You might also like
- Book of Lost Spells (Necromancer Games)Document137 pagesBook of Lost Spells (Necromancer Games)Rodrigo Hky91% (22)
- Linux: A Comprehensive Guide to Linux Operating System and Command LineFrom EverandLinux: A Comprehensive Guide to Linux Operating System and Command LineNo ratings yet
- Operating System CompleteDocument59 pagesOperating System CompleteJasperFabella100% (1)
- NBME Step 2 Form 3Document45 pagesNBME Step 2 Form 3bostickdrew16100% (1)
- Option StrategiesDocument13 pagesOption StrategiesArunangshu BhattacharjeeNo ratings yet
- Pronunciacion Módulo 7Document12 pagesPronunciacion Módulo 7Antonio Javier Osorio Gomez100% (1)
- Pcog MnemonicsDocument4 pagesPcog MnemonicsFanBay100% (4)
- Bunkers & Badasses - V1Document272 pagesBunkers & Badasses - V1Dracala100% (3)
- Spotlight I1 2023Document70 pagesSpotlight I1 2023Raul Alejandro Celis MaturanaNo ratings yet
- Operating Systems Lecture Notes-1Document15 pagesOperating Systems Lecture Notes-1Arun Sasidharan100% (1)
- Drug StudyDocument7 pagesDrug Studykakienz100% (7)
- Detailed Lesson Plan in English 5 First Quarter Week 2 - Day 2 I. ObjectivesDocument3 pagesDetailed Lesson Plan in English 5 First Quarter Week 2 - Day 2 I. ObjectivesElvz C. DionesNo ratings yet
- 125.052 - Travel Wide v. CA (1991) - DigestDocument4 pages125.052 - Travel Wide v. CA (1991) - DigestJames LouNo ratings yet
- "Unleashing the Power of Assembly Language: Mastering the World's Most Efficient Code"From Everand"Unleashing the Power of Assembly Language: Mastering the World's Most Efficient Code"No ratings yet
- TRB Study Materials Operating System: WWW - Governmentexams.co - in 1Document9 pagesTRB Study Materials Operating System: WWW - Governmentexams.co - in 1Jeyaraman DhanarajNo ratings yet
- The Metrical Dindshenchas Vol 4 Edited by Edward Gwynn (1906)Document114 pagesThe Metrical Dindshenchas Vol 4 Edited by Edward Gwynn (1906)TerryandAlanNo ratings yet
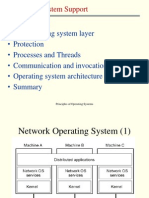
- Operating System Support: IntroductionDocument9 pagesOperating System Support: IntroductionCse PicsNo ratings yet
- Operating SystemDocument4 pagesOperating Systemfaizaman1461No ratings yet
- Unit-IV Operating System SupportDocument23 pagesUnit-IV Operating System SupportKrishna Satya Varma ManthenaNo ratings yet
- Data Structures Unit 5Document9 pagesData Structures Unit 5Animated EngineerNo ratings yet
- Introduction, The Operating System Layer, Protection, Process and Threads Address Space, Creation of A New Process, ThreadsDocument10 pagesIntroduction, The Operating System Layer, Protection, Process and Threads Address Space, Creation of A New Process, ThreadsSurya BhaskerNo ratings yet
- Operating System SupportDocument6 pagesOperating System SupportoljiraaNo ratings yet
- UNIT-1 Operating System - Concepts:: DefinitionDocument10 pagesUNIT-1 Operating System - Concepts:: DefinitionRajeswaranaidu DarsiNo ratings yet
- OS Unit-1 NotesDocument8 pagesOS Unit-1 NotesJaykishor SinghNo ratings yet
- UNIT-IV - Operating System SupportDocument51 pagesUNIT-IV - Operating System SupportsatyaNo ratings yet
- Linux ReadingDocument63 pagesLinux Readingkookeet taylorNo ratings yet
- UNIT-1 Introduction To Linux Operating System 1. What Is An Operating System and Types of Operating SystemsDocument27 pagesUNIT-1 Introduction To Linux Operating System 1. What Is An Operating System and Types of Operating Systemsprudhvi saiNo ratings yet
- Operating System NotesDocument6 pagesOperating System NotesRahul KumarNo ratings yet
- Operating System Unit 1 & 2 Intro NotesDocument48 pagesOperating System Unit 1 & 2 Intro NotesLaxmi Computer Science and EngineeringNo ratings yet
- MIT-101-Acitvity 1-Operating System and NetworkingDocument5 pagesMIT-101-Acitvity 1-Operating System and NetworkingCarlo Moon CorpuzNo ratings yet
- An Operating SystemDocument97 pagesAn Operating SystemBaptist GHNo ratings yet
- Chapter Two: Introduction To Linux Operating SystemDocument25 pagesChapter Two: Introduction To Linux Operating Systembalj balhNo ratings yet
- Q1. A) What Are The Two Criteria For Classification of The Advanced Operating Systems? Discuss Any Two Operating Systems in Both The CategoriesDocument27 pagesQ1. A) What Are The Two Criteria For Classification of The Advanced Operating Systems? Discuss Any Two Operating Systems in Both The Categoriesdevil angelNo ratings yet
- Sun TrainingDocument399 pagesSun TrainingArun Praveen100% (2)
- MSCIT 4th COMP2115 1,2,3Document23 pagesMSCIT 4th COMP2115 1,2,3countsohaib.asNo ratings yet
- Welcome: Eds Sun Level - 1 TrainingDocument399 pagesWelcome: Eds Sun Level - 1 Trainingchandrashekar_ganesanNo ratings yet
- OS Project 1Document16 pagesOS Project 1NarayanaMunnaNo ratings yet
- Comparative Study of DOS and NOSDocument22 pagesComparative Study of DOS and NOSBhushan JadhavNo ratings yet
- Operating SystemsDocument9 pagesOperating SystemsSaloni JainNo ratings yet
- Os NotesDocument49 pagesOs NotesdiplomadosthaNo ratings yet
- Os Notes (1) MergedDocument61 pagesOs Notes (1) MergeddiplomadosthaNo ratings yet
- Chapter Three ProcessDocument27 pagesChapter Three ProcessPro NebyuNo ratings yet
- Introduction To OsDocument6 pagesIntroduction To OsSakshiNo ratings yet
- Chapter 1Document60 pagesChapter 1Shalinie Anbu ChelianNo ratings yet
- Operating System - Quick GuideDocument64 pagesOperating System - Quick GuideVigneshwar .sNo ratings yet
- Note 4Document5 pagesNote 4DEBUGH247 ON TELEGRAMNo ratings yet
- Os Notes PDFDocument115 pagesOs Notes PDFVishnu PalNo ratings yet
- Operating System Concepts 8th Edition Chapter 1 SummaryDocument2 pagesOperating System Concepts 8th Edition Chapter 1 SummaryAlfred Fred100% (1)
- Seminar Report On Threads in DsDocument23 pagesSeminar Report On Threads in DsAnjan SarmaNo ratings yet
- Introduction: Operating System SupportDocument63 pagesIntroduction: Operating System SupportErmercado78No ratings yet
- ReadyDocument11 pagesReadyrakeshgamer504No ratings yet
- Linux TutorialDocument10 pagesLinux TutorialRadwa EhabNo ratings yet
- (M8-MAIN) - Operating Systems v1Document129 pages(M8-MAIN) - Operating Systems v1williemcgillie32No ratings yet
- CompatibilitymodeDocument42 pagesCompatibilitymodeAnil KumarNo ratings yet
- Basics of Operating Systems: Drnmpatel Associate Professor Computer Engineering Department BVM Engineering CollegeDocument63 pagesBasics of Operating Systems: Drnmpatel Associate Professor Computer Engineering Department BVM Engineering Collegeध्यान आर्य विद्यार्थीNo ratings yet
- Unit - 1 Introduction To Operating SystemDocument30 pagesUnit - 1 Introduction To Operating SystemSatvir SinghNo ratings yet
- OS 2021 SolutionDocument25 pagesOS 2021 SolutionSachin SharmaNo ratings yet
- Learning Materials-Chapter-2-OSDocument8 pagesLearning Materials-Chapter-2-OSSheeraz ArifNo ratings yet
- Aos Sa1Document14 pagesAos Sa1Yan YanNo ratings yet
- Operating Systems: Lecture NotesDocument222 pagesOperating Systems: Lecture NotesMinuJose JojyNo ratings yet
- (Aos) M1Document6 pages(Aos) M1Faith SangilNo ratings yet
- W5 - IT102 - Unit2 - Lesson 5Document26 pagesW5 - IT102 - Unit2 - Lesson 5Aldrei BobierNo ratings yet
- Assignment 1 OSDocument3 pagesAssignment 1 OSHassan ImtiazNo ratings yet
- Chapter 3: Operating-System StructuresDocument31 pagesChapter 3: Operating-System StructuresDiamond MindglanceNo ratings yet
- Local Media1573882515330750904Document13 pagesLocal Media1573882515330750904Alliah MendozaNo ratings yet
- Types of Operating SystemDocument3 pagesTypes of Operating SystemAeafafNo ratings yet
- Web EvaluationDocument22 pagesWeb EvaluationjosekinNo ratings yet
- 2.services and Component of OS NotesDocument11 pages2.services and Component of OS NoteshshsgNo ratings yet
- Chapter 8-Operating System Notes 2Document44 pagesChapter 8-Operating System Notes 2Zilly cocoNo ratings yet
- Intro To Operating SystemDocument10 pagesIntro To Operating SystemAvik BachharNo ratings yet
- “Information Systems Unraveled: Exploring the Core Concepts”: GoodMan, #1From Everand“Information Systems Unraveled: Exploring the Core Concepts”: GoodMan, #1No ratings yet
- Science Technology and Society MidtermsDocument16 pagesScience Technology and Society MidtermsDARYL JAMES MISANo ratings yet
- Intax Quiz 2: B. Winterfell Could Deduct Its P6 Million Loss From Its P5 Million GainDocument2 pagesIntax Quiz 2: B. Winterfell Could Deduct Its P6 Million Loss From Its P5 Million GainBLACKPINKLisaRoseJisooJennieNo ratings yet
- Mining Plan: M/S Gyanchandani Purshotam Stone CrusherDocument45 pagesMining Plan: M/S Gyanchandani Purshotam Stone Crushervarun2860No ratings yet
- CONFESSIONDocument21 pagesCONFESSIONCarie Love BalanbanNo ratings yet
- Rules For Writing Out DollarsDocument7 pagesRules For Writing Out DollarsDũng Đào TrungNo ratings yet
- AJPDocument35 pagesAJPAnonymous g5Xzu4V8No ratings yet
- Moldplus V10 7 Quick Start GuideDocument76 pagesMoldplus V10 7 Quick Start GuideBelal AhmedNo ratings yet
- Subsequent Measurement Accounting Property Plant and EquipmentDocument60 pagesSubsequent Measurement Accounting Property Plant and EquipmentNatalie SerranoNo ratings yet
- Anisa Rahma (1219063) Fsyar Hes-2Document15 pagesAnisa Rahma (1219063) Fsyar Hes-2Anisa RahmaNo ratings yet
- Analysis of Psychological Well-Being in High GradeDocument7 pagesAnalysis of Psychological Well-Being in High GradeFeiNo ratings yet
- Video Rubric: Poor 3 - 5 Pts Fair 6-7 Pts Excellent 8 - 10 PtsDocument1 pageVideo Rubric: Poor 3 - 5 Pts Fair 6-7 Pts Excellent 8 - 10 PtsHana mae ChurpingNo ratings yet
- Datasheet - TDL 450L and TDL 450H Radio - English USL - ScreenDocument2 pagesDatasheet - TDL 450L and TDL 450H Radio - English USL - ScreenMohammed Nasreldeen AgabNo ratings yet
- Orca Share Media1499047943071Document183 pagesOrca Share Media1499047943071Jeneva Castillo AbadillaNo ratings yet
- Rice Is NiceDocument3 pagesRice Is Niceammayi100No ratings yet
- NYIT Academy Media Consent Form: Youssef Ali Abdelkader 08 July, 2020Document1 pageNYIT Academy Media Consent Form: Youssef Ali Abdelkader 08 July, 2020Youssef AliNo ratings yet
- Social Media SpecialistDocument2 pagesSocial Media Specialistjugal bariNo ratings yet
- Chapter 15 - Air ConditioningDocument121 pagesChapter 15 - Air ConditioningWawNo ratings yet
- DCMMMNHS - Work Immersion Proper and Post ImmersionDocument3 pagesDCMMMNHS - Work Immersion Proper and Post ImmersionTresita B. RiosNo ratings yet
- QM-001 QMS-Quality ManualDocument13 pagesQM-001 QMS-Quality ManualFERNANDO MORANTESNo ratings yet