You might also like
- Thern Full Line CatalogDocument96 pagesThern Full Line CatalogMena Fran Ja0% (1)
- Bitcoin and Lightning Network on Raspberry Pi: Running Nodes on Pi3, Pi4 and Pi ZeroFrom EverandBitcoin and Lightning Network on Raspberry Pi: Running Nodes on Pi3, Pi4 and Pi ZeroNo ratings yet
- Oil Pan Removal - Installation (MZR-CD (RF Turbo) )Document6 pagesOil Pan Removal - Installation (MZR-CD (RF Turbo) )Anonymous C6Vaod9No ratings yet
- ESC - Center - Board: Flight - Controller - Board IMU - Board GPS - BoardDocument24 pagesESC - Center - Board: Flight - Controller - Board IMU - Board GPS - Boardmartinez_cvmNo ratings yet
- Repair of Yuneec CG03 With New Style Slide-On MountDocument6 pagesRepair of Yuneec CG03 With New Style Slide-On Mountridwansaungnage_5580No ratings yet
- Beginning Robotics with Raspberry Pi and Arduino: Using Python and OpenCVFrom EverandBeginning Robotics with Raspberry Pi and Arduino: Using Python and OpenCVNo ratings yet
- Advanced Home Automation Using Raspberry Pi: Building Custom Hardware, Voice Assistants, and Wireless NodesFrom EverandAdvanced Home Automation Using Raspberry Pi: Building Custom Hardware, Voice Assistants, and Wireless NodesNo ratings yet
- 2005 TJ PowertrainDocument502 pages2005 TJ PowertrainArt Doe100% (1)
- DJi F450 Quadcopter How To Build Home BuiltDocument12 pagesDJi F450 Quadcopter How To Build Home BuiltgenmassaNo ratings yet
- Caminadora 1622733 Service ManualDocument33 pagesCaminadora 1622733 Service ManualpasantitoNo ratings yet
- Star X Decoder-ManualDocument26 pagesStar X Decoder-ManualKaty WhiteNo ratings yet
- Biomedical Sensors Data Acquisition with LabVIEW: Effective Way to Integrate Arduino with LabViewFrom EverandBiomedical Sensors Data Acquisition with LabVIEW: Effective Way to Integrate Arduino with LabViewNo ratings yet
- Auto AppsDocument40 pagesAuto Appsrparr9No ratings yet
- 15 Arduino Uno Breadboard Projects PDFDocument20 pages15 Arduino Uno Breadboard Projects PDFmohamed TohamyNo ratings yet
- Gs 3 MDocument316 pagesGs 3 MNazielNo ratings yet
- The Definitive Guide to How Computers Do Math: Featuring the Virtual DIY CalculatorFrom EverandThe Definitive Guide to How Computers Do Math: Featuring the Virtual DIY CalculatorNo ratings yet
- How To Build A DIY Electric Bicycle Lithium Battery From 18650 CellsDocument91 pagesHow To Build A DIY Electric Bicycle Lithium Battery From 18650 CellsScott WNo ratings yet
- How To Convert A Laptop LCD Into An External MonitorDocument1 pageHow To Convert A Laptop LCD Into An External MonitorMomo PierreNo ratings yet
- Low Power RF GuideDocument45 pagesLow Power RF Guidedormevu0% (1)
- DIY Arduino Battery Capacity Tester - V1.0 - 12 Steps (With Pictures) - InstructablesDocument32 pagesDIY Arduino Battery Capacity Tester - V1.0 - 12 Steps (With Pictures) - Instructablesbnc1100% (1)
- Commercial and Industrial Internet of Things Applications with the Raspberry Pi: Prototyping IoT SolutionsFrom EverandCommercial and Industrial Internet of Things Applications with the Raspberry Pi: Prototyping IoT SolutionsNo ratings yet
- Scuf, Modjunkiez Pro Controller and DIY.Document4 pagesScuf, Modjunkiez Pro Controller and DIY.MODCENTRALUSANo ratings yet
- Boot Reference ListDocument6 pagesBoot Reference ListAdal Broke TruthsNo ratings yet
- KK 2.1 Multi-Rotor Control Board: User GuideDocument14 pagesKK 2.1 Multi-Rotor Control Board: User GuideSandal MasjidNo ratings yet
- Sq11 Full HD 1080p Mini DV Camera Manual - 028Document1 pageSq11 Full HD 1080p Mini DV Camera Manual - 028trebronX100% (1)
- Data Science with Raspberry Pi: Real-Time Applications Using a Localized CloudFrom EverandData Science with Raspberry Pi: Real-Time Applications Using a Localized CloudNo ratings yet
- Electronics Manufacturing Service A Complete Guide - 2019 EditionFrom EverandElectronics Manufacturing Service A Complete Guide - 2019 EditionNo ratings yet
- Build A Microwave Transformer Homemade WelderDocument24 pagesBuild A Microwave Transformer Homemade Weldermarius_danila8736No ratings yet
- Smart Home Security System Using Iot, Face Recognition and Raspberry PiDocument4 pagesSmart Home Security System Using Iot, Face Recognition and Raspberry PiBhanu B PrakashNo ratings yet
- 5w PDFDocument211 pages5w PDFJuan Marcelo Rodriguez PereyraNo ratings yet
- Service DEH-4000UB, 3050UBDocument77 pagesService DEH-4000UB, 3050UBmarek790524No ratings yet
- Service Manual: TX-SR607 (B/S/G)Document128 pagesService Manual: TX-SR607 (B/S/G)Coso Moto100% (1)
- 10kW All-In-One The Hybrid Inverter User Manual: Important NoticeDocument54 pages10kW All-In-One The Hybrid Inverter User Manual: Important NoticeAbdulrehman SoomroNo ratings yet
- Volvo Penta Aquamatic80 HandbookDocument49 pagesVolvo Penta Aquamatic80 HandbookautobritaiNo ratings yet
- Unbrick MTK PDFDocument3 pagesUnbrick MTK PDFAbraham SwayNo ratings yet
- XBOX 360 Jtag and Modifying TutorialDocument31 pagesXBOX 360 Jtag and Modifying TutorialNumair Imran100% (2)
- STEPPER MOTOR CONTROL USING INFERA REDMinor ProjectDocument22 pagesSTEPPER MOTOR CONTROL USING INFERA REDMinor ProjectJet's100% (2)
- Seikitech HW User Manual, T SeriesDocument12 pagesSeikitech HW User Manual, T SeriesKen Dizzeru0% (1)
- Switch Mode Power Supply 12V-35VDocument13 pagesSwitch Mode Power Supply 12V-35VRgcp RgcpNo ratings yet
- Circuit Cellar 2014.11Document84 pagesCircuit Cellar 2014.11Endréné PócsikNo ratings yet
- Wuinches ThernDocument52 pagesWuinches Thernedark2009No ratings yet
- R-Net PC Programmer ManualDocument20 pagesR-Net PC Programmer Manualb4321nNo ratings yet
- Installation Ac UnitDocument75 pagesInstallation Ac Unitkaliman2010No ratings yet
- Gxworks 2 Simple ProjectDocument106 pagesGxworks 2 Simple ProjectRobinson Velasco NavalesNo ratings yet
- DC Motor Control With Rotary Encoder and PIC MCU - Mikroc ProjectsDocument1 pageDC Motor Control With Rotary Encoder and PIC MCU - Mikroc ProjectsHeroe APNo ratings yet
- SDR Self Learn LinksDocument12 pagesSDR Self Learn LinksAshish SNo ratings yet
- PHILIPS Chassis EP1.1U AA Service ManualDocument101 pagesPHILIPS Chassis EP1.1U AA Service ManualtecatronicNo ratings yet
- E Instruction Sk3010 3320Document16 pagesE Instruction Sk3010 3320Abdalhakeem AlturkyNo ratings yet
- (DFR0767) V1.0 DimensionDocument1 page(DFR0767) V1.0 DimensionlechurzNo ratings yet
- A71ch SDS PDFDocument29 pagesA71ch SDS PDFlechurzNo ratings yet
- Sandisk X400 SSD (Solid State Drive) : The World'S First 1Tb, Single-Sided SSDDocument2 pagesSandisk X400 SSD (Solid State Drive) : The World'S First 1Tb, Single-Sided SSDlechurzNo ratings yet
- Secure Authenticator IC: Rev. 1 - 25 July 2018 Product Short Data SheetDocument18 pagesSecure Authenticator IC: Rev. 1 - 25 July 2018 Product Short Data SheetlechurzNo ratings yet
- M, 2 SignalsDocument6 pagesM, 2 SignalslechurzNo ratings yet
- Key B Key E Key M: 0.5Mm PitchDocument3 pagesKey B Key E Key M: 0.5Mm PitchlechurzNo ratings yet
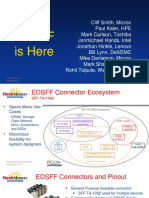
- Edsff Is Here: Santa Clara, CA August 2018 1Document7 pagesEdsff Is Here: Santa Clara, CA August 2018 1lechurzNo ratings yet
- Eng SS 114-115006 B 114-115006 Rev B PDFDocument8 pagesEng SS 114-115006 B 114-115006 Rev B PDFlechurzNo ratings yet
- Securosis Guide To Rsac 2015Document36 pagesSecurosis Guide To Rsac 2015lechurzNo ratings yet
- Listener Feedback #207: Transcript of Episode #496Document46 pagesListener Feedback #207: Transcript of Episode #496lechurzNo ratings yet
- Ds1963S Sha Ibutton: Special FeaturesDocument37 pagesDs1963S Sha Ibutton: Special FeaturesFariasNo ratings yet
- Clinical VideoconferenceDocument275 pagesClinical VideoconferenceManuel Humberto Herrera ArgiróNo ratings yet
- MB Manual Ga-H61m-S1 v2.0 eDocument40 pagesMB Manual Ga-H61m-S1 v2.0 ehsecure17No ratings yet
- Avr EnsambladorDocument24 pagesAvr Ensambladorfabio3055No ratings yet
- Fundamentals of Computers (1) For Hotel ManagementDocument100 pagesFundamentals of Computers (1) For Hotel ManagementLohitesh JenaNo ratings yet
- Unlocking Athlon II - Phenom II Cores and L3 CacheDocument9 pagesUnlocking Athlon II - Phenom II Cores and L3 CacheDamir PantelicNo ratings yet
- Motherboard Manual Ga Gc230d eDocument72 pagesMotherboard Manual Ga Gc230d evadolanNo ratings yet
- MS-17F2 - MS-17F21 Rev1.0Document59 pagesMS-17F2 - MS-17F21 Rev1.0Pavel RostovtsevNo ratings yet
- Device Driver: Operating SystemsDocument10 pagesDevice Driver: Operating SystemsvinranNo ratings yet
- Sun Cluster Software Install Guide SolarisDocument314 pagesSun Cluster Software Install Guide SolarisbargujarNo ratings yet
- Computing Ds 8Gb DDR4 (A-Ver) Based RDIMMs (Rev.1.2)Document75 pagesComputing Ds 8Gb DDR4 (A-Ver) Based RDIMMs (Rev.1.2)Caja FuegoNo ratings yet
- Hydrasynth Manager Guide 2.0.0Document10 pagesHydrasynth Manager Guide 2.0.0williamlee666No ratings yet
- Motherboard Manual Ga-g31m-Es2l Es2c eDocument88 pagesMotherboard Manual Ga-g31m-Es2l Es2c eLuis Mejias PastorNo ratings yet
- Computer Hardware and Software ExplainedDocument2 pagesComputer Hardware and Software ExplainedAbhishek VijayNo ratings yet
- What is a Real-Time Operating System (RTOS) and How Does it Differ from a General Purpose OSDocument6 pagesWhat is a Real-Time Operating System (RTOS) and How Does it Differ from a General Purpose OSnagarajNo ratings yet
- Xeon D 1500 Datasheet Vol 1Document608 pagesXeon D 1500 Datasheet Vol 1Jose Ramon Oviedo OrdoñezNo ratings yet
- 1500 Computer One Liners Questions in EnglishDocument62 pages1500 Computer One Liners Questions in EnglishNaman MahajanNo ratings yet
- HP CompaqDocument80 pagesHP CompaqsamuzaferNo ratings yet
- Components of System UnitDocument8 pagesComponents of System UnitIvan Louie Cruto100% (1)
- SUMO Fire Fighting KitDocument23 pagesSUMO Fire Fighting KitKlare MontefalcoNo ratings yet
- Overview of Computers & Programming LanguagesDocument15 pagesOverview of Computers & Programming Languagesricardo enriquezNo ratings yet
- PIC18F4550 Timer Compare Mode - PIC ControllersDocument7 pagesPIC18F4550 Timer Compare Mode - PIC ControllersKrishanu Modak50% (2)
- Instruction cycle timeDocument55 pagesInstruction cycle timereema yadavNo ratings yet
- Allwinner R16 User Manual V1.2Document529 pagesAllwinner R16 User Manual V1.2Edgar MartinezNo ratings yet
- RAM TechnologiesDocument25 pagesRAM TechnologiesAmarnath M DamodaranNo ratings yet
- 1SFC132367M0201 PSE Internal Modbus RTUDocument22 pages1SFC132367M0201 PSE Internal Modbus RTUAhmed OsmanNo ratings yet
- Atmega-328 Is Basically An Advanced Virtual Risc (Avr) Micro-Controller. It Supports The Data UpDocument3 pagesAtmega-328 Is Basically An Advanced Virtual Risc (Avr) Micro-Controller. It Supports The Data Upsubi tsNo ratings yet
- Schematic document for Dell/Compal laptop models BBV00 and BBV10Document70 pagesSchematic document for Dell/Compal laptop models BBV00 and BBV10Luis EstradaNo ratings yet
- Chapter 1 DrillsimDocument10 pagesChapter 1 DrillsimMehdi SoltaniNo ratings yet
- Storage Migration and Consolidation With IBM Total Storage Products Redp3888Document28 pagesStorage Migration and Consolidation With IBM Total Storage Products Redp3888bupbechanhNo ratings yet