You might also like
- Calibrate Guidelines AWWADocument17 pagesCalibrate Guidelines AWWAAntonio Nieto LopezNo ratings yet
- Calibration of Water Distribution 2018Document10 pagesCalibration of Water Distribution 2018Luis Felipe WalterosNo ratings yet
- WaterNetGenManual 2011 10 13Document19 pagesWaterNetGenManual 2011 10 13MwabutwaNo ratings yet
- Computer Application To The Piping Analysis Requirements of ASME Section III, Subscribe NB-3600Document12 pagesComputer Application To The Piping Analysis Requirements of ASME Section III, Subscribe NB-3600sateesh chandNo ratings yet
- Water: Calibration Procedure For Water Distribution Systems: Comparison Among Hydraulic ModelsDocument18 pagesWater: Calibration Procedure For Water Distribution Systems: Comparison Among Hydraulic ModelsWaheed AhmadNo ratings yet
- Report PaperDocument14 pagesReport PaperAlreen-Nadzrif L. SakandalNo ratings yet
- Water Hammer in Gravity LinesDocument12 pagesWater Hammer in Gravity LinesMuhammad Ehtsham0% (1)
- District CoolingDocument16 pagesDistrict Coolingmazzam75No ratings yet
- An Optimization Model For Sustainable Water Distribution Network DesignDocument14 pagesAn Optimization Model For Sustainable Water Distribution Network DesignSolomon ElumaNo ratings yet
- 429 UdpaDocument8 pages429 UdpaSooraj RajanNo ratings yet
- Passive Trap Filter For Harmonic ReductionDocument9 pagesPassive Trap Filter For Harmonic ReductionShiva KumarNo ratings yet
- Piping Flexibility - A Detailed ApproachDocument5 pagesPiping Flexibility - A Detailed ApproachRUDHRA DHANASEKARNo ratings yet
- Lecture 5 Irrigation Engineeing IIDocument26 pagesLecture 5 Irrigation Engineeing IIOmar IsaackNo ratings yet
- Parameter Determination For Modeling System Transients-Part I: Overhead LinesDocument7 pagesParameter Determination For Modeling System Transients-Part I: Overhead LinesMagdiel SchmitzNo ratings yet
- MIKE NET MethodologyDocument47 pagesMIKE NET MethodologymadanegNo ratings yet
- Basics For Stress Analysis of Underground Piping Using Caesar IIDocument4 pagesBasics For Stress Analysis of Underground Piping Using Caesar IIzektor_angel100% (1)
- SPE Mexico Corrosion 06Document9 pagesSPE Mexico Corrosion 06henbauNo ratings yet
- Kim Spitler Delahoussaye 02 Pt2Document24 pagesKim Spitler Delahoussaye 02 Pt2marjan 01No ratings yet
- Multiple Culverts: Example 4Document16 pagesMultiple Culverts: Example 4rodrigoquintanillaNo ratings yet
- On-Line Estimation of Transmission Line Parameters, Temperature and Sag Using PMU MeasurementsDocument7 pagesOn-Line Estimation of Transmission Line Parameters, Temperature and Sag Using PMU Measurementswvargas926No ratings yet
- Hydraulic Transients in Service LinesDocument6 pagesHydraulic Transients in Service Linestsegabirhan haileslassieNo ratings yet
- Sewer CadDocument3 pagesSewer CadLjupka VukicNo ratings yet
- Guide For Calculating Pump Flow Rate and Power Consumption For Large Solar Water HeatersDocument4 pagesGuide For Calculating Pump Flow Rate and Power Consumption For Large Solar Water HeatersMoeNo ratings yet
- Pipe Support Systems (2 PDH) Course No. M-2018Document17 pagesPipe Support Systems (2 PDH) Course No. M-2018arsssyNo ratings yet
- Appendix E - Sizing of Water Piping SystemDocument18 pagesAppendix E - Sizing of Water Piping SystemnjbahmadNo ratings yet
- 1757-482x.3.1.13 2Document14 pages1757-482x.3.1.13 2Y ANo ratings yet
- Basics of Stress Analysis of Underground Piping in Caesar IIDocument4 pagesBasics of Stress Analysis of Underground Piping in Caesar IIiaftNo ratings yet
- A Procedure For The Design of District Metered Areas in Distribution Systems - SciencedirectDocument10 pagesA Procedure For The Design of District Metered Areas in Distribution Systems - Sciencedirectadalcayde2514No ratings yet
- Schedule Deltares May 29thDocument12 pagesSchedule Deltares May 29thMauricio BernalNo ratings yet
- Electro HydraulicDocument20 pagesElectro HydraulicAnkit KumarNo ratings yet
- Modelling Sewer Deterioration For Selective Inspection Planning - Case Study DresdenDocument0 pagesModelling Sewer Deterioration For Selective Inspection Planning - Case Study DresdenibouziNo ratings yet
- Pipe Stress Buriedrajeev - Pathmanathan - 3Document9 pagesPipe Stress Buriedrajeev - Pathmanathan - 3Erz ERNo ratings yet
- Effect of Parameter Uncertainty On Water Quality Predictions in Distribution Systems-Case StudyDocument21 pagesEffect of Parameter Uncertainty On Water Quality Predictions in Distribution Systems-Case StudyJW MedinaceliNo ratings yet
- Automatic Piping Design System for BranchesDocument7 pagesAutomatic Piping Design System for Branchesgunawan61No ratings yet
- PV Water Pumping System DesignDocument6 pagesPV Water Pumping System DesignnicehornetNo ratings yet
- Types of Circuit Breaker and Its Application in Su - En.es PDFDocument8 pagesTypes of Circuit Breaker and Its Application in Su - En.es PDFYesica CarrilloNo ratings yet
- Chapitre 4 Du Livre Urban Water Distribution Networks Assessing Systems Vulnerabilities, Failures, and RisksDocument12 pagesChapitre 4 Du Livre Urban Water Distribution Networks Assessing Systems Vulnerabilities, Failures, and RisksM LearnNo ratings yet
- 2008 Hydro PDFDocument8 pages2008 Hydro PDFMircea BolovedeaNo ratings yet
- Genetic Algorithm Techniques For Calibrating Network ModelsDocument44 pagesGenetic Algorithm Techniques For Calibrating Network ModelsAde YahyaNo ratings yet
- Testing and Evaluating Electronic Gas Measurement Flow ComputersDocument6 pagesTesting and Evaluating Electronic Gas Measurement Flow ComputersAhmed RamadanNo ratings yet
- Analysis of Electrical Interference From Power Lines To Gas Pipelines Part 11: Parametric AnalysisDocument7 pagesAnalysis of Electrical Interference From Power Lines To Gas Pipelines Part 11: Parametric AnalysisjgkrishnanNo ratings yet
- Energies 15 09447 v2Document15 pagesEnergies 15 09447 v2Hazim AshNo ratings yet
- Isothermal Transient Numerical ModelDocument28 pagesIsothermal Transient Numerical ModelAditNo ratings yet
- Analysis of The Corroded Pipeline Segments Using In-Line Inspection DataDocument7 pagesAnalysis of The Corroded Pipeline Segments Using In-Line Inspection Datanasko_123No ratings yet
- Full Paper - Majid PDFDocument6 pagesFull Paper - Majid PDFAkmal Irfan MajidNo ratings yet
- M4a Water Distribution System DesignDocument25 pagesM4a Water Distribution System DesignRealmak AwaNo ratings yet
- Numerical Modelling of Transient Flow in Long Oil Pipe Line SystemDocument33 pagesNumerical Modelling of Transient Flow in Long Oil Pipe Line SystemlsaishankarNo ratings yet
- Long-Term Measurements On A Cable-Stayed BridgeDocument6 pagesLong-Term Measurements On A Cable-Stayed Bridgeunistudent89No ratings yet
- Design exercise CT5550: A drinking water system for an expanding townDocument16 pagesDesign exercise CT5550: A drinking water system for an expanding townHashem EL-MaRimeyNo ratings yet
- Case StudyDocument19 pagesCase StudyGiovene Perez CampomanesNo ratings yet
- Mixed Flow Analysis: Example 9Document25 pagesMixed Flow Analysis: Example 9raghurmiNo ratings yet
- Multiple Culverts: Example 4Document16 pagesMultiple Culverts: Example 4raghurmiNo ratings yet
- Detailed Modeling of CIGRÉ HVDC BenchmarkDocument18 pagesDetailed Modeling of CIGRÉ HVDC Benchmarkpeloduro1010No ratings yet
- For Water Distribution Network: Golden Research Thoughts Impact Factor: 2.2052 (UIF) Volume-3 - Issue-11 - May-2014Document8 pagesFor Water Distribution Network: Golden Research Thoughts Impact Factor: 2.2052 (UIF) Volume-3 - Issue-11 - May-2014ProfAshraf BalabelNo ratings yet
- Design of Water Distribution System For SVNIT CampusDocument27 pagesDesign of Water Distribution System For SVNIT CampusAnshuk GargNo ratings yet
- Practical Methods for Analysis and Design of HV Installation Grounding SystemsFrom EverandPractical Methods for Analysis and Design of HV Installation Grounding SystemsRating: 4.5 out of 5 stars4.5/5 (2)
- Relevant Characteristics of Power Lines Passing through Urban AreasFrom EverandRelevant Characteristics of Power Lines Passing through Urban AreasNo ratings yet
- Advanced Control of AC / DC Power Networks: System of Systems Approach Based on Spatio-temporal ScalesFrom EverandAdvanced Control of AC / DC Power Networks: System of Systems Approach Based on Spatio-temporal ScalesNo ratings yet
- Distribution of Electrical Power: Lecture Notes of Distribution of Electrical Power CourseFrom EverandDistribution of Electrical Power: Lecture Notes of Distribution of Electrical Power CourseNo ratings yet
- Piping and Pipeline Calculations Manual: Construction, Design Fabrication and ExaminationFrom EverandPiping and Pipeline Calculations Manual: Construction, Design Fabrication and ExaminationRating: 4 out of 5 stars4/5 (18)
- Negotiation Training: Free ReportDocument22 pagesNegotiation Training: Free ReportJuan pablo GalesioNo ratings yet
- Chinese Finite Element Human Body Model Development Based On THUMS Occupant v402Document4 pagesChinese Finite Element Human Body Model Development Based On THUMS Occupant v402DeepsNo ratings yet
- Actas Urológicas Españolas: Robotic Surgery: History and Teaching ImpactDocument6 pagesActas Urológicas Españolas: Robotic Surgery: History and Teaching ImpactMohammed Wazeem NNo ratings yet
- Information Brochure ImmaculeDocument11 pagesInformation Brochure ImmaculeAnonymous yBhOAi5UHNo ratings yet
- RoboDK Doc EN Getting StartedDocument20 pagesRoboDK Doc EN Getting Startedtayari_lNo ratings yet
- SCA 2015 Technical PapersDocument561 pagesSCA 2015 Technical PaperschikukotwalNo ratings yet
- Improving Students' Understanding of Electromagnetism Through Visualizations - A Large Scale StudyDocument7 pagesImproving Students' Understanding of Electromagnetism Through Visualizations - A Large Scale StudyaydhezNo ratings yet
- CDR Form New Project-1Document3 pagesCDR Form New Project-1alemakef shumiyeNo ratings yet
- WBN035 - B5.47 - Jun21Document47 pagesWBN035 - B5.47 - Jun21Alberto MedeirosNo ratings yet
- AU-2014 - 4977 - Influence of Material Characterization and Modeling For Improved Pressure PredictionDocument16 pagesAU-2014 - 4977 - Influence of Material Characterization and Modeling For Improved Pressure PredictionAutodesk UniversityNo ratings yet
- Evolution Ofetap Software Tool For Power System Studies: Aliterature SurveyDocument20 pagesEvolution Ofetap Software Tool For Power System Studies: Aliterature SurveyAmirNo ratings yet
- PSIM BrochureDocument20 pagesPSIM BrochureagilsonlibreNo ratings yet
- Operations ManualDocument611 pagesOperations ManualAlberto CatinelliNo ratings yet
- Elsevier 360 Edge For Nursing Proposal - EVCCDocument13 pagesElsevier 360 Edge For Nursing Proposal - EVCCLEONARD CABALUNANo ratings yet
- 5E Teaching Model Using Interactive Simulations Improves Physics AchievementDocument16 pages5E Teaching Model Using Interactive Simulations Improves Physics AchievementLinda Dwi WitrianingrumNo ratings yet
- TR - Aquaculture NC IIDocument64 pagesTR - Aquaculture NC IIBettina SanchezNo ratings yet
- Advance Water Distribution Modeling and Management: Shuming Liu, THUDocument37 pagesAdvance Water Distribution Modeling and Management: Shuming Liu, THUMuhammad JunaidNo ratings yet
- Thesis FinalDocument41 pagesThesis FinalAnonymous pwOxQu100% (1)
- CPCCCM2008B - Learner Guide V3.0Document58 pagesCPCCCM2008B - Learner Guide V3.0sharma SoniaNo ratings yet
- Modflow - Grid Approach: GMS 10.1 TutorialDocument20 pagesModflow - Grid Approach: GMS 10.1 TutorialKosha JagadhitaNo ratings yet
- Aspen Excel TutorialDocument70 pagesAspen Excel TutorialTobias De SomerNo ratings yet
- Karan Mehta - ResumeDocument2 pagesKaran Mehta - ResumeKaran MehtaNo ratings yet
- Grid-Forming Technology in Energy Systems IntegrationDocument80 pagesGrid-Forming Technology in Energy Systems IntegrationYaraRajashekarMudirajNo ratings yet
- Gujarat Technological University: Semester - VIII Subject Name: Internship/ ProjectDocument3 pagesGujarat Technological University: Semester - VIII Subject Name: Internship/ ProjectKushwaha TejpratapNo ratings yet
- Effects of Field of View and Visual Complexity On Virtual Reality Training Effectiveness For A Visual Scanning TaskDocument14 pagesEffects of Field of View and Visual Complexity On Virtual Reality Training Effectiveness For A Visual Scanning TaskJohn DoeNo ratings yet
- Scaling of Differential EquationsDocument149 pagesScaling of Differential Equationsalfonso lopez alquisirez100% (1)
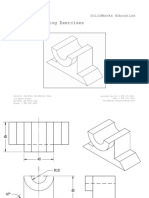
- Detailed Drawing Exercises: Solidworks EducationDocument51 pagesDetailed Drawing Exercises: Solidworks EducationMajd HusseinNo ratings yet
- Engineering, Construction and Architectural Management: Article InformationDocument16 pagesEngineering, Construction and Architectural Management: Article InformationGishan Nadeera GunadasaNo ratings yet
- Weibull BrochureDocument12 pagesWeibull BrochureMadjid HernandezNo ratings yet