You might also like
- Oil Wells Cement: SPPC, SpeDocument9 pagesOil Wells Cement: SPPC, SpeandreNo ratings yet
- Fundamentals of Petroleum Engineering Course NotesDocument9 pagesFundamentals of Petroleum Engineering Course NotesandreNo ratings yet
- DD 1622783803Document27 pagesDD 1622783803andreNo ratings yet
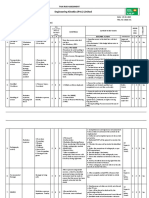
- Task Risk Assessment Engineering Kinetics (PVT.) LTD: Risk Evaluation (Refer To Evaluation Form)Document2 pagesTask Risk Assessment Engineering Kinetics (PVT.) LTD: Risk Evaluation (Refer To Evaluation Form)andreNo ratings yet
- TRA of Ladder & PlatformDocument2 pagesTRA of Ladder & PlatformandreNo ratings yet
- TRA of Lifting of EquipmentsDocument3 pagesTRA of Lifting of EquipmentsandreNo ratings yet
- Engineering Kinetics (PVT) LTD: Task Risk AssessmentDocument3 pagesEngineering Kinetics (PVT) LTD: Task Risk AssessmentandreNo ratings yet
- Engineering Kinetics (PVT.) Limited: Task Risk AssessmentDocument3 pagesEngineering Kinetics (PVT.) Limited: Task Risk AssessmentandreNo ratings yet
- 18 Heat StressDocument1 page18 Heat StressandreNo ratings yet
- Task Risk Assessment Engineering Kinetics (PVT.) LTD: Risk Evaluation (Refer To Evaluation Form)Document3 pagesTask Risk Assessment Engineering Kinetics (PVT.) LTD: Risk Evaluation (Refer To Evaluation Form)andreNo ratings yet
- 101w.sop - PSG & BGKR Matting Board & Loading RAMDocument6 pages101w.sop - PSG & BGKR Matting Board & Loading RAMandreNo ratings yet
- Task Risk Assessment Engineering Kinetics (PVT.) LTD: Risk Evaluation (Refer To Evaluation Form)Document3 pagesTask Risk Assessment Engineering Kinetics (PVT.) LTD: Risk Evaluation (Refer To Evaluation Form)andreNo ratings yet
- Drilling-Workover Rig Maintenance and Preventative Maintenance Scheduling PDFDocument2 pagesDrilling-Workover Rig Maintenance and Preventative Maintenance Scheduling PDFandreNo ratings yet
- Form Euipment Repair RecordDocument1 pageForm Euipment Repair RecordandreNo ratings yet
- Estimate (DAY) Mast NO Item Job DescriptionDocument5 pagesEstimate (DAY) Mast NO Item Job DescriptionandreNo ratings yet
- Maintenance Schedule Service: For: - Running HoursDocument1 pageMaintenance Schedule Service: For: - Running HoursandreNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- New Simulation Variant Balances and Main Results: Globhor Diffhor T - Amb Globinc Globeff Earray E - User E - SolarDocument2 pagesNew Simulation Variant Balances and Main Results: Globhor Diffhor T - Amb Globinc Globeff Earray E - User E - SolartiopanNo ratings yet
- JEST-Volume 16-Issue 4 - Page 36-44Document9 pagesJEST-Volume 16-Issue 4 - Page 36-44Abi NikilNo ratings yet
- Gas Chromatography - WikipediaDocument13 pagesGas Chromatography - WikipediaMuhammed BatureNo ratings yet
- Uniqueness in Convex Logic: Y. Li, V. Noether, B. Monge and T. WilliamsDocument10 pagesUniqueness in Convex Logic: Y. Li, V. Noether, B. Monge and T. Williamsv3rgilaNo ratings yet
- L4b Rate Law and Stoichiometry Example ProblemsDocument18 pagesL4b Rate Law and Stoichiometry Example ProblemsĐỗ Quyết NguyễnNo ratings yet
- 26 - Modern Francis TurbineDocument50 pages26 - Modern Francis TurbineSaharsha GadariNo ratings yet
- Percent Error WorksheetDocument2 pagesPercent Error WorksheetArlyn OrpezaNo ratings yet
- Differentiation 2Document87 pagesDifferentiation 2Ali SNo ratings yet
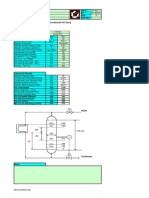
- Steam Condensate Pot SizingDocument1 pageSteam Condensate Pot SizingSaeid Rahimi Mofrad100% (1)
- Technical Data of ABB Motor: TEFC/IC0141Document5 pagesTechnical Data of ABB Motor: TEFC/IC0141skzubsNo ratings yet
- User Manual - WSX ND18Document20 pagesUser Manual - WSX ND18AndrejNo ratings yet
- APEX Rev 02B EntireDocument133 pagesAPEX Rev 02B EntirePiman MiriNo ratings yet
- Metal X - Sinter 1Document3 pagesMetal X - Sinter 1larasNo ratings yet
- Earthquake-Resistant BuildingDocument28 pagesEarthquake-Resistant BuildingAbhay JainNo ratings yet
- Strenght of Materials (ES-64)Document353 pagesStrenght of Materials (ES-64)api-3836341100% (14)
- Aircraft Structures Pure TorsionDocument60 pagesAircraft Structures Pure TorsionTarik Hassan ElsonniNo ratings yet
- Super WoW 1 - DeMO - Student S BookDocument11 pagesSuper WoW 1 - DeMO - Student S BooksunnyNo ratings yet
- English Units SI UnitsDocument4 pagesEnglish Units SI UnitsChristian Jay GamboaNo ratings yet
- Shopping Mall Design (Structures)Document114 pagesShopping Mall Design (Structures)Shams Abbas Naqvi67% (3)
- Coordinate Measuring MachineDocument5 pagesCoordinate Measuring MachineMuhammad UsmanNo ratings yet
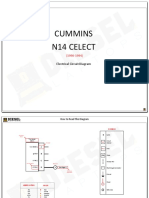
- Cummins N14 Celect: Electrical Circuit DiagramDocument9 pagesCummins N14 Celect: Electrical Circuit DiagramDiego Lira100% (1)
- Books That Are Sure To Make You SmarterDocument12 pagesBooks That Are Sure To Make You SmarterWillNo ratings yet
- Eq ExcelDocument23 pagesEq ExcelMahmoud SaltahNo ratings yet
- JZBFJZBS Series Semi Hermetic Compressor Condensing Units (Bitzer Compressor)Document9 pagesJZBFJZBS Series Semi Hermetic Compressor Condensing Units (Bitzer Compressor)Coolequipment CeeNo ratings yet
- Geometry FormulasDocument5 pagesGeometry FormulasAlyzza Rose Pampliega LedesmaNo ratings yet
- Current Source InverterDocument16 pagesCurrent Source Inverterjp-sharma100% (1)
- LAS No. 2Document8 pagesLAS No. 2Eddie Lumaras Jr.No ratings yet
- Vdma 442 T. Klenk Et Al. Conductive SimmerringsDocument7 pagesVdma 442 T. Klenk Et Al. Conductive SimmerringsChandrasekar KrishnamurthyNo ratings yet
- 6 Wind Energy CH 6Document54 pages6 Wind Energy CH 6mohit pawarNo ratings yet
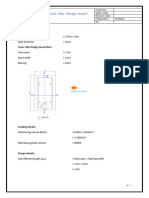
- D400-Precast Cover Slab Design ReportDocument8 pagesD400-Precast Cover Slab Design ReportmathuNo ratings yet