busbars: Table 1. Ampacities of Copper No. 110Document4 pagesAmpacities and Mechanical Properties of Rectangular Copper Busbars: Table 1. Ampacities of Copper No. 110Kiran KarthikNo ratings yet
- The New Standard IEC 61439: Low Voltage Switchgear and Controlgear AssembliesDocument20 pagesThe New Standard IEC 61439: Low Voltage Switchgear and Controlgear AssembliesAdnen BOUAZIZINo ratings yet
- Leitfaden IEC EN61439 en PDFDocument40 pagesLeitfaden IEC EN61439 en PDFmansa12No ratings yet
- Shelf-Life Evaluation of Aluminuin Electrdytic CapacitcirsDocument7 pagesShelf-Life Evaluation of Aluminuin Electrdytic CapacitcirsKiran KarthikNo ratings yet
- Core Balance Current Transformer CBCT: FeaturesDocument1 pageCore Balance Current Transformer CBCT: FeaturesKiran KarthikNo ratings yet
- Aluminium - Handling, Storage, Maintenance and CleaningDocument7 pagesAluminium - Handling, Storage, Maintenance and CleaningKiran KarthikNo ratings yet
- 3wn6 HB en 9905Document120 pages3wn6 HB en 9905Jaqueline RicardoNo ratings yet
- Storage With Theoretical ExplainationDocument5 pagesStorage With Theoretical ExplainationKiran KarthikNo ratings yet
- Disjuntor SiemenesDocument15 pagesDisjuntor SiemenesDaviMiattelloRFNo ratings yet
- DK 0011Document6 pagesDK 0011Kiran KarthikNo ratings yet
- 001.McKechnie Aluminium Solutions LTD - Handling and StorageDocument2 pages001.McKechnie Aluminium Solutions LTD - Handling and StorageKiran KarthikNo ratings yet
- 3wa Infografik 1 en 9to16 LogoDocument1 page3wa Infografik 1 en 9to16 LogoKiran KarthikNo ratings yet
- DK 010Document64 pagesDK 010Kiran KarthikNo ratings yet
- GU - Cabine MT BT (EN) - 1VCP000591 1511Document88 pagesGU - Cabine MT BT (EN) - 1VCP000591 1511Fatmir JashariNo ratings yet
- 3WA Air Circuit Breakers: Integration in Switchgears According To IEC 61439Document1 page3WA Air Circuit Breakers: Integration in Switchgears According To IEC 61439Kiran KarthikNo ratings yet
- Dokumen - Tips Ge Support Support Services Low Voltage Circuit Breaker Parts 1 High VoltageDocument41 pagesDokumen - Tips Ge Support Support Services Low Voltage Circuit Breaker Parts 1 High VoltageKiran KarthikNo ratings yet
- Dokumen - Tips Abb Powerpoint Transformer Components Because Reliability Is Everything Vacuum OltcDocument29 pagesDokumen - Tips Abb Powerpoint Transformer Components Because Reliability Is Everything Vacuum OltcKiran KarthikNo ratings yet
- DK 006Document16 pagesDK 006Kiran KarthikNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Motor Wiring DiagramDocument2 pagesMotor Wiring DiagramSimonNo ratings yet
- Magrini Galileo Cat GenDocument55 pagesMagrini Galileo Cat GenCata Catalin100% (2)
- Final Paper 01 - Structured Essay English MediumDocument7 pagesFinal Paper 01 - Structured Essay English Mediumsigiriya.photographyNo ratings yet
- Heat Worksheet Solutions ExplainedDocument10 pagesHeat Worksheet Solutions ExplainedMEGHNA BAGCHINo ratings yet
- Short Circuit & Overload - Causes, Prevention & Ohm's LawDocument16 pagesShort Circuit & Overload - Causes, Prevention & Ohm's LawChristian DeanNo ratings yet
- Simpson TB 9-6625-2352-35 To Series 5 CalibrationDocument35 pagesSimpson TB 9-6625-2352-35 To Series 5 CalibrationbryanvdzNo ratings yet
- Modified BitumensDocument6 pagesModified BitumensDonNo ratings yet
- Screenshot 2021-02-04 at 21.37.09Document3 pagesScreenshot 2021-02-04 at 21.37.09DoriNo ratings yet
- Load Frequency Control LFCPower System Operation ControlDocument23 pagesLoad Frequency Control LFCPower System Operation Controlsaifur rahmanNo ratings yet
- Flow MeasurementsDocument18 pagesFlow MeasurementsAbhishek SatheeshNo ratings yet
- Armature ReactionDocument26 pagesArmature ReactionAouthithiye MeghaNo ratings yet
- RAC ProblemsDocument12 pagesRAC ProblemsIts meNo ratings yet
- Teco VFD Operating ManualDocument69 pagesTeco VFD Operating ManualStronghold Armory100% (1)
- MidtermI 11012010 SolutionDocument11 pagesMidtermI 11012010 SolutionRolf WangNo ratings yet
- Assignment Open and Closed Thermodynamic SystemDocument1 pageAssignment Open and Closed Thermodynamic SystemJenellie BahintingNo ratings yet
- Design Consideration For Converters and Input FiltersDocument16 pagesDesign Consideration For Converters and Input FiltersYeshewas DemewozNo ratings yet
- ESR Capacitor Meter Project PDFDocument22 pagesESR Capacitor Meter Project PDFzoran_stev100% (1)
- AD8038Document12 pagesAD8038danielNo ratings yet
- Dominique and Janiga Fluid DynamicsDocument232 pagesDominique and Janiga Fluid DynamicsSergio BrigadaNo ratings yet
- AHU OQ & PQ DocumentDocument12 pagesAHU OQ & PQ DocumentAnurag KumbhareNo ratings yet
- Torqeedo Data Sheet 22kwcharger 202111Document2 pagesTorqeedo Data Sheet 22kwcharger 202111cristianNo ratings yet
- Bulk Water Supply Electrical System Design ParametersDocument6 pagesBulk Water Supply Electrical System Design ParametersPrasenjit DeyNo ratings yet
- Physics Investigatory ProjectDocument18 pagesPhysics Investigatory ProjectMoghanNo ratings yet
- Indian Standard: Specification For Electric Ceiling Type Fans and RegulatorsDocument25 pagesIndian Standard: Specification For Electric Ceiling Type Fans and RegulatorsJai KaranNo ratings yet
- Positive, Zero, Negative Sequence of AlternatorDocument3 pagesPositive, Zero, Negative Sequence of AlternatorJeya KannanNo ratings yet
- Melting Point Apparatus InstructionsDocument28 pagesMelting Point Apparatus InstructionsTsuyomi NerumiNo ratings yet
- 3 Phase ApplicationDocument5 pages3 Phase ApplicationIwan BaeNo ratings yet
- Calculate Porosity of Rock Samples (40Document3 pagesCalculate Porosity of Rock Samples (40SherrizaNo ratings yet
- Level Instrument Study - Utilities: Hindustan Urvarak and Rasayan Limited Barauni & SindriDocument20 pagesLevel Instrument Study - Utilities: Hindustan Urvarak and Rasayan Limited Barauni & SindrivinayNo ratings yet
- Data Sheet 79-koyo-TRD-NDocument6 pagesData Sheet 79-koyo-TRD-NVALCICLEINo ratings yet