You might also like
- 716 Output ModuleDocument2 pages716 Output ModuleTyler HiggsNo ratings yet
- Mpa 4150Document149 pagesMpa 4150GrahamNo ratings yet
- 74LS393 PDFDocument7 pages74LS393 PDFJhonnySanchezNo ratings yet
- DM74LS393Document6 pagesDM74LS393LENOV SOHANNo ratings yet
- DatasheetDocument6 pagesDatasheetStuxnetNo ratings yet
- I01 ElectricDiagram EDocument5 pagesI01 ElectricDiagram EremoturkNo ratings yet
- FSDH0165: Fairchild Power Switch (FPS)Document8 pagesFSDH0165: Fairchild Power Switch (FPS)vetchboyNo ratings yet
- FFB 2907 - FairchildDocument13 pagesFFB 2907 - FairchildStevenNo ratings yet
- Boiler Pressure PartsDocument67 pagesBoiler Pressure PartsAmul PontingNo ratings yet
- FSDH565: Fairchild Power Switch (FPS)Document8 pagesFSDH565: Fairchild Power Switch (FPS)vetchboyNo ratings yet
- Laboratory Exercise 4: CountersDocument2 pagesLaboratory Exercise 4: CountersAbderrazzak RialiNo ratings yet
- DM7442A BCD To Decimal Decoder: General Description FeaturesDocument4 pagesDM7442A BCD To Decimal Decoder: General Description FeaturesPedroNo ratings yet
- AS1340 Datasheet v1 20Document17 pagesAS1340 Datasheet v1 20nareshNo ratings yet
- Boiler Pressure PartsDocument67 pagesBoiler Pressure PartsMITHUN100% (1)
- Wiring Diagram Panel Over FlowDocument13 pagesWiring Diagram Panel Over FlowAchmad FauziNo ratings yet
- TRAINING MSI MS-5 (2)Document23 pagesTRAINING MSI MS-5 (2)adaofisicoNo ratings yet
- A6MF1/2 and A6LF1/2 Rebuild Webinar HighlightsDocument32 pagesA6MF1/2 and A6LF1/2 Rebuild Webinar HighlightsDavid Lacunes63% (8)
- REPORTDocument15 pagesREPORTBhavana K sNo ratings yet
- Steam and Water Flow Circuit: Apl Mundra Power Plant 5×660Mw ProjectDocument2 pagesSteam and Water Flow Circuit: Apl Mundra Power Plant 5×660Mw ProjectParveen NakwalNo ratings yet
- Jameco Part Number 871463: Distributed byDocument13 pagesJameco Part Number 871463: Distributed byBrahimiNo ratings yet
- Driver Instructions: Video Instruction AvailableDocument28 pagesDriver Instructions: Video Instruction Availableroostercockburn100% (1)
- Manual de Usuario Lanzar VIBE 416 (9 Páginas) 2Document1 pageManual de Usuario Lanzar VIBE 416 (9 Páginas) 2victorNo ratings yet
- LineDocument1 pageLineRohit SahNo ratings yet
- Single-Channel: 6N137, Hcpl-2601, Hcpl-2611 Dual-Channel: Hcpl-2630, Hcpl-2631 High Speed-10 Mbit/S Logic Gate OptocouplersDocument12 pagesSingle-Channel: 6N137, Hcpl-2601, Hcpl-2611 Dual-Channel: Hcpl-2630, Hcpl-2631 High Speed-10 Mbit/S Logic Gate Optocouplersgem1144aaNo ratings yet
- 3-11611. 3-117. Two-Wye: Three Phase Motors Illustrations-Chapter 3Document1 page3-11611. 3-117. Two-Wye: Three Phase Motors Illustrations-Chapter 3Jayson Jonson AraojoNo ratings yet
- 9601/DM9601 Retriggerable One Shot: General Description FeaturesDocument6 pages9601/DM9601 Retriggerable One Shot: General Description FeaturesMiguel Angel Pinto SanhuezaNo ratings yet
- DM7445 BCD To Decimal Decoders/Drivers: General Description FeaturesDocument4 pagesDM7445 BCD To Decimal Decoders/Drivers: General Description FeaturesSyaiful RahmanNo ratings yet
- HI2001Document2 pagesHI2001JOSE SALAZARNo ratings yet
- MM74HC4538 Dual Retriggerable Monostable Multivibrator: General DescriptionDocument10 pagesMM74HC4538 Dual Retriggerable Monostable Multivibrator: General DescriptionAlex WongNo ratings yet
- NationalSemiconductorDocument2 pagesNationalSemiconductorkowalmat2002No ratings yet
- Fuller Rtlo 18918bDocument2 pagesFuller Rtlo 18918bAnthony GarzaNo ratings yet
- Fuller 18-Speed Transmissions PDFDocument2 pagesFuller 18-Speed Transmissions PDFWILMAR ANDRES MONTOYA MAYANo ratings yet
- Instructions 100214-1Document2 pagesInstructions 100214-1everith ariasNo ratings yet
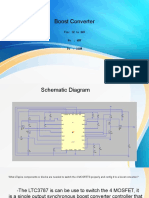
- Boost Converter: Vin: 12 To 24V Vo: 48V Po: 100WDocument4 pagesBoost Converter: Vin: 12 To 24V Vo: 48V Po: 100WNeslynNo ratings yet
- TX6CRX6C New PDFDocument9 pagesTX6CRX6C New PDFbilalNo ratings yet
- L8-Binary ConceptDocument4 pagesL8-Binary ConceptSantosh konduskarNo ratings yet
- 74LS45Document4 pages74LS45jaja558No ratings yet
- Leslie 2101 Service ManualDocument22 pagesLeslie 2101 Service ManualrichiesilvesterNo ratings yet
- 3 To 8 Line Decoder (Inverting) : Order CodesDocument10 pages3 To 8 Line Decoder (Inverting) : Order CodesMahmoud SakkalNo ratings yet
- Piping and Wiring Diagram for Automatic Water Supply UnitDocument2 pagesPiping and Wiring Diagram for Automatic Water Supply UnitNabilaNo ratings yet
- Steam Turbine Governing System 210mwDocument74 pagesSteam Turbine Governing System 210mwRajani Kanta MundaNo ratings yet
- Immersionrc Uno5800 V4 5.8Ghz Audio/Video Receiver: Instruction Manual - International EditionDocument10 pagesImmersionrc Uno5800 V4 5.8Ghz Audio/Video Receiver: Instruction Manual - International EditionAl MunzirNo ratings yet
- Bottle Filling System (Vpat-04sie)Document8 pagesBottle Filling System (Vpat-04sie)tennisfan123No ratings yet
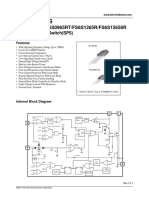
- Fs6S-Series: FS6S0965R/FS6S0965RT/FS6S1265R/FS6S15658RDocument16 pagesFs6S-Series: FS6S0965R/FS6S0965RT/FS6S1265R/FS6S15658RSantz TechNo ratings yet
- Remote Footswitch Board Wiring and Parts PlacementDocument5 pagesRemote Footswitch Board Wiring and Parts PlacementEmmanuel SanzNo ratings yet
- 9 4 PDFDocument3 pages9 4 PDFDavidNo ratings yet
- HEF4043B: 1. General DescriptionDocument13 pagesHEF4043B: 1. General DescriptionpaulpuscasuNo ratings yet
- S Feature D Escriptio: LTC1157 3.3V Dual Micropower High-Side/Low-Side MOSFET DriverDocument8 pagesS Feature D Escriptio: LTC1157 3.3V Dual Micropower High-Side/Low-Side MOSFET DriverPablo LloveraNo ratings yet
- Features: High Performance Pin DriverDocument11 pagesFeatures: High Performance Pin DriverЕвгений ИвановNo ratings yet
- 74HC4051 STMicroelectronicsDocument17 pages74HC4051 STMicroelectronicsLeonel AntonioNo ratings yet
- M54HC42 M74HC42: BCD To Decimal DecoderDocument10 pagesM54HC42 M74HC42: BCD To Decimal DecodernooorNo ratings yet
- Po54G04A, Po74G04A: 54, 74 Series Noise Cancellation GHZ LogicDocument6 pagesPo54G04A, Po74G04A: 54, 74 Series Noise Cancellation GHZ LogicBigdogguruNo ratings yet
- Hbridge Reference Ualberta ArvpDocument24 pagesHbridge Reference Ualberta ArvpAlfiono RahmadiyantoNo ratings yet
- Data Sheet: HEF40244B BuffersDocument6 pagesData Sheet: HEF40244B BuffersDaniel Norberto DemariaNo ratings yet
- Data Sheet: HEF40244B BuffersDocument6 pagesData Sheet: HEF40244B BuffersvanmarteNo ratings yet
- Caja Super 13 Con Top 2Document30 pagesCaja Super 13 Con Top 2WalterNo ratings yet
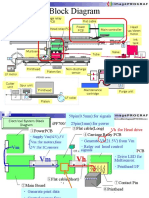
- Block Diagram:: Ece1614 Wireless Vehicle ChargingDocument3 pagesBlock Diagram:: Ece1614 Wireless Vehicle ChargingAnonymous qh5UUGTNo ratings yet
- HEF4051B: 1. General DescriptionDocument23 pagesHEF4051B: 1. General DescriptionNguyễn TrungNo ratings yet
- Unipolar 2-Phase Stepping Motor Driver Ics: Sla7080M SeriesDocument20 pagesUnipolar 2-Phase Stepping Motor Driver Ics: Sla7080M SeriesFreddy MartinezNo ratings yet
- Planos Router CNCDocument53 pagesPlanos Router CNCMiguel JaquetNo ratings yet
- Script Freebitcoin - Bitpick %Document4 pagesScript Freebitcoin - Bitpick %Freddy MartinezNo ratings yet
- Cdd113132 Parker Avr7910s A2 SCHDocument6 pagesCdd113132 Parker Avr7910s A2 SCHFreddy MartinezNo ratings yet
- Unipolar 2-Phase Stepping Motor Driver Ics: Sla7080M SeriesDocument20 pagesUnipolar 2-Phase Stepping Motor Driver Ics: Sla7080M SeriesFreddy MartinezNo ratings yet
- Idoc - Pub Freebitcoin Next Roll PredicttxtDocument1 pageIdoc - Pub Freebitcoin Next Roll PredicttxtFreddy MartinezNo ratings yet
- STK6855Document8 pagesSTK6855Freddy MartinezNo ratings yet
- Script Freebitcoin - Bitpick %Document4 pagesScript Freebitcoin - Bitpick %Freddy MartinezNo ratings yet
- STK6855Document8 pagesSTK6855Freddy MartinezNo ratings yet
- Magnetron LG 2M214Document6 pagesMagnetron LG 2M214Srce AsNo ratings yet
- CBIP Guidelines On Protection: Auto-ReclosingDocument7 pagesCBIP Guidelines On Protection: Auto-Reclosingss_chinniNo ratings yet
- 2502 A 002Document10 pages2502 A 002Mohamed ElmakkyNo ratings yet
- Combinada Convencional 8000 Serie 8040 Equipamento Electrico para Ford, Alfa Romeo, Fiat y Mercedes BenzDocument5 pagesCombinada Convencional 8000 Serie 8040 Equipamento Electrico para Ford, Alfa Romeo, Fiat y Mercedes BenzRamón ManglesNo ratings yet
- Automotive Power SystemsDocument315 pagesAutomotive Power SystemsM. T.No ratings yet
- Daily Lesson Plan Semi DetailedDocument5 pagesDaily Lesson Plan Semi DetailedMark Dexter MejiaNo ratings yet
- 4274GV50 5v Regulator PDFDocument13 pages4274GV50 5v Regulator PDFvanadium0No ratings yet
- Controlador Siemens Lae10 LfeDocument13 pagesControlador Siemens Lae10 LfeJosé Ginés Abellan GarciaNo ratings yet
- If SCDocument2 pagesIf SCvergin12345No ratings yet
- Precision Single, Dual and Quad Low Noise Operational Amplifiers PDFDocument32 pagesPrecision Single, Dual and Quad Low Noise Operational Amplifiers PDFPaul DumitruNo ratings yet
- Windows Uefi Firmware Update PlatformDocument46 pagesWindows Uefi Firmware Update PlatformPantea Constantin AlinNo ratings yet
- KOD: JA 505 Kursus: Automotive Electronics Program: DAD5-S2Document32 pagesKOD: JA 505 Kursus: Automotive Electronics Program: DAD5-S2Muhammad Zainul Abidin100% (1)
- 38Ah VRLA Battery SpecsDocument2 pages38Ah VRLA Battery Specseddywidjaya9No ratings yet
- Circuit Analysis and Power CalculationDocument13 pagesCircuit Analysis and Power CalculationThiv TriNo ratings yet
- How To Wire Up A Power Amplifier - UpdatedDocument10 pagesHow To Wire Up A Power Amplifier - UpdatedAlessandro CardelliNo ratings yet
- Abb Artu 2014Document404 pagesAbb Artu 2014haldrik5966No ratings yet
- Lecture#7Document43 pagesLecture#720pwmct0739No ratings yet
- Ict Study Notes Chapter 1-8Document7 pagesIct Study Notes Chapter 1-8faryal khanNo ratings yet
- Skiip 25Ac126V1: Miniskiip 2Document4 pagesSkiip 25Ac126V1: Miniskiip 2Max TeleNo ratings yet
- GSE ElectricDocument46 pagesGSE ElectricoespanaNo ratings yet
- ExplorerDocument6 pagesExplorernaelsondecastroNo ratings yet
- Indian Standard - Code of Practice For EarthingDocument110 pagesIndian Standard - Code of Practice For EarthingTËÇH BÜDDYNo ratings yet
- PowerFlex 753 - A - 1.010 (Released 11 - 2009) - 14.005 Signed (Released 2 - 2021)Document41 pagesPowerFlex 753 - A - 1.010 (Released 11 - 2009) - 14.005 Signed (Released 2 - 2021)karamovulviNo ratings yet
- ZTE ZXSDR B8200 Product DescriptionDocument31 pagesZTE ZXSDR B8200 Product Descriptionrdmiguel_1983685% (13)
- MPCDocument3 pagesMPCNicholas WilliamsNo ratings yet
- Basic Router Hardware Concept - Switch Fabric (V2.0)Document22 pagesBasic Router Hardware Concept - Switch Fabric (V2.0)David IsturNo ratings yet
- The Managing Director Odogunyan Industrial Estate Ikorodu - Lagos State Attention: MRDocument3 pagesThe Managing Director Odogunyan Industrial Estate Ikorodu - Lagos State Attention: MROlayiwola OnasanyaNo ratings yet
- L18 Matching LayoutDocument41 pagesL18 Matching LayouttejanossamNo ratings yet
- IEC SellsheetDocument12 pagesIEC SellsheetZelectronNo ratings yet
- A Quick Guide To Resistor Sizes and PackagesDocument8 pagesA Quick Guide To Resistor Sizes and PackagesAmbachew2006No ratings yet