You might also like
- Table of Laplace Transforms: at BTDocument1 pageTable of Laplace Transforms: at BTValentina EspinozaNo ratings yet
- Laplace TableDocument1 pageLaplace TableJoaquín GonzálezNo ratings yet
- LaplaceTable PDFDocument1 pageLaplaceTable PDFMartin MuñozNo ratings yet
- Laplace TableDocument1 pageLaplace Table백승호No ratings yet
- Laplacetablica PDFDocument1 pageLaplacetablica PDFmladenderajicNo ratings yet
- Table of Laplace Transforms PDFDocument1 pageTable of Laplace Transforms PDFMegaNo ratings yet
- LaplaceTable PDFDocument1 pageLaplaceTable PDFAkyNo ratings yet
- Tabel Laplace Transforms PDFDocument1 pageTabel Laplace Transforms PDFasramabukitNo ratings yet
- LaplaceTable PDFDocument1 pageLaplaceTable PDFJavier231191PNo ratings yet
- Laplace TableDocument1 pageLaplace TableObi-Wan KenobiNo ratings yet
- LaplaceTable PDFDocument1 pageLaplaceTable PDFMackNo ratings yet
- LaplaceTable PDFDocument1 pageLaplaceTable PDFmavi1979No ratings yet
- LaplaceTable PDFDocument1 pageLaplaceTable PDFAdelina Maulidya FirdausNo ratings yet
- LaplaceTable PDFDocument1 pageLaplaceTable PDFPan ChieochanNo ratings yet
- Laplace Table - All FormulasDocument1 pageLaplace Table - All FormulasSlim ShadyNo ratings yet
- Laplace PDFDocument1 pageLaplace PDFmavi1979No ratings yet
- Laplace TableDocument1 pageLaplace TableOuadah IlyesNo ratings yet
- LaplaceTable PDFDocument1 pageLaplaceTable PDFFerry IrmansyahNo ratings yet
- Table of Laplace Transforms: at BTDocument1 pageTable of Laplace Transforms: at BTIvy Lafortune SIYAPTZE NYANDANo ratings yet
- LaplaceTable GJU MasterDocument1 pageLaplaceTable GJU MasterKhairi SalehNo ratings yet
- Taula LaplaceDocument1 pageTaula LaplaceLbshshw OjsjwNo ratings yet
- Tabela LaplaceDocument1 pageTabela LaplaceThiago LiãoNo ratings yet
- Midterm Study ProblemDocument4 pagesMidterm Study ProblemTehe SaglamNo ratings yet
- Tabela Laplace AtualDocument2 pagesTabela Laplace AtualTumblr BoyNo ratings yet
- Laplace Tables and PropertiesDocument2 pagesLaplace Tables and PropertiesYoussef MohamedNo ratings yet
- Laplace Tables and PropertiesDocument2 pagesLaplace Tables and Propertiesahmed belalNo ratings yet
- Formulario de Transformadas de LaplaceDocument1 pageFormulario de Transformadas de LaplaceAnthony E. LqNo ratings yet
- Tablica Laplasovih TransformacijaDocument1 pageTablica Laplasovih TransformacijaHexeresNo ratings yet
- Calculo Iii Tabela Transformada de Laplace PDFDocument1 pageCalculo Iii Tabela Transformada de Laplace PDFCaio Felipe CarvalhoNo ratings yet
- Tabela Transformada de LaplaceDocument1 pageTabela Transformada de LaplaceMatheus VieiraNo ratings yet
- Laplace DonusumuDocument4 pagesLaplace DonusumuAlyakut IbrahimNo ratings yet
- Bảng BD F.RDocument1 pageBảng BD F.Rpro2212No ratings yet
- Tabla de Transformadas de LaplaceDocument7 pagesTabla de Transformadas de LaplaceDavid Sandoval FriasNo ratings yet
- Laplace Transform: Presentation: He YangDocument14 pagesLaplace Transform: Presentation: He YangsaadkhalisNo ratings yet
- Practice 7 (Solution) : S S e S L S e S LDocument6 pagesPractice 7 (Solution) : S S e S L S e S LckithoNo ratings yet
- T T T T T F: 4.0 Laplace TransformationDocument4 pagesT T T T T F: 4.0 Laplace TransformationSiti Munirah Binti ZainudinNo ratings yet
- Lecture 3 ModelingDocument28 pagesLecture 3 ModelingSai AnoopNo ratings yet
- Formula SheetDocument5 pagesFormula SheetMahmut KILIÇNo ratings yet
- A Table of Laplace TransformsDocument1 pageA Table of Laplace TransformsEugene MartinNo ratings yet
- HW#4 SolnDocument15 pagesHW#4 SolnjNo ratings yet
- Introduction To Laplace TransformsDocument32 pagesIntroduction To Laplace TransformsAd Man GeTigNo ratings yet
- Laplace Transformation TableDocument1 pageLaplace Transformation TableDjNo ratings yet
- Fourier Transform PropertiesDocument1 pageFourier Transform PropertiessightlesswarriorNo ratings yet
- MAT 340 - Tabela - LaplaceDocument1 pageMAT 340 - Tabela - LaplaceGabrielle ReisNo ratings yet
- Laplace TransformDocument1 pageLaplace TransformCristian GrajalesNo ratings yet
- Math4 170513085146Document47 pagesMath4 170513085146jucar fernandezNo ratings yet
- SolutionDocument3 pagesSolutionS3LT-14 Fung CalebNo ratings yet
- Lecture 6Document2 pagesLecture 6دريد فاضلNo ratings yet
- Unit-3 Engineering Mathematics-II Laplace Transform and Its ApplicationsDocument7 pagesUnit-3 Engineering Mathematics-II Laplace Transform and Its ApplicationsAnirudh MittalNo ratings yet
- Chapter 15 PP PDFDocument7 pagesChapter 15 PP PDFSumit CerejoNo ratings yet
- Tutorial 2 SolutionsDocument32 pagesTutorial 2 SolutionsSai AnoopNo ratings yet
- Signals and Systems (Practice Questions - Laplace Transform)Document26 pagesSignals and Systems (Practice Questions - Laplace Transform)madivala nagaraja0% (1)
- Laplace MatlabDocument21 pagesLaplace MatlabIrwan WahyudiNo ratings yet
- Tabla LaPlaceDocument2 pagesTabla LaPlaceLau PinNo ratings yet
- Formula Sheet: Useful Trigonometric IdentitiesDocument3 pagesFormula Sheet: Useful Trigonometric Identitieslp110No ratings yet
- Control Systems Formula Sheet PDF FreeDocument12 pagesControl Systems Formula Sheet PDF FreeEidren 02No ratings yet
- Formulas LaplaceDocument1 pageFormulas LaplaceIvo GeceleNo ratings yet
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesFrom EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesRating: 1.5 out of 5 stars1.5/5 (2)
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27From EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27No ratings yet
- Mathes 8Document64 pagesMathes 8murty99100% (1)
- Mathematics 9 - W1 - Module-2 For PrintingDocument34 pagesMathematics 9 - W1 - Module-2 For PrintingRONALD GACUTARA100% (4)
- SimultaneousDocument27 pagesSimultaneousLatchmi DeviNo ratings yet
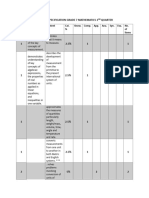
- Table of Specification Grade 7 Mathematics 2ND QuarterDocument4 pagesTable of Specification Grade 7 Mathematics 2ND QuarterGandol JoshNo ratings yet
- Scientific Work PlaceDocument551 pagesScientific Work Placepeloton10No ratings yet
- Tuesday 19 June 2018 - Afternoon: A2 Gce MathematicsDocument4 pagesTuesday 19 June 2018 - Afternoon: A2 Gce MathematicsVishal PandyaNo ratings yet
- Holzer MethodDocument13 pagesHolzer Methodmeadot getachew100% (1)
- Maths For Jee MainsDocument371 pagesMaths For Jee MainsSiddhanth Naidu100% (4)
- WGU Program Guidebook - BSCLSA (Bachelor of Science, Cloud and Systems Administration)Document21 pagesWGU Program Guidebook - BSCLSA (Bachelor of Science, Cloud and Systems Administration)jwawaNo ratings yet
- T. Witmer (Transl) - The Analytic Art - Francois VietteDocument455 pagesT. Witmer (Transl) - The Analytic Art - Francois VietteIonutz Dumitru100% (1)
- A. R. Paterson A First Course in Fluid DynamicsDocument535 pagesA. R. Paterson A First Course in Fluid DynamicsLuis Silva Navarro86% (7)
- Algebra 1 Chapter 3Document62 pagesAlgebra 1 Chapter 3Bryce MillerNo ratings yet
- MA Sample Paper 10 UnsolvedDocument9 pagesMA Sample Paper 10 UnsolvedSambasiva RaoNo ratings yet
- Diophantine Equations: Number Theory Meets Algebra and GeometryDocument7 pagesDiophantine Equations: Number Theory Meets Algebra and GeometryHazel Clemente CarreonNo ratings yet
- Calculus - Concepts and Applications - FoersterDocument731 pagesCalculus - Concepts and Applications - FoersterLindalva Barros82% (55)
- Archies EquationsDocument15 pagesArchies Equations1234abcdNo ratings yet
- Cryptarithmetics 1st Year Advanced - Session-1Document34 pagesCryptarithmetics 1st Year Advanced - Session-1Teja nNo ratings yet
- Differential Equations Variation of ParametersDocument8 pagesDifferential Equations Variation of Parameterslitus321prNo ratings yet
- Calculation of PCB Track ImpedanceDocument6 pagesCalculation of PCB Track ImpedanceDurbha RaviNo ratings yet
- MATS MiningSyllabus PDFDocument83 pagesMATS MiningSyllabus PDFaufal RiswanNo ratings yet
- Slope Deflection Method: Structure of ChapterDocument6 pagesSlope Deflection Method: Structure of ChapterYao SsengssNo ratings yet
- Me4213 Mdof 1Document56 pagesMe4213 Mdof 1Timothy Ling0% (1)
- Mechanical Vibration PDFDocument130 pagesMechanical Vibration PDFViswa NathanNo ratings yet
- Linear Partial Differential Equations of Order Two With Variable CoefficientsDocument30 pagesLinear Partial Differential Equations of Order Two With Variable CoefficientsDilip100% (1)
- SGCSE 6880 Syllabus - Mathematics PDFDocument20 pagesSGCSE 6880 Syllabus - Mathematics PDFLindela M Buz-BèéNo ratings yet
- MGje 6 Fix GX PK Yp RBJ LBRDocument9 pagesMGje 6 Fix GX PK Yp RBJ LBRBANOTH KUMARNo ratings yet
- DRIVE SYSTEM Hydraulic and PneumaticDocument50 pagesDRIVE SYSTEM Hydraulic and PneumaticNor AzlanNo ratings yet
- Ks4 Higher 3 Year SowDocument18 pagesKs4 Higher 3 Year Sowspicy chicken sandwichNo ratings yet
- Clausius BookDocument430 pagesClausius Bookbanedog100% (1)
- Annexure 1. A. 1 Cbse - GR 10 Prelim Exam Portion 23 24Document27 pagesAnnexure 1. A. 1 Cbse - GR 10 Prelim Exam Portion 23 24deeptiNo ratings yet