You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5796)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Manual Skidders John DeereDocument16 pagesManual Skidders John Deererossini_daniel50% (2)
- EBME 306-Course Syllabus and Schedule - Fall 2020Document12 pagesEBME 306-Course Syllabus and Schedule - Fall 2020Shyam PolacondaNo ratings yet
- Exam 3 Cheat Sheet: Heat TransferDocument2 pagesExam 3 Cheat Sheet: Heat TransferShyam PolacondaNo ratings yet
- Exam 2 Cheat Sheet:: Pumps, Useful Work Turbines, Effective WorkDocument2 pagesExam 2 Cheat Sheet:: Pumps, Useful Work Turbines, Effective WorkShyam PolacondaNo ratings yet
- Closed System: Heat and Work Can Flow Across The: Always Plug in Absolute Values For Q and WDocument2 pagesClosed System: Heat and Work Can Flow Across The: Always Plug in Absolute Values For Q and WShyam PolacondaNo ratings yet
- Modeling of The Musculoskeletal Systems - 2v.2Document16 pagesModeling of The Musculoskeletal Systems - 2v.2Shyam PolacondaNo ratings yet
- Modeling of The Musculoskeletal System - 1Document9 pagesModeling of The Musculoskeletal System - 1Shyam PolacondaNo ratings yet
- Modeling of The Musculoskeletal Systems 4Document7 pagesModeling of The Musculoskeletal Systems 4Shyam PolacondaNo ratings yet
- EDUC 200-CoLT Activity-Fall 2020Document4 pagesEDUC 200-CoLT Activity-Fall 2020Shyam PolacondaNo ratings yet
- Modeling of The Musculoskeletal Systems (Supplementary 1)Document6 pagesModeling of The Musculoskeletal Systems (Supplementary 1)Shyam PolacondaNo ratings yet
- Modeling of The Musculoskeletal Systems - 6Document8 pagesModeling of The Musculoskeletal Systems - 6Shyam PolacondaNo ratings yet
- University Circle Printer Friendly MenuDocument3 pagesUniversity Circle Printer Friendly MenuShyam PolacondaNo ratings yet
- Design of 24.0m PSC GirderDocument56 pagesDesign of 24.0m PSC GirderVishal SharmaNo ratings yet
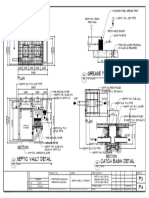
- Grease Trap DetailDocument1 pageGrease Trap Detaildan PioquintoNo ratings yet
- Moments of Forces: Vector Mechanics For Engineers: StaticsDocument32 pagesMoments of Forces: Vector Mechanics For Engineers: StaticsV-academy MathsNo ratings yet
- Specification ARX120HK EnglishDocument5 pagesSpecification ARX120HK Englishheruono sitorusNo ratings yet
- VALVESDocument51 pagesVALVESPalkesh Trivedi100% (2)
- HAKI Yogyakarta Presentation - Sumitomo (Andri Setiawan)Document27 pagesHAKI Yogyakarta Presentation - Sumitomo (Andri Setiawan)Juliyus FajrinNo ratings yet
- Native Data Sheet Asme b73.1Document4 pagesNative Data Sheet Asme b73.1Akhmad Faruq Alhikami100% (1)
- Honda CB400 CM400 CB CM 400 Service Specifications ManualDocument13 pagesHonda CB400 CM400 CB CM 400 Service Specifications ManualNirmala IddawalaNo ratings yet
- L11 PolyXtal - Plast Aniso3 25feb16Document110 pagesL11 PolyXtal - Plast Aniso3 25feb16Neeraj KumarNo ratings yet
- Lecture 7 Properties of Hardened ConcreteDocument40 pagesLecture 7 Properties of Hardened ConcreteGirum MenassieNo ratings yet
- ELX214 Coursework Lab (20%) - 2013 - UpdatedDocument33 pagesELX214 Coursework Lab (20%) - 2013 - UpdatedTeEbhan ChAnthira SeEkaranNo ratings yet
- Transmission Assembly, Oil Filters, Two Wheel and Four Wheel DriveDocument3 pagesTransmission Assembly, Oil Filters, Two Wheel and Four Wheel DriveJohn MendozaNo ratings yet
- Ana ProfileDocument11 pagesAna ProfileMuthana JalladNo ratings yet
- Manual Transmission / Transaxle Power Force X Speed: (Torque) (RPM)Document68 pagesManual Transmission / Transaxle Power Force X Speed: (Torque) (RPM)kandukissNo ratings yet
- Control AveoDocument42 pagesControl AveoKiko GonzalezNo ratings yet
- The Story of Allan D. Pierce Jerry H. GinsbergDocument7 pagesThe Story of Allan D. Pierce Jerry H. GinsbergjeyaselvanmNo ratings yet
- Design Parameters Steam TurbineDocument25 pagesDesign Parameters Steam TurbineeshanrastogiNo ratings yet
- Dozerblade PartsDocument20 pagesDozerblade PartsMarcus LopesNo ratings yet
- 588 801 STM PhysicsDocument30 pages588 801 STM PhysicsthaisubNo ratings yet
- VHR-A-02 Fresadora Vertical RayjoDocument6 pagesVHR-A-02 Fresadora Vertical Rayjoancrsama_09No ratings yet
- SPECIFICATION Low Friction Indoor CableDocument6 pagesSPECIFICATION Low Friction Indoor CableMonika SharmaNo ratings yet
- Stress Ribbon and Cable-Supported Pedestrian Bridges CAP 10Document8 pagesStress Ribbon and Cable-Supported Pedestrian Bridges CAP 10Anonymous VkzquW39No ratings yet
- 1200 CFM or 2000 Cu - MTR Per HR Air Compressor (Datasheet)Document3 pages1200 CFM or 2000 Cu - MTR Per HR Air Compressor (Datasheet)kyawswarpmNo ratings yet
- Stem-General Physics 1: Relationship Among Momentum, Impulse, Force, and Time of Contact in A SystemDocument19 pagesStem-General Physics 1: Relationship Among Momentum, Impulse, Force, and Time of Contact in A Systemzamora pegafiNo ratings yet
- 1 - Circular Motion-Theory& Example Module-2Document24 pages1 - Circular Motion-Theory& Example Module-2Raju SinghNo ratings yet
- Jet - Lube Industrial CatalogDocument25 pagesJet - Lube Industrial CatalogJeremias UtreraNo ratings yet
- Strength and Deformation Properties of Granite, Basalt, Limestone and Tuff at Various Loading RatesDocument162 pagesStrength and Deformation Properties of Granite, Basalt, Limestone and Tuff at Various Loading RatesHaha ZazaNo ratings yet
- Enkel Vanos M50-M52 SealsDocument75 pagesEnkel Vanos M50-M52 Sealsjaimiko20086067100% (1)