You might also like
- Blender Scripting With Python (Sample)Document24 pagesBlender Scripting With Python (Sample)john0% (1)
- FEA Analysis of Security Fence ElementsDocument98 pagesFEA Analysis of Security Fence ElementsGerardo JoseNo ratings yet
- ISARC 2020 Paper 143Document9 pagesISARC 2020 Paper 143ADI LINA MUSTAFFANo ratings yet
- IOT, Forensics, BlockchainDocument53 pagesIOT, Forensics, BlockchainRaymon PrakashNo ratings yet
- Monitoring-workers-on-indoor-construction-sites-using-data-_2024_Automation-Document21 pagesMonitoring-workers-on-indoor-construction-sites-using-data-_2024_Automation-talha jaffarNo ratings yet
- Alizadehsalehi 2018Document16 pagesAlizadehsalehi 2018Gurleen KaurNo ratings yet
- Assessing Research Issues in Automated Project Performance Control (APPC)Document11 pagesAssessing Research Issues in Automated Project Performance Control (APPC)Naeem YounisNo ratings yet
- A-machine-learning-approach-to-predict-production-time-u_2022_Advanced-EnginDocument12 pagesA-machine-learning-approach-to-predict-production-time-u_2022_Advanced-EnginJavi HaroNo ratings yet
- 2019 - Real-Time Resource Tracking For Analyzing Value-Adding Time in Construction-Jianyu Zhao Et Al.Document14 pages2019 - Real-Time Resource Tracking For Analyzing Value-Adding Time in Construction-Jianyu Zhao Et Al.Augusto VniciusNo ratings yet
- 4- 2018 - VIP - Towards an Automated Photogrammetry-based Approach for Monitoring and Controlling Construction Site ActivitiesDocument11 pages4- 2018 - VIP - Towards an Automated Photogrammetry-based Approach for Monitoring and Controlling Construction Site ActivitiesA FaroukNo ratings yet
- A Formalism For Utilization of Sensor Systems and Integrated Project Models For Active Construction Quality ControlDocument25 pagesA Formalism For Utilization of Sensor Systems and Integrated Project Models For Active Construction Quality ControlchimarlinaNo ratings yet
- Progress MonitoringDocument7 pagesProgress MonitoringGihanEdiriNo ratings yet
- Integrating Design and Construction Through Virtual PrototypingDocument19 pagesIntegrating Design and Construction Through Virtual Prototypingraku2121No ratings yet
- Gong 2011 Automation in ConstructionDocument16 pagesGong 2011 Automation in ConstructionGeorge NunesNo ratings yet
- Enhanced Automated Quantity Take-Off in Building Information ModelingDocument43 pagesEnhanced Automated Quantity Take-Off in Building Information ModelingKhusnul KhotimahNo ratings yet
- Bim Assisted Labor Productivity Measurement Method For Structural FormworkDocument12 pagesBim Assisted Labor Productivity Measurement Method For Structural FormworkBirukNo ratings yet
- 2015 Yang - Construction Performance MonitoringDocument14 pages2015 Yang - Construction Performance MonitoringWilson EvaristoNo ratings yet
- Automated Progress Monitoring Technological Model F 2023 Ain Shams EngineeriDocument12 pagesAutomated Progress Monitoring Technological Model F 2023 Ain Shams EngineeriJean-Roger TchapoNo ratings yet
- Buildings 12 02167Document12 pagesBuildings 12 02167aliasadi199888No ratings yet
- A Defect Management System For Reinforced Concrete Work Utilizing BIMDocument8 pagesA Defect Management System For Reinforced Concrete Work Utilizing BIMsalmadlouhNo ratings yet
- Scaffolding RateDocument14 pagesScaffolding RateM.s SoloNo ratings yet
- Convr 2013 22Document10 pagesConvr 2013 22orengematagaroNo ratings yet
- Mobile Construction SCM Using PDA and BarcodesDocument23 pagesMobile Construction SCM Using PDA and BarcodesMustika Wulan PangestuNo ratings yet
- Lee 2020 IOP Conf. Ser. Mater. Sci. Eng. 943 012058Document8 pagesLee 2020 IOP Conf. Ser. Mater. Sci. Eng. 943 012058Name UserNo ratings yet
- Research Article: An Integrated BIM System To Track The Time and Cost of Construction Projects: A Case StudyDocument11 pagesResearch Article: An Integrated BIM System To Track The Time and Cost of Construction Projects: A Case Studynavpreet singhNo ratings yet
- Kropp - 4D Dim Construction State RecognitionDocument22 pagesKropp - 4D Dim Construction State Recognitionsamir.amanNo ratings yet
- cua cua 3Document11 pagescua cua 3Manuel YanarcNo ratings yet
- BIM and QR-codes Interaction On A Construction SitDocument9 pagesBIM and QR-codes Interaction On A Construction SitAshok AmmaiyappanNo ratings yet
- Alamudin AssignimentDocument6 pagesAlamudin Assignimentermias asalifNo ratings yet
- Automated Code Compliance Checking Based On A Visual Language and BIMDocument8 pagesAutomated Code Compliance Checking Based On A Visual Language and BIMKavish BhagwatNo ratings yet
- Sustainability 09 00426 v2Document23 pagesSustainability 09 00426 v2rahul.srivastavaNo ratings yet
- 018kuehne PDFDocument8 pages018kuehne PDFnguyenthanhdt5No ratings yet
- Construction Payment Automation Using BlockchainDocument30 pagesConstruction Payment Automation Using BlockchainJuan BrugadaNo ratings yet
- Construction Monitoring and Reporting Using Drones and Unmanned Aerial Vehicles (Uavs)Document9 pagesConstruction Monitoring and Reporting Using Drones and Unmanned Aerial Vehicles (Uavs)Enx JadapNo ratings yet
- Seminar Presentation DaisyDocument21 pagesSeminar Presentation Daisyakshaymendez1996No ratings yet
- Advanced Work PackagesDocument24 pagesAdvanced Work Packagescfsolis100% (1)
- 6 Sec 075 Vilutiene AutomatedDocument8 pages6 Sec 075 Vilutiene AutomatedRamesh JoshiNo ratings yet
- Cheng 2002 Automation-in-ConstructionDocument11 pagesCheng 2002 Automation-in-ConstructionTheGimhan123No ratings yet
- Sustainability 09 00426 PDFDocument21 pagesSustainability 09 00426 PDFChuan Sin PanNo ratings yet
- Laing O'Rourke Case Study Final LRDocument3 pagesLaing O'Rourke Case Study Final LRTharach JanesuapasaereeNo ratings yet
- Construction Quality Management Based On A Collaborative System Using BIMDocument11 pagesConstruction Quality Management Based On A Collaborative System Using BIMDavid VelasquezNo ratings yet
- SCI - Volume 29 - Issue 3 - Pages 1024-1037Document14 pagesSCI - Volume 29 - Issue 3 - Pages 1024-1037Magno RegisNo ratings yet
- Buildings 12 01381 v2Document21 pagesBuildings 12 01381 v2Victor DelegregoNo ratings yet
- 1 s2.0 S0926580521004106 Main - CompressedDocument21 pages1 s2.0 S0926580521004106 Main - CompressedEdgar Enrique Vilca RomeroNo ratings yet
- DT 1Document8 pagesDT 1Mohamed Abdel-Aal MohamedNo ratings yet
- 473-Article Text-746-1-10-20220819Document12 pages473-Article Text-746-1-10-20220819MC88 ConstructionNo ratings yet
- CPM, Pert, Bar ChartsDocument32 pagesCPM, Pert, Bar ChartsAr Manish SrivastavNo ratings yet
- Project Construction Methodology - Best Editable Construction QHSE Documentation PortalDocument25 pagesProject Construction Methodology - Best Editable Construction QHSE Documentation PortalSaeed ALYOUSEFINo ratings yet
- Automated Progress Tracking of ErectionDocument11 pagesAutomated Progress Tracking of ErectionPHILBIN M PHILIP M.Tech SECM 2019-2021No ratings yet
- Computer Vision-Bases Construction Progress MonitoringDocument17 pagesComputer Vision-Bases Construction Progress MonitoringFabricio Rosado UrquhartNo ratings yet
- Applying Critical Path Method to Dredging OperationsDocument16 pagesApplying Critical Path Method to Dredging Operationsabidah fitraNo ratings yet
- BIM Applications of Rule-Based Checking in ConstruDocument9 pagesBIM Applications of Rule-Based Checking in ConstrumounirNo ratings yet
- Generating Construction Schedules Through Automatic Data Extraction Using Open BIM (Building Information Modeling) TechnologyDocument11 pagesGenerating Construction Schedules Through Automatic Data Extraction Using Open BIM (Building Information Modeling) TechnologyCPittmanNo ratings yet
- Cad 20 (S3) 2023 72-83Document12 pagesCad 20 (S3) 2023 72-83vipinNo ratings yet
- Current Trends in Construction Site Layout PlanningDocument10 pagesCurrent Trends in Construction Site Layout PlanningSoveasna ChanNo ratings yet
- Schedule and Cost Control in Dwelling Construction Using Control ChartsDocument17 pagesSchedule and Cost Control in Dwelling Construction Using Control ChartsElvisNo ratings yet
- Automatic Estimation of Excavator Actual and Relative Cycle TimesDocument16 pagesAutomatic Estimation of Excavator Actual and Relative Cycle TimesisprengelNo ratings yet
- Automated Control of Construction Project PerformanceDocument4 pagesAutomated Control of Construction Project PerformancenuwanthaNo ratings yet
- Spe 204607 MsDocument16 pagesSpe 204607 MsChris LimNo ratings yet
- [9] Sanhudo, L., Calvetti, D., Martins, J. P., Ramos, N., Mêda, P., Gonçalves, M. C., & Sousa, H. (2021). Activity Classification Using Accelerometers and Machine Learning for Complex Construction Worker Activities. JournalDocument16 pages[9] Sanhudo, L., Calvetti, D., Martins, J. P., Ramos, N., Mêda, P., Gonçalves, M. C., & Sousa, H. (2021). Activity Classification Using Accelerometers and Machine Learning for Complex Construction Worker Activities. JournalThanh HùngNo ratings yet
- Dr. Adel El Shabrawy & Dr. Tarek Sakr: PRMG 10:planning & ControlDocument49 pagesDr. Adel El Shabrawy & Dr. Tarek Sakr: PRMG 10:planning & ControlMohamed SamirNo ratings yet
- Construction Supervision Qc + Hse Management in Practice: Quality Control, Ohs, and Environmental Performance Reference GuideFrom EverandConstruction Supervision Qc + Hse Management in Practice: Quality Control, Ohs, and Environmental Performance Reference GuideRating: 5 out of 5 stars5/5 (2)
- HU03 LEEDv4OMDocument9 pagesHU03 LEEDv4OMأحمد خيرالدين عليNo ratings yet
- Event AlumniDocument2 pagesEvent Alumniأحمد خيرالدين عليNo ratings yet
- Request For A Bid On Classes - CDC University of DohukDocument8 pagesRequest For A Bid On Classes - CDC University of Dohukأحمد خيرالدين عليNo ratings yet
- Green Technologies in Architecture: University of Duhok Architectural Department Stage: 4th Advance Building TechnologyDocument21 pagesGreen Technologies in Architecture: University of Duhok Architectural Department Stage: 4th Advance Building Technologyأحمد خيرالدين عليNo ratings yet
- BIM Management Course: The Integration of BIM in Construction Organizations & It's Impacts On ProductivityDocument30 pagesBIM Management Course: The Integration of BIM in Construction Organizations & It's Impacts On Productivityأحمد خيرالدين عليNo ratings yet
- Fire Sprinkler Systems: University of Duhok Architectural Department Stage: 4th Advance Building TechnologyDocument47 pagesFire Sprinkler Systems: University of Duhok Architectural Department Stage: 4th Advance Building Technologyأحمد خيرالدين عليNo ratings yet
- Precast Concrete Construction TechniquesDocument14 pagesPrecast Concrete Construction Techniquesأحمد خيرالدين عليNo ratings yet
- New Trends in Building Information TechnologyDocument30 pagesNew Trends in Building Information Technologyأحمد خيرالدين عليNo ratings yet
- Accommodation, Toilet, Shower: Container ElevationDocument1 pageAccommodation, Toilet, Shower: Container Elevationأحمد خيرالدين عليNo ratings yet
- Innovative Materials: University of Duhok Architectural Department Stage: 4th Advance Building TechnologyDocument26 pagesInnovative Materials: University of Duhok Architectural Department Stage: 4th Advance Building Technologyأحمد خيرالدين علي100% (1)
- Dynamic Architecture: University of Duhok Architectural Department Stage: 4th Advance Building TechnologyDocument28 pagesDynamic Architecture: University of Duhok Architectural Department Stage: 4th Advance Building Technologyأحمد خيرالدين عليNo ratings yet
- Tender Invitation SaplingDocument1 pageTender Invitation Saplingأحمد خيرالدين عليNo ratings yet
- BOQ - Out of Contract - WOR-1903Document1 pageBOQ - Out of Contract - WOR-1903أحمد خيرالدين عليNo ratings yet
- Dynamic Facades Adjust Building Skins for Optimal EnvironmentsDocument24 pagesDynamic Facades Adjust Building Skins for Optimal Environmentsأحمد خيرالدين عليNo ratings yet
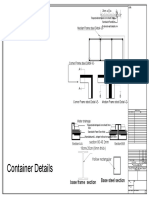
- Container DetailsDocument1 pageContainer Detailsأحمد خيرالدين عليNo ratings yet
- SOW Prepare P-4 Site For P-6A SidetrackDocument2 pagesSOW Prepare P-4 Site For P-6A Sidetrackأحمد خيرالدين عليNo ratings yet
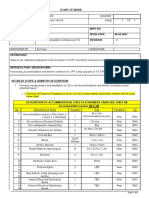
- OPF Accommodation Container Scope of WorkDocument5 pagesOPF Accommodation Container Scope of Workأحمد خيرالدين عليNo ratings yet
- Attachment B1 Project Manager Ahmed KhairadeenDocument5 pagesAttachment B1 Project Manager Ahmed Khairadeenأحمد خيرالدين عليNo ratings yet
- CV for Architectural Engineer with Extensive WASH ExperienceDocument3 pagesCV for Architectural Engineer with Extensive WASH Experienceأحمد خيرالدين عليNo ratings yet
- Attachment B5 AbdulhakeemDocument1 pageAttachment B5 Abdulhakeemأحمد خيرالدين عليNo ratings yet
- HKN MSC - V.24 (Non Well)Document77 pagesHKN MSC - V.24 (Non Well)أحمد خيرالدين عليNo ratings yet
- RFQ A - AL-HAMDANIYA AND BASHIQA - Fruit Saplings RFQ (Funded by WFP)Document4 pagesRFQ A - AL-HAMDANIYA AND BASHIQA - Fruit Saplings RFQ (Funded by WFP)أحمد خيرالدين عليNo ratings yet
- Attachment B2 Site Engineer ASAAD KADHIM 27-3-2021Document8 pagesAttachment B2 Site Engineer ASAAD KADHIM 27-3-2021أحمد خيرالدين عليNo ratings yet
- 0-BOQ - Prepare P-4 Site For P-6A SidetrackDocument1 page0-BOQ - Prepare P-4 Site For P-6A Sidetrackأحمد خيرالدين عليNo ratings yet
- RFQ B - SINJAR - Fruit Saplings RFQ (Funded by Samaritan's Purse)Document3 pagesRFQ B - SINJAR - Fruit Saplings RFQ (Funded by Samaritan's Purse)أحمد خيرالدين عليNo ratings yet
- HKN MSC - V.24 (Non Well)Document77 pagesHKN MSC - V.24 (Non Well)أحمد خيرالدين عليNo ratings yet
- HKN MSC - v.24 (Non Well)Document78 pagesHKN MSC - v.24 (Non Well)أحمد خيرالدين عليNo ratings yet
- CPC Company's Anti-Corruption and Bribery PolicyDocument14 pagesCPC Company's Anti-Corruption and Bribery Policyأحمد خيرالدين عليNo ratings yet
- Cognitivism - Group 3Document12 pagesCognitivism - Group 3أحمد خيرالدين عليNo ratings yet
- CPC Company's Anti-Corruption and Bribery PolicyDocument14 pagesCPC Company's Anti-Corruption and Bribery Policyأحمد خيرالدين عليNo ratings yet
- Automated MeshingDocument8 pagesAutomated MeshinghachanNo ratings yet
- Nurbs and Boolean Modelling TechniquesDocument8 pagesNurbs and Boolean Modelling TechniquesOzPaper HelpNo ratings yet
- CFD Airfoil Flow SimulationDocument22 pagesCFD Airfoil Flow SimulationRahis Pal SinghNo ratings yet
- The Blender Bros Game Asset Cheat SheetDocument2 pagesThe Blender Bros Game Asset Cheat SheetTommaso De VitoNo ratings yet
- Mechanical Intro 16.0 L04 MeshingDocument57 pagesMechanical Intro 16.0 L04 MeshingAndrey ZagorulkoNo ratings yet
- ReadmeDocument34 pagesReadmekorttrrNo ratings yet
- MOM Antenna Simulations with Matlab: RWG Basis FunctionsDocument8 pagesMOM Antenna Simulations with Matlab: RWG Basis FunctionsjoserobertosolanoNo ratings yet
- What Is New V.3.7: Designing With FormfinderDocument26 pagesWhat Is New V.3.7: Designing With FormfinderPierre BadiaNo ratings yet
- Study Flashcards To Pass CSWPDocument181 pagesStudy Flashcards To Pass CSWPsafowanNo ratings yet
- Class Handout MFG500024 ClassHandout-MFG500024-Gillman-AU2021Document19 pagesClass Handout MFG500024 ClassHandout-MFG500024-Gillman-AU2021Miguel FerreiraNo ratings yet
- ABAQUS Tutorial - Contact AnalysisDocument17 pagesABAQUS Tutorial - Contact AnalysisSudipta BhowmickNo ratings yet
- The Blender Quick Start Guide: by Darrin LileDocument23 pagesThe Blender Quick Start Guide: by Darrin LileMiguel Alberto Dávila SacotoNo ratings yet
- ANSYS Mosaic Poly Hexcore Mesh For High Lift Aircraft Configuration - AeSI 21st CFD Sym Aug 2019Document12 pagesANSYS Mosaic Poly Hexcore Mesh For High Lift Aircraft Configuration - AeSI 21st CFD Sym Aug 2019GregorSmithNo ratings yet
- Meshing 2Document26 pagesMeshing 2sb aliNo ratings yet
- An Arbitrary Lagrangian-Eulerian Computing Method For All Flow SpeedsDocument27 pagesAn Arbitrary Lagrangian-Eulerian Computing Method For All Flow SpeedsDiyanosh HedayatiNo ratings yet
- How To Guide - Producing Nursery Rhyme Animations in 3DS MaxDocument9 pagesHow To Guide - Producing Nursery Rhyme Animations in 3DS Maxapi-311443861No ratings yet
- MayaBonusTools 2023Document80 pagesMayaBonusTools 2023Miron MNo ratings yet
- Garment Modeling From A Single Image: WOQS05 TZW 07 XFT 08Document7 pagesGarment Modeling From A Single Image: WOQS05 TZW 07 XFT 08jkashNo ratings yet
- Fem MeshingDocument80 pagesFem MeshingBolarinwa100% (1)
- Calculix User'S Manual - Calculix Graphix, Version 2.11 - : Klaus Wittig August 1, 2016Document146 pagesCalculix User'S Manual - Calculix Graphix, Version 2.11 - : Klaus Wittig August 1, 2016nsk143446No ratings yet
- Siggraph2019 HydraDocument114 pagesSiggraph2019 Hydra王璨No ratings yet
- Collection Abaqus PDFDocument176 pagesCollection Abaqus PDFDeghboudj Samir100% (3)
- Graph TerminologyDocument4 pagesGraph TerminologyMuhammad ZainNo ratings yet
- Honeycomb Networks Topological Properties and Communication AlgorithmsDocument7 pagesHoneycomb Networks Topological Properties and Communication AlgorithmsSurabhi ChandaNo ratings yet
- Patran Tutorial 5Document9 pagesPatran Tutorial 5yousefNo ratings yet
- AA V4 I1 Mesh Morphing Accelerates Design Optimization PDFDocument2 pagesAA V4 I1 Mesh Morphing Accelerates Design Optimization PDFRapacitorNo ratings yet
- GEOMETRIC MODELING: A 40-CHARACTER TITLEDocument29 pagesGEOMETRIC MODELING: A 40-CHARACTER TITLEHemasundar Reddy JolluNo ratings yet
- XFlow 2015 Tutorial GuideDocument222 pagesXFlow 2015 Tutorial Guideking king100% (1)



























































![[9] Sanhudo, L., Calvetti, D., Martins, J. P., Ramos, N., Mêda, P., Gonçalves, M. C., & Sousa, H. (2021). Activity Classification Using Accelerometers and Machine Learning for Complex Construction Worker Activities. Journal](https://imgv2-1-f.scribdassets.com/img/document/723642251/149x198/591045c2c0/1713285601?v=1)