You might also like
- Interrupted Flow Facilities in Which External: Excessive DelaysDocument79 pagesInterrupted Flow Facilities in Which External: Excessive DelaysBashar ArshedNo ratings yet
- CE 403 Lecture NotesDocument67 pagesCE 403 Lecture NotesSimran Radheshyam Soni100% (1)
- Intersection AnalysisDocument59 pagesIntersection AnalysisfuchiguisNo ratings yet
- CENG 6302 - CH 5-1 - Basic Principles of Intersection Signalization PDFDocument49 pagesCENG 6302 - CH 5-1 - Basic Principles of Intersection Signalization PDFadane mekonnenNo ratings yet
- Saturation Flow and Delay Study - ManualDocument5 pagesSaturation Flow and Delay Study - ManualDR LuotanNo ratings yet
- Unit 5 ADVANCED TRAFFIC MANAGEMENTDocument53 pagesUnit 5 ADVANCED TRAFFIC MANAGEMENTvegen75457No ratings yet
- Unsignalized Intersection TheoryDocument49 pagesUnsignalized Intersection TheoryChao YangNo ratings yet
- " Design Principles of Traffic Signal ": Tatva Institute of Technological StudiesDocument31 pages" Design Principles of Traffic Signal ": Tatva Institute of Technological StudiesEng-Mohammed TwiqatNo ratings yet
- Modification of Webster's Minimum Delay Cycle Length Equation Based On HCM 2000Document27 pagesModification of Webster's Minimum Delay Cycle Length Equation Based On HCM 2000Amul ShresthaNo ratings yet
- Unit E - Traffic Analysis at Signalized Intersections - Part IIDocument37 pagesUnit E - Traffic Analysis at Signalized Intersections - Part IIanthony mikhaelNo ratings yet
- Chapt 4 Signal Taffic MGT at IntersectionDocument37 pagesChapt 4 Signal Taffic MGT at Intersectionskalema34No ratings yet
- Desig SignalizedDocument14 pagesDesig SignalizedNabeelSaleemNo ratings yet
- Lecture 11 Design of Signalised IntersectionsDocument37 pagesLecture 11 Design of Signalised IntersectionsRespicus RJNo ratings yet
- TRAN5421M - Road Geometry & Infrastructure: Some Reference DocumentsDocument21 pagesTRAN5421M - Road Geometry & Infrastructure: Some Reference DocumentsDiyoke HenryNo ratings yet
- 09-Lecture 08Document22 pages09-Lecture 08joe hassNo ratings yet
- Unsignalised Intersection CapacityDocument13 pagesUnsignalised Intersection CapacityAram AvetisyanNo ratings yet
- Timing Traffic Signal Change Intervals Based On Driver BehaviorDocument11 pagesTiming Traffic Signal Change Intervals Based On Driver BehaviorRamadan DurakuNo ratings yet
- CE584 Lecture NotesDocument85 pagesCE584 Lecture NotesMarcos MorrisonNo ratings yet
- Traffic Signal DesignDocument56 pagesTraffic Signal Designeasy joNo ratings yet
- Traffic Signal DesignDocument10 pagesTraffic Signal DesignLalit MalikNo ratings yet
- Traffic Analysis Technique (Traffic Flow Theory)Document15 pagesTraffic Analysis Technique (Traffic Flow Theory)Crystal May Oqueriza100% (1)
- Design Priciples of Traffic SignalDocument23 pagesDesign Priciples of Traffic SignalQUEIZNo ratings yet
- Review Module - Transportation EngineeringDocument2 pagesReview Module - Transportation EngineeringFra angelica s. EspinosaNo ratings yet
- Delay of Signalized IntersectionsDocument15 pagesDelay of Signalized IntersectionsZainab A. AbdulstaarNo ratings yet
- Seismic Refraction For Class 2Document50 pagesSeismic Refraction For Class 2Jayanti TangdiomboNo ratings yet
- Transportation Second ExamDocument107 pagesTransportation Second ExamماقوريNo ratings yet
- Lab 6 Saturation Flow RateDocument4 pagesLab 6 Saturation Flow RateDhrubo Alam100% (4)
- Signal Timing and DesignDocument12 pagesSignal Timing and DesignVirtual RealityNo ratings yet
- Intersection Analysis PDFDocument64 pagesIntersection Analysis PDFAmar Al ChaabanNo ratings yet
- Traffic Signal DesignDocument24 pagesTraffic Signal DesignKocic BalicevacNo ratings yet
- CIVENG 4TA4 Traffic Analysis: Traffic Flow Theory: Key Variables of Uninterrupted TrafficDocument44 pagesCIVENG 4TA4 Traffic Analysis: Traffic Flow Theory: Key Variables of Uninterrupted TraffichaniNo ratings yet
- Special Requirement in Traffic Signal: 57.3.1 Change IntervalDocument6 pagesSpecial Requirement in Traffic Signal: 57.3.1 Change Intervalasxl113No ratings yet
- Unsignalized Intersection TheoryDocument49 pagesUnsignalized Intersection TheoryGaurav VermaNo ratings yet
- UEMX 3813 Highway and Transportation: Lecture 2: Fundamentals of Traffic Flow and Queuing Theory Ir. Dr. Khoo Hooi LingDocument39 pagesUEMX 3813 Highway and Transportation: Lecture 2: Fundamentals of Traffic Flow and Queuing Theory Ir. Dr. Khoo Hooi LingMOBA UNINo ratings yet
- Traffic Intersection Signal Design PDFDocument7 pagesTraffic Intersection Signal Design PDFMukomaNo ratings yet
- Chapt 6-7 FinalizeDocument66 pagesChapt 6-7 FinalizeCarmelo Janiza LavareyNo ratings yet
- Chapter 1 New - B (TRAFFIC ENGINEERING BFC 32302)Document28 pagesChapter 1 New - B (TRAFFIC ENGINEERING BFC 32302)Mahmuddin AminNo ratings yet
- Chapter 7 HighwayDocument54 pagesChapter 7 HighwayArvinnNo ratings yet
- CE683A Assignment 8Document2 pagesCE683A Assignment 8Rajeev MoondNo ratings yet
- Lect2 - Traffic FlowDocument46 pagesLect2 - Traffic FlowDuaa SalehNo ratings yet
- 10-Lecture 09Document27 pages10-Lecture 09joe hassNo ratings yet
- Fundamental Principles of Traffic Flow: Gap and Gap AcceptanceDocument26 pagesFundamental Principles of Traffic Flow: Gap and Gap AcceptanceJonathan Jr TejadaNo ratings yet
- Chap7 Signal Operation TermsDocument20 pagesChap7 Signal Operation TermsHadhi Hassan KhanNo ratings yet
- Traffic Engineering: University of Diyala College of Engineering Civil Engineering DepartmentDocument37 pagesTraffic Engineering: University of Diyala College of Engineering Civil Engineering Departmentsdeeq alaghaNo ratings yet
- Chapter 3Document51 pagesChapter 3kedirNo ratings yet
- Traffic Lights or Roundabout? Analysis Using The Modified Kinematic LWR ModelDocument9 pagesTraffic Lights or Roundabout? Analysis Using The Modified Kinematic LWR ModelMuhammad NuraNo ratings yet
- Chapter 31 - Signalized Intersections Supplemental - 600 - Copia (013-073) PDFDocument61 pagesChapter 31 - Signalized Intersections Supplemental - 600 - Copia (013-073) PDFDeisy Ñontol MuñozNo ratings yet
- Rigorous Definitions of Traffic Stream CharacteristicsDocument21 pagesRigorous Definitions of Traffic Stream CharacteristicsBilly WilliamsNo ratings yet
- Past Board Objective Questions MsteDocument6 pagesPast Board Objective Questions MsteFely Joy Relatores100% (1)
- Thesis - Report - Aman - Pabbi - 4october 15 PDFDocument74 pagesThesis - Report - Aman - Pabbi - 4october 15 PDFSimranjit Singh MarwahNo ratings yet
- CIV4103-Test 1-Solution-11Document4 pagesCIV4103-Test 1-Solution-11Virtual RealityNo ratings yet
- CIVE461A: Transportation Engineering and Lab Unit E: Traffic Analysis at Signalized IntersectionsDocument27 pagesCIVE461A: Transportation Engineering and Lab Unit E: Traffic Analysis at Signalized Intersectionsanthony mikhaelNo ratings yet
- Container Yard Route Planning SystemDocument4 pagesContainer Yard Route Planning Systemeditor_ijarcsseNo ratings yet
- Pretimed ControlDocument7 pagesPretimed ControlBekele MuletaNo ratings yet
- Lab7Document7 pagesLab7Ravindra Pratap Singh BhanawatNo ratings yet
- CVE 06 Highway and Railroad Engg 12 Fundamental Principles of Traffic FlowDocument12 pagesCVE 06 Highway and Railroad Engg 12 Fundamental Principles of Traffic Flowluces.johnlloyd05No ratings yet
- Introductionto Traffic EngineeringDocument56 pagesIntroductionto Traffic Engineeringcristina23No ratings yet
- Mechanics: Problems in Undergraduate PhysicsFrom EverandMechanics: Problems in Undergraduate PhysicsRating: 3.5 out of 5 stars3.5/5 (2)
- Solar SystemDocument27 pagesSolar SystemChem Jayder Masilang CabungcalNo ratings yet
- Railway Junction Simulation and Analysis For Mixed Rail Traffic C17atcssir2Document7 pagesRailway Junction Simulation and Analysis For Mixed Rail Traffic C17atcssir227051995No ratings yet
- Railway Capacity AnalysisDocument77 pagesRailway Capacity Analysis27051995No ratings yet
- Eye Tracker - Tobii-Pro-Glasses-3-Wearable-Eye-TrackerDocument2 pagesEye Tracker - Tobii-Pro-Glasses-3-Wearable-Eye-Tracker27051995No ratings yet
- iRAD User Manual V 2.0 DraftDocument114 pagesiRAD User Manual V 2.0 Draft27051995No ratings yet
- Journey Towards World Class Stations - Assessment of Platform Amenities at Allahabad Junction154479378Document16 pagesJourney Towards World Class Stations - Assessment of Platform Amenities at Allahabad Junction15447937827051995No ratings yet
- Mixed-Traffic Network-Simulation Tool - IIT BombayDocument2 pagesMixed-Traffic Network-Simulation Tool - IIT Bombay27051995No ratings yet
- Taylor Plot PaperDocument17 pagesTaylor Plot Papertathagatha khanNo ratings yet
- Automated Assessment of Inconsistency For Crash Analysis - A Case Study On NH66 NCRI - 2020 - Paper - 100Document11 pagesAutomated Assessment of Inconsistency For Crash Analysis - A Case Study On NH66 NCRI - 2020 - Paper - 10027051995No ratings yet
- Line Capacity SimulatorDocument1 pageLine Capacity Simulator27051995No ratings yet
- 2021 Special Issue On Applied Mathematics For Traffic and Transport SystemsDocument3 pages2021 Special Issue On Applied Mathematics For Traffic and Transport Systems27051995No ratings yet
- 2021 - Simulation Study of Autonomous Vehicles' Effect On Traffic Flow Characteristics Including Autonomous Buses 4318652Document17 pages2021 - Simulation Study of Autonomous Vehicles' Effect On Traffic Flow Characteristics Including Autonomous Buses 431865227051995No ratings yet
- (Ghazwan Al Haji.) Towards A Road Safety DevelopmeDocument113 pages(Ghazwan Al Haji.) Towards A Road Safety DevelopmeRizky AkbarNo ratings yet
- JCRImpactfactorlist Release Year 2020Document272 pagesJCRImpactfactorlist Release Year 202027051995No ratings yet
- Highway Models Sustainability-UpdatedDocument2 pagesHighway Models Sustainability-Updated27051995No ratings yet
- 2021 - Simulation Study of Autonomous Vehicles' Effect On Traffic Flow Characteristics Including Autonomous Buses 4318652Document17 pages2021 - Simulation Study of Autonomous Vehicles' Effect On Traffic Flow Characteristics Including Autonomous Buses 431865227051995No ratings yet
- 2021-IRC Indian Highway - Review of Identification of Accident Black Spot-Sewa Ram-SPA DelhiDocument13 pages2021-IRC Indian Highway - Review of Identification of Accident Black Spot-Sewa Ram-SPA Delhi27051995No ratings yet
- 2021 - Quantification of Surrogate Safety Measure To Predict Severity of Road Crashes at Median Openings-Partha Pratim Dey IIT BhubneshwerDocument7 pages2021 - Quantification of Surrogate Safety Measure To Predict Severity of Road Crashes at Median Openings-Partha Pratim Dey IIT Bhubneshwer27051995No ratings yet
- 2021 - Quantification of Surrogate Safety Measure To Predict Severity of Road Crashes at Median Openings-Partha Pratim Dey IIT BhubneshwerDocument7 pages2021 - Quantification of Surrogate Safety Measure To Predict Severity of Road Crashes at Median Openings-Partha Pratim Dey IIT Bhubneshwer27051995No ratings yet
- 2021-Improving The Performance of A Topological Map Matching Algorithm Through Error Detection and CorrectionDocument13 pages2021-Improving The Performance of A Topological Map Matching Algorithm Through Error Detection and Correction27051995No ratings yet
- 2021 - Investigating Conflict Behaviours and Characteristics in Shared Space For Pedestrians, Conventional Bicycles and E-BikesDocument10 pages2021 - Investigating Conflict Behaviours and Characteristics in Shared Space For Pedestrians, Conventional Bicycles and E-Bikes27051995No ratings yet
- 2021-IRC Indian Highway - Review of Identification of Accident Black Spot-Sewa Ram-SPA DelhiDocument13 pages2021-IRC Indian Highway - Review of Identification of Accident Black Spot-Sewa Ram-SPA Delhi27051995No ratings yet
- 2021-07-2021 - Customizing The Following Behavior Models To Mimic The Weak Lane Based Mixed Traffic ConditionsDocument29 pages2021-07-2021 - Customizing The Following Behavior Models To Mimic The Weak Lane Based Mixed Traffic Conditions27051995No ratings yet
- 2021 - Investigating Conflict Behaviours and Characteristics in Shared Space For Pedestrians, Conventional Bicycles and E-BikesDocument10 pages2021 - Investigating Conflict Behaviours and Characteristics in Shared Space For Pedestrians, Conventional Bicycles and E-Bikes27051995No ratings yet
- 2021-Improving The Performance of A Topological Map Matching Algorithm Through Error Detection and CorrectionDocument13 pages2021-Improving The Performance of A Topological Map Matching Algorithm Through Error Detection and Correction27051995No ratings yet
- 2021 - Quantification of Surrogate Safety Measure To Predict Severity of Road Crashes at Median Openings-Partha Pratim Dey IIT BhubneshwerDocument7 pages2021 - Quantification of Surrogate Safety Measure To Predict Severity of Road Crashes at Median Openings-Partha Pratim Dey IIT Bhubneshwer27051995No ratings yet
- 2021-Delhi Air Quality Prediction Using LSTM Deep Learning Models With A Focus On COVID-19 Lockdown 2102.10551Document18 pages2021-Delhi Air Quality Prediction Using LSTM Deep Learning Models With A Focus On COVID-19 Lockdown 2102.1055127051995No ratings yet
- 2021 Analyzing Driver Behavior Under Naturalistic Driving Conditions - A ReviewDocument21 pages2021 Analyzing Driver Behavior Under Naturalistic Driving Conditions - A Review27051995No ratings yet
- Research ArticleDocument17 pagesResearch Article27051995No ratings yet
- 2021-07-30 A Systematic Review of Traffic Conflict-Based Safety Measures With A Focus On Application ContextDocument100 pages2021-07-30 A Systematic Review of Traffic Conflict-Based Safety Measures With A Focus On Application Context27051995No ratings yet
- HONDA SH125 - SH150 21YM Owners ManualDocument164 pagesHONDA SH125 - SH150 21YM Owners Manualmitros_karamitrosNo ratings yet
- Chandni Chowk Redevelopment Plan: Red Fort To Fatehpuri Masjid Road StretchDocument21 pagesChandni Chowk Redevelopment Plan: Red Fort To Fatehpuri Masjid Road StretchSania MehraNo ratings yet
- Linear Equation Word ProblemDocument14 pagesLinear Equation Word ProblemHao LuNo ratings yet
- Passat 2016 PricessDocument22 pagesPassat 2016 PricessNicu MuțNo ratings yet
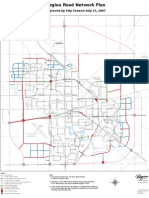
- Regina Road Network Plan MapDocument1 pageRegina Road Network Plan MapKunnar TrelNo ratings yet
- 4000 Essential English Words 6 Unit 29: The ShortcutDocument7 pages4000 Essential English Words 6 Unit 29: The ShortcutAdriana NarolskaNo ratings yet
- Desert Magazine 1949 MarchDocument48 pagesDesert Magazine 1949 Marchdm1937100% (1)
- De ProjectsDocument20 pagesDe ProjectsRaviraj Dodiya0% (1)
- Learner Kit Guide For Supervising Drivers EnglishDocument36 pagesLearner Kit Guide For Supervising Drivers EnglishThatBlueWolfieNo ratings yet
- Method StatementDocument3 pagesMethod StatementTaj ahmadNo ratings yet
- Trailler On JettyDocument4 pagesTrailler On JettyFuad Andaru BaskaraNo ratings yet
- Tort LiabilityDocument14 pagesTort LiabilityTADHLKNo ratings yet
- 13 Foth ZFDocument29 pages13 Foth ZFDaniel Alex SánchezNo ratings yet
- ! - Pay No Fine - A User Guide To Successfully Fighting Traffic TicketsDocument93 pages! - Pay No Fine - A User Guide To Successfully Fighting Traffic Ticketsdude0213557% (7)
- Incredible Fact About NCRDocument5 pagesIncredible Fact About NCRReynaldo BorlazaNo ratings yet
- Ten Ford Mustang History MakersDocument4 pagesTen Ford Mustang History MakersmontytalocoNo ratings yet
- Danpilot Stigsnaes Ensted Plus15mDocument24 pagesDanpilot Stigsnaes Ensted Plus15mokandandinNo ratings yet
- PDFDocument6 pagesPDFyagnasreeNo ratings yet
- Moving Walkway: Study Guide For Module No.Document5 pagesMoving Walkway: Study Guide For Module No.virgilioNo ratings yet
- Beotruck 2012 Spisak IzlagacaDocument4 pagesBeotruck 2012 Spisak IzlagacaSlVNo ratings yet
- 1 Nhai Site Engg. TenderDocument3 pages1 Nhai Site Engg. TenderAjay VermaNo ratings yet
- Soil Compactors CatDocument34 pagesSoil Compactors CatFALCKOR50% (2)
- Schwalbe 2024Document108 pagesSchwalbe 2024Tramvaj SlavkoNo ratings yet
- Prepositions (In, On, At, To)Document7 pagesPrepositions (In, On, At, To)Abigail RuedaNo ratings yet
- 03-15-18 EditionDocument28 pages03-15-18 EditionSan Mateo Daily JournalNo ratings yet
- Banala Pochaiah TRDocument8 pagesBanala Pochaiah TRPonnapati ThomasreddyNo ratings yet
- North Ave 02 2022 Over Oak Leaf TrailDocument1 pageNorth Ave 02 2022 Over Oak Leaf TrailTMJ4 NewsNo ratings yet
- Urban Goods Movement Modelling For India CitiesDocument63 pagesUrban Goods Movement Modelling For India CitiesJayita ChakrabortyNo ratings yet
- Bridge Girders Technical Guide: Regional Specifications / Ab / MB / SKDocument24 pagesBridge Girders Technical Guide: Regional Specifications / Ab / MB / SKFercho MariscalNo ratings yet
- He Va Vip Roller 54 63 Spare PartsDocument16 pagesHe Va Vip Roller 54 63 Spare PartstotcsabNo ratings yet