You might also like
- Building Your Own CNC Router/milling Machine: InstructablesDocument16 pagesBuilding Your Own CNC Router/milling Machine: InstructablesSoma VargaNo ratings yet
- Thomson Electrac HD Linear Actuator Motion Control per CAN BusFrom EverandThomson Electrac HD Linear Actuator Motion Control per CAN BusNo ratings yet
- Multi-Modal TransportationDocument72 pagesMulti-Modal TransportationnemiNo ratings yet
- CNC Sewing and Embroidery MachineDocument5 pagesCNC Sewing and Embroidery MachineniltoncesNo ratings yet
- A Master-Slave DSP Board For Digital ControlDocument5 pagesA Master-Slave DSP Board For Digital Controlfurious143No ratings yet
- Lab3 PDFDocument34 pagesLab3 PDFVõ Bá Quang Duy100% (1)
- Guidelines For The Development and Validation of Spreadsheets PDFDocument21 pagesGuidelines For The Development and Validation of Spreadsheets PDFraj kumar chaudharyNo ratings yet
- Development of Underground Land in MalaysiaDocument17 pagesDevelopment of Underground Land in MalaysiaNorAisyahJamalludinNo ratings yet
- Computer Numerical Control: Banu Akar Neşe Kaynak Duygu Gökçe Meltem ErdiDocument36 pagesComputer Numerical Control: Banu Akar Neşe Kaynak Duygu Gökçe Meltem ErdinenadNo ratings yet
- The Design of The CNC Milling Machine PDFDocument10 pagesThe Design of The CNC Milling Machine PDFFirdaus MikeNo ratings yet
- Four-Axis CNC Machine With Microcontroller For CutDocument5 pagesFour-Axis CNC Machine With Microcontroller For Cutthe leNo ratings yet
- Darocha 2010Document5 pagesDarocha 2010Tahmidur FahimNo ratings yet
- Prototype CNC Machine Design 2Document5 pagesPrototype CNC Machine Design 2hasan alsarrafNo ratings yet
- Prototype CNC Machine DesignDocument7 pagesPrototype CNC Machine DesignSuprapto ToNo ratings yet
- EP3 Aung Chit Thu (Term Paper)Document7 pagesEP3 Aung Chit Thu (Term Paper)အောင် ချစ်သူNo ratings yet
- Wireless Speed Control of DC Motor Using PWM and UARTDocument3 pagesWireless Speed Control of DC Motor Using PWM and UARTElins Journal100% (1)
- Technology Modul Cam Profile: Drive Center International ContDocument8 pagesTechnology Modul Cam Profile: Drive Center International ContRich_78No ratings yet
- Prototype CNC Machine Design PDFDocument6 pagesPrototype CNC Machine Design PDFTheng ChanntholNo ratings yet
- Prototype CNC Machine Design PDFDocument6 pagesPrototype CNC Machine Design PDFTheng ChanntholNo ratings yet
- PMSM Speed ControlDocument39 pagesPMSM Speed ControlKushagra KhamesraNo ratings yet
- Investigacion Puesta A TierraDocument5 pagesInvestigacion Puesta A TierraAgustin BrianeseNo ratings yet
- Design and Fabrication of 3-Axis CNC Milling Machine: AbstractDocument5 pagesDesign and Fabrication of 3-Axis CNC Milling Machine: AbstractMohammedsaleemNo ratings yet
- Control System Based On PLC For WindingDocument4 pagesControl System Based On PLC For WindinghanzrizNo ratings yet
- Project 123Document4 pagesProject 123Roshan DudhalkarNo ratings yet
- AC Induction Motor Volts Per Hertz Control, Driven by eTPU On MCF523xDocument38 pagesAC Induction Motor Volts Per Hertz Control, Driven by eTPU On MCF523xElias CarvalhoNo ratings yet
- EM DynamicPaperDocument10 pagesEM DynamicPaperNimish PrabhukhanolkarNo ratings yet
- Ali 2021 IOP Conf. Ser. Mater. Sci. Eng. 1094 012005Document14 pagesAli 2021 IOP Conf. Ser. Mater. Sci. Eng. 1094 012005Yashvant SinghNo ratings yet
- Retrofitment of CNC Machine Control With PLCDocument16 pagesRetrofitment of CNC Machine Control With PLCVarun S IyerNo ratings yet
- Iit KharagpurDocument39 pagesIit KharagpurBhupendra KharpuseNo ratings yet
- Hardware/software Architecture For Adaptive Control SystemsDocument10 pagesHardware/software Architecture For Adaptive Control SystemsMirela VasiloniNo ratings yet
- 2 Pandian IJMER 2014Document7 pages2 Pandian IJMER 2014Suprapto ToNo ratings yet
- CNC Milling Machine FYP Final Report V1Document53 pagesCNC Milling Machine FYP Final Report V1Piyush NarkhedeNo ratings yet
- Design of PM Synchronous and Brushless DC MotorsDocument8 pagesDesign of PM Synchronous and Brushless DC MotorsEdinson VasquezNo ratings yet
- AutT MotionDocument3 pagesAutT MotionSambath JoyNo ratings yet
- Computer Aided Assessment For Engine Room SimulatorDocument13 pagesComputer Aided Assessment For Engine Room SimulatorPavithra PNo ratings yet
- Ijiset V10 I5 02Document7 pagesIjiset V10 I5 02jbmaina100No ratings yet
- Touch Screen Based Industrial Crane ControllingDocument3 pagesTouch Screen Based Industrial Crane ControllingijsretNo ratings yet
- A PROJECT REPORT ON Electronic Voting MachineDocument97 pagesA PROJECT REPORT ON Electronic Voting Machinereddu143No ratings yet
- Servo Motor: Controlling MotorsDocument6 pagesServo Motor: Controlling MotorsNour JaouraNo ratings yet
- Chameleon ChipDocument27 pagesChameleon ChipJanu GeethakumariNo ratings yet
- Design of Agv With Mobile Communication: ArticleDocument6 pagesDesign of Agv With Mobile Communication: ArticleHo Van RoiNo ratings yet
- Flexible Manufacturing Systems PDFDocument10 pagesFlexible Manufacturing Systems PDFnathiya100% (1)
- Ether Mach Mach3 Plugin GuideDocument24 pagesEther Mach Mach3 Plugin GuideMaintenance SteelMartNo ratings yet
- Speed Control of A 2HP DC MotorDocument25 pagesSpeed Control of A 2HP DC MotorEdul BrianNo ratings yet
- Base Band Modem Hardware Design: P. Antognoni, E. Sereni, S. Cacopardi, S. Carlini, M. ScafiDocument5 pagesBase Band Modem Hardware Design: P. Antognoni, E. Sereni, S. Cacopardi, S. Carlini, M. Scafikokome35No ratings yet
- Cukurova University Faculty of Engineering and Architecture Department of Mechanical Engineering Experiment ReportDocument8 pagesCukurova University Faculty of Engineering and Architecture Department of Mechanical Engineering Experiment ReportSülbiye İşçi TemizciNo ratings yet
- Controlling DC Motor Speed Using PWM From C# Windows ApplicationDocument4 pagesControlling DC Motor Speed Using PWM From C# Windows ApplicationDaniel SileshiNo ratings yet
- Automatic Punching Machine: A Low Cost Approach: Arun S, Sree Rajendra and Vijayavithal BongaleDocument10 pagesAutomatic Punching Machine: A Low Cost Approach: Arun S, Sree Rajendra and Vijayavithal BongaleaktNo ratings yet
- MT ConnectDocument6 pagesMT Connectgangn zangNo ratings yet
- Abd-Alrazzaq2018 Article AComputerNumericalControlCNCMu PDFDocument11 pagesAbd-Alrazzaq2018 Article AComputerNumericalControlCNCMu PDFBinay AkhuriNo ratings yet
- Design and Research of CNC Platform Based On CAN BusDocument5 pagesDesign and Research of CNC Platform Based On CAN BusInternational Journal of Research in Engineering and ScienceNo ratings yet
- 03 Development of ScalableDocument15 pages03 Development of ScalableprjpublicationsNo ratings yet
- Notes of CNCDocument4 pagesNotes of CNCSube Singh InsanNo ratings yet
- Manufacturing Letters: Daniel Frank Hesser, Bernd MarkertDocument4 pagesManufacturing Letters: Daniel Frank Hesser, Bernd MarkertGijvf GbjjNo ratings yet
- Recent Advances in Avl'S CFD Mesh Generation Software - Ese-ToolsDocument6 pagesRecent Advances in Avl'S CFD Mesh Generation Software - Ese-ToolsNhựt KhôiNo ratings yet
- Computer Numerical Control (CNC) : Reading Materials For IC Training ModulesDocument35 pagesComputer Numerical Control (CNC) : Reading Materials For IC Training ModulesjohnNo ratings yet
- NC CNC DNCDocument6 pagesNC CNC DNCNirmitha BathenaNo ratings yet
- Utilising Micro Processor Technology Allows:-: Computer Numerical ControlDocument9 pagesUtilising Micro Processor Technology Allows:-: Computer Numerical ControlWirdiIanNo ratings yet
- Hardware/Software Structure For The Contact Resistance Estimation in The Case of An Elementary ContactDocument4 pagesHardware/Software Structure For The Contact Resistance Estimation in The Case of An Elementary ContactAhmed58seribegawanNo ratings yet
- Test Certificate: Vertical Machining CenterDocument3 pagesTest Certificate: Vertical Machining Centernasir akhtarNo ratings yet
- Modal Analysis of CNC Lathe's Spindle Based On Finite ElementDocument4 pagesModal Analysis of CNC Lathe's Spindle Based On Finite Elementnasir akhtarNo ratings yet
- Modal Analysis of CNC Lathe's Spindle Based On Finite ElementDocument4 pagesModal Analysis of CNC Lathe's Spindle Based On Finite Elementnasir akhtarNo ratings yet
- Unit 4Document3 pagesUnit 4Saloni ChaudharyNo ratings yet
- OEL Proposal Transport Engg Part 1-2 G1 S5 NEWDocument15 pagesOEL Proposal Transport Engg Part 1-2 G1 S5 NEWHana AlisaNo ratings yet
- Outdoor Units: EDUS 39 - 606A - R1Document31 pagesOutdoor Units: EDUS 39 - 606A - R1msn20091No ratings yet
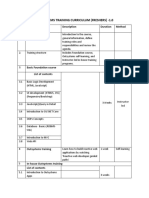
- Outsystems Training Curriculum (Freshers)Document3 pagesOutsystems Training Curriculum (Freshers)Chethan BkNo ratings yet
- BPI m1 DatasheetDocument97 pagesBPI m1 DatasheetIlhamHamiddinNo ratings yet
- Modeling and Simulation of Frequency Reconfigurable Microstrip Patch Antenna For Wimax ApplicationsDocument54 pagesModeling and Simulation of Frequency Reconfigurable Microstrip Patch Antenna For Wimax Applicationskasi sirishaNo ratings yet
- Upload A Document Scribd Non-Linux-Generated Files-Job 221Document2 pagesUpload A Document Scribd Non-Linux-Generated Files-Job 221goddamitNo ratings yet
- IOM - Handte Vortex DualDocument30 pagesIOM - Handte Vortex Duallavanesh1996No ratings yet
- Guindy Race CourseDocument6 pagesGuindy Race CourseVetri VelanNo ratings yet
- SD WanDocument2 pagesSD WanElion SilvaNo ratings yet
- Mercedes Technical Training 287 Ho 02 Audio Communications Crullg 08-02-04Document4 pagesMercedes Technical Training 287 Ho 02 Audio Communications Crullg 08-02-04irene100% (31)
- YD19008 Medical Wearables 2019 Yole Flyer 3Document5 pagesYD19008 Medical Wearables 2019 Yole Flyer 3francistsyNo ratings yet
- Session 01 - ProgrammingDocument20 pagesSession 01 - ProgrammingSara Sagástegui GuarnizNo ratings yet
- 2019 COMTEM Technical Support Service Line Order EMI MauritaniaDocument1 page2019 COMTEM Technical Support Service Line Order EMI MauritaniaBam BANo ratings yet
- Cleanrooms & Air Quality - A Risk-Based Approach - Tim SandleDocument13 pagesCleanrooms & Air Quality - A Risk-Based Approach - Tim SandleHubert BonamisNo ratings yet
- Zend Continuous Delivery BlueprintDocument17 pagesZend Continuous Delivery BlueprintdextervipNo ratings yet
- LMP 91000Document36 pagesLMP 91000robert theNo ratings yet
- Guidelines and ReminderDocument16 pagesGuidelines and ReminderIan Benjamin ReyesNo ratings yet
- Catalogo GoodRidePasajero PDFDocument20 pagesCatalogo GoodRidePasajero PDFJulio BarrenoNo ratings yet
- Ma KR120R3200 PaDocument240 pagesMa KR120R3200 Pajohnstn4544No ratings yet
- 6 Spindle Drive and MotorDocument34 pages6 Spindle Drive and MotorRogerNo ratings yet
- (IT Risk Profiles) Server Security Management by Eav Bunthen (Finalized)Document4 pages(IT Risk Profiles) Server Security Management by Eav Bunthen (Finalized)Shaleh Sen100% (1)
- R30120G2Document6 pagesR30120G2Israel Osornio LeonNo ratings yet
- ARDrone Developer GuideDocument113 pagesARDrone Developer GuideIzukaitz GardonyiNo ratings yet
- Spy RobotDocument7 pagesSpy RobotIJRASETPublicationsNo ratings yet
- Zoomlion RT75 Rough Terrain Truck Crane Operator's Manual PDFDocument178 pagesZoomlion RT75 Rough Terrain Truck Crane Operator's Manual PDFSetiawan Tuhu basukiNo ratings yet