You might also like
- Aaa078 Apex Hr200 SM SN 001 To 378 - Rev Sept 2007Document158 pagesAaa078 Apex Hr200 SM SN 001 To 378 - Rev Sept 2007Cindy HartNo ratings yet
- MT7621 Datasheet v0 3Document44 pagesMT7621 Datasheet v0 3Forrest MengNo ratings yet
- Avery Dennison Case Study2Document6 pagesAvery Dennison Case Study2bossdzNo ratings yet
- PCO sCMOS EbookDocument54 pagesPCO sCMOS EbookJohn JahkjhNo ratings yet
- Control and Modelling of Wireless RobotDocument4 pagesControl and Modelling of Wireless RobotPhaniendra KundetiNo ratings yet
- Overview of System Architecture For Platform 2023Document1 pageOverview of System Architecture For Platform 2023Work ConNo ratings yet
- OmniConnect - End-To-End Pipeline - Semi-Detailed ArchitectureDocument1 pageOmniConnect - End-To-End Pipeline - Semi-Detailed ArchitectureAli MurtazaNo ratings yet
- Emerging Technology Roadmap For Large Enterprises: Secu RityDocument1 pageEmerging Technology Roadmap For Large Enterprises: Secu Rityसौरभ राऊत100% (1)
- L09068eng B PDFDocument48 pagesL09068eng B PDFPHYONEGRIP100% (1)
- The Study of Regulation and Control,: Computer Controlled Teaching Unit For With SCADA and PID Control RYCDocument26 pagesThe Study of Regulation and Control,: Computer Controlled Teaching Unit For With SCADA and PID Control RYCAli HadiNo ratings yet
- TCRCDocument17 pagesTCRCMUHAMMAD SHERJEELNo ratings yet
- DCS - SCADA-Expert SystemDocument54 pagesDCS - SCADA-Expert SystemArkadeep ChowdhuryNo ratings yet
- C - Documents and Settings - O - Local Settings - Application Data - Opera - Opera - Cache - G - 007D - opr011OHDocument2 pagesC - Documents and Settings - O - Local Settings - Application Data - Opera - Opera - Cache - G - 007D - opr011OHOleh PoNo ratings yet
- P02093 02 21 47 3619 - Rev 1Document12 pagesP02093 02 21 47 3619 - Rev 1Veera Venkatesh BandaruNo ratings yet
- Microprogrammed ControlDocument30 pagesMicroprogrammed ControlRajdeep BiswasNo ratings yet
- Intelligent Automation Solutions Using Electrics and PneumaticsDocument1 pageIntelligent Automation Solutions Using Electrics and PneumaticsneonatalNo ratings yet
- Sargodha Institute of Technology: ProgramingDocument3 pagesSargodha Institute of Technology: ProgramingUsman UlHaqNo ratings yet
- Valves 65Document37 pagesValves 65Mohamed SabryNo ratings yet
- DIAGDocument1 pageDIAGBrik MalekNo ratings yet
- Throttling CalorimeterDocument16 pagesThrottling CalorimeterJose Lorenzo ToralNo ratings yet
- Computer Controlled Axial Flow Turbine, With SCADA Tfac: Engineering and Technical Teaching EquipmentDocument15 pagesComputer Controlled Axial Flow Turbine, With SCADA Tfac: Engineering and Technical Teaching EquipmentMohammadrezaGheshmiporNo ratings yet
- 11 - Overview of SOQRATESDocument25 pages11 - Overview of SOQRATESsNo ratings yet
- GE Digital Mine Collision Management System Above GroundDocument7 pagesGE Digital Mine Collision Management System Above GroundCarlos Aguirre SilvaNo ratings yet
- SPECTRA-SoftPOS ENDocument3 pagesSPECTRA-SoftPOS ENAbiy MulugetaNo ratings yet
- Poster Navics 5215-2637-82 v0100Document1 pagePoster Navics 5215-2637-82 v0100elmerNo ratings yet
- Components and Development in Big Data S - 2019 - Journal of Electronic ScienceDocument22 pagesComponents and Development in Big Data S - 2019 - Journal of Electronic ScienceradaNo ratings yet
- Kalkitech - Meter Data Management SystemDocument5 pagesKalkitech - Meter Data Management SystemMidhun SubramanianNo ratings yet
- Taauc: Computer Controlled Automobile With SCADADocument16 pagesTaauc: Computer Controlled Automobile With SCADABeshir Heyru MohammedNo ratings yet
- Metal Manufacturing - IoT SolutionDocument3 pagesMetal Manufacturing - IoT SolutionErtan DemirciNo ratings yet
- Wireless Monitoring System of Train Speed Based On Rcm3000: Zeng-Qiang Ma, Zhan-Feng Gao, Yan YanDocument4 pagesWireless Monitoring System of Train Speed Based On Rcm3000: Zeng-Qiang Ma, Zhan-Feng Gao, Yan YanjoakkkoNo ratings yet
- Authorized Licensed Use Limited To: IEEE Xplore. Downloaded On October 23,2023 at 15:25:49 UTC From IEEE Xplore. Restrictions ApplyDocument9 pagesAuthorized Licensed Use Limited To: IEEE Xplore. Downloaded On October 23,2023 at 15:25:49 UTC From IEEE Xplore. Restrictions ApplyAsmir JahićNo ratings yet
- EN2 - OPC UA - From Sensor To IT Enterprise - Wilson - 20191202Document15 pagesEN2 - OPC UA - From Sensor To IT Enterprise - Wilson - 20191202Areugon NiaugihNo ratings yet
- Public 1541807902 Chapter-14b-Io-LinkDocument19 pagesPublic 1541807902 Chapter-14b-Io-LinkFoaad HawarNo ratings yet
- Vortex Tube Refrigerator Unit,: Computer Controlled With SCADA TPVCDocument15 pagesVortex Tube Refrigerator Unit,: Computer Controlled With SCADA TPVCBazlur RahmanNo ratings yet
- Process Controllers For The Meat Processing Industry: Brief DescriptionDocument13 pagesProcess Controllers For The Meat Processing Industry: Brief DescriptionDaniel CaceresNo ratings yet
- Poster Schvar C Bacher RossiDocument1 pagePoster Schvar C Bacher RossiDraoui AhmedNo ratings yet
- Future Digital & System RoadmapDocument61 pagesFuture Digital & System Roadmapmayank19.m3632No ratings yet
- Lesson: Embedded Systems I/O Analog InterfacingDocument7 pagesLesson: Embedded Systems I/O Analog InterfacingPuspala ManojkumarNo ratings yet
- PES Presentation ArcelorMitalDocument30 pagesPES Presentation ArcelorMitalJuan Zarate100% (1)
- 1 20140701170732introduction01Document60 pages1 20140701170732introduction01ARNANI BINTI MADSARANINo ratings yet
- Embedded Engineer RoadMap 2022Document1 pageEmbedded Engineer RoadMap 2022CHEEDARA BHAVANINo ratings yet
- Nagios Based Enhanced IT Management System: Ahmed D. KORADocument9 pagesNagios Based Enhanced IT Management System: Ahmed D. KORAkhadirNo ratings yet
- SCADA Software Architecture: Meha GargDocument15 pagesSCADA Software Architecture: Meha GargTahir AhmedNo ratings yet
- Real-Time Measurement System of Laser Power in VC++Document3 pagesReal-Time Measurement System of Laser Power in VC++djicccNo ratings yet
- Manual Kw1mDocument65 pagesManual Kw1msmartfactoryNo ratings yet
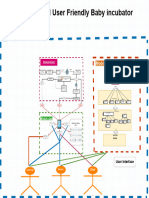
- SmartBabyincub DrawioDocument1 pageSmartBabyincub DrawioYOSEF AbdoNo ratings yet
- Lora Wan For Smart CitiesDocument2 pagesLora Wan For Smart Citiessunny siligamNo ratings yet
- Traffic Management SystemDocument1 pageTraffic Management SystembalabhaviniNo ratings yet
- PM InterfacesSpecCAM en 3.0.0Document24 pagesPM InterfacesSpecCAM en 3.0.0TraianDajmaNo ratings yet
- Logix 3000MD Series: Technical BulletinDocument16 pagesLogix 3000MD Series: Technical BulletinSathishkumar VeluNo ratings yet
- AWS Learning PathDocument1 pageAWS Learning PathNoman AliNo ratings yet
- Network Insight PlatformDocument5 pagesNetwork Insight Platformfelius21811No ratings yet
- SINCAL Intro PDFDocument116 pagesSINCAL Intro PDFhemavathi114071No ratings yet
- Dynatrace Associate Mindmap 021523Document1 pageDynatrace Associate Mindmap 021523karim bakloutiNo ratings yet
- Buses or Data Highways. Since An Interface Bus Is A Parallel Assembly of Connections, Data IsDocument13 pagesBuses or Data Highways. Since An Interface Bus Is A Parallel Assembly of Connections, Data Isranbeer1991No ratings yet
- Fuji Micrex SXDocument73 pagesFuji Micrex SXRetno WulandariNo ratings yet
- 04-Cisco IOS-XR Overview PDFDocument90 pages04-Cisco IOS-XR Overview PDFBerrezeg MahieddineNo ratings yet
- POSTER - Laboratory Software That Connects To Your Labs EcosystemDocument1 pagePOSTER - Laboratory Software That Connects To Your Labs Ecosystemmicrobehunter007No ratings yet
- Proceedings in Distance Relaying::peg) EDocument4 pagesProceedings in Distance Relaying::peg) EFabien CallodNo ratings yet
- Computer Controlled Teaching Unit For The Study of RegulatioDocument17 pagesComputer Controlled Teaching Unit For The Study of RegulatiomahderNo ratings yet
- Application of SCADA in PSDocument5 pagesApplication of SCADA in PSupparahalNo ratings yet
- Current Progress of Big Data Utilization For Official Statistics in Indonesia 11th Stats Cafe 17aug2020Document18 pagesCurrent Progress of Big Data Utilization For Official Statistics in Indonesia 11th Stats Cafe 17aug2020Sulistyo HadiNo ratings yet
- Practical Data Acquisition for Instrumentation and Control SystemsFrom EverandPractical Data Acquisition for Instrumentation and Control SystemsNo ratings yet
- Shear Wall: 1. Hand Book of Concrete Engineering by Lintel 2. Advanced Reinforced Concrete Design by P C VargheseDocument34 pagesShear Wall: 1. Hand Book of Concrete Engineering by Lintel 2. Advanced Reinforced Concrete Design by P C VargheseRacharla Narasimha Raju Varma100% (1)
- Windows Confidential Waiting For RunOnceDocument2 pagesWindows Confidential Waiting For RunOnceYogeshwar VajraveluNo ratings yet
- Title: How To Use This TemplateDocument8 pagesTitle: How To Use This TemplateAlex TomaNo ratings yet
- TintometerDocument2 pagesTintometerFarazNo ratings yet
- ByteBlaster InstructionsDocument11 pagesByteBlaster InstructionsildevanNo ratings yet
- Micro Armour The Game-WWII 2nd Edition (Full Color)Document0 pagesMicro Armour The Game-WWII 2nd Edition (Full Color)burrob31100% (1)
- PC Data SheetDocument2 pagesPC Data SheetChristian CarroNo ratings yet
- 1.HM Lambda Engine CompletedDocument10 pages1.HM Lambda Engine CompletedAlex GarciaNo ratings yet
- The First Lesson Plan ShapesDocument2 pagesThe First Lesson Plan Shapesapi-374751355No ratings yet
- c1 GSM C-I C-A RatioDocument2 pagesc1 GSM C-I C-A RatioTien Pham XuanNo ratings yet
- Fire Hydrant SystemDocument12 pagesFire Hydrant Systemabdullah sahib100% (1)
- CIS Oracle MySQL Community Server 5.7 Benchmark v1.0.0Document77 pagesCIS Oracle MySQL Community Server 5.7 Benchmark v1.0.0Diego Neves FariaNo ratings yet
- CSP U1l2 Design A Digital DeviceDocument9 pagesCSP U1l2 Design A Digital Deviceapi-524141584No ratings yet
- Vehicle and Driver Vibration - PPTDocument16 pagesVehicle and Driver Vibration - PPTAnirban MitraNo ratings yet
- Catalogo Chiller YorkDocument64 pagesCatalogo Chiller YorkmilanorubNo ratings yet
- Margaret Biester ResumeDocument2 pagesMargaret Biester ResumemidgebeastNo ratings yet
- Accommodation Brochure (v1 Dec 2016)Document8 pagesAccommodation Brochure (v1 Dec 2016)Daniel HendersonNo ratings yet
- No Objection CertificateDocument8 pagesNo Objection CertificateLokesh KumarNo ratings yet
- EfmsDocument3 pagesEfmscfam_egsrdNo ratings yet
- 01-Tender Information FormDocument8 pages01-Tender Information FormEzuan AdamNo ratings yet
- National Semiconductor Library Components ListDocument36 pagesNational Semiconductor Library Components ListMatej PalNo ratings yet
- RDSO-SPN-199 2010 Rev 1 1Document19 pagesRDSO-SPN-199 2010 Rev 1 1nitindhiman11No ratings yet
- DSP IMP QuestionsDocument5 pagesDSP IMP QuestionsAshok BattulaNo ratings yet
- LG+ EAY62810301+LGP32-13PL1 Crystal SysbDocument37 pagesLG+ EAY62810301+LGP32-13PL1 Crystal Sysbdreamyson1983No ratings yet
- Assignment Materials 1 (Group J)Document13 pagesAssignment Materials 1 (Group J)MUHAMMAD IDZLAN BIN AZMI / UPMNo ratings yet
- BL20 TurckDocument2 pagesBL20 TurckRafael EduardoNo ratings yet
- Application Guidelines For Transformer Connection and Grounding For Distributed Generation - An UpdateDocument5 pagesApplication Guidelines For Transformer Connection and Grounding For Distributed Generation - An UpdateRajuNo ratings yet