You might also like
- Chapter 4 - Mobile BasicsDocument55 pagesChapter 4 - Mobile Basicsn2hj2n100% (1)
- Multipath FadingDocument18 pagesMultipath FadingJulia JosephNo ratings yet
- A Primer on Digital Modulation TechniquesDocument7 pagesA Primer on Digital Modulation TechniquesFaisal AmirNo ratings yet
- Introduction To: Fading Channels, Part 2 Fading Channels, Part 2Document39 pagesIntroduction To: Fading Channels, Part 2 Fading Channels, Part 2Ram Kumar GummadiNo ratings yet
- MATLAB Simulation of Basic SignalsDocument69 pagesMATLAB Simulation of Basic SignalsDipali Awate KorkeNo ratings yet
- Awgn ChannelDocument19 pagesAwgn ChannelAnkit KumarNo ratings yet
- 5GMF WP101 11 5G Rat PDFDocument26 pages5GMF WP101 11 5G Rat PDFAvik ModakNo ratings yet
- Simulation Reference Library ForDocument12 pagesSimulation Reference Library ForTeddy112No ratings yet
- DSP Lab Manual GEC Dahod 1Document40 pagesDSP Lab Manual GEC Dahod 1Tushar MhuskeyNo ratings yet
- 4G DocumentationDocument13 pages4G DocumentationSwathi SwarnaNo ratings yet
- 07bDocument30 pages07bJorge A. Perez YebraNo ratings yet
- TelecommunicationDocument10 pagesTelecommunicationSamit TandukarNo ratings yet
- Maximum Likelihood Programming in RDocument7 pagesMaximum Likelihood Programming in Rmrt5000No ratings yet
- Unit I: 1 - Page Notes Prepared By: Diwakar YagyasenDocument34 pagesUnit I: 1 - Page Notes Prepared By: Diwakar YagyasenNishant MishraNo ratings yet
- Unbiasedness: Sudheesh Kumar Kattumannil University of HyderabadDocument10 pagesUnbiasedness: Sudheesh Kumar Kattumannil University of HyderabadKostas KonstantinidisNo ratings yet
- Energy Mastery BookletDocument21 pagesEnergy Mastery Bookletapi-422428700No ratings yet
- Multiple Antenna TechnologyDocument5 pagesMultiple Antenna TechnologySenthilathiban ThevarasaNo ratings yet
- IJDIWC - Volume 3, Issue 1Document143 pagesIJDIWC - Volume 3, Issue 1IJDIWCNo ratings yet
- Channel Estimation For IEEE802.15.11Document12 pagesChannel Estimation For IEEE802.15.11nelsitotovarNo ratings yet
- Stat CookbookDocument31 pagesStat CookbookGeorgeNo ratings yet
- Report of OfdmDocument60 pagesReport of OfdmAgnibha DasguptaNo ratings yet
- Neural Networks - A Worked Example PDFDocument13 pagesNeural Networks - A Worked Example PDFMVRajeshMaliyeckalNo ratings yet
- Cdma Logical ChannelsDocument19 pagesCdma Logical ChannelsMike MelsonNo ratings yet
- Lte Ofdm, Ofdma and Sc-FdmaDocument5 pagesLte Ofdm, Ofdma and Sc-FdmaSamsher SinghNo ratings yet
- DSP Manual EceDocument57 pagesDSP Manual EceNagaraj VaithilingamNo ratings yet
- Signal-To-Noise Ratio (SNR), E, E: N Ax y A X N NDocument3 pagesSignal-To-Noise Ratio (SNR), E, E: N Ax y A X N Nzemen1511No ratings yet
- Expert SystemDocument4 pagesExpert Systempunisher22No ratings yet
- Discrete Probability and Likelihood: Readings: Agresti (2002), Section 1.2Document17 pagesDiscrete Probability and Likelihood: Readings: Agresti (2002), Section 1.2vsuarezf2732No ratings yet
- Channel State InformationDocument2 pagesChannel State InformationAnkur Agarwal0% (1)
- CV With CertificateDocument25 pagesCV With CertificateNafraz Mohamed0% (1)
- I I Min 0 0 MinDocument4 pagesI I Min 0 0 MinKARKAR NORANo ratings yet
- Neural Networks - LearningDocument26 pagesNeural Networks - Learningoletoro14No ratings yet
- 5G - Fifth-Generation ExplanationDocument5 pages5G - Fifth-Generation ExplanationSertse Dingle ShewandagnNo ratings yet
- Realizing 5G Sub-6-GHz Massive MIMO Using GaNDocument5 pagesRealizing 5G Sub-6-GHz Massive MIMO Using GaNPratik AvhadNo ratings yet
- Netsim Experiment Manual v9 1Document147 pagesNetsim Experiment Manual v9 1RajNo ratings yet
- Adaptive FiltersDocument14 pagesAdaptive FiltersSonu VermaNo ratings yet
- Lab 02A-Signals and Wave Form Generation: ObjectivesDocument8 pagesLab 02A-Signals and Wave Form Generation: ObjectivesAleena QureshiNo ratings yet
- Paper Batteries Pave Way for Thinner ElectronicsDocument14 pagesPaper Batteries Pave Way for Thinner ElectronicsLaxmanpallai PallaiNo ratings yet
- Overview of As ConvergenceDocument17 pagesOverview of As ConvergenceAngie Tobias - LozanoNo ratings yet
- MastersThesis JawadAhmedMalikDocument73 pagesMastersThesis JawadAhmedMalikKebebe FikaduNo ratings yet
- Kishore Resume NewDocument5 pagesKishore Resume NewHemant MishraNo ratings yet
- MIMO FUTURE OF MOBILE TELECOMMUNICATIONSDocument18 pagesMIMO FUTURE OF MOBILE TELECOMMUNICATIONSqazi hussain shahNo ratings yet
- SwitchingDocument3 pagesSwitchingaswinNo ratings yet
- Matlab Coding Spl-1Document8 pagesMatlab Coding Spl-1anilkumawat04No ratings yet
- Neural Network Practical FileDocument22 pagesNeural Network Practical Filepiyush guptaNo ratings yet
- Multiple-Input and Multiple-Output, MIMO: (Mee-Moh or My-Moh)Document34 pagesMultiple-Input and Multiple-Output, MIMO: (Mee-Moh or My-Moh)Azeem MaheenNo ratings yet
- Tutorial Chap 2 SolDocument5 pagesTutorial Chap 2 SolLulzim LumiNo ratings yet
- Leveraging MIMO in Wide-Area NetworksDocument6 pagesLeveraging MIMO in Wide-Area NetworksVamsi KrishnaNo ratings yet
- Develop The Following Programs in The MATLAB EnvironmentDocument7 pagesDevelop The Following Programs in The MATLAB EnvironmentRongChơiChiTửNo ratings yet
- Rayleigh Fading Channel ModelingDocument4 pagesRayleigh Fading Channel Modelingslimane1No ratings yet
- Exercises Principle Electronics CommunicationsDocument5 pagesExercises Principle Electronics CommunicationsDatpmNo ratings yet
- Week8 9 AnnDocument41 pagesWeek8 9 AnnBaskoroNo ratings yet
- ProblemsDocument50 pagesProblemsAngelo Luigi YasayNo ratings yet
- NetSim User ManualDocument244 pagesNetSim User ManualAnghel Florin CatalinNo ratings yet
- Optical Packet Switching NW Seminar ReportDocument25 pagesOptical Packet Switching NW Seminar ReportMedi Srikanth NethaNo ratings yet
- Plot GNB SNR at UE in NetSim - NetSim Support PortalDocument6 pagesPlot GNB SNR at UE in NetSim - NetSim Support PortalEphiream Ĝ. ÆbNo ratings yet
- Suresh Singh C.VDocument4 pagesSuresh Singh C.VVikas LunthiNo ratings yet
- This LTE Tutorial Covers LTE Cell Search Procedure Used by UEDocument5 pagesThis LTE Tutorial Covers LTE Cell Search Procedure Used by UEPramod KumarNo ratings yet
- NETSIM WorkshopDocument2 pagesNETSIM WorkshopRAJESHNo ratings yet
- Closer2019 InstDocument12 pagesCloser2019 InstKhyati ZalawadiaNo ratings yet
- Riya Mind Map Science-20200419145022Document1 pageRiya Mind Map Science-20200419145022Khyati ZalawadiaNo ratings yet
- Cut of Marks Engineering PDFDocument13 pagesCut of Marks Engineering PDFKhyati ZalawadiaNo ratings yet
- SOCIAL SCIENCE Application Based QuestionsDocument3 pagesSOCIAL SCIENCE Application Based QuestionsKhyati ZalawadiaNo ratings yet
- Ebooklet ME MPharm 2015 PDFDocument89 pagesEbooklet ME MPharm 2015 PDFKhyati ZalawadiaNo ratings yet
- Smartie: A Security Solution For A Smart City Using Internet of Things - Architecture Reference ModelDocument6 pagesSmartie: A Security Solution For A Smart City Using Internet of Things - Architecture Reference ModelKhyati ZalawadiaNo ratings yet
- Photodetector Operation TypesDocument15 pagesPhotodetector Operation TypesKhyati ZalawadiaNo ratings yet
- English VIIDocument2 pagesEnglish VIIKhyati ZalawadiaNo ratings yet
- 342870835-Ch3 - M2M - IoT Summary PDFDocument11 pages342870835-Ch3 - M2M - IoT Summary PDFKhyati ZalawadiaNo ratings yet
- Ex.1 ParametersDocument8 pagesEx.1 ParametersKhyati ZalawadiaNo ratings yet
- Homework 1Document1 pageHomework 1Khyati ZalawadiaNo ratings yet
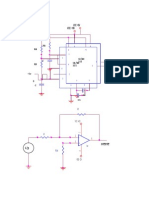
- Aim: To Design Integrator CKT Using Op-Amp (IC-741) - ApparatusDocument2 pagesAim: To Design Integrator CKT Using Op-Amp (IC-741) - ApparatusKhyati ZalawadiaNo ratings yet
- AIM Apparatus:: To Design Differentiator CKT Using Op-Amp (IC-741) .: BreadboardDocument2 pagesAIM Apparatus:: To Design Differentiator CKT Using Op-Amp (IC-741) .: BreadboardKhyati ZalawadiaNo ratings yet
- Ex.5 Substractor CKTDocument2 pagesEx.5 Substractor CKTKhyati ZalawadiaNo ratings yet
- Aim: To Design Integrator CKT Using Op-Amp (IC-741) - ApparatusDocument3 pagesAim: To Design Integrator CKT Using Op-Amp (IC-741) - ApparatusKhyati ZalawadiaNo ratings yet
- VCC +5V VCC +5V: I/p OutputDocument2 pagesVCC +5V VCC +5V: I/p OutputKhyati ZalawadiaNo ratings yet
- Optical Fibers: Structures, Waveguiding & FabricationDocument54 pagesOptical Fibers: Structures, Waveguiding & FabricationKhyati ZalawadiaNo ratings yet
- Lab report on periodic correlation functionsDocument22 pagesLab report on periodic correlation functionsKhyati ZalawadiaNo ratings yet
- Philippine Police Report Suicide InvestigationDocument2 pagesPhilippine Police Report Suicide InvestigationPAUL ALDANA82% (34)
- A61C00100 Communication and Employee Engagement by Mary Welsh 2Document19 pagesA61C00100 Communication and Employee Engagement by Mary Welsh 2Moeshfieq WilliamsNo ratings yet
- Dyna 2000 LiteDocument2 pagesDyna 2000 LiteRNKNo ratings yet
- PBS-P100 Facilities Standards GuideDocument327 pagesPBS-P100 Facilities Standards Guidecessna5538cNo ratings yet
- Basic LCI To High LCIDocument3 pagesBasic LCI To High LCIIonut VladNo ratings yet
- $R6RN116Document20 pages$R6RN116chinmay gulhaneNo ratings yet
- Tuberculin Skin Test: Facilitator GuideDocument31 pagesTuberculin Skin Test: Facilitator GuideTiwi NaloleNo ratings yet
- GRP Product CatalogueDocument57 pagesGRP Product CatalogueMulyana alcNo ratings yet
- AnhvancDocument108 pagesAnhvancvanchienha7766No ratings yet
- CURRICULUM AUDIT: GRADE 7 MATHEMATICSDocument5 pagesCURRICULUM AUDIT: GRADE 7 MATHEMATICSjohnalcuinNo ratings yet
- Siga-Cc1 12-22-2010Document6 pagesSiga-Cc1 12-22-2010Felipe LozanoNo ratings yet
- SS1c MIDTERMS LearningModuleDocument82 pagesSS1c MIDTERMS LearningModuleBryce VentenillaNo ratings yet
- NSX 100-630 User ManualDocument152 pagesNSX 100-630 User Manualagra04100% (1)
- Chanel SWOT AnalysisDocument5 pagesChanel SWOT AnalysisJeish KimNo ratings yet
- Reference - Unit-V PDFDocument128 pagesReference - Unit-V PDFRamesh BalakrishnanNo ratings yet
- The Unbounded MindDocument190 pagesThe Unbounded MindXtof ErNo ratings yet
- Stellar Structure and EvolutionDocument222 pagesStellar Structure and Evolutionjano71100% (2)
- MECHANICAL PROPERTIES OF SOLIDSDocument39 pagesMECHANICAL PROPERTIES OF SOLIDSAbdul Musavir100% (1)
- SeparatorDocument2 pagesSeparatormmk111No ratings yet
- ElectricalDocument30 pagesElectricalketerNo ratings yet
- Catalogo Head FixDocument8 pagesCatalogo Head FixANDREA RAMOSNo ratings yet
- Design & Construction of Substation 16P Painting System ComplianceDocument103 pagesDesign & Construction of Substation 16P Painting System ComplianceRamil LazNo ratings yet
- Quick Reference - HVAC (Part-1) : DECEMBER 1, 2019Document18 pagesQuick Reference - HVAC (Part-1) : DECEMBER 1, 2019shrawan kumarNo ratings yet
- Pure and Applied Analysis Problems Solved Step-by-StepDocument8 pagesPure and Applied Analysis Problems Solved Step-by-Stepalpha2122No ratings yet
- 2010 HSC Exam PhysicsDocument42 pages2010 HSC Exam PhysicsVictor345No ratings yet
- History and Development of the Foodservice IndustryDocument23 pagesHistory and Development of the Foodservice IndustryMaria Athenna MallariNo ratings yet
- Openness To Experience: Intellect & Openness: Lecture Notes 8Document8 pagesOpenness To Experience: Intellect & Openness: Lecture Notes 8Danilo Pesic100% (1)
- Emilio Aguinaldo CollegeDocument1 pageEmilio Aguinaldo CollegeRakeshKumar1987No ratings yet
- Galambos 1986Document18 pagesGalambos 1986gcoNo ratings yet
- Fashion Cycle StepsDocument2 pagesFashion Cycle Stepssaranya narenNo ratings yet