You might also like
- MCQ Questions For Class 8 Science Chapter 17 Stars and The Solar System With AnswersDocument12 pagesMCQ Questions For Class 8 Science Chapter 17 Stars and The Solar System With AnswersGopinathan MNo ratings yet
- Question & Answers For Microcontrollers and Its Applications Btech Iv-I Semester (Ece A & B)Document13 pagesQuestion & Answers For Microcontrollers and Its Applications Btech Iv-I Semester (Ece A & B)Krapa Sai PraveenNo ratings yet
- PowerFlex OS v3.6 CLI Reference GuideDocument247 pagesPowerFlex OS v3.6 CLI Reference GuideAvi KinetNo ratings yet
- Moshell For Msrbs Du&BbDocument394 pagesMoshell For Msrbs Du&BbAnonymous XZnkpMec100% (2)
- Conceptual Programming: Conceptual Programming: Learn Programming the old way!From EverandConceptual Programming: Conceptual Programming: Learn Programming the old way!No ratings yet
- A Complete Study Guide For AWS Certified Solutions Architect Associate Exam PDFDocument7 pagesA Complete Study Guide For AWS Certified Solutions Architect Associate Exam PDFAkshay SharmaNo ratings yet
- 8051 Instruction Set: Data Moving or Handling InstructionsDocument3 pages8051 Instruction Set: Data Moving or Handling InstructionsDHANANJAY POPAT MANENo ratings yet
- 8051 Instruction Set: FacebooktwitterlinkedinredditpinterestshareDocument13 pages8051 Instruction Set: FacebooktwitterlinkedinredditpinterestshareManjunath KV Assistant Professor (CSE)No ratings yet
- Instruction SetDocument18 pagesInstruction SetGirl OnFireNo ratings yet
- Instruction SetDocument22 pagesInstruction SetmeghaNo ratings yet
- 8051 Instruction - SetDocument48 pages8051 Instruction - SetJibu JoseNo ratings yet
- Microcontroller Codes For PracticeDocument10 pagesMicrocontroller Codes For PracticeAditya KulkarniNo ratings yet
- 8051 Notes 3rd Unit PDFDocument36 pages8051 Notes 3rd Unit PDFfwefNo ratings yet
- 8051 Programming Sec B Elect M&MDocument25 pages8051 Programming Sec B Elect M&MAbujar ShaikhNo ratings yet
- 8051 Instruction SetDocument47 pages8051 Instruction SetSanthosh CricketNo ratings yet
- Instruction Set of 8051Document33 pagesInstruction Set of 8051Swetha RamasamyNo ratings yet
- UNIT 2 - ppt200910Document73 pagesUNIT 2 - ppt200910Yogesh GowdaNo ratings yet
- Moving DataDocument30 pagesMoving DataJoJoMoNo ratings yet
- 8051microcontroller Ayala (2) 59 114Document56 pages8051microcontroller Ayala (2) 59 114Kareem QpNo ratings yet
- Instruction Set 8051 - v1Document10 pagesInstruction Set 8051 - v1avinashNo ratings yet
- Programming Model of 8051Document45 pagesProgramming Model of 8051Mayuri ChebleNo ratings yet
- Fundamentals of Microcontroller & Its Application: Unit-IiDocument10 pagesFundamentals of Microcontroller & Its Application: Unit-IiRajan PatelNo ratings yet
- 6 8051-AssemblyDocument18 pages6 8051-AssemblyKritika SinghNo ratings yet
- Addressing Mode of 8051Document11 pagesAddressing Mode of 8051Harsh RajNo ratings yet
- Instruction Format 8051Document26 pagesInstruction Format 8051alex24arulNo ratings yet
- Introduction To 8085 MPDocument16 pagesIntroduction To 8085 MPDeepikaNo ratings yet
- HTTPDocument5 pagesHTTPkamalakarbNo ratings yet
- Instruction Set Summary: (I. Scott Mackenzie)Document12 pagesInstruction Set Summary: (I. Scott Mackenzie)saravanan_KLUNo ratings yet
- Topic 4 Assembly Language Programming (ISMAIL - FKEUTM 20192020)Document107 pagesTopic 4 Assembly Language Programming (ISMAIL - FKEUTM 20192020)Aya AmirNo ratings yet
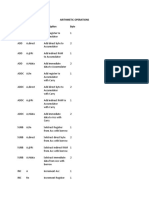
- Asembbly Operation & Sintax Program Arithmetic Operations Mnemonic Description Bytes CyclesDocument6 pagesAsembbly Operation & Sintax Program Arithmetic Operations Mnemonic Description Bytes CyclesArief HamidNo ratings yet
- 8051 Add Sub ProgramDocument4 pages8051 Add Sub ProgramGopinathan MNo ratings yet
- Microcontroller Instruction SetDocument73 pagesMicrocontroller Instruction Set4SI21EC037 MONOJ S BNo ratings yet
- 8051 Instruction SetDocument5 pages8051 Instruction Setarul0% (1)
- MCS-51 Instruction: Arithmetic OperationsDocument3 pagesMCS-51 Instruction: Arithmetic OperationsAgus GunawanNo ratings yet
- 6 - ES - 8051 MC - ProgrammingDocument83 pages6 - ES - 8051 MC - ProgrammingSaket GoluNo ratings yet
- Addressing Modes 8051Document37 pagesAddressing Modes 80514SI21EC037 MONOJ S BNo ratings yet
- Microcontroller Lab ManualDocument57 pagesMicrocontroller Lab ManualTrinetra mNo ratings yet
- Arithmetic OperationsDocument2 pagesArithmetic OperationsRoselee Ann MontevirgenNo ratings yet
- Assembly Language ProgrammingDocument11 pagesAssembly Language ProgrammingAnonymous 4mPIMAL7zNo ratings yet
- Mci 4Document9 pagesMci 4Het PatelNo ratings yet
- Introduction To Address ModesDocument9 pagesIntroduction To Address ModeskamalakarbNo ratings yet
- Ece3430 Lecture 04Document17 pagesEce3430 Lecture 04Msk MskNo ratings yet
- Himpunan Instruksi 8051Document2 pagesHimpunan Instruksi 8051Hermin Kartika SariNo ratings yet
- 8051 Codding MapDocument1 page8051 Codding MapSelam12No ratings yet
- It 8051Document3 pagesIt 8051appalaraju2010No ratings yet
- UG - EC303 DSP Part-3 Fixed Point DSP Addressing Modes - PrintDocument25 pagesUG - EC303 DSP Part-3 Fixed Point DSP Addressing Modes - PrintShreyas TaterNo ratings yet
- 02.addressing ModesDocument10 pages02.addressing Modessasi_kar_1No ratings yet
- Instructions SetDocument81 pagesInstructions Setchintu333No ratings yet
- Microcontroller - 10ES42Document13 pagesMicrocontroller - 10ES42Laxman nadigNo ratings yet
- 8051 Addressing ModesDocument73 pages8051 Addressing ModesKUSHAGRA GUPTA 13BEE0102No ratings yet
- Set de Instrucciones DLXDocument2 pagesSet de Instrucciones DLXe1s1v09092023No ratings yet
- Addressing Modes & Instructions Set of 8051 Micro ControllerDocument29 pagesAddressing Modes & Instructions Set of 8051 Micro ControllerManjunath KV Assistant Professor (CSE)No ratings yet
- Addressing Modes in 8051Document7 pagesAddressing Modes in 8051Sundar SathappanNo ratings yet
- Lecture 4Document18 pagesLecture 4Ritesh KumarNo ratings yet
- Lecture 4Document15 pagesLecture 4bndgdd cncncjNo ratings yet
- Control Transfer Instructions and Programming Using 8051 MicrocontrolleDocument72 pagesControl Transfer Instructions and Programming Using 8051 MicrocontrollePujaChaudhuryNo ratings yet
- Module - 2: 8051 Instruction SetDocument39 pagesModule - 2: 8051 Instruction SetPramod PatilNo ratings yet
- Register Structure and Addressing ModesDocument8 pagesRegister Structure and Addressing ModesMruthika KumaraswamyNo ratings yet
- Immediate Addressing Direct Addressing Indirect Addressing External Direct Code IndirectDocument4 pagesImmediate Addressing Direct Addressing Indirect Addressing External Direct Code IndirectJayshil ParekhNo ratings yet
- ROUTING INFORMATION PROTOCOL: RIP DYNAMIC ROUTING LAB CONFIGURATIONFrom EverandROUTING INFORMATION PROTOCOL: RIP DYNAMIC ROUTING LAB CONFIGURATIONNo ratings yet
- LEARN MPLS FROM SCRATCH PART-B: A Beginners guide to next level of networkingFrom EverandLEARN MPLS FROM SCRATCH PART-B: A Beginners guide to next level of networkingNo ratings yet
- 3 8th Standard Term 3 5 in 1 Sura Guides Notes Download Tamil Medium 2Document121 pages3 8th Standard Term 3 5 in 1 Sura Guides Notes Download Tamil Medium 2Gopinathan MNo ratings yet
- Data TransferDocument4 pagesData TransferGopinathan MNo ratings yet
- Unit - I Difference Between Microprocessor and MicrocontrollerDocument30 pagesUnit - I Difference Between Microprocessor and MicrocontrollerGopinathan MNo ratings yet
- Es IiiDocument12 pagesEs IiiGopinathan MNo ratings yet
- 2 Chapter 1. Introduction To The Mc9S08Qg4/8 HardwareDocument3 pages2 Chapter 1. Introduction To The Mc9S08Qg4/8 HardwareGopinathan MNo ratings yet
- Session Paper Number of Questions Marks Duration: First I 50 ×2 100 1 Hours 100 Questions 100×2 200 2 HoursDocument5 pagesSession Paper Number of Questions Marks Duration: First I 50 ×2 100 1 Hours 100 Questions 100×2 200 2 HoursGopinathan MNo ratings yet
- Provisional Application FormDocument1 pageProvisional Application FormGopinathan MNo ratings yet
- 17feb Physics PiiiDocument19 pages17feb Physics PiiiGopinathan MNo ratings yet
- Cach25C - Chemistry - Ii: Öpõkuqøn Dû Gßóõà Gßú?Document6 pagesCach25C - Chemistry - Ii: Öpõkuqøn Dû Gßóõà Gßú?Gopinathan MNo ratings yet
- Periyar University: Procedure To Apply For CertificatesDocument2 pagesPeriyar University: Procedure To Apply For CertificatesGopinathan MNo ratings yet
- PG TRB PHYSICS STUDY MATERIAL - PDF'Document150 pagesPG TRB PHYSICS STUDY MATERIAL - PDF'Gopinathan M83% (12)
- Paper-III Paper-III Paper-III Paper-III Chemical Science Chemical Science Chemical Science Chemical ScienceDocument32 pagesPaper-III Paper-III Paper-III Paper-III Chemical Science Chemical Science Chemical Science Chemical ScienceGopinathan MNo ratings yet
- Chemical Science Chemical Science Chemical Science Chemical ScienceDocument32 pagesChemical Science Chemical Science Chemical Science Chemical ScienceGopinathan MNo ratings yet
- Engineering Materials and Metallurgy Questions For Campus Interviews - SanfoundryDocument9 pagesEngineering Materials and Metallurgy Questions For Campus Interviews - SanfoundryGopinathan MNo ratings yet
- Physical Science: Signature and Name of InvigilatorDocument28 pagesPhysical Science: Signature and Name of InvigilatorGopinathan MNo ratings yet
- Mars Earth Mercury VenusDocument7 pagesMars Earth Mercury VenusGopinathan MNo ratings yet
- 2 Marks MPDocument15 pages2 Marks MPGopinathan MNo ratings yet
- 8 Class Stars and Solar System The Universe MCQ Formative Test Paper With SolutionDocument6 pages8 Class Stars and Solar System The Universe MCQ Formative Test Paper With SolutionGopinathan MNo ratings yet
- Electronics Lab 2019 G-UmadeviDocument61 pagesElectronics Lab 2019 G-UmadeviGopinathan MNo ratings yet
- Rockstar JunkiesDocument8 pagesRockstar Junkiesapi-3811622No ratings yet
- Java Notes-2.Document142 pagesJava Notes-2.killerboy5652No ratings yet
- SSL Certificate ImplementationDocument3 pagesSSL Certificate ImplementationJaved AlamNo ratings yet
- JN0-103 Junos, Associate (JNCIA-Junos) Juniper 50 v2021-02-26 119 649Document17 pagesJN0-103 Junos, Associate (JNCIA-Junos) Juniper 50 v2021-02-26 119 649Amine BoubakeurNo ratings yet
- Windows Server Interview Questions and Answers PDF - Google SearchDocument2 pagesWindows Server Interview Questions and Answers PDF - Google SearchAshish kumar mishraNo ratings yet
- 12 CS Practical File Term-2 2023-24Document18 pages12 CS Practical File Term-2 2023-24preeyanshmehtaNo ratings yet
- Lab Exercise - Lesson 2Document2 pagesLab Exercise - Lesson 2Cj Nicole JacintoNo ratings yet
- UNIT II Application Development: TCP Echo ServerDocument38 pagesUNIT II Application Development: TCP Echo ServerSundariNo ratings yet
- Camouflage Technique Based Multifunctional Army RobotDocument3 pagesCamouflage Technique Based Multifunctional Army RobotKarthik SNo ratings yet
- Lesson 4Document9 pagesLesson 4Ahmed MujtabaNo ratings yet
- Software Requirement Specification: Orchid Auction SystemDocument17 pagesSoftware Requirement Specification: Orchid Auction SystemSáng Đặng NgọcNo ratings yet
- Reanibex 300 - Presentacion 2013Document17 pagesReanibex 300 - Presentacion 2013Josiel MarlosNo ratings yet
- Compiler Construction CS-4207: Instructor Name: Atif IshaqDocument13 pagesCompiler Construction CS-4207: Instructor Name: Atif IshaqFaisal ShehzadNo ratings yet
- CF ProjectDocument11 pagesCF ProjectapakkiNo ratings yet
- Amcrest+Http+API+9 202Document651 pagesAmcrest+Http+API+9 202nmccomputerNo ratings yet
- Casio wk1800 Keyboard SMDocument44 pagesCasio wk1800 Keyboard SMღ•Mika Chan•ღNo ratings yet
- Object-Oriented and Classical Software Engineering: Stephen R. SchachDocument63 pagesObject-Oriented and Classical Software Engineering: Stephen R. Schachgoflux pwnsNo ratings yet
- Mobile Attendance SystemDocument17 pagesMobile Attendance Systemsamten wangchukNo ratings yet
- Application Manual RV-3028-C7: Extreme Low Power Real-Time Clock Module With I C-Bus InterfaceDocument116 pagesApplication Manual RV-3028-C7: Extreme Low Power Real-Time Clock Module With I C-Bus InterfaceNelson Pimiento SerranoNo ratings yet
- OCI-IAM LabDocument15 pagesOCI-IAM LabPatrickNo ratings yet
- 25AA256/25LC256: 256K SPI Bus Serial EEPROMDocument32 pages25AA256/25LC256: 256K SPI Bus Serial EEPROMmelquisedecNo ratings yet
- r05410310 Artificial IntelligenceDocument4 pagesr05410310 Artificial IntelligenceSRINIVASA RAO GANTANo ratings yet
- Progress Test 02Document21 pagesProgress Test 02andrewlaurenNo ratings yet
- App SRM Unit 4 NotesDocument48 pagesApp SRM Unit 4 NotesHarshit BatraNo ratings yet
- Functions of The OSDocument1 pageFunctions of The OSÑámè ŢħómäŝNo ratings yet
- Web Technology LabDocument29 pagesWeb Technology Labnishant99djNo ratings yet
- CH 03 - OS8e - EdtDocument57 pagesCH 03 - OS8e - EdtAfiq AimanNo ratings yet