You might also like
- Design and Implementation of Space Vector PWM Inverter Based On A Low Cost MicrocontrollerDocument12 pagesDesign and Implementation of Space Vector PWM Inverter Based On A Low Cost MicrocontrollerHaider NeamaNo ratings yet
- Power Electronic (Pe) SystemDocument63 pagesPower Electronic (Pe) SystemFarid DafaNo ratings yet
- MTP 610 P 210 Manual Book LeonicsDocument2 pagesMTP 610 P 210 Manual Book LeonicsRido ManikNo ratings yet
- Intelligent Street Light Control While Obstacle PassingDocument32 pagesIntelligent Street Light Control While Obstacle Passingprashanthi_komatireddyNo ratings yet
- Dkg-109 Automatic Mains Failure UnitDocument46 pagesDkg-109 Automatic Mains Failure UnitmohsenNo ratings yet
- DSE2541 Installation Instructions PDFDocument2 pagesDSE2541 Installation Instructions PDFBERANGER DAVESNE DJOMALIA SIEWENo ratings yet
- Data Communication Lab GuideDocument105 pagesData Communication Lab GuideTalha HashmiNo ratings yet
- Manual Pluto DataDocument8 pagesManual Pluto DataDouglas RodriguesNo ratings yet
- Smart Relay: Ordering InformationDocument5 pagesSmart Relay: Ordering InformationbhagyeshNo ratings yet
- Fire Bird Software ManualDocument62 pagesFire Bird Software ManualEyantra_resourcesNo ratings yet
- Raptor Ser Ies High Perfor Mance Mo Tor DrivesDocument7 pagesRaptor Ser Ies High Perfor Mance Mo Tor DrivesJohn-Michael 'J' BillsNo ratings yet
- 2080-LC10-12DWD: M810 8di 4ai Config 4do Source 12V DC Catalogue NoDocument3 pages2080-LC10-12DWD: M810 8di 4ai Config 4do Source 12V DC Catalogue NojkhkbkbjbjhNo ratings yet
- Eb355 80 4Document44 pagesEb355 80 4David CochlinNo ratings yet
- dx-9100 Extended Digital ControllerDocument128 pagesdx-9100 Extended Digital Controllermubs73No ratings yet
- LL MSL 100G PDFDocument36 pagesLL MSL 100G PDFAlexandre FurtadoNo ratings yet
- NPS711B9Document504 pagesNPS711B9funkyznNo ratings yet
- Simatic Net S7-400 - Industrial Ethernet CP 443-1 (EX30)Document80 pagesSimatic Net S7-400 - Industrial Ethernet CP 443-1 (EX30)Ale LoveraNo ratings yet
- Three-Phase SCR Battery Charger Installation GuideDocument20 pagesThree-Phase SCR Battery Charger Installation GuideJohnTPNo ratings yet
- Adaptive Prediction Model Accuracy in The Control of Residential Energy ResourcesDocument6 pagesAdaptive Prediction Model Accuracy in The Control of Residential Energy ResourcesMario SammyNo ratings yet
- Siemens SIMATIC S5 Programmable Controller ManualDocument548 pagesSiemens SIMATIC S5 Programmable Controller Manualnasir_khan_24No ratings yet
- Mikromeia Board For PIC18FJDocument2 pagesMikromeia Board For PIC18FJmorghabiNo ratings yet
- Assembly Manual K2639Document32 pagesAssembly Manual K2639Asse NavNo ratings yet
- Digital Modified Sine Wave Inverter CircuitDocument6 pagesDigital Modified Sine Wave Inverter CircuitMaster RajaNo ratings yet
- Hardware Used - Power Supply and MicrocontrollerDocument46 pagesHardware Used - Power Supply and MicrocontrollerRocky SinghNo ratings yet
- How To Remove The SVCHOST - Exe Virus - EhowDocument5 pagesHow To Remove The SVCHOST - Exe Virus - EhowJelena ZafirovicNo ratings yet
- Closed loop V-Q control of PWM inverterDocument3 pagesClosed loop V-Q control of PWM invertersayedjavedalamNo ratings yet
- PDC Lab ManualDocument33 pagesPDC Lab ManualBhanu SriNo ratings yet
- RK Engineering Earth Leakage RelayDocument1 pageRK Engineering Earth Leakage RelaySEO BDMNo ratings yet
- PIC PWM ControllerDocument10 pagesPIC PWM Controllerkeitabando100% (2)
- Digital Control of Switching Power ConvertersDocument6 pagesDigital Control of Switching Power ConvertersNISHANT VATSNo ratings yet
- Letterbox Letter CounterDocument27 pagesLetterbox Letter CounterSAMEULNo ratings yet
- Digital Power-Conversion For The Analog EngineerDocument12 pagesDigital Power-Conversion For The Analog EngineerfjwoemcuNo ratings yet
- Full Control of A PWM DCAC Converter For AC Voltage RegulationDocument9 pagesFull Control of A PWM DCAC Converter For AC Voltage RegulationAndrés Felipe CelisNo ratings yet
- Zero Voltage Switching Resonant Power Devices by Bill AndrecakDocument28 pagesZero Voltage Switching Resonant Power Devices by Bill AndrecakRekhamtrNo ratings yet
- Digital Power Suply ControlDocument30 pagesDigital Power Suply ControlPaul RomanNo ratings yet
- Intelligent Power Supply Design SolutionsDocument16 pagesIntelligent Power Supply Design SolutionsMeselao Meselao MeselaoNo ratings yet
- Zero CrossingDocument16 pagesZero CrossingAryan KapsNo ratings yet
- 4000 Series Logic and Analog CircuitryDocument13 pages4000 Series Logic and Analog Circuitrysage.electconNo ratings yet
- AN296110 Current Sensing For Renewable EnergyDocument4 pagesAN296110 Current Sensing For Renewable EnergyPhạm Văn TưởngNo ratings yet
- Slis 140 ADocument33 pagesSlis 140 AAlvaro RoqueNo ratings yet
- 0-30 V DC Stabilized Power Supply With Current Control 0.002-3 ADocument8 pages0-30 V DC Stabilized Power Supply With Current Control 0.002-3 AWaseem AhmadNo ratings yet
- 820B Genset Controller ManualDocument12 pages820B Genset Controller ManualSaif Ali100% (1)
- DDS RF Signal Generator Design GuideDocument9 pagesDDS RF Signal Generator Design GuideIan McNairNo ratings yet
- AC Voltage Controllers for Inductive LoadsDocument15 pagesAC Voltage Controllers for Inductive LoadsSumukha KumarNo ratings yet
- PWM Inverters ExplainedDocument29 pagesPWM Inverters ExplainedandersonNo ratings yet
- Analog Devices CD ReferenceDocument8 pagesAnalog Devices CD ReferenceAcody Ie SyNo ratings yet
- Space Vector Pulse Width Modulation-Libre PDFDocument6 pagesSpace Vector Pulse Width Modulation-Libre PDFlongNo ratings yet
- SC100 Handbook A A4Document80 pagesSC100 Handbook A A4Difa Agfi Desebrio SyahNo ratings yet
- Compal LA-7903P PDFDocument61 pagesCompal LA-7903P PDFRicardo Segura RosarioNo ratings yet
- Traffic Light Control System ProjectDocument12 pagesTraffic Light Control System ProjectVinay ReddyNo ratings yet
- Switch Mode Power Supply (SMPS) Topologies (Part II)Document108 pagesSwitch Mode Power Supply (SMPS) Topologies (Part II)Willie WalkerNo ratings yet
- Nanovna: Very Tiny Handheld Vector Network Analyzer User GuideDocument12 pagesNanovna: Very Tiny Handheld Vector Network Analyzer User GuidemykillerdroneNo ratings yet
- Develop Ineo-250 Error C2557Document2 pagesDevelop Ineo-250 Error C2557Tariq MajeedNo ratings yet
- Three Phase SCR Power Converter Controlled by MicrocontrollerDocument8 pagesThree Phase SCR Power Converter Controlled by MicrocontrollerIsmael Ochoa JimenezNo ratings yet
- Ac Meters Part 1Document22 pagesAc Meters Part 1Vam ArmodiaNo ratings yet
- 3250 L532M DatasheetDocument2 pages3250 L532M DatasheetJavaid HosanyNo ratings yet
- Pure Sine Invereter InfoDocument107 pagesPure Sine Invereter Infoolawale gbadeboNo ratings yet
- Active Disturbance Rejection Control for Nonlinear Systems: An IntroductionFrom EverandActive Disturbance Rejection Control for Nonlinear Systems: An IntroductionNo ratings yet
- MATLAB Based Analysis and Simulation of Multilevel InvertersDocument3 pagesMATLAB Based Analysis and Simulation of Multilevel InvertersArunkumar ValusaNo ratings yet
- Experiment 11: NPN BJT Common Emitter CharacteristicsDocument7 pagesExperiment 11: NPN BJT Common Emitter CharacteristicsMalikAlrahabiNo ratings yet
- Signal ProjectDocument15 pagesSignal ProjectMalikAlrahabiNo ratings yet
- Exam1 Machine1 SEDocument1 pageExam1 Machine1 SEMalikAlrahabiNo ratings yet
- CSC610 Homework 1Document1 pageCSC610 Homework 1MalikAlrahabiNo ratings yet
- Real-time CCTV video compression, endoscope equipmentDocument7 pagesReal-time CCTV video compression, endoscope equipmentMalikAlrahabiNo ratings yet
- VOLTAGE DIVIDER BIASING EXPERIMENTDocument9 pagesVOLTAGE DIVIDER BIASING EXPERIMENTjohn50% (2)
- Lecture7 State Space RepresentationDocument37 pagesLecture7 State Space RepresentationMalikAlrahabiNo ratings yet
- EE221 Lab Experiment #4: Inverting Amplifier Investigation: Fall 2014Document5 pagesEE221 Lab Experiment #4: Inverting Amplifier Investigation: Fall 2014MalikAlrahabiNo ratings yet
- EE221 Lab Experiment #4: Inverting Amplifier Investigation: Fall 2014Document5 pagesEE221 Lab Experiment #4: Inverting Amplifier Investigation: Fall 2014MalikAlrahabiNo ratings yet
- Common Collector Amplifier: Experiment No. 15Document2 pagesCommon Collector Amplifier: Experiment No. 15MalikAlrahabiNo ratings yet
- BJT Common Emitter (CE) Amplifier: ObjectiveDocument3 pagesBJT Common Emitter (CE) Amplifier: ObjectiveMalikAlrahabiNo ratings yet
- MJ15015 (NPN) & MJ15016 (PNP) Silicon Complementary Transistors General Purpose High Power Audio, Disk Head Positioner For Linear ApplicationsDocument2 pagesMJ15015 (NPN) & MJ15016 (PNP) Silicon Complementary Transistors General Purpose High Power Audio, Disk Head Positioner For Linear ApplicationsRichard JoserNo ratings yet
- Purpose: Lab 4 BJT AmplifiersDocument3 pagesPurpose: Lab 4 BJT AmplifiersEstéfano GómezNo ratings yet
- APMA 0160 (A. Yew) Spring 2011 - Numerical Differentiation Finite DifferencesDocument2 pagesAPMA 0160 (A. Yew) Spring 2011 - Numerical Differentiation Finite DifferencesNazifa NawerNo ratings yet
- BK-6190 Auto Hematology Analyzer - Buy BIOBASEDocument1 pageBK-6190 Auto Hematology Analyzer - Buy BIOBASEMalikAlrahabiNo ratings yet
- Common Collector Amplifier: Experiment No. 15Document2 pagesCommon Collector Amplifier: Experiment No. 15MalikAlrahabiNo ratings yet
- CC and CB Amplifier AnalysisDocument3 pagesCC and CB Amplifier AnalysisMalikAlrahabiNo ratings yet
- VofilotopaliwDocument3 pagesVofilotopaliwMalikAlrahabiNo ratings yet
- ECE 2115 Tutorial 6 Designing A Common Collector AmplifierDocument2 pagesECE 2115 Tutorial 6 Designing A Common Collector AmplifierCooper1k3 -No ratings yet
- Appendix H Experiment 1: Measuring The Electrical Parameters of Motor 3Document5 pagesAppendix H Experiment 1: Measuring The Electrical Parameters of Motor 3MalikAlrahabiNo ratings yet
- Darlingtonpair AmpDocument3 pagesDarlingtonpair AmpSri krishna BNo ratings yet
- Common-Collector Amplifier: University of Utah Electrical & Computer Engineering DepartmentDocument5 pagesCommon-Collector Amplifier: University of Utah Electrical & Computer Engineering DepartmentMalikAlrahabiNo ratings yet
- Modelling & Simulation MCQ Questions & Answers - DapzoiDocument8 pagesModelling & Simulation MCQ Questions & Answers - DapzoiMalikAlrahabi100% (3)
- Lab 6Document3 pagesLab 6MalikAlrahabiNo ratings yet
- Simple Logic Circuits Lab ExperimentDocument4 pagesSimple Logic Circuits Lab ExperimentMalikAlrahabiNo ratings yet
- IRK.71, .91 SERIES: NEW ADD-A-pak Power Modules Thyristor/ Diode and Thyristor/ ThyristorDocument10 pagesIRK.71, .91 SERIES: NEW ADD-A-pak Power Modules Thyristor/ Diode and Thyristor/ ThyristorMalikAlrahabiNo ratings yet
- Matlab Programming Help: Example 1Document8 pagesMatlab Programming Help: Example 1Aum4Eng HelpNo ratings yet
- MJ15015 (NPN) & MJ15016 (PNP) Silicon Complementary Transistors General Purpose High Power Audio, Disk Head Positioner For Linear ApplicationsDocument2 pagesMJ15015 (NPN) & MJ15016 (PNP) Silicon Complementary Transistors General Purpose High Power Audio, Disk Head Positioner For Linear ApplicationsRichard JoserNo ratings yet
- Faculty of Applied Sciences: Bachelor of (Hons) Applied Sciences Technology Entrepreneurship (ENT600) Vonny Smart StrollerDocument5 pagesFaculty of Applied Sciences: Bachelor of (Hons) Applied Sciences Technology Entrepreneurship (ENT600) Vonny Smart StrollerMalikAlrahabiNo ratings yet
- Cus 9618fDocument2 pagesCus 9618fMalikAlrahabiNo ratings yet
- IR Thermometers ExplainedDocument4 pagesIR Thermometers Explainedsugandaraj522No ratings yet
- Manual CH660-01 (Spare Parts)Document34 pagesManual CH660-01 (Spare Parts)Carlos Fernando AlvarezNo ratings yet
- High Voltage - WikipediaDocument47 pagesHigh Voltage - WikipediaDamilare Daniel OlaniyiNo ratings yet
- Protector Sprinkler HeadsDocument2 pagesProtector Sprinkler HeadsEN ES VH CaliwagNo ratings yet
- QST30 GCS ConnectionsDocument5 pagesQST30 GCS ConnectionsOGNo ratings yet
- Dräger X-Am 2500 (MQG 0011) : Technical ManualDocument32 pagesDräger X-Am 2500 (MQG 0011) : Technical ManualHenrique RodriguesNo ratings yet
- RDSO Vendor List UpdatesDocument8 pagesRDSO Vendor List UpdatesSubrata MukherjeeNo ratings yet
- Gamut National High School: 1.1 Background of The StudyDocument16 pagesGamut National High School: 1.1 Background of The StudyAgosto GamingNo ratings yet
- Motor Compactera PPN13KB DatasheetDocument1 pageMotor Compactera PPN13KB DatasheetBabobrillNo ratings yet
- Ansi C39 5Document20 pagesAnsi C39 5Boris AguilarNo ratings yet
- SPS Grade 7 Module Week 1Document23 pagesSPS Grade 7 Module Week 1Cris Vincent OlvidaNo ratings yet
- Njb1 x1 ChintDocument1 pageNjb1 x1 ChintEdgar RamírezNo ratings yet
- Cartridge Solenoid Valve Type VR 032Document4 pagesCartridge Solenoid Valve Type VR 032ezeizabarrenaNo ratings yet
- Submittal: Series: HSC, Diesel EngineDocument14 pagesSubmittal: Series: HSC, Diesel EngineOmar MuqtharNo ratings yet
- Task 34 Booklet (Biomass Pyrolysis)Document20 pagesTask 34 Booklet (Biomass Pyrolysis)suputamadreNo ratings yet
- Tu-Flo 300 Compressor: Important! Please ReadDocument23 pagesTu-Flo 300 Compressor: Important! Please ReadOdai AlsaafinNo ratings yet
- Fireball AFE PDFDocument17 pagesFireball AFE PDFRanjan TusharNo ratings yet
- Sauer-Danfoss Next Generation Hydrostatic Transmission ProductsDocument50 pagesSauer-Danfoss Next Generation Hydrostatic Transmission ProductsJose Manuel Barroso PantojaNo ratings yet
- PWC 2016 Volume 1 (SPARK) - Flat Rate - FR21Y016Document36 pagesPWC 2016 Volume 1 (SPARK) - Flat Rate - FR21Y016Théo GousseyNo ratings yet
- Ø25 Illuminated Push Buttons IDEC TWS Series CATALOG 3961Document35 pagesØ25 Illuminated Push Buttons IDEC TWS Series CATALOG 3961Đào MạnhNo ratings yet
- TutorialDocument3 pagesTutorialHarits Surya FinmuroNo ratings yet
- Sci 8 L5 - Kinetic EnergyDocument12 pagesSci 8 L5 - Kinetic EnergyTorres Jhon Chriz GabrielNo ratings yet
- Corken CompressorI100Document16 pagesCorken CompressorI100adriansya7No ratings yet
- Bimetallic Thermometer Seminar ReportDocument2 pagesBimetallic Thermometer Seminar ReportAman RajNo ratings yet
- Shadows NotesDocument4 pagesShadows NotesdodoNo ratings yet
- How To FlipDocument3 pagesHow To FlipBen JacksonNo ratings yet
- ProjectDocument17 pagesProjectroselle cordovaNo ratings yet
- FT - IBP+ - HO - UV - EN - With UV SensorDocument3 pagesFT - IBP+ - HO - UV - EN - With UV SensorAdel AshamallaNo ratings yet
- Implementation of The RCM Approach at Xa0103048 Edf NPPS: Current StatusDocument8 pagesImplementation of The RCM Approach at Xa0103048 Edf NPPS: Current StatusSamNo ratings yet
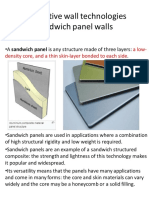
- Alternative Wall Technologies-Sandwitch PanelsDocument14 pagesAlternative Wall Technologies-Sandwitch PanelsDiya MakanurNo ratings yet