You might also like
- Project Procedure IMP 16Document22 pagesProject Procedure IMP 16Jose R C FernandesNo ratings yet
- Input Tax Credit (TC)Document128 pagesInput Tax Credit (TC)Sidhant GoyalNo ratings yet
- Solvents and Their Nomenclauture PDFDocument10 pagesSolvents and Their Nomenclauture PDFAashish GauravNo ratings yet
- Discover Haxeflixel FullDocument182 pagesDiscover Haxeflixel FullKristian Macanga100% (3)
- Token Economics BookDocument81 pagesToken Economics BookNara E Aí100% (3)
- Electronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 3From EverandElectronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 3Rating: 3 out of 5 stars3/5 (2)
- ETL Process in Data WarehouseDocument40 pagesETL Process in Data WarehouseshariqatariqNo ratings yet
- Mobile Radio Propagation: Small-Scale Fading and MultipathDocument88 pagesMobile Radio Propagation: Small-Scale Fading and MultipathKhyati ZalawadiaNo ratings yet
- Lecture 6 Multipath FadingDocument37 pagesLecture 6 Multipath FadingWajeeha_Khan1No ratings yet
- Setup Manual 0if-Plus B-64647en - 01 - 01Document400 pagesSetup Manual 0if-Plus B-64647en - 01 - 01Aloisio Gonzaga100% (1)
- Lec 8 FadingDocument30 pagesLec 8 FadingDuy LeNo ratings yet
- Chapter 5Document53 pagesChapter 5Sherkhan3No ratings yet
- Mobile Radio Propagation: Small-Scale Fading and MultipathDocument68 pagesMobile Radio Propagation: Small-Scale Fading and MultipathAshish BhardwajNo ratings yet
- Chapter 4 - Mobile BasicsDocument55 pagesChapter 4 - Mobile Basicsn2hj2n100% (1)
- Mobile Radio Propagation EffectsDocument35 pagesMobile Radio Propagation EffectsPriya DarshuNo ratings yet
- The Fourier Series and Fourier TransformDocument55 pagesThe Fourier Series and Fourier Transformnkosana2No ratings yet
- Spread Spectrum Communications: - Effectively The Signal Is Mapped To A Higher Dimension Signal SpaceDocument29 pagesSpread Spectrum Communications: - Effectively The Signal Is Mapped To A Higher Dimension Signal SpaceHimanshu AgrawalNo ratings yet
- SampleingDocument13 pagesSampleinganthony.onyishi.242680No ratings yet
- Multirate Signal ProcessingDocument39 pagesMultirate Signal ProcessingTô Minh ĐạtNo ratings yet
- Multipath Fading: Instructor: M.A. Ingram ECE4823Document6 pagesMultipath Fading: Instructor: M.A. Ingram ECE4823ragvshahNo ratings yet
- Fourier Transform of Periodic SignalsDocument55 pagesFourier Transform of Periodic SignalsShiju RamachandranNo ratings yet
- Signals and SystemsDocument14 pagesSignals and SystemsNaveen PeerlaNo ratings yet
- Sampling of Continous-Time SignalsDocument77 pagesSampling of Continous-Time SignalsRakesh PogulaNo ratings yet
- Lecture 12Document35 pagesLecture 12Anonymous jxm0WNS7QaNo ratings yet
- L12: Distortion and Interference in FM: D) (2 2 Cos) (1) ('Document10 pagesL12: Distortion and Interference in FM: D) (2 2 Cos) (1) ('Hunter VerneNo ratings yet
- Tapped Delay Line Model of Linear Randomly Time-Variant WSSUS ChannelDocument9 pagesTapped Delay Line Model of Linear Randomly Time-Variant WSSUS ChannelIsmalia RahayuNo ratings yet
- Lecture 17-Sampling TheoremDocument18 pagesLecture 17-Sampling TheoremAbdelrhman MahfouzNo ratings yet
- Nyquist Sampling Theorem and Signal ReconstructionDocument13 pagesNyquist Sampling Theorem and Signal ReconstructionSalmaanCadeXaajiNo ratings yet
- EE359 - Lecture 4 Outline: AnnouncementsDocument9 pagesEE359 - Lecture 4 Outline: AnnouncementsHussain NaushadNo ratings yet
- Lecture 7 1 Impulse Respse ModelDocument18 pagesLecture 7 1 Impulse Respse ModelRishabh SinghNo ratings yet
- Sampling and Aliasing: CSE 421 Digital ControlDocument12 pagesSampling and Aliasing: CSE 421 Digital ControlAhmed YounisNo ratings yet
- Discrete-Time Control Systems DesignDocument12 pagesDiscrete-Time Control Systems DesignLucas SantosNo ratings yet
- Mobile Radio Propagation: Small-Scale Path Loss: EENG473 Mobile Communications Module 3: Week #Document76 pagesMobile Radio Propagation: Small-Scale Path Loss: EENG473 Mobile Communications Module 3: Week #Eyob TadesseNo ratings yet
- Multicarrier Transmission Systems ExplainedDocument9 pagesMulticarrier Transmission Systems ExplainedlonlinnessNo ratings yet
- optimum receiverDocument6 pagesoptimum receiverlikahab960No ratings yet
- CH 07Document51 pagesCH 07陳浚維No ratings yet
- Columbia University Mention of Hedy LamarrDocument44 pagesColumbia University Mention of Hedy LamarrHatim ZaghloulNo ratings yet
- 3F4 Power and Energy Spectral Density: Dr. I. J. WassellDocument12 pages3F4 Power and Energy Spectral Density: Dr. I. J. WassellNaeem Ali SajadNo ratings yet
- L19: Introduction To Digital Communication: (P&S Pp. 7-12, 45-49, 192-194, 290-298, 302-305 C&C Pp. 263-6, 544-54)Document18 pagesL19: Introduction To Digital Communication: (P&S Pp. 7-12, 45-49, 192-194, 290-298, 302-305 C&C Pp. 263-6, 544-54)Hunter VerneNo ratings yet
- 7 - The Sampling TheoremDocument16 pages7 - The Sampling TheoremLy EsNo ratings yet
- AAU/AAIT CENTER OF BIOMEDICAL ENGINEERING DIGITAL SIGNAL PROCESSINGDocument51 pagesAAU/AAIT CENTER OF BIOMEDICAL ENGINEERING DIGITAL SIGNAL PROCESSINGSurafel TadesseNo ratings yet
- False Lock Performance of I-Q Costas Loops For Pulse-Shaped Binary Phase Shift KeyingDocument8 pagesFalse Lock Performance of I-Q Costas Loops For Pulse-Shaped Binary Phase Shift KeyingRéda BenhousniNo ratings yet
- Signals & SystemDocument26 pagesSignals & SystemMuhammadUsamaNo ratings yet
- S-72.1140 Transmission Methods in Telecommunication Systems (5 CR)Document41 pagesS-72.1140 Transmission Methods in Telecommunication Systems (5 CR)vila mathankiNo ratings yet
- EE-232 Signals & Systems Lecture 2 Signals Concepts & PropertiesDocument17 pagesEE-232 Signals & Systems Lecture 2 Signals Concepts & PropertiesseltyNo ratings yet
- Chapter2 Lect3Document14 pagesChapter2 Lect3Olga Joy Labajo GerastaNo ratings yet
- Note 1470368643Document10 pagesNote 1470368643abhishekNo ratings yet
- Fourier Analysis of Signals and Systems: Babul IslamDocument24 pagesFourier Analysis of Signals and Systems: Babul IslamapcandyboyNo ratings yet
- EEE 107 Lecture 9 - Analog Pulse ModulationDocument30 pagesEEE 107 Lecture 9 - Analog Pulse Modulation許耕立No ratings yet
- Comprehensive Exam19-20 PartBDocument4 pagesComprehensive Exam19-20 PartBAman GuptaNo ratings yet
- Chapter2 Lect3Document14 pagesChapter2 Lect3nctgayarangaNo ratings yet
- Chapter 5Document64 pagesChapter 5HaniNo ratings yet
- ECE 461: Digital Communication Lecture 8b: Pulse Shaping and SamplingDocument9 pagesECE 461: Digital Communication Lecture 8b: Pulse Shaping and SamplingShounak DasguptaNo ratings yet
- Statistical Multipath Channel ModellingDocument18 pagesStatistical Multipath Channel ModellingGabriel KiarieNo ratings yet
- Minimum Distance Sequence Detection Receiver Design for PAMDocument8 pagesMinimum Distance Sequence Detection Receiver Design for PAMMalkurthi SreekarNo ratings yet
- Lec 3Document24 pagesLec 3dwirelesNo ratings yet
- Pulse Am PL ModulationDocument8 pagesPulse Am PL ModulationKiranKumarNo ratings yet
- Principle of Communication EngineeringDocument52 pagesPrinciple of Communication Engineeringسعيد ابوسريعNo ratings yet
- Kuliah 6b Bandpass ModulationDocument50 pagesKuliah 6b Bandpass ModulationBambang Arie SNo ratings yet
- Lecture 09Document7 pagesLecture 09Dr. Rami HalloushNo ratings yet
- N DSP6Document10 pagesN DSP6sadhanatiruNo ratings yet
- Tema 1: Balance de Enlace: Sistemas y Canales de TransmisiónDocument68 pagesTema 1: Balance de Enlace: Sistemas y Canales de TransmisiónJefferson RomoNo ratings yet
- Lecture Notes CS LWS FinalDocument56 pagesLecture Notes CS LWS FinalQuasiNo ratings yet
- ECE 3512 - Signal Modulation and Demodulation TechniquesDocument15 pagesECE 3512 - Signal Modulation and Demodulation TechniquesRicha SharmaNo ratings yet
- Analog and Digital Communications: 4. Sampling and Pulse Code ModulationDocument18 pagesAnalog and Digital Communications: 4. Sampling and Pulse Code Modulationaditya_vyas_13No ratings yet
- Lecture 6Document8 pagesLecture 6ArYanChoudhAryNo ratings yet
- InterferenceDocument35 pagesInterferenceAbdullah OmarNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- WCCH 5Document129 pagesWCCH 5Yeroosan seenaaNo ratings yet
- Section 4: Satellite Tracking: Marine Conservation Science and Policy Service Learning ProgramDocument26 pagesSection 4: Satellite Tracking: Marine Conservation Science and Policy Service Learning ProgramNivedini KuttiNo ratings yet
- TRCK - Tracking Systems For Satellite CommunicationsDocument15 pagesTRCK - Tracking Systems For Satellite CommunicationsYeroosan seenaaNo ratings yet
- 638341140 (1)Document7 pages638341140 (1)Nishit BhanushaliNo ratings yet
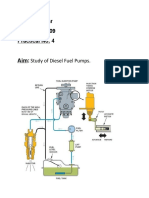
- Study of Diesel Fuel Pumps ComponentsDocument6 pagesStudy of Diesel Fuel Pumps ComponentsPro GamerssNo ratings yet
- Engleza Cls A 11 A A VarDocument4 pagesEngleza Cls A 11 A A VarMariusEc0No ratings yet
- Gmail - DFA Passport Appointment System - Confirmation Notification PDFDocument2 pagesGmail - DFA Passport Appointment System - Confirmation Notification PDFGarcia efrilNo ratings yet
- State Board of Education Memo On Broward County (Oct. 4, 2021)Document40 pagesState Board of Education Memo On Broward County (Oct. 4, 2021)David SeligNo ratings yet
- DSP Lect 11 Iir DesignDocument50 pagesDSP Lect 11 Iir DesignSayyeda UmbereenNo ratings yet
- Saving Your Work in MATLAB: Saving Data and The Contents of The Command WindowDocument2 pagesSaving Your Work in MATLAB: Saving Data and The Contents of The Command WindowMakhdoom Ibad HashmiNo ratings yet
- EI2 Public Benefit Organisation Written Undertaking External FormDocument1 pageEI2 Public Benefit Organisation Written Undertaking External Formshattar47No ratings yet
- Liftking Forklift PDIDocument1 pageLiftking Forklift PDIManual ForkliftNo ratings yet
- Home Work Chapter 1 To 12Document50 pagesHome Work Chapter 1 To 12Haha JohnNgNo ratings yet
- TPM as a Tool for Better Practices at Roots Industries LtdDocument27 pagesTPM as a Tool for Better Practices at Roots Industries LtdSeif HabbachiNo ratings yet
- Consumer Behaviour 1Document11 pagesConsumer Behaviour 1Rushika ShahNo ratings yet
- Power Converters Simulation Lab Manual - (2015-2016)Document41 pagesPower Converters Simulation Lab Manual - (2015-2016)Leela KrishnaNo ratings yet
- Q Asgt - Biz Law - A192Document10 pagesQ Asgt - Biz Law - A192otaku himeNo ratings yet
- 20NCT2 1784 SampleDocument12 pages20NCT2 1784 Samplekimjohn dejesusNo ratings yet
- Assignment 2 QP MPMC - ITDocument1 pageAssignment 2 QP MPMC - ITProjectsNo ratings yet
- Fullpapers Kmp31ce4c51eafullDocument11 pagesFullpapers Kmp31ce4c51eafullyohana biamnasiNo ratings yet
- Excel calendarDocument28 pagesExcel calendarThanh LêNo ratings yet
- 2017-02-02 - Moneysaver - Lewis-Clark EditionDocument20 pages2017-02-02 - Moneysaver - Lewis-Clark EditionDavid ArndtNo ratings yet
- AICTE NoticeDocument1 pageAICTE NoticeThe WireNo ratings yet
- Microsoft v. TomTom ComplaintDocument10 pagesMicrosoft v. TomTom ComplaintcoderightsNo ratings yet
- Malware Analysis Project ClusteringDocument11 pagesMalware Analysis Project ClusteringGilian kipkosgeiNo ratings yet
- DATACOM Multiple Choice Question 6Document1 pageDATACOM Multiple Choice Question 6girijamohapatraNo ratings yet