Professional Documents
Culture Documents
Go-Karting: K.B.P. COLLEGE OF ENGG. SATARA. (Production Engg. Dept.)
Uploaded by
Antonio SilvaOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Go-Karting: K.B.P. COLLEGE OF ENGG. SATARA. (Production Engg. Dept.)
Uploaded by
Antonio SilvaCopyright:
Available Formats
GO-KARTING
CHAPTER 1
INTRODUCTION
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 1
GO-KARTING
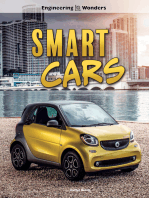
Figure 1: Go-kart
In the 1950’s a group of tinkerers and thrill seekers in Southern California welded
together a crude frame from steel tubing, mounted it on wheels intended for wheel barrows,
powered the contraption with a small 3 HP engine intended for lawn mowers and raced it around
the parking lot of the Rose Bowl in Pasadena. These vehicles, now called "go-karts" have grown
into a multi-billion dollar industry in the USA and throughout the developed world. They are
made, sold, and used exclusively as recreational racers. They are not designed for transportation
and it is illegal in most places to drive them on the road.
These vehicles are typically 30 inches wide, 4 to 5 feet long, and weigh between 50 and
70 pounds. They are simple and inexpensive to build and operate and they can travel on rough
terrain and roads at speeds exceeding 20 miles per hour. It is estimated that large volume export
OEM contracts could be negotiated somewhere near half this amount. Alternate Asian sources
particularly China or S. Korea might yield lower cost designs. Chinese-made 4-cycle irrigation
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 2
GO-KARTING
pump engines are widely available in Asia for around $100 and these may be substituted for
lawn mower engines in Asian designs. An additional consideration in favor of the irrigation
pump engines is that 4- cycle engines are less polluting and many countries in Asia are phasing
out the use of 2-cycle engines for that reason.
Normally a 30-inch wheelbase is used with 1" by 36" threaded axles and 3 to 6 inches of
ground clearance depending on type of terrain the vehicle is expected to traverse. A very
elementary steering system of the tie-and-rod variety is sufficient. Brakes may be 4-1/2 inch
band or drum design. Eight-inch to 14-inch standard wheels from the garden supply industry
may be utilized. The other significant components are the clutch and sprocket assembly,
bearings, and a throttle control assembly.
Even in their most primitive forms go karts may be adapted as transportation technology
in developing countries to leverage economic growth and poverty alleviation. Go karts offer a
simple and inexpensive technology that meets many rural transportation needs. The technology
is a bridge between simple pushcarts and rickshaws on one hand and the automobile and truck
technology designed to western specifications on the other. The relative inefficiency of the
former technology is the very cause of poverty in many areas while the cost and technology
burden of the latter make them inaccessible to the poor.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 3
GO-KARTING
Feasibility of a Sustainable Go-Kart
The necessary conditions for sustainability of a go-kart project for rural development
include economic, social, and technical issues. Some of the questions that must be addressed
include the following: (Howe and Richards 1984, World Bank 1996, Howe 1999)
Transport infrastructure: Can the existing rural road network be used by
go-karts?
Demand for new services: Will the villagers use this technology? Do they
need it?
Financial feasibility: Will capital be available for investment in go-kart
manufacturing?
Financial feasibility: Can the villagers afford to purchase, operate, and
maintain go-karts? Will credit be available?
Economic feasibility: Will the use of go-karts by villagers increase their
standard of living?
Technical feasibility: Does the technical expertise exist among villagers to
operate and maintain these machines?
Industrial feasibility: Does an industrial infrastructure exists that can
supply parts and labor for the manufacture of go-karts?
Political feasibility: Will go karts and their environmental and economic
impact on rural life be acceptable to those in power?
Social sustainability: Will the new technology be adopted as an integral
part of the rural society and will benefits of improved transport reach all
sections of the community? Will it help the poor?
A well-developed cottage industry infrastructure exists in Bangladesh even in rural areas
for the introduction of go-kart technology. Both machine shops and welding shops may be found
at most small population centers throughout the country and the operators are skilled in their
work. Small two-cycle engines have been adapted for urban and rural transport as "baby taxis"
and "tempos" throughout the country. These are 3-wheeled passenger as well as freight vehicles.
Their maintenance and chassis manufacture is a wide-scale cottage industry in both urban and
rural areas.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 4
GO-KARTING
Bicycles, rickshaws, and rickshaw-based freight vehicles called "vans" are also
manufactured in small shops throughout the country. Truck maintenance shops provide yet
another source of technical skill that may be adapted for the introduction of go-karts to the
country as a cottage industry in a de-centralized implementation. There are many motor sports in
the world. Bikes, Cars, Formula one are examples of them. The drivers in these are very
professional. They can drive it very fast. But there are also motor sports which do not need
professional drivers and need no great speed. The vehicles used are also very cheap. Such a
motor sport is Go-Karting
They resemble to the formula one cars but it is not as faster as F1 and also cost is very
less. The drivers in go-karting are also not professionals. Even children can also drive it. Go-
karts have 4 wheels and a small engine. They are widely used in racing in US and also they are
getting popular in India.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 5
GO-KARTING
Scope of the project
Go-Karting is a big craze to the Americans and Europeans. It is initially created in United
States in 1950s and used as a way to pass spare time. Gradually it became a big hobby and other
countries followed it. In India go-karting is getting ready to make waves. A racing track is ready
in Nagpur for go-karting and Chennai is also trying to make one.
Indian companies are also producing go-karts in small scale. MRF and Indus motors are
the major bodies in karts and they are offering karts between 1lakh and 3 lakh. But to make go-
karts popular, the price must come down. For that, many people are trying to build one under 1
lakh and we had also take up the challenge. A go-kart just under Rs. 25,000/-. So we are sure that
our project will have a high demand in the industry and also we are hoping to get orders from the
racing guns.
About go – karts
Go-kart is a simple four-wheeled, small engine, single seat racing car used mainly in
United States. They were initially created in the 1950s. Post-war period by airmen as a way to
pass spare time. Art generally accepted to be the father of karting. He built the first kart in
Southern California in 1956. From them, it is being popular all over America and also Europe.
A Go-kart, by definition, has no suspension and no differential. They are usually raced on scaled
down tracks, but are sometimes driven as entertainment or as a hobby by non-professionals.
Karting is commonly perceived as the stepping shone to the higher and more expensive ranks of
motor sports. Kart racing is generally accepted as the most economic form of motor sport
available. As a free-time activity, it can be performed by almost anybody and permitting licensed
racing for anyone from the age of 8 onwards.
Kart racing is usually used as a low-cost and relatively safe way to introduce drivers to
motor racing. Many people associate it with young drivers, but adults are also very active in
karting. Karting is considered as the first step in any serious racer’s career. It can prepare the
driver for highs-speed wheel-to-wheel racing by helping develop guide reflexes, precision car
control and decision-making skills. In addition, it brings an awareness of the various parameters
that can be altered to try to improve the competitiveness of the kart that also exist in other forms
of motor racing.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 6
GO-KARTING
Go-Karts in India
Go-karts emerged in India in 2003 from MRF, which has a 250cc two-stroke engine,
which produce 15 bhp of power, which costs around 3 lakh. Indus motors are also offering Go-
karts for 1 lakh to 3 lakh. There are racing tracks in Nagpur for go-karting, which is known as
the home of go-karts in India. Many people take part in the racing and its getting popular.
Go-Karts in Foreign Countries
Go-karts in foreign countries have much more performance than the Indians. One type is
a single engine 160cc 4-stroke kart with a maximum speed of around 40 mph and second type, a
twin-engine 320cc 4-stroke kart used in outdoor with a maximum speed of 70 mph. There are
hundreds of racing tracks in US for karting and also they are much more professional than the
Indians.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 7
GO-KARTING
Parts of a go – kart
In a Go-Kart, there are mainly six parts. They are,
1. Chassis
2. Engine
3. Steering
4. Transmission
5. Tyres
6. Brake
7. Electric Starter
CHASSIS:
The chassis is an extremely imported element of the kart, as it must provide, via flex, the
equivalent of suspension to give good grip at the front. Karts have no suspension, and are usually
no bigger than is needed to mount a seat for the driver and a small engine. Chassis construction
is normally of a square tube construction, typically MS with different grades. In this kart, we use
MS tube with 1” diameter. The chassis support the power unit, power train, the running system
etc.
The Chassis construction:
The chassis of a Go-Kart consists of following components suitably mounted:
i. Engine
ii. Transmission system, consisting of the chain sprocket, rear axle.
iii. Road wheels.
iv. Steering system.
v. Brake.
vi. Fuel tank.
All the components listed above are mounted on the conventional construction, in which
a separate frame is used and the frameless or unitary construction in which no separate frame is
employed.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 8
GO-KARTING
Conventional Construction: In this type of chassis construction the frame is the basic unit to
which various components are attached and body is bolted onto the frame later on.
Function of the frame:
1) To support the chassis components and body.
2) To withstand static and dynamic loads without undue deflection or distortion.
Loads on the frame:
1) Weight of the vehicle and the passenger, which causes vertical bending of the side members.
2) Vertical loads when the vehicle comes across a bump or hollow, which results in longitudinal
torsion due to one wheel lifted (or lowered) with other wheels at the usual road level.
3) Loads due to road chamber, side wind and cornering force while taking a turn, which results
in lateral bending of side members.
4) Load due to wheel impact with road obstacles may cause that particular wheel to remain
obstructed while the other wheel tends to move forward, distorting the frame to parallelogram
shape.
5) Engine torque and braking torque tending to bend the side members in the vertical plane.
6) Sudden impact loads during a collision, which may result in a general collapse.
Frame construction: A simplified design representing the frame shows the longitudinal
members ‘A’ and cross members ‘B’. The frame is narrowed at the front as shown in to have
better steering lock, which gives a smaller turning circle. ‘C’ is the brackets supporting the body.
The extension of the chassis frame ahead of the front axle is called Front overhung, whereas its
extension beyond the rear is called Rear overhung. The engine and the transmission are all
bolted together to form one rigid assembly which is mounted usually on the rear end of the
frame. Various cross-sections used for the side members or cross-members of the chassis frame.
We used Channel section. It is seen that the channel section have bending stiffness’s as 6.5 and
7.2 compared to a Solid square with equal cross-sectional area whose stiffness is taken as 1.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 9
GO-KARTING
Materials for frame: There are so many materials can be used for making frames like steel,
iron. We used MS for chassis.
Defects in frame: The only prominent defect that usually occurs in the frames due to accidents
is the alignment fault. This may be checked by means of a plumb line. The vehicle is placed on a
level surface and by suspending plumb line from four different points on each side of the frame;
their position on the ground is marked. The vehicle is then taken away and the diagonals are
measured between corresponding points. These should not differ by more than 7 or 8 mm. If any
of the corresponding diagonals do differ by more than this amount, the frame is out of alignment.
The possible cause, then, may be any one of the following:
1) The dumb irons or side members may be bent.
2) Cross members may be bulky.
3) Some rivets may be loose or broken.
If the damage to the frame members is small, they can be repaired by means of a hydraulic jack
and wringing irons. If the damage is more, the bent frame member may be heated to straighten it.
Another alternative may be to cut the damaged part and weld a new one instead.
Engine:
An engine of a go-kart is usually a small one about 80cc. In this kart, we use a kinetic
Honda Single Cylinder 98cc 2-stroke petrol engine, which produces about 7.7 BHP@5600 rpm..
We use 2- stroke engine because this is used for racing. So there is no need of mileage.
Steering system:
The steering of a go-kart is very sensitive. Rack-and-pinion steering is quickly becoming
the most common type of steering on cars, small trucks and SUVs. It is actually a pretty simple
mechanism. A rack-and-pinion gear set is enclosed in a metal tube, with each end of the rack
protruding from the tube. A rod, called a tie rod, connects to each end of the rack.
The pinion gear is attached to the steering shaft. When you turn the steering wheel, the
gear spins, moving the rack. The tie rod at each end of the rack connects to the steering arm on
the spindle
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 10
GO-KARTING
Transmission
Transmission means the whole of the mechanism that transmits the power from the
engine crankshaft to the rear wheels. In this vehicle, the power from the engine is transmitted to
the sprockets using chain, i.e. this is chain drive. The driver sprocket has 9teeth and driven
sprocket has 45 teeth. Usually go-karts do not have a differential and so we eliminate differential
from our vehicle also. And also this go-kart has no clutch and gears because this is automatic
transmission. Belt and pulley type CVT issued in this kart. The power from the engine is
transmitted to the rear two wheels using chain drive. We use chain drive because it is capable of
taking shock loads.
Introduction: The word ‘transmission’ as introduced in the beginning of this book means the
whole of the mechanism that transmits the power from the engine crankshaft to the rear wheels.
Necessity of Transmission: The question as to how far is the transmission necessary in a vehicle
may be answered by considering.
Variation of resistance to the vehicle motion at various speeds.
Variation of attractive effort of the vehicle available at various speeds.
Chain Drive:
Determining the number of teeth for the driver sprocket Choose the suitable number of
teeth in Accor- dance with the recommendations regarding sprocket selection criteria.
Determination of chain speed on grounds of the sprocket revolution is based on the formula:
chain speed:
v = do.n/19,100 (m/s) wherein:
do = sprocket reference diameter in mm
n = sprocket revolution (r.p.m)
v = chain velocity (m/s) 19,100 = constant
The sprocket revolution can also be derived from chain speed and the reference diameter
by simply rearranging the above formula: Sprocket revolution: n = (r.p.m.)
finally, the required sprocket reference diameter can be derived from the shaft revolution and
chain velocity: do = (mm)
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 11
GO-KARTING
Tyres
For go-karts, wheels and tyres are much smaller than those used on a normal car. The
tyres will have increased grip and a hard one. And also it can withstand the high temperature. In
this kart, we use tyres having 15” dia for front and for rear. This is used for an aerodynamic
shape. The tyres must have pressure of at least 18 psi.
Figure 2: Parts of tyre
Wheels and tyres
Introduction
The importance of wheels and tyres in automobile is obvious. Without the engine the car
may be towed, but even that is not possible without the wheels. The wheel, along the tyre has to
take the vehicle load, provide a cushioning effect and cope with the steering control. The various
requirement of an automobile wheel are:
1. It must be strong enough to perform the above function.
2. It should be balanced both statically as well as dynamically.
3. It should be lightest possible so that the un sprung the wheel easily.
4. It should be possible to remove or mount the wheel easily.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 12
GO-KARTING
5. Its material should not deteriorate with weathering and age. In case, the material
is susceptible to corrosion, it must be given suitable protective treatment.
Types of tyres
The use of solid tyre on automobile is now obsolete and only the pneumatic tyres are universally.
There pneumatic tyres may be classified according of following consideration:
1. Basic construction.
2. Use.
3. Ability to run flat.
Figure 3: Construction of tyre
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 13
GO-KARTING
Tyre Specifications
1 .Tyre Width:
The75 is the width of the tyre in millimeters (mm), measured from sidewall to sidewall.
Since this measure is affected by the width of the rim, the measurement is for the tyre when it is
on its intended rim size.
2 .Aspect Ratio:
This number tells you the height of the tyre, from the bead to the top of the tread. This is
described as a percentage of the tyre width. In our example, the aspect ratio is 75, so the tyres
height is 75 percent of its width, or 56.25 mm (75 x 75 =56.25 mm, or 2.25 in). The smaller the
aspect ratio, the wider the tyre in relation to its height. Two tyres with different aspect ratios but
the same overall diameter high performance tyres usually have a lower aspect ratio than other
tyres. This is because tyres with a lower aspect ratio provide better lateral stability. When a car
goes around a turn lateral forces are generated and the tyre must resist these forces. Tyres with a
lower profile have shorter, stiffer sidewalls so they resist cornering forces better.
3 .Tyre Construction:
The R designates that the tyre was made using radial construction. This is the most
common type of tyre construction. Older tyres were made using diagonal bias (D) or bias belted
(B) construction. A separate note indicates how many plies make up the sidewall of the tyre and
the tread.
4 .Rim Diameter:
This number specifies, in inches, the wheel rim diameter the tyre is designed for. The
service description consists of two things.
Load Ratings
The load rating is a number that correlates to the maximum rated load for that tyre. A
higher number indicates that the tyre has a higher load capacity. The rating “105,” for example,
corresponds to a load capacity of 2039 pounds (924.87 kg). A separate note on the tyre indicates
the load rating at a given inflation pressure.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 14
GO-KARTING
Speed Rating
The letter that follows the load rating indicates the maximum speed allowable for this tyre (as
long as the weight is at or below the rated load). For instance, S indicates that the tyre can handle
speeds up to 112 mph (180.246 kph). See the chart on this page for all the ratings.
5 . Calculating the tyre Diameter:
Now that we know what these numbers mean, we can calculate the overall diameter of a tyre.
We multiply the tyre width by the aspect ratio to get the height of the tyre. Tyre height = 75 x 75
percent = 56.25 mm (2.25 in) Then we add twice the tyre height to the rim diameter. 2 x 2.25 in
+ 15 inches = 19.5 in (487.5 mm) this is the unloaded diameter; as soon as any weight is put on
the tyre, the diameter will decrease.
Effect of air pressure on tyre performance:
1 .On dry road/ off-road:
Only properly inflated tyres produce quick response and good handling. The
underinflated tyre require more steering input to initiate maneuvers and are slower to respond.
Beside, under inflated tyre also feel out of synchronization during transition, i.e., instead of
moving in unison, the rear tyre reaction lags behind those of the front tyres, resulting in a
detached sensation being transmitted to the drivers.
2 .On wet road:
A significant underinflated tyre would allow the centre of the tread to collapse and
become very concave, trapping water rather than allowing it to flow through the tread design.
Thus driving the vehicle with the underinflated tyres would be more difficult and would force the
driver to show down to retain control.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 15
GO-KARTING
Tyre materials include basic ingredients like
1.Polymers: They are the backbone of rubber compounds. They consist of natural or synthetic
rubber.
2.Fillers: They reinforce rubber compounds. The most common filler is carbon black although
other materials, such as silica, are used to give the compound unique properties.
3.Softeners: Petroleum oils, pine tar, resins and waxes are all softeners that are used in
compounds principally as processing aids and to improve tack or stickiness of unvaulcanized
compounds.
4.Antidegradents: Waxes, antioxidants, andantiozonants are added to rubber compounds to help
protect tires against deterioration by ozone, oxygen and heat like merino, resole ML wax.
5.Curatives: During vulcanization or curing, the polymer chains become linked, transforming
the viscous compounds into strong, elastic materials.
6.Sulphur: along with accelerators and activators help achieve.
Tyre specification:
Tyre size
Front 3.5" x 10−4 PR (Ply Rating)
Rear 3.5" x 10−4 PR
Wheel And Tyre Trouble Shooting:
1. Wheel bounce or tramp: The most obvious reason for this is the eccentricity of wheel and
tyre. If on checking, eccentricity is not found, the defect may be due to incorrect tyre pressure,
statically unbalanced wheels or statically unbalanced brake drum. To determine which particular
wheels is causing bounce, inflate all tyres to higher pressure of 350 kpa and drive over the same
road. If now the bounce is eliminated, decrease the air pressure to recommended valve in one
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 16
GO-KARTING
tyre at a time and repeat the road test. Repeat this procedure till the entire tyre has been tested in
manner, i.e., one tyre at the recommended pressure and three tyres at the higher pressure. When
the bounce again develops, the tyre at the recommended pressure is the defective one which must
be replaced. This method of isolating the defective tyres is very effective in case of cross ply
tyres, but is not so effective in case of radial tyres.
2. Wheel wobble or shimmy: This may be due to wearing out of the hub bearing of the wheel
affected in which case it should be replaced. This defect may also be caused due to dynamic
unbalance, which itself may be due to several reasons such as bucked wheel, incorrectly fitted
tyre, bent axle shaft.
3. Side wear of tyres: When the tyre wears more at the side than at the side than at the center, it
is due to low tyre pressure.
4. One-side wear of tyre: This may be due to incorrect camber angle of incorrect toe in or
sagging axle on account of overloading. Continues running on high cambered road may also
result in this type of were.
5. Centre: The reason for this is the high tyre pressure.
6 .Uneven tyre wear: This is due to bucked wheel or the tyre and wheel assembly being out of
balance. Sudden acceleration and braking also result in this type of were.
7. Uniform rapid wear: Driving on rough road or fast driving are the causes of the uniform but
rapid were. It is estimated that were of tyre at a speed of 80 kph. Is approximately twice than at a
speed of 50 kph.
8. Rapid were with feathered edge on the tread: This type of wear may be detected by placing
figure on the tread and moving slowly in the cross direction, first on one side and then on the
other. This means the tyre has also been skidding. This may be due to incorrect wheel alignment.
On rear axle this may be due to misalignment of chassis and displacement of axle.
9. Tread cracking:This is due to overloading, over inflation or under inflation.Typically,go-
karts will have a single rear drum brake, which is situated on the rear axle.The brake will capable
for stopping the kart running in 40 mph. The pedals actuated by the left leg operate the brakes.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 17
GO-KARTING
Brake
Principle: A drum brake is a brake that uses friction caused by a set of shoes or pads that press
against a rotating drum-shaped part called a brake drum. It goes without saying that brakes are
one of the most important control components of vehicle. They are required to stop the vehicle
within the smallest possible distance and this is done by converting the kinetic energy of the
vehicle into the heat energy which is dissipated into the atmosphere. The term drum brake
usually means a brake in which shoes press on the inner surface of the drum.
Figure 4: Drum Brake
Braking Requirements: The brake must be strong enough to stop the vehicle within a minimum
distance in an emergency. But this should also be consistent with safety. The driver must have
proper control over the vehicle during emergency braking and the vehicle must not skid .The
brakes must have good ant fade characteristics, their effectiveness should not decrease with
constant prolonged application. This requirement demands that the cooling of the brakes should
be very efficient.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 18
GO-KARTING
Stopping Distances for brake on basis of efficiency:
Table No: 1
Efficiency % Stopping Distance
30 km/h 50 km/h 80 km/h 100 km/h
100 3.2 9.8 25.2 25.2
80 4.4 12.2 31.5 31.5
60 6.0 16.3 42.0 42.0
30 12.0 32.6 84.0 84.0
The distances given in the table are approximate only and they vary with the type of the
road surface and condition of tyre tread. Thus the actual stopping distances will be more than the
values given in table which is based upon deceleration only. These depend upon:
1. Vehicle speed
2. Condition of the road surface
3. Condition of tyre tread
4. Coefficient of friction between the tyre tread and the road surface
5. Coefficient of friction between the brake drum and the brake lining
6. Braking force applied by the driver.
Construction: Drum brake components include the backing plate, brake drum, shoe, wheel
cylinder, and various springs and pins.
Backing plate: The backing plate provides a base for the other components. It attaches to the
axle sleeve and provides a non-rotating rigid mounting surface for the cam, brake shoes, and
assorted hardware.
Brake drum: The brake drum is generally made of a special type of cast iron that is heat-
conductive and wear-resistant. It rotates with the wheel and axle.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 19
GO-KARTING
Cam: It is situated between two brake shoes, which are operated by the brake pedal. It pushes
Brake shoe outward.
Brake shoe: Brake shoes are typically made of two pieces of sheet steel welded together. The
friction material is either riveted to the lining table or attached with adhesive. The crescent-
shaped piece is called the Web and contains holes and slots in different shapes for return springs,
hold-down hardware, parking brake linkage and self-adjusting components. The edge of the
lining table generally has three “V"-shaped notches or tabs on each side called nibs. The nibs rest
against the support pads of the backing plate to which the shoes are installed. Each brake
assembly has two shoes, a primary and secondary.
Brake lining: Linings must be resistant against heat and wear and have a high friction
coefficient unaffected by fluctuations in temperature and humidity. Materials that make up the
brake shoe include, friction modifiers (which can include graphite and cashew nut shells),
powdered metal such as lead, zinc, brass, aluminum and other metals that resist heat fade,
binders, curing agents and fillers such as rubber chips to reduce brake noise.
Normal braking: When the brakes are applied, cam get operated, which in turn pushes the brake shoes
into contact with the machined surface on the inside of the drum. This rubbing action reduces the rotation
of the brake drum, which is coupled to the wheel. Hence the speed of the vehicle is reduced. When the
pressure is released, return springs pull the shoes back to their rest position.
Automatic self-adjustment: As the brake linings wear, the shoes must travel a greater distance
to reach the drum. When the distance reaches a certain point, a self-adjusting mechanism
automatically reacts by adjusting the rest position of the shoes so that they are closer to the drum.
Here, the adjusting lever rocks enough to advance the adjuster gear by one tooth. The adjuster
has threads on it, like a bolt, so that it unscrews a little bit when it turns, lengthening to fill in the
gap. When the brake shoes wear a little more, the adjuster can advance again, so it always keeps
the shoes close to the drum.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 20
GO-KARTING
Figure 5:Internal Structure Of Drum Brake
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 21
GO-KARTING
Electric start
Both Otto cycle and Diesel cycle internal-combustion engines require the pistons to be moving
before the ignition phase of the cycle. This means that the engine must be set in motion by an
external force before it can power itself. Originally, a hand crank was used to start engines, but it
was inconvenient and rather hard work to crank the engine up to speed. It was also highly
dangerous. Even though cranks had an overrun mechanism to prevent it, when the engine started,
a crank could begin to spin along with the crankshaft. The operator had to pull away
immediately, or else risk a broken wrist, or worse. Moreover, as engines evolved, they became
larger and compression ratios increased, making hand cranking an increasingly difficult matter.
The modern starter motor is a series-wound direct current electric motor with a solenoid switch
mounted on it. When low-current power from the starting battery is applied to the solenoid,
usually through a key operated switch, it pushes out a small pinion gear on the starter motor's
shaft and meshes it with the ring gear on the flywheel of the engine. The solenoid also closes
high current for the starter motor and it starts to run.
Once the engine starts, the key-operated switch is opened, a spring in the solenoid assembly pulls
the pinion gear away from the ring gear, and the starter motor stops. Modern starter motors have
a "bendy" — a gear and integral freewheel, or overrunning clutch, that enables the flywheel to
automatically disengage the pinion gear from the flywheel when the engine starts.
Starter motor assembly
Other than the main parts, the kart also contains some parts such as Mufflers. The muffler we use
is Baffle type. In baffle type, the exhaust gas passes through a series of baffles, which causes
maximum restriction and hence back pressure. The noise reduction takes place because the
length of travel of exhaust gases increases considerably. Other main part is the headlight. Head
light is provided at the front of the kart for sane night racing. The requirement of automobiles is
that these should illuminate the road ahead at a reasonable distance with sufficient intensity. Also
there is a plastic seat in the kart for the driver. The kart is single seated. There is also a bumper in
front of the kart.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 22
GO-KARTING
CHAPTER 2
DESIGN CALCULATION
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 23
GO-KARTING
Specifications of a go – kart
Engine Displacement (cc) = 98
No. of cylinders = 1
Type of Fuel = Petrol
No. of Strokes = 2
Maximum power (bhp) = 7.7 bhp @ 5600 rpm
No. of gears / variator = Variator
Overall Length (mm) = 1600
Height (mm) = 700
Wheel Base (mm) = 900
Ground Clearance (mm) = 200
Kerb Weight (kg) = 4.43
Fuel tank capacity (litre) = 3.75
Brake = Drum
Type of Cooling = Air cooling
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 24
GO-KARTING
Design and drawings
Chassis:
Type of Material =Square Tube
LxB= 40x40 mm
Axle:
Type of Material = M S
Length of Axle = 900 mm
Diameter of axle = 30 mm
Brake:
Position = Single Rear
Type = Drum Brake
Brake Diameter = 110 mm
Sprocket:
Type of Material = M S
Outer radius of sprocket =180 mm
No. of Teeth = 45
Fuel Tank:
Material = Sheet metal.(Galvanized steel)
Capacity = 3 .75 Liter
Steering Spindle:
Diameter of tube =25 mm
Material = Galvanized iron Tube.
Pedal:
Type of material = M S
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 25
GO-KARTING
Diameter of Rod = 75 mm
Muffler:
Material = Aluminum
Greater diameter of muffler = 100 mm
Total Length = 450 mm
Smaller diameter of muffler = 50 mm
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 26
GO-KARTING
Calculation of turning angle
Figure 6: Steering Gear Mechanism
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 27
GO-KARTING
Calculation
COT𝜃=BP/IP
=3000/900
=3.33
1/tan𝜃=2.44
1/2.44=tan
𝜃=16.69°.
tan−1 0.40
COT∅=AP/IP
=3850/900
1/tan∅=4.27
∅=13.15°
Cot𝜃-Cot∅=c/b
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 28
GO-KARTING
Design
Design consists of application of scientific, principles, technical information and imagination for
development of new or improvised machine or mechanism to perform a specific with maximum
economy and efficiency.
Hence a careful design approach has to be adopted. The total design work has been split
up into two parts;
• System design
• Mechanical Design
System design mainly concerns the various physical constraints and ergonomics, space
requirements, arrangement of various components on main frame at system, man + machine
interaction, No. of controls, position of controls, working environment of machine, chances of
failure, safety, measures to be provided, servicing aids, ease of maintenance, scope of
Improvement, weight of machine from ground level, total weight of machine and a lot more. In
mechanical design the components are listed down and stored on the basis of their procurement,
design in two categories namely,
• Designed Parts
• Parts to be purchased
For designed parts detached design is done and distinctions thus obtained are compared to next
highest dimensions which are readily available in market. This amplifies the assembly as well as
postproduction servicing work. The various tolerances on the works are specified. The process
charts are prepared and passed on to the manufacturing stage.
The parts which are to be purchased directly are selected from various catalogues and specified
so that any body can purchase the same from the retails shop with given specifications.
System design
In system design we mainly concentrated on the following parameters:-
1. System Selection Based on Physical Constraints
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 29
GO-KARTING
While selecting any machine it must be checked whether it is going to be used in a large – scale
industry or a small –scale industry. In our case it is to be used by a small scale industry .So space
is a major constrain. The system is to be very compact so that it can be adjusted to corner of a
room.
The mechanical design has direct norms with the system design. Hence the foremost job is to
control the physical parameters, so that the distinctions obtained after mechanical design can be
well fitted into that.
2. Arrangements of Various Components
Keeping into view the space restrictions the components should be laid such that their easy
Removal or servicing is possible. More over every component should be easily seen none should
be hidden. Every possible space is utilized in components arrangements.
3. Components of System
As already stated the system should be compact enough so that it can be accommodated at a
corner of a room. All the moving parts should be well closed and compact. A compact system
design gives a high weighted structure which is desired.
Man Machine Interaction
The friendliness of a machine with the operator that is an important criteria of design. It is the
application of anatomical and psychological principles to solve problems arising from Man –
Machine relationship. Following are some of the topics included in this section.
Lighting condition of machine.
4. Chances of Failure
The losses incurred by owner in case of any failure are important criteria of design. Factor safety
while doing mechanical design is kept high so that there are Less chances of failure. Moreover
periodic maintenance is required to keep unit healthy.
5. Servicing Facility
The layout of components should be such that easy servicing is possible. Especially those
components which require frequents servicing can be easily disassembled.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 30
GO-KARTING
Scope of Future Improvement
Arrangement should be provided to expand the scope of work in future.
Such as to convert the machine motor operated; the system can be easily configured to required
one. The die and punch can be changed if required for other shapes of notches etc.
6. Height of Machine from Ground
For ease and comfort of operator the height of machine should be properly decided so that he
may not get tried during operation. The machine should be slightly higher than the waist level,
also enough clearance should be provided from the ground for cleaning purpose.
7. Weight of Machine
The total weight depends upon the selection of material components as well as the dimension of
components. A higher weighted machine is difficult in Transportation and in case of major
breakdown; it is difficult to take it to workshop because of more weight.
Mechanical design
Mechanical design phase is very important from the view of designer as whole success of
the project depends on the correct design analysis of the problem.
Many preliminary alternatives are eliminated during this phase Designer should have
adequate knowledge above physical properties of material, loads stresses, deformation, and
failure. Theories and wear analysis. He should identify the external and internal force acting on
the machine parts.
This force may be classified
1] Dead weigh forces
2] Friction forces
3] Inertia forces
4] Centrifugal forces
5] Forces generated during power transmission etc.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 31
GO-KARTING
Designer should estimate these forces very accurately by using design equations. If he
does not have sufficient information to estimate them he should make certain practical
assumptions based on similar conditions. This will almost satisfy the functional needs.
Assumptions must always be on the safer side.
Selection of factors of safety to find working or design stress is another important step in
design of working dimensions of machine elements. The corrections in the theoretical stress
value are to be made according in the kinds of loads, shape of parts and service requirements.
Selection of material should be made according to the condition of loading shapes of products
environments conditions & desirable properties of material
Provision should be made to minimize nearly adopting proper lubrications methods.In,
mechanical design the components are listed down and stored on the basis of their procurement
in two categories.
1] Design parts
2] Parts to be purchased
For design parts a detailed design is done and designation thus obtain are compared to the next
highest dimension which is ready available in market.
This simplification the assembly as well as post production service work. The various
tolerances on the work are specified. The processes charts are prepared and passed on to the
work are specified.
The parts to be purchased directly are selected from various catalogues and specification
so that anybody can purchase the same from retail shop with the given specifications.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 32
GO-KARTING
Axle rotational speed calculations
(1). 5600RPM Motor x 9 Tooth Drive Clutch = (x) RPM x 45 Tooth Sprocket
(x) RPM = 1120 rpm
(2). 5600RPM Motor x Ratio (1) = (x) RPM x Ratio (5)
(x) RPM =1120 rpm
(3). 5600 RPM Motor x (4 x .375) = (x) RPM x (21.0164 x .375)
(x) RPM = 1066
9 Tooth Sprocket Pitch = 4
Tooth Sprocket Pitch = 21.0164
Chain Pitch = .375
15" Tire Diameter - Circumference = 47.125" or 3.9375' (Per Revolution of the
Tire)
1120RPM x 60 min./1 hour = 67,200 Rev/Hour
67,200 Rev/Hour x 3.9375 Feet/Rev = 264600 Feet/Hour
264600Feet/Hour x 1 Mile/5280 Feet = 50.11 Miles/Hour [MPH] (5600 Motor
RPM)
For the Standard/Recommended Motor RPM of 3600 the Speed = 29.6 RPM
Drive Selection Calculations:
Input Speed - 5600 RPM
Output Speed - 1120 RPM
H.P. - 7
Service Factor - S.F. -1.7 (Heavy Shock Load, Internal Combustion Engine)
Design Power - S.F. x H.P. = (1.7) x (7) = 12 H.P.
Ratio = 5
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 33
GO-KARTING
N2(Driven) = N1 Driver x Ratio = 9 (Teeth) x 5 = 45 (Teeth)
n2= n1(N1/N2) = 5600 RPM (9 Teeth/45Teeth) =1120 RPM
D1= p/sin(180°/N1) = 0.375 in./sin(180°/9 Teeth) = 1.09in. (Driver)
D2= p/sin(180°/N2) = 0.375 in./sin(180°/45 Teeth) = 5.37 in. (Driven)
Center Distance - "C" - 40 Pitches (Usually between 30 and 50)
40 x 0.375 in. = 15 in. (Theoretical)
(Actual Center Distance is 16"), so 16" = (x) Pitches x0.375 = 42.7 Pitches
Chain Length - L = 2C + N2+N1/2 +(𝑁2 − 𝑁1)2/4𝑃 2 C
Chain Length - L = 2(42.7) + 45+9/2 + (45-9)/4𝑃 2 (42.7)
Chain Length = 135.130 Pitches
Integral Number of Pitches for the Chain Length and Compute the Actual Theoretical
Center Distance
C = 1/4 [ (L-(N2+N1/2)) +( (𝐿 − 𝑁2 + 𝑁1/2)2- (8(𝑁2 − 𝑁1)2 /4𝑃 2 )1/2 )
C = 1/4 [ (135 -(45+9/2)) + ((135 − 45 + 9/2)2-8(45 − 9)2 /4𝑃2 )1/2
C = 42.6 Pitches = 42.6 pitches x (.375 in.) = 16 in.
Angle of Wrap
Small
= 180° - 2sin−1 ( 𝐷2 − 𝐷1/2𝐶 )
= 180° - 2sin−1 ( 5.37 − 1.09/32)
= 164°
Large
= 180° + sin −1( 𝐷2 − 𝐷1/2𝐶)
= 180° + 2sin −1 ( 5.37 − 1.09/32)
= 195.3°
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 34
GO-KARTING
Summary
Pitch of No. 35 Chain = 0.375 inch
Length = 135 Pitches = 135(0.375 inch) =50.62 inches
Center Distance = C = 16.0 in. (Maximum)
Sprockets = Single Strand, N0. 35, 0.375 in. Pitch
Small: 9 Teeth, D = 1.09 in.
Large: 45 Teeth, D = 5.37 in.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 35
GO-KARTING
Bearing calculation
Data: Rear Axle RPM =1120 RPM @ 5600 RPM Motor Speed
Go-Kart Speed is 50.11 MPH @ 5600 RPM Motor Speed
Rear Tires are 15” O.D. Diameter
13” Tires – Circumference = 40.841” = 3.403’ / Revolution
3.403 Feet/Revolution x 1 Mile/5280 Feet = .000645 Mile/Revolution
50.11 Miles/Hour x 1Rev/.000645 Mile = 77689.92 Rev/Hour
77689.92 Rev/Hour x 1 Hour/60 Minute = 1290 RPM
Front Axle RPM =1290 RPM @ 5600 RPM Motor Speed
Rear Bearings – 1120 RPM – Inner Race Rotating and Outer Race is Stationary
Front Bearings – 1290 RPM – Outer Race Rotating and Inner Race is Stationary
Radial Loads Front - 560 lbs.
Back - 690 lbs. Worst Case Scenario
An assumption was made for the axial loads. These loads only occur during the time the is
turning or skidding on its terrain. The highest axial loads on the bearings would occur at the
point where the Go-Kart is going at a high speed, turning while all wheels are on the ground, and
is at it’s fastest point before it overcomes the friction between the tires and its terrain. According
to the Machinery’s Handbook, the rubber can have a coefficient of friction as high as 4.0
depending what material it is riding/working on. For the go kart the following calculations were
made:
Coefficient of Friction = 2.0
Normal Force at Right Rear Tire = 153 lbs
Maximum Force on Tire Before Skidding = 306 lbs
For everyday use, normal driving and turning conditions, and various terrains, a friction factor of
2.was used and an axial load of 200 lbs. will be used for the bearing selections.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 36
GO-KARTING
Calculations
Rear Bearing Calculations
Radial Loads - 690 lbs. Bearing Calcs, Tables, and Bearing Selections were all
Axial Loads - 200 lbs. completed from our School Book.
Speed - 1120 RPM
Design Life of 2000 Hours (2 years)
Shaft Diameter - 30 mm
V = 1.0 (Inner Race Rotates) P = VXR +YT
X = .56
P = (1.0)(.56)(690 lbs.) + (1.5)(200 lbs.)
R = 690 lbs.
P = 684.4 lbs.
Y = 1.5 Assumption
T = 200 lbs.
fn= .355
fl= 1.58
C = Pfl/fn
C = (686.4)(1.58)/(.355) C = 3055 lbs.
(6206) Bearing [30 mm Shaft]
(6206) Bearing Co= 2320 lbs.
T/Co= 200 lbs./2320 lbs. = .086
e = .281
T/R = 200 lbs ./690 lbs. = .290
T/R > e
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 37
GO-KARTING
Y = 1.54
P = (1.0)(.56)(690 lbs.) + (1.54)(200 lbs.) = 694.4 lbs.
C = (694.4)(1.58)/(.355) = 3090.6 lbs.
Bearing # 6206 "C" = 3350 lbs., which is > than calculated "C". [This Bearing is acceptable)
Figure 7: Bearing Mounting
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 38
GO-KARTING
Front Bearing Calculations
Radial Loads - 560 lbs.
Bearing Calculations, Tables, and Bearing Selections
(280 lbs. per Bearing)
Axial Loads - 200 lbs.
were all completed from our School Book.
(100 lbs. per Bearing)
Speed - 1290 RPM
Design Life of 2000 Hours (2 years)
Shaft Diameter - 17 mm
The Front Wheels will use (2) Ball Bearings per Wheel.
V = 1.2 (Outer Race Rotates) P = VXR +YT
X = .56 (Table 14-5) P = (1.2)(.56)(280 lbs.) + (1.5)(100 lbs.)
R = 280 lbs.
P = 338.16 lbs.
Y = 1.5 Assumption
T = 100 lbs.
fn= .34
fl= 1.58
c=pfl/fn
C = (338.16)(1.58)/(.34) C = 1571 lbs.
(6203) Bearing [17 mm Shaft]
(6203) Bearing Co= 1010 lbs.
T/Co= 100 lbs./1010 lbs. = .099
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 39
GO-KARTING
e = .30
T/R = 100 lbs./280 lbs. = .36
T/R > e
Y = 1.45
P = (1.2)(.56)(280 lbs.) + (1.45)(100 lbs.) = 333.2 lbs.
C = (333.2)(1.58)/(.34) = 1548.2 lbs.
Bearing # 6203 "C" = 1660 lbs., which is > than calculated "C". [This Bearing is acceptable]
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 40
GO-KARTING
Steering system design
Steering system requirements
A steering system must offer sufficient precision for the driver to actually sense what is
happening at the front tyres contact patch as well as enough “feel” to sense the approach to
cornering limit of the front tyres. It must be structurally stiff to avoid components deflections.
The steering must be fast enough so that the vehicle’s response to steering and to steering
correction to happen almost instantaneous and it must also have some self returning action.
The feel, feedback and self returning action are function of the kingpin inclination, scrub radius,
castor angle and self aligning torque characteristics of the front tyre.
Design of the steering system geometry
Although modern cars do not use 100% Ackerman since it ignores important dynamic
and compliant effects, the principle is sound for low speed man oeuvres. The competition track
set up allows only for low cornering speed. In this case the tyres are at small slip angles
therefore, 100% Ackerman is the best option.
In consultation with the team, in our primary phase of the design we decided the wheelbase and
the track width. However, at the beginning of the second semester a major decision was made to
use for this year competition the previous year chassis. Since the geometry used last year proved
to work well, the decision was made to use for this year project same 100% Ackermann
geometry.
Ackermann condition
For the Ackermann analysis the Ackermann condition is used to determine the
relationship between inner and outer wheel in a turn and the radius of turn.
General equation:
1 1 𝐿
-
tan 𝜃𝑜 tan 𝜃𝑖
=𝐵
Where:
θo= turn angle of the wheel on the outside of the turn
θi= turn angle of the wheel on the inside of the turn
B= track width
L= wheel base
b= distance from rear axle to centre of mass
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 41
GO-KARTING
Figure 8: Steering mechanism
From the general equation we can calculate the turn angle of the wheel on the
Outside of the turn for a given inside wheel angle as follows:
B=900 mm
L=1550 mm
Θi=30°
1 1 𝐿
= + =16.32°
tan 𝜃𝑂 tan 𝜃𝑖 𝐵
Selection of the steering parameters
The initial decision of zero degree kingpin inclination had to be reconsidered since the 56
mm of scrub radius resulted is large and will give an excessive feedback to the driver. Therefore
4 degree kingpin inclination is to be build in the front upright design that will result in an amount
of scrub radius of 30mmcalculated for last year wheel offset. Since this amount is still grater than
10%of the thread width (Heisler 1989), new wheels with less offset have been found therefore
the resulting scrub radius is about 20 mm that is the amount we aimed for. The amount of castor
angle was set to 3.5 degree and is also build in the front Uprights. However, castor angle can be
adjusted by adjustment of the upper wishbone. This requires that one arm of the wishbone to be
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 42
GO-KARTING
shortened while lengthening the other arm by screwing in or out the adjustable spherical rodents.
Another possible adjustment is to assemble the upright in an inclined position on the hub axle but
this is not a handy method of adjustment.
Selection of the steering mechanism
From all manual steering systems the more suitable is rack and pinion steering for the
following reasons:
-has a simple construction;
- is cheap and readily available;
- has a high mechanical efficiency;
- has a reduced space requirement.
Since last year rack and pinion steering mechanism had an undesirable amount of free
play the decision was made to modify one of the two steering mechanisms sourced by the team
members as donations for the project. The rack and pinion steering box selected is from a Honda
Civic 1983 and has a5 teeth pinion gear and a pitch on the rack of 4.5mm.The steering box
assembly have been modified by Bruce Llewellyn, one of the team members. The rack has been
shortened and the assembly was kept in the original steering box. The input shaft is not in a
central position therefore the steering column will be connected to the input shaft through a
universal joint.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 43
GO-KARTING
Steering movement ratio
The rack and pinion mechanism is designed to transfer the circular input motion of the
pinion into linear output movement of the rack. It was measured that for a full travel of the rack
of 295 mm the pinion has to be rotated 3.5turns
295
Xo= =84.28
3.5
Therefore for one turn, the rack travel will be:
Considering the pinion to make one revolution then the input steering movement is
Xi=2𝜋R
Where, R = 190 mm is the radius of the steering wheel.
And the output rack movement is:
Xo=2𝜋𝑟
84.28
𝑟 = =13.42
2𝜋
Then, the movement ratio can be calculated as input movement over output:
𝑋𝑖 2𝜋𝑅 190
MR= = = =13.57
𝑋𝑜 2𝜋𝑟 14
Therefore the movement ratio is 14:1
We needed to know the movement ratio in order to determine the output load transmitted to the
tie rods for a given input load. For an effort of 20 N applied by each hand on the steering wheel
and considering no friction, the output load will be:
Fo= F1 xMR=560
Therefore the load transmitted to the tie rods is 560
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 44
GO-KARTING
CHAPTER 3
SYSTEMS USED
IN A GO – KART
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 45
GO-KARTING
Systems used in a go – kart:
Like every automobile, go-karts also have various systems. Mainly
There are 4 systems in this kart.
1. Fuel system
2. Ignition system
3. Lubrication system
4. Cooling system
1. Fuel system
The purpose of fuel system in SI engines is to store and supply fuel and then to pump to
carburetors. The fuel supply system also prepares the air-fuel mixture for combustion in the
cylinder and carries the exhaust gas to the rear of the vehicle. The basic fuel supply system
used in the vehicle consists of the following.
a) Fuel tank
b) Fuel strainer or Fuel filter
c) Air cleaner
d) Carburetor
The type of combustion that takes place in an engine is commonly called Burning.
Burning is an example of chemical change. In a chemical change as substance losses those
characteristic by which we recognize it and is changed to a new substances with different
properties. The petrol is burned in the engine and the products that result no longer resemble
petrol.
The petrol in the fuel lines differs from the petrol that is drawn into the engine. As it
passes through the carburetor and intake manifold and is mixed with aim some of the petrol is
changed from liquid to vapour. This process of vaporization is called a physical changed. No
new substance is formed since the petrol vapour is still recognized as petrol.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 46
GO-KARTING
Diesel fuel oil and petrol are both mixtures of volatile hydrocarbons compounds of
hydrogen and carbon. A compound is a substance that can be separated by chemical means into
two or more simpler substances. Hydrogen and carbon are examples of elements. In chemistry an
element is defined as a substance, which cannot be separated into simpler substances by
chemical action.
Fuel Tank: It is reservoir of fuel oil for an engine. It is kept in and elevated position so that the
fuel will flow to the carburetor through the filter by gravity. Our fuel tank has a capacity of
5litre.
Fuel Filter: Dust, particles of dirt or other unwanted particles might be present in the petrol. This
petrol should be free from these particles. Therefore, the petrol filter is used.
Air Cleaner: Since the atmospheric air is highly cornices and contains dust and dirt particles, it
is allowed to enter the engine intake manifold only through an air cleaner.
Carburetor: The mixture of petrol and air burns in the combustion chamber of the engine. The
carburetor is a device to mix the petrol with air in the proper ratio for the purpose of combustion.
The quantity of petrol and air can be indifferent ratios. The quantity of petrol can sometimes be
more and sometimes less. The speed of the engine changes according to the richness of the petrol
in the mixture.
Function of a carburetor is
a) Meter the quantity of charge to give correct air-fuel mixture.
b) Atomize petrol into fine particles so that it burns quickly.
2. Ignition system
The ignition system used for small two-stroke engine is flywheel magneto type. The
advantage of this system is that it is set combined. The flywheel magneto is basically used only
for a single cylinder engine though ones suitable for multi-cylinder engine have also been
developed. The principles of this type of ignition can be easily understood with following
description.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 47
GO-KARTING
Magneto Generator
The ignition magnet of a magneto generator, which produces alternating electrical
impulses in a low-tension armature winding or coil. At an appropriate moment the circuit
through the winding is broken by means of an interrupter, which forms an integrate part of the
magneto. A condenser connected across the breaker assures rapid cessation of the primary
current, and this results in the induction of a high tension impulse in a fine wire secondary
winding, which either surrounds the primary winding or is surrounded by it, both being wound
on a magnetic coil. Advantage of the magneto is its self-contained character. All the demands of
the system are in on compact unit from which it is necessary only to run a low-tension cable to
the lighting system and high-tension cable to the spark plug.
Fly wheel magneto (rotating magnet type)
1. Ignition Coil
2. Spark Plug
3. Ignition Switch
4. Flywheel Magnet
A small magnet is provided with laminated pole pieces and the assemblies cast in the
engine flywheel, which also acts as a cooling fan. In addition to the magnet, the magneto consists
of a coil with a w-shaped or three pole laminated core, an interrupter and a condenser, all of
these parts being mounted on a base plate or starter plate. The two curved slots in the stator plate
permit of adjusting the spark timing. As the poles of the core pass those of the magnet, the
magnetic flux passes through the coil first in one and then in the opposite direction and
alternating electric impulses is induced in it. When the flux has been well established the primary
circuit is closed and a moment later when the primary current is at its maximum, the circuit is
broken by the interrupter, which is actuated by a cam on the crankshaft. Magnetos also have a
device coupled to it so that the timing is advanced as the engine speed increases. This helps in
ignition of the charge in the cylinder. The magnetos are either fitted with build-in type of two
coils – one ignition coil and the other lighting coil or alternately they have separate ignition coil.
These are attached to a starter or fixed plate and terminate in soft-iron pole-pieces closely
matching the shape of the flywheel which rotates around them.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 48
GO-KARTING
Ignition Coil
The coil consists, in fact, of two coils which may be considered as separated electrically,
although they are both wound on the same iron core and share a common terminal. One coil,
known as the primary, is fed from the battery, and the principle of operation depends upon the
fact that, if the supply to this coil is suddenly interrupted, then the voltage is created or induced
in the other coil known as the secondary. The voltage in the two coils can be considered for our
purpose to be in the same ratio as the number of turns of wire on the two coils, so that by
providing relatively few turns on the primary winding, and a very large number on the secondary
the necessary, high voltage is obtained. The voltage required to cause a spark between the
sparking plug points depends upon both the pressure of the mixture with the cylinder and the gap
between the points under average conditions a voltage of the order of 10,000 volts is needed.
Earlier it has been stated that the development of the higher voltage in the secondary winding of
the ignition coil only occurs when the electricity supplied to the primary winding is suddenly
interrupted. This interruption is arranged to take place at the correct time by the contact breaker
points.
Figure 9: Ignition Coil
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 49
GO-KARTING
Spark Plug
An essential part of the ignition system is the provision of electrodes within the engine
cylinder, across which the ignition spark can discharge. It is desirable to arrange that these
electrodes shall be easily accessible and they are, therefore, mounted on a screwed-in plug. A
sparking plug consist essentially of a steel body which bears the earthed electrode, an insulator,
and a central rode which forms the other electrode, fed from the distributor. The lower part of the
body is threaded to suit a screwed bole provided in the engine, the length of the threaded portion
known as the reach and varying with the plug design. The body of the plug seats on to a soft steel
washer when it is screwed into the engine. The insulator operates under particularly arduous
condition since not only must it withstand the high ignition voltage, but it’s lower and is
subjected to the full bear of combustion and it is also liable to mechanical shock. At one time, the
insulator was mode from porcelain but modern plugs use ceramics based on sintered aluminum-
oxide.
The central electrode is seated into the insulator and is provided with a screwed terminal
at the upper exposed end, often shaped on connector. The tip of the electrode, at which the spark
occurs, usually has an insert of heat-resisting metal such as nickel. The ignition voltage is about
25,000 volts and the distance between the central and earthed electrodes is about. 202 inch and is
adjusted by bending the outer electrode.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 50
GO-KARTING
Figure10: Spark plug
3. Lubrication system
It is a common known that if two rough surfaces are rubbed together, there is a resistance
to the motion and heat is generated. In an IC engine surface which rubs together are not tough by
normal standards, yet if they are allowed to run in direct contact get one another, the temperature
more rise to so high a degree that local melting will occur and the surfaces will slide to seize. It
has been shown than even if the surfaces are super finished, seizing will occur unless lubrication
is provided.
The primary objective of lubrication is to reduce the friction and wear between bearing
surface. Lubrication accomplishes this requirement by interposing a film of oil between the
sliding surfaces. Other function of lubricating oil in internal combustion engines are, such as the
pistons by packing up heat and dissipating it through the crank case and reducing compression
losses by acting as a seal between the cylinder walls and piston rings.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 51
GO-KARTING
A lubricant must be able to perform certain task in order to accomplish its purpose
satisfactorily. It must possess sufficient viscosity and oiliness to protect mechanical devices of
the necessary speeds, pressures and temperatures.
Types of Lubricants:
Lubricants are classified in three forms - fluid, semisolid and solid. Fluid oils are used in
automobile engine lubrication systems, semi solid oils are used in chassis lubrication. Solid
lubrication is done by using graphite and mica. Graphite often with oil to lubricate automobile
springs. The use of these types depends upon the work required and the surface to be lubricated.
Splash Lubrication System:
The lubrication system used in the engine is splash lubrication system. In this system, oil
is splashed over different working parts of an engine. Oil is contained in a through or sump. The
big end of connecting rod is provided with a ‘spoon or dipper’ or ‘scoop’. When the piston is at
the bottom of its stroke, the big end of connecting rod and crankpin dip into oil. The dipper picks
up oil and as the crankshaft rotates, oil is splashed up due to centrifugal force.
The splashed oil is in the form of a dense mist sprayed into fine particles over surfaces in
contact. Small cups are provided close to the bearing of the crankshaft. There are small holes in
these cups. The splashed oils fill up these cups from where it is supplied to the bearing.
Oil that is splashed onto cylinder walls speeds well when piston reciprocates while the piston
rings scarp the oil and get themselves lubricated. Drops of splashed oil drip from the inner side
of the piston and lubricate the gudgeon pin and bearings. The crankshaft bearings, valve
mechanism and timing gears are also lubricated by splashed oil.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 52
GO-KARTING
Figure 11: Lubrication system
4. Cooling system:
A lot of energy is produced due to the combustion of fuel inside the engine cylinder.
Only 30% of heat energy is converted into mechanical work. Out of the remaining heat (about
70%) about 40% is carried away be exhaust gases into the atmosphere. The remaining part of
heat energy(about 30%) is absorbed by engine cylinder, cylinder head, piston and engine valves.
It causes thermal stress in the engine parts, reduces strength of the piston, decomposition of
lubrication oil, burning of valves and it also reduces the volumetric efficiency of the engine.
In order to avoid the harmful effects of overheating, it is essential to provide some cooling
system for IC Engines. Generally, there are two main types of cooling system. Water cooling and
air-cooling. In two stroke petrol engine, air-cooling system is employed.
Air cooling:
For this cylinder is cast with a number of fins around the cylinder. This type of cylinder is
used by motorcycles and scooters and also in go karts .The air from the atmosphere dashes
against these fins and remove the heat from the cylinder.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 53
GO-KARTING
Technical specifications of kinetic honda dx/zx 100 cc
Table No: 2
Engine : Two-stroke/petrol
Transmission : Automatic
Engine Displacement : 98cc
Tachometer : No
Max Power : 7.7bhp@5600rpm
Max Torque : 1.0kgm@5000rpm
Wheel base : 1,215mm
Ground Clearance : N/A
Ignition : Electronic
Dry Weight : 99kg
Battery : 12V
Transmission Constant mesh, 5 speed gear .Gear shift Pattern 1-down,4-
upStarting system Kick/self.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 54
GO-KARTING
Working of two strokepetrol engine
The engine we used in this kart is a 2-stroke petrol engine. The 2- stroke engine has no valves.
Ports serve the purpose of admitting and exhausting the charge. These parts open into the
cylinder; they are covered and opened by the sliding piston.
Figure 12: Two-Stroke Engine Components
1st Stroke: Suction and Compression: The piston compresses the fuel-air mixture in the
combustion chamber as it travels towards the TPC position.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 55
GO-KARTING
Figure 13: 1 st Stroke
In this process, the piston uncovers the inlet port. Fresh charge of fuel-air mixture enters the
crankcase owing to vacuum produced in it. This is due to the upward movement of the piston.
Thus, in one stroke of the piston, two operations, via suction and compression are carried out.
The crankshaft on the follow-through moves through one half of a revolution.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 56
GO-KARTING
Figure14:2 nd Stroke
2nd Stroke: Expansion and Exhaust:
As the piston reaches the TDC position, a spark ignites the fuel air mixture. There is
enormous pressure due to the combustion of fuel. This pressure pushes the piston downwards
executing the expansion or power stroke .In doing so, the piston uncovers the exhaust port and
allows the spent gases to go out of the cylinder to the atmosphere. The pre-compressed fuel-air
mixture travels from the crankcase to the combustion chamber through the transfer port. The
fresh fuel air mixture is fed into the combustion chamber with the help of a deflector on the
piston head. It guides the mixture through the transfer port into the combustion chamber towards
its top. The deflector also allows expulsion of exhaust gases by the fresh fuel-air mixture. This
process is known as scavenging.
We conclude that during the second stroke, two operations, viz .expansion and exhaust
are completed. The crankshaft moves through the other half of a revolution. Thus the four cycles
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 57
GO-KARTING
of operation, viz., admission, compression, expansion and exhaust are completed in one
revolution of the crankshaft. The four-stroke engine completes this cycle of operations in two
revolutions of crankshaft. It is expected from this argument that a two-stroke engine must
produce nearly double the power of a four-stroke engine of the same dimensions. The difficulties
encountered by the two stroke engines, i.e. mixing of fresh charge with exhaust gases, loss of
some fresh charge to the atmosphere and incomplete scavenging, reduces to a great extent, the
brake horse power of the engine.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 58
GO-KARTING
Types of braking systems
Records show that in 1901, a British inventor named Frederick William Lanchester
patented the first type of brake, known as the disc brake.
Since this time, there have been many braking system types created for our safety. The
brake was created to make our vehicle stop in time to avoid accidents by inhibiting the motion of
the vehicle. In most automobiles there are three basic types of brakes including; service brakes,
emergency brakes, and parking brakes. These brakes are all intended to keep everyone inside the
vehicle and traveling on our roadways safe.
If you or a member of your family has been injured in a car accident, the victim may be
entitled to receive compensation for their losses and damages including; loss of wages, medical
expenses, pain and suffering, and property damage.
Common Braking System Type
The most common types of brakes found in automobiles today are typically described as
hydraulic, frictional, pumping, electromagnetic, and servo. Of course, there are several additional
components that are involved with make braking smooth and more effective depending on road
conditions and different circumstances.
Some common types of braking systems include:
Electromagnetic Brakes
Electromagnetic brakes use an electric motor that is included in the automobile which
help the vehicle come to a stop. These types of brakes are in most hybrid vehicles and use an
electric motor to charge the batteries and regenerative brakes. On occasion, some busses will use
a secondary retarder brake which uses an internal short circuit and a generator.
Frictional Brakes
Frictional brakes are a type of service brake found in many automobiles. They are
typically found in two forms; pads and shoes. As the name implies, these brakes use friction to
stop the automobile from moving. They typically include a rotating device with a stationary pad
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 59
GO-KARTING
and a rotating weather surface. On most band brakes the shoe will constrict and rub against the
outside of the rotating drum, alternatively on a drum brake, a rotating drum with shoes will
expand and rub against the inside of the drum.
Pumping Brakes
Pumping brakes are used when a pump is included in part of the vehicle. These types of
brakes use an internal combustion piston motor to shut off the fuel supply, in turn causing
internal pumping losses to the engine, which causes braking.
Hydraulic Brakes
Hydraulic brakes are composed of a master cylinder that is fed by a reservoir of hydraulic
braking fluid. This is connected by an assortment of metal pipes and rubber fittings which are
attached to the cylinders of the wheels. The wheels contain two opposite pistons which are
located on the band or drum brakes which pressure to push the pistons apart forcing the brake
pads into the cylinders, thus causing the wheel to stop moving.
Servo Brakes
Servo brakes are found on most cars and are intended to augment the amount of pressure
the driver applies to the brake pedal. These brakes use a vacuum in the inlet manifold to
generate extra pressure needed to create braking. Additionally, these braking systems are only
effective while the engine is still running.
In some vehicles we may find that there are more than one of these braking systems
included. These systems can be used in unison to create a more reliable and stronger braking
system. Unfortunately, on occasion, these braking systems may fail resulting in automobile
accidents and injuries.
Parking and Emergency Braking Systems
Parking and emergency braking systems use levers and cables where a person must use
mechanical force or a button in newer vehicles, to stop the vehicle in the case of emergency or
parking on a hill. These braking systems both bypass normal braking systems in the event that
the regular braking system malfunctions.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 60
GO-KARTING
These systems begin when the brake is applied, which pulls a cable that passes to the
intermediate lever which causes that force to increase and pass to the equalizer. This equalizer
splits into two cables, dividing the force and sending it to both rear wheels to slow and stop the
automobile.
In many automobiles, these braking systems will bypass other braking systems by
running directly to the brake shoes. This is beneficial in the case that your typical braking system
fails.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 61
GO-KARTING
Transmission
Karts do not have a differential lack of a differential means that one rear tire must slide
while cornering; this is achieved by designing the chassis so that the inside rear tire lifts up
slightly when the kart turns the corner. This allows the tire to lose some of its grip and slide or
lift off the ground completely.
Power is transmitted from the engine to the rear axle by way of a chain. Both engine and
axle sprockets are removable, their ratio has to be adapted according to track configuration in
order to get the most of the engine.
In the early days, karts were direct drive only, but the inconvenience of that setup soon
led to the centrifugal clutch for the club level classes. Dry centrifugal clutches are now used in
many categories (Rotax Max is one example) and have become the norm as the top international
classes have switched to 125 cc clutched engines as of January 2007.
Transmission system
The mechanical power produced by prime mover is used to drive various machines in the
workshop and factories. A transmission system is the mechanism, which deals with transmission
of the power. And motion from prime mover to shaft or from one shaft to the other. The machine
tool drive is an aggregate of mechanism that transmits motion from an external source. To the
operative elements of the machine tool. Provide an appropriate working or auxiliary motion.
When The required motion is rotary ; the transmission takes place through mechanisms that
transfer Rotary motion from one shaft to another. Transmission of the motion from the external
source to the operative element can take place through Mechanical elements such as belts, gears,
chains etc.
Mechanical Transmission and its elements:-
1) Belt Transmission
2) Gear transmission
3) Chain Transmission
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 62
GO-KARTING
Belt Transmission
Belt drive is one of the most common effective devices of transmitting motion and power
from one shaft to the other by means of a thin inextensible belt running over two pulleys. This
largely used for general purpose in mills and factories especially when the distance between the
Shafts is not very great. When the center distance between the two shafts is large than the tight
side of the belt should be the Lower one the pulley called drive is mounted on the driving shaft
while the other, which is mounted. On the shaft to which power is to be transmitted is called the
driven pulley or follower. When the Belt moves over the Pulleys there is always the possibility
of slipping between the belt and pulley. And hens the character of the motion transmitted is not
positive when positive action is required. Gears and chains must be used.
Gear Transmission:
Efficiency of power transmission in belt and rope drives is less. The power may be
transmitted from one shaft another by means of mating gears with high transmission Efficiency
and a gear drive is also provided when the between driver and follower is very small.
Chain Transmission:
Chains are used for high transmission number. They are mostly used when Distance
between center is short but the center distance is as much as 8 m. They are now generally used.
Used for transmission of power in cycle, motor vehicle, and agriculture machinery gearing in
two workshops. It is general requirement for any machines that they should provision for
regulating the speed of travel .The regulation may be available in discrete steps or it may be
steeples i.e. continuous the format are known as stepped drives Ex. Lathe machine, milling
machine, printing machine etc.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 63
GO-KARTING
CHAPTER 4
WORKING OF
AUTOMATIC
TRANSMISSION
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 64
GO-KARTING
This go-kart has no gears and clutches. The transmission we use is not manual, its
automatic. For this purpose, we use continuously variable transmission. We use pulley and belt
system type CVT. This type of CVT uses pulleys, typically connected by a metal levered rubber
belt. A chain may also be used. A large pulley connected to a smaller pulley with a belt on chain
will operate in the same manner as a large gear meshing with a small gear. Typical CVTs have
pulleys formed as pairs of opposing cones. Moving the cones in and out has the effect of
changing the pulley diameter, since the belt or chain must take a large diameter path when the
conical pulleys halves are close together. This motion of the cones can be computer controlled
and driven for example, by a servomotor. However in the light weight VDP transmissions used
in automatic motor scooters and light motor cycles, the change in pulley diameter is
accomplished by a variation, an all mechanical system that uses weights and springs to change
the pulley diameters as a function of belt speed.
Figure 15: Automatic transmission
The variable-diameter pulleys are the heart of a CVT. Each pulley is made of two 20-
degree cones facing each other. A belt rides in the groove between the two cones. V-belts are
preferred if the belt is made of rubber. V-belts get their name from the fact that the belts bear the
V shaped cross-section, which increases the frictional grip of the belt. When the two cones of the
pulley are far apart (when the diameter increases) the belt rides lower in the groove, and the
radius of the belt rides lower in the groove, and the radius of the belt loop going around the
pulley get smaller. When the cones are close together (when the diameter decreases) the belt
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 65
GO-KARTING
rides tighter in the groove, and the radius of the belt loop going around the pulley gets larger.
CVTs may use hydraulic pressure, centrifuged force or spring tension to create the force
necessary to adjust the pulley halves. Variable-diameter pulleys must always come in pairs.
Figure 16: Automatic transmission with high gear
One of the pulleys, known as the drive pulley (or driving pulley), is connected to the
crankshaft of the engine. The driving pulley is also called the input pulley because it is where the
energy from the engine enters the transmission. The second pulley is called the driven pulley
because the first pulley is turning it. As an output pulley, the driven pulley transfers energy to
drive shaft. The distance between the centers of the pulleys to where the belt makes contact in
the groove is known as the pitch radius. When the pulleys are far apart, the belt rides lower and
the pitch radius decreases. When the pulleys are close together, the belt rides higher and the pitch
radius increases.
The ratio of the pitch radius on the driving pulley to the pitch radius on the driven pulley
determines the year. When one pulley increases its radius, the other decreases its radius to keep
the belt light as the two pulleys change their radii relative to one another, they create an infinite
number of gear ratios-from low to high and everything in between. For example, when the pitch
radius is small on the driving pulley and large on the driven pulley, then the rotational speed of
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 66
GO-KARTING
the driven pulley decreases resulting in a lower ‘gear’. When the pitch radius is large on the
driving pulley and small on the driven pulley, then the rotational speed of the driven pulley
increases resulting in a higher ‘gear’. Thus in theory, a CVT has an infinite number of ‘gears’
that it can run through at any time, at any engine or vehicle speed.
Figure 17: Automatic transmission with low gear
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 67
GO-KARTING
Karting as a learning tool
Kart racing is usually used as a low-cost and relatively safe way to introduce drivers to
motor racing. Many people associate it with young drivers but adults are also very active in
karting. Karting is considered the first step in any serious racer's career. It can prepare the driver
for high-speed wheel-to-wheel racing by helping develop quick reflexes, precision car control,
and decision-making skills. In addition, it brings an awareness of the various parameters that can
be altered to try to improve the competitiveness of the kart (examples being tire pressure,
gearing, seat position, chassis stiffness) that also exist in other forms of motor racing. All current
as well as many former Formula One racers grew up racing karts, most(8) prominent among
them Michael Schumacher, Ayton Sienna, Alain Prost, Fernando Alonso, KimiRäikkönen and
Lewis Hamilton. Many NASCAR drivers also got their start in racing from karts, such as Darrell
Walt rip, Lake Speed, Ricky Rudd, Juan Pablo Montoya, Tony Stewart, and Jeff Gordon
Kart racing or karting
It is a variant of wheel motor with simple, small four-wheeled vehicles called karts, go-
karts, or gearbox/shifter karts depending on the design. They are usually raced on scaled-down
circuits. Karting is commonly perceived as the stepping stone to the higher and more expensive
ranks of motorsports.
Karts vary widely in speed and some (known as Super karts) can reach speeds exceeding
160 mph (250 km/h), while go-karts intended for the general public in amusement parks may be
limited to speeds of no more than 15 mph (25 km/h). A KF1 kart, with a 125 cc 2-stroke engine
and an overall weight including the driver of 150 kilograms has a top speed of 85 mph (140
km/h). It takes a little more than 3 seconds to go from 0 to 60 mph with a 125 cc shifter kart (6
gears), with a top speed of 115 mph (185 km/h) on long circuits.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 68
GO-KARTING
CHAPTER 5
STEERING MECHANISM
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 69
GO-KARTING
Introduction
Primary function of the steering system is to achieve angular motion of the front wheels
to negotiate a turn. This is done through linkage and steering gear which convert the rotary
motion of the steering wheel into angular motion of the front road wheels. Secondary functions
of steering system are:
1. To provide directional stability of the vehicle when going straight ahead.
2. To provide perfect steering condition, i.e.; perfect rolling motion of the road
wheels at all times.
3. To facilitate straight ahead recovery after completing a turn.
4. To minimize tyre wear.
Requirement of a good steering system are:
1. The steering mechanism should be very accurate and easy to handle.
2. The effort required to steer should be minimal and must not be tiresome to
the drive.
3. The steering mechanism should also provide directional stability. This
implies that the vehicle should have a tendency to return to its straight ahead
position after turning
Wheel alignment:
a. Positioning of the steered wheels to achieve the following is termed wheel
alignment:
1. Directional stability during straight ahead position.
2. Perfect rolling condition on steering.
3. Recovery after completing the turn.
b. There different types of alignment can be:
1. The front-end alignment.
2. Thrust angle alignment.
3. Four-wheel alignment.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 70
GO-KARTING
Procedure to Wheel alignment
1. First straight the front wheels by adjusting steering wheel.
2. Then lock the steering wheel.
3. Loosen the tie rod nuts of the both side by using wrench.
4. Adjust the tie rods until the wheels vertically straight.
5. Then tighten the nuts.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 71
GO-KARTING
Basic steering components
99% of the world's car steering systems are made up of the same three or four
components. The steering wheel, which connects to the steering system, which connects to the
track rod, which connects to the tie rods, which connect to the steering arms. The steering system
can be one of several designs, which we'll go into further down the page, but all the designs
essentially move the track rod left-to-right across the car. The tie rods connect to the ends of the
track rod with ball and socket joints, and then to the ends of the steering arms, also with ball and
socket joints. The purpose of the tie rods is to allow suspension movement as well as an element
of adjustability in the steering geometry. The tie rod lengths can normally be changed to achieve
these different geometries.
Figure 18: Steering mechanism
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 72
GO-KARTING
The Ackermann Angle: your wheels don't point the same direction.
In the simplest form of steering, both the front wheels always point in the same direction.
You turn the wheel, they both point the same way and around the corner you go. Except that by
doing this, you end up with tyres scrubbing, loss of grip and a vehicle that 'crabs' around the
corner. So why is this? Well, it's the same thing you need to take into consideration when
looking at transmissions. When a car goes around a corner, the outside wheels travel further than
the inside wheels. In the case of a transmission, it's why you need a differential (see the
Transmission Bible), but in the case of steering, it's why you need the front wheels to actually
point in different directions. This is the diagram from the Transmission Bible. You can see the
inside wheels travel around a circle with a smaller radius (r2) than the outside wheels (r1):
Figure 19: Angle of tyre
In order for that to happen without causing undue stress to the front wheels and tyres,
they must point at slightly different angles to the centerline of the car. The following diagram
shows the same thing only zoomed in to show the relative angles of the tyres to the car. It's all to
do with the geometry of circles:
This difference of angle is achieved with a relatively simple arrangement of steering
components to create a trapezoid geometry (a parallelogram with one of the parallel sides shorter
than the other). Once this is achieved, the wheels point at different angles as the steering
geometry is moved. Most vehicles now don't use 'pure' Ackermann steering geometry because it
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 73
GO-KARTING
doesn't take some of the dynamic and compliant effects of steering and suspension into account,
but some derivative of this is used in almost all steering systems:
Figure 20: Steering geometry
Why 'Ackermann'?
This particular technology was first introduced in 1758 by Erasmus Darwin, father of
Charles Darwin, in a paper entitled "Erasmus Darwin's improved design for steering carriages--
and cars". It was never patented though until 1817 when Rudolph Ackermann patented it in
London, and that's the name that stuck.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 74
GO-KARTING
Steering ratio
Every vehicle has a steering ratio inherent in the design. If it didn't you'd never be able to
turn the wheels. Steering ratio gives mechanical advantage to the steering, allowing you to turn
the tyres with the weight of the whole car sitting on them, but more importantly, it means you
don't have to turn the steering wheel a ridiculous number of times to get the wheels to move.
Steering ratio is the ratio of the number of degrees turned at the steering wheel vs. the number of
degrees the front wheels are deflected. So for example, if you turn the steering wheel 20° and the
front wheels only turn 1° that gives a steering ratio of 20:1. For most modern cars, the steering
ratio is between 12:1 and 20:1. This coupled with the maximum angle of deflection of the wheels
gives the lock-to-lock turns for the steering wheel. For example, if a car has a steering ratio of
18:1 and the front wheels have a maximum deflection of 25°, then at 25°, the steering wheel has
turned 25°x18, which is 450°. That's only to one side, so the entire steering goes from -25° to
plus 25° giving a lock-to-lock angle at the steering wheel of 900°, or 2.5 turns (900° / 360).
This works the other way around too of course. If you know the lock-to-lock turns and the
steering ratio, you can figure out the wheel deflection. For example if a car is advertised as
having a 16:1 steering ratio and 3 turns lock-to-lock, then the steering wheel can turn 1.5x360°
(540°) each way. At a ratio of 16:1 that means the front wheels deflect by 33.75° each way.
For racing cars, the steering ratio is normally much smaller than for passenger cars - i.e. closer to
1:1 - as the racing steering need to get fuller deflection into the steering as quickly as possible.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 75
GO-KARTING
Turning circles
The turning circle of a car is the diameter of the circle described by the outside wheels
when turning on full lock. There is no hard and fast formula to calculate the turning circle :
turning circle radius = (track/2) + (wheelbase/sin (average steer angle))
The numbers required to calculate the turning circle explain why a classic black London taxi has
a tiny 8m turning circle to allow it to do U-turns in the narrow London streets. In this case, the
wheelbase and track aren't radically different to any other car, but the average steering angle is
huge. For comparison, a typical passenger car turning circle is normally between 11m and 13m
with SUV turning circles going out as much as 15m to 17m.
Steering system by pitman arm system:
There really are only two basic categories of steering system today; those that have
pitman arms with a steering 'box' and those that don't. Older cars and some current trucks use
pitman arms, so for the sake of completeness, I've documented some common types. Newer cars
and unit body light-duty trucks typically all use some derivative of rack and pinion steering.
Pitman arm mechanisms have a steering 'box' where the shaft from the steering wheel
comes in and a lever arm comes out - the pitman arm. This pitman arm is linked to the track rod
or centre link, which is supported by idler arms. The tie rods connect to the track rod. There are a
large number of variations of the actual mechanical linkage from direct-link where the pitman
arm is connected directly to the track rod, to compound linkages where it is connected to one end
of the steering system or the track rod via other rods. The example below shows a compound
link.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 76
GO-KARTING
Figure 21: Pitman arm Steering mechanism
Most of the steering box mechanisms that steering the pitman arm have a 'dead spot' in
the centre of the steering where you can turn the steering wheel a slight amount before the front
wheels start to turn. This slack can normally be adjusted with a screw mechanism but it can't
ever be eliminated. The traditional advantage of these systems is that they give bigger
mechanical advantage and thus work well on heavier vehicles. With the advent of power
steering, that has become a moot point and the steering system design is now more to do with
mechanical design, price and weight. The following are the four basic types of steering box used
in pitman arm systems.
Worm and sector
In this type of steering box, the end of the shaft from the steering wheel has a worm gear
attached to it. It meshes directly with a sector gear (so called because it's a section of a full gear
wheel). When the steering wheel is turned, the shaft turns the worm gear, and the sector gear
pivots around its axis as its teeth are moved along the worm gear. The sector gear is mounted on
the cross shaft which passes through the steering box and out the bottom where it is splined, and
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 77
GO-KARTING
the pitman arm is attached to the splines. When the sector gear turns, it turns the cross shaft,
which turns the pitman arm, giving the output motion that is fed into the mechanical linkage on
the track rod. The following diagram shows the active components that are present inside the
worm and sector steering box. The box itself is sealed and filled with grease.
Figure 22: Worm and sector
Worm and roller
The worm and roller steering box is similar in design to the worm and sector box. The
difference here is that instead of having a sector gear that meshes with the worm gear, there is a
roller instead. The roller is mounted on a roller bearing shaft and is held captive on the end of the
cross shaft. As the worm gear turns, the roller is forced to move along it but because it is held
captive on the cross shaft, it twists the cross shaft. Typically in these designs, the worm gear is
actually an hourglass shape so that it is wider at the ends. Without the hourglass shape, the roller
might disengage from it at the extents of its travel.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 78
GO-KARTING
Figure 23: Worm and roller
Worm and nut or recirculating ball
This is by far the most common type of steering box for pitman arm systems. In a
recirculating ball steering box, the worm steering has many more turns on it with a finer pitch. A
box or nut is clamped over the worm steering that contains dozens of ball bearings. These loop
around the worm steering and then out into a recirculating channel within the nut where they are
fed back into the worm steering again. Hence recirculating. As the steering wheel is turned, the
worm steering turns and forces the ball bearings to press against the channel inside the nut. This
forces the nut to move along the worm steering. The nut itself has a couple of gear teeth cast into
the outside of it and these mesh with the teeth on a sector gear which is attached to the cross
shaft just like in the worm and sector mechanism. This system has much less free play or slack in
it than the other designs, hence why it's used the most. The example below shows a recirculating
ball mechanism with the nut shown in cutaway so you can see the ball bearings and the
recirculation channel.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 79
GO-KARTING
Figure 24: Worm and recirculating ball
Cam and lever
Cam and lever steering boxes are very similar to worm and sector steering boxes. The
worm steering is known as a cam and has a much shallower pitch and the sector gear is replaced
with two studs that sit in the cam channels. As the worm gear is turned, the studs slide along the
cam channels which forces the cross shaft to rotate, turning the pitman arm. One of the design
features of this style is that it turns the cross shaft 90° to the normal so it exits through the side of
the steering box instead of the bottom. This can result in a very compact design when necessary.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 80
GO-KARTING
Figure 25: Cam and lever
Steering system by rack &pinion:
This is by far the most common type of steering you'll find in any car today due to it's
relative simplicity and low cost. Rack and pinion systems give a much better feel for the steering,
and there isn't the slop or slack associated with steering box pitman arm type systems. The
downside is that unlike those systems, rack and pinion designs have no adjustability in them, so
once they wear beyond a certain mechanical tolerance, they need replacing completely. This is
rare though.
In a rack and pinion system, the track rod is replaced with the steering rack which is a long,
toothed bar with the tie rods attached to each end. On the end of the steering shaft there is a
simple pinion gear that meshes with the rack. When you turn the steering wheel, the pinion gear
turns, and moves the rack from left to right. Changing the size of the pinion gear alters the
steering ratio. It really is that simple. The diagram below shows an example rack and pinion
system as well as a close-up cutaway of the steering rack itself.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 81
GO-KARTING
Figure 26: Rack and Pinion
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 82
GO-KARTING
Variable-ratio rack and pinion steering
This is a simple variation on the above design. All the components are the same, and it all
works the same except that the spacing of the teeth on the rack varies depending on how close to
the centre of the rack they are. In the middle, the teeth are spaced close together to give slight
steering for the first part of the turn - good for not over steering at speed. As the teeth get further
away from the centre, they increase in spacing slightly so that the wheels turn more for the same
turn of the steering wheel towards full lock.
Generally speaking, when you turn the steering wheel in your car, you typically expect it to go
where you're pointing it. At slow speed, this will almost always be the case but once you get
some momentum behind you, you are at the mercy of the chassis and suspension designers. In
racing, the aerodynamic wings, air splitters and under trays help to maintain an even balance of
the vehicle in corners along with the position of the weight in the vehicle and the suspension
setup. The two most common problems you'll run into are under steer and over steer.
Under steer
Under steer is so called because the car steers less than you want it to. Under steer can be
brought on by all manner of chassis, suspension and speed issues but essentially it means that the
car is losing grip on the front wheels. Typically it happens as you brake and the weight is
transferred to the front of the car. At this point the mechanical grip of the front tyres can simply
be overpowered and they start to lose grip (for example on a wet or greasy road surface). The
end result is that the car will start to take the corner very wide. In racing, that normally involves
going off the outside of the corner into a catch area or on to the grass. In normal you-and-me
driving, it means crashing at the outside of the corner. Getting out of under steer can involve
letting off the throttle in front-wheel-steering vehicles (to try to give the tyres chance to grip) or
getting on the throttle in rear-wheel-steering vehicles (to try to bring the back end around). It's a
complex topic more suited to racing driving forums but suffice to say that if you're trying to get
out of under steer and you cock it up, you get.....
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 83
GO-KARTING
Figure 27: Under steer
Over steer
The bright ones amongst you will probably already have guessed that over steer is the
opposite of under steer. With over steer, the car goes where it's pointed far too efficiently and
you end up diving into the corner much more quickly than you had expected. Over steer is
brought on by the car losing grip on the rear wheels as the weight is transferred off them under
braking, resulting in the rear kicking out in the corner. Without counter-steering (see below) the
end result in racing is that the car will spin and end up going off the inside of the corner
backwards. In normal you-and-me driving, it means spinning the car and ending up pointing
back the way you came.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 84
GO-KARTING
Figure 28: Over steer
Counter-steering
Counter-steering is what you need to do when you start to experience over steer. If you
get into a situation where the back end of the car loses grip and starts to swing out, steering
opposite to the direction of the corner can often 'catch' the over steer by directing the nose of the
car out of the corner. In drift racing and demonstration driving, it's how the stirrings are able to
smoke the rear tyres and power-slide around a corner. They will use a combination of throttle,
weight transfer and handbrake to induce over steer into a corner, then flick the steering the
opposite direction, honk on the accelerator and try to hold a slide all the way around the corner.
It's also a widely-used technique in rally racing. Tiff Need ell - a racing steering who also works
on some UK motoring programs - is an absolute master at counter-steer power sliding.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 85
GO-KARTING
Figure 29: Counter steer
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 86
GO-KARTING
Mechanical steerings
the different types of mechanical steerings used in modern cars are :
rack and pinion steering
recirculating ball bearing
manual worm and sector steering
worm and tapered peg steering
manual worm and roller steering
worm and wheel steering
worm and nut steering
Rack and pinion steering
Rack-and-pinion steering is quickly becoming the most common type of steering on cars,
small trucks and SUVs. It is actually a pretty simple mechanism. A rack-and-pinion gear set is
enclosed in a metal tube, with each end of the rack protruding from the tube. A rod, called a tie
rod, connects to each end of the rack.The pinion gear is attached to the steering shaft. When you
turn the steering wheel, the gear spins, moving the rack. The tie rod at each end of the rack
connects to the steering arm on the spindle.
Figure 30: Working of Rack and pinion
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 87
GO-KARTING
The rack-and-pinion gear set does two things:
It converts the rotational motion of the steering wheel into the linear motion needed to turn the
wheels. It provides a gear reduction, making it easier to turn the wheels. On most cars, it takes
three to four complete revolutions of the steering wheel to make the wheels turn from lock to
lock (from far left to far right). Some cars have variable-ratio steering, which uses a rack-and-
pinion gear set that has a different tooth pitch (number of teeth per inch) in the center than it has
on the outside. This makes the car respond quickly when starting a turn (the rack is near the
center), and also reduces effort near the wheels turning limits.
Recirculating ball steering
Recirculating-ball steering is used on many trucks and SUVs (sport utility vehicle) today.
The linkage that turns the wheels is slightly different than on a rack and pinion system. The
recirculating ball steering gear contains a worm gear. You can imagine the gear in two parts. The
first part is a block of metal with a threaded hole in it.
Figure 31: Recirculating ball steering
This block has gear teeth cut into the outside of it, which engage a gear that moves the pitman
arm. The steering wheel connects to a threaded rod, similar to a bolt that sticks into the hole in
the block. When the steering wheel turns, it turns the bolt. Instead of twisting further into the
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 88
GO-KARTING
block the way a regular bolt would, this bolt is held fixed so that when it spins, it moves the
block, which moves the gear that turns the wheels.
Instead of the bolt directly engaging the threads in the block, all of the threads are filled
with ball bearings that recirculate through the gear as it turns. The balls actually serve two
purposes: First, they reduce friction and wear in the gear; second, they reduce slop in the gear.
Slop would be felt when you change the direction of the steering wheel -- without the balls in the
steering gear, the teeth would come out of contact with each other for a moment, making the
steering wheel feel loose.
Manual worm and sector steering
The manual worm and sector steering gear assembly uses a steering shaft with a three-
turn worm gear supported and straddled by ball bearing assemblies. The worm meshes with a 14-
tooth sector attached to the top end of the pitman arm shaft. In operation, a turn of the steering
wheel causes the worm gear to rotate the sector and the pitman arm shaft. This movement is
transmitted to the pitman arm and throughout the steering train to the wheel spindles.
worm and tapered peg steering
The manual worm and tapered peg steering gear has a three-turn worm gear at the lower
end of the steering shaft supported by ball bearing assemblies. The pitman shaft has a lever end
with a tapered peg that rides in the worm grooves. When the movement of the steering wheel
revolves the worm gear, it causes the tapered peg to follow the worm gear grooves. Movement of
the peg moves the lever on the pitman shaft, which in turn moves the pitman arm and the
steering linkage.
manual worm and roller steering
Various manufacturers use the manual worm and roller steering gear. This steering gear
has a three-turn worm gear at the lower end of the steering shaft. Instead of a sector or tapered
peg on the pitman arm shaft, the gearbox has a roller assembly (usually with two roller teeth) that
engages the worm gear. The assembly is mounted on anti-frictional bearings. When the roller
teeth follow the worm, the rotary motion is transmitted to the pitman arm shaft, pitman arm and
into the steering linkage.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 89
GO-KARTING
worm and wheel steering gear
The movement of the steering wheel turns the worm, which in turn steering the worm
wheel. Attached to the wheel spindle rigidly is drop arm, so that a rotation of steering wheel
corresponds to a linear motion of the drop arm end, which is connected to the link rod as has
already been discussed. In place of worm wheel, only a sector is also sometimes used, but the
complete wheel has an advantage over the later in that in this case backlash due wearing of the
tooth of the worm and worm wheel can be easily adjusted. For this purpose the worm wheel is
mounted over an eccentric bush. When the teeth worn out problem is how to bring the worm and
the wheel together to take up the wear. This is done by rotating the bush through a certain angle.
Worm and nut steering gear
Here the steering wheel rotation rotates the worm, which in turn moves the nut along its
length. This cause the drop arm ends to move linearly, further moving the link rod and thus
steering the wheel.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 90
GO-KARTING
Power steering
power rack and pinion steering
power recirculating ball bearing steering
hydraulic power steering
electro hydraulic power steering
electric power steering
active steering
steer by wire
Power rack and pinion
When the rack-and-pinion is in a power-steering system, the rack has a slightly different
design.
Figure 32: Power rack and pinion steering
Part of the rack contains a cylinder with a piston in the middle. The piston is connected to the
rack. There are two fluid ports, one on either side of the piston.
Supplying higher-pressure fluid to one side of the piston forces the piston to move, which in turn
moves the rack, providing the power assist.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 91
GO-KARTING
Power recirculating ball bearing system
Power steering in a recirculating-ball system works similarly to a rack-and-pinion system.
Supplying higher-pressure fluid (fluid is always a oil) to one side of the block provides assist.
Hydraulic power steering system
The hydraulic power steering system today is the most used steering system. It is based
on the components of the mechanical steering system, in addition there is a hydraulic system,
usually consisting of hydro pump with V-belt steering, hydraulic lines, oil reservoir and steering
valve. The essential new function of this power steering is the hydraulic support of the steering
movement, so that the steeringr’s steering-wheel effort is reduced.
Figure 33: Hydraulic power steering
Therefore in the event of failure, the loss of steering boost arises as a new safety aspect in
comparison to purely manual steering. This can be caused by a leakage of the hydraulic system
or by a hydro pump failure. Since by design the manual steering system is further available, in
case of a failure the steering function is further available and the steering can adapt himself by
the usually slowly rising steering-wheel effort in good time to the missing steering boost.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 92
GO-KARTING
Electro-hydraulic power steering system
The electro-hydraulic power steering system is based on the rack-and-pinion hydraulic
power steering and its essential new feature is an electrically steering hydraulic pump, which
substitutes the steering pump steering so far by the vehicle engine. Additional new components
compared to the hydraulic power steering are: Electric motor, electronic control unit and an
optional sensor for steering velocity. The pressure supply unit integrates electric motor and
electronic as well as hydraulic pump and oil reservoir. The decoupling of the pump steering from
the vehicle.
Engine allows a free selection of the installation location in the vehicle and in the
consequence the delivery of a fully functional and checked axle steering module by the steering
system manufacturer. The electronically controlled electric steering results in an
Energy saving up to 75% depending on load distribution and control strategy.
Additionally a variable steering boost is possible functionally depending on steering- and
vehicle- velocity and other parameters.
As to safety the electro-hydraulic and the hydraulic power steering have the same failure
effect: Failures of new additional components only affect steering boost, and the mechanical
rack-and-pinion steering is still available. Omission of the V-belt steering, by which the steering
pump has been operated so far, improves the steering boost reliability even further.
Electric power steering system
The electric power steering system combines a mechanical steering system with an
electronically controlled electric motor to a dry power steering. The hydraulic system, which so
far delivered the steering boost, is substituted by an electrical system. For this, a torque sensor
measures the steering wheel torque and an electronic control unit calculates the necessary servo
torque. This is delivered by an electric motor in such a way that the desired torque curve at the
steering wheel is created.
Depending on the necessary steering forces the electric motor engages by a worm gear at the
steering column or at the pinion and for high forces directly at the rack by a ball-and-nut gear.the
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 93
GO-KARTING
pinion-solution is represented, which is intended for middle class vehicles. The components
involved in the electrical power steering are besides the mechanical steering components
Electric motor,
Electronic control unit,
Power electronics,
Steering wheel torque sensor and
CAN data bus to other systems
The electrical power steering system offers large benefits compared to the hydraulic
power steering. Apart from about 80% lower energy consumption the omission of the hydraulic
fluid increases the environmental compatibility. The electrical power steering is delivered to the
car manufacturer as a complete system module ready-to install. The adaptations of the servo
power assistance to certain vehicle types as well as the modification of the control strategy
dependent on different parameters and vehicle sizes are easily and rapidly feasible.
From the safety point of view as with the other power steering systems due to failures in
electrical components, again the steering boost can be impaired, here by faults of components of
the electrical servo system. The steering system’s unintentional self activity as well as too strong
steering boosts is to be concerned as new potential safety critical effects, which must be avoided
by appropriate countermeasures.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 94
GO-KARTING
Functional description of electrical steering systems
Figure 34: Electrical steering system
In an electrical power steering system the steering torque initiated by the steering is
measured by a steering wheel torque sensor and is fed into an electronic control unit. The later
then calculates along with the driving speed a reference torque for the steering motor, which,
however, can optionally also depend on the steering angle and steering angle velocity. By means
of the calculated reference torque the currents of the steering motor are actuated. Figure 8 shows
the pinion-type realization; where at the pinion the electrical torque is superimposed to the torque
initiated by the steering. In further versions both torques can be superimposed either on the
steering column or on the rack. In case of a failing electrical component of this steering system
the non-boosted mechanical intervention by the steering is maintained.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 95
GO-KARTING
Safety features
Detecting and evaluating all electrical failures accomplish the system’s fail-safe behavior
concerning electrical faults. In case of major electrical faults the electrical power steering system
is switched off.
Sensor failures or failures in the electronic control unit might be considered as an
example, resulting in an unintentional self-activity of the steering or in a too strong steering
boost. Risks of that kind are avoided by an effective monitoring strategy where failures are
detected on time and the power steering system is switched-off. One detection method for this
constitutes checking sensor signals and motor currents for plausible system conditions on a
second path.
BMW Active Steering
BMW's Active Steering, a true breakthrough in steering technology, supports the steering
at all speeds, particularly in the lower and medium speed range where dynamic steering offers a
genuine increase in driving pleasure.
In a situation like where one quality is of particular significance: the correct steering
response this car must meet a wide range of different requirements. At medium speeds, for
example, the front wheels must respond as directly as possible to the steeringr's commands. With
increasing road speeds on the other hand, the steering transmission should become less direct.
The demands made on the steering system therefore vary most significantly from case to case,
with the overriding requirement that the steering always receives authentic feedback from the
steering system itself.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 96
GO-KARTING
Figure 35: Active steering system
On a conventional steering system the steeringr's steering commands are always
conveyed the same way due to the strictly defined transmission ratio between the steering wheel
and the front wheels of the car (even if the transmission becomes more progressive with
increasing wheel lock). Direct steering that would be ideal at low speeds remains direct, although
a much more indirect steering transmission ratio would be appropriate at high speeds in order to
compensate for the physically induced increase in steering sensitivity as a function of higher
speeds on the road. Conversely, the same also applies to indirect steering: The ideal steering
transmission ratio at high speeds makes the process of steering hard work at lower speeds,
requiring the steering to turn the steering wheel much more and with much higher forces than
necessary related to the position of the wheels on the road.
BMW's innovative Active Steering now revolutionizes the entire steering process by
overriding this seemingly insoluble conflict of interests, varying the steering angle of the front
wheels specifically according to the steering’s requirements. In this process, Active Steering
combines the advantages of all electronic steer-by-wires steering without any mechanical link
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 97
GO-KARTING
between the steering wheel and the front wheels (purely electronic transmission of signals) with
the authentic steering feedback that only a mechanical steering system is currently able to
provide. Accordingly, Active Steering sets a new standard in agility, comfort and safety on the
road.
In technical terms the various functions and benefits offered by Active Steering are based
on the principle of overlapping steering angles: An electromechanical adjuster between the
steering wheel and the steering gearbox adds an additional steering angle to the angle
predetermined by the steering. The core element of BMW's revolutionary Active Steering is
therefore the override steering effect provided by the planetary gearing with two incoming and
one outgoing shaft integrated in the split steering column. One incoming shaft is connected with
the steering wheel; the second is steering by an electric motor via a self-inhibiting gear wheel
transmission and thus serving to reduce the transmission ratio. The overall steering angle finally
coming out on the outgoing shaft is made up of the angle determined by the steering on the
steering wheel and the angle determined by the electric motor. Steering forces when turning the
wheels, however, are not determined by the electric motor, but rather by conventional power
steering assistance. Additional components of Active Steering are the separate control unit and
various sensors for determining both current driving conditions and the steeringr's commands.
And last but not least, Active Steering communicates directly with the DSC control unit through
the car's on-board communication network.
Depending on driving conditions, Active Steering either increases or reduces the steering
angle on the front wheels. At low speeds the actuator follows the steeringr's steering commands,
increasing wheel lock at the front and reducing the effort required in steering. On the road this
means a far more direct steering transmission ratio than with conventional cars up to a medium
speed level, steering forces remaining comfortably low as with BMW's well-known Servotronic.
At high speeds the actuator operates by reducing the steering angle. This reduces the
steering lock on the front wheels and makes the steering transmission ratio more indirect, thus
providing the high standard of a conventional BMW steering on fast stretches of the Autobahn.
Steering forces are increased in the process in order to prevent any undesired movement of the
steering-wheel.In critical situations on the road Active Steering modifies the position of the
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 98
GO-KARTING
steering wheels determined by the steering, thus stabilizing the car much faster and more
efficiently than the steering would be able to do himself.
Active Steering enhances the typical virtues of BMW steering, making the car even more
agile and nimble at low and medium speeds while retaining that authentic steering feedback and
even offering a genuine "kart" feeling at low speed-levels. Active Steering also serves to enhance
steering comfort. While the steering has to turn the steering wheel approximately three times in a
current BMW from lock to lock, active steering reduces this control process to just two turns of
the steering wheel by cutting back the steering wheel angle at low and medium road speeds.
The steering will immediately enjoy the reduced steering force, for example when
maneuvering in confined parking spaces or when taking a sharp turn in town. Crossing over your
hands on the steering wheel, for example on a winding mountain pass, is hardly necessary any
more with Active Steering. So while the steering often has no choice in a car with conventional
steering but to cross over his arms, in a BMW equipped with Active Steering his hands will
always remain where they should be: in exactly the right position on the steering wheel. This
guarantees unrestricted, smooth and easy operation of the multifunction buttons and SMG
paddles shifting the Sequential Manual Gearbox directly on the steering wheel, ensuring for
safety.The greater agility and enhanced dynamic performance provided by Active Steering
comes out particularly clearly in the slalom test, simulating sudden steering maneuvers at low
and medium speeds: Active Steering gives the steering much better control of the car than
conventional steering, combined with significantly enhanced steering precision and an equally
significant reduction of steering forces. And ultimately, the greater comfort and control provided
by Active Steering helps to keep the steering fit and avoid any fatigue at the wheels.
With increasing road speeds, Active Steering reduces the steering wheel lock and makes the
steering transmission ratio more indirect. To put it in simple terms, the steering would now have
to move the steering wheel further than at low speeds in order to obtain the same lock on the
front wheels. This efficiently avoids common mistakes at the wheel, for example with the
steering abruptly wrenching round the steering wheel when panicking at high speeds. A further
advantage of an indirect steering transmission ratio at high speeds, finally, is the perfect straight
line tracking stability.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 99
GO-KARTING
Steer by wire systems
The main feature of future steering systems is the missing direct mechanical link between
steering wheel and steered wheels. With such a steer-by-wire steering system (Fig.11) the
missing steering column’s function must be reproduced in both directions of action. In forward
direction the angle set by the steering at the steering wheel is measured by a steering angle
sensor and transferred with the suitable steering ratio to the wheels. In reverse direction the
steering torque occurring at the wheels is picked up via a torque sensor and attenuated
respectively, modified fed back to the steering as a counter torque on the steering wheel.
Figure 36: Steer by wire system
First, steering wheel module and steering module are implemented with familiar
components of mechanical and electrical steering systems, like: Steering wheel, gearbox,
electrical motors, rack. The operational principle is, however, in principle open for more
futuristic designs like side stick operation on the steering’s side and single wheel steering on the
wheel side. While in systems with mechanical connection in the case of electrical errors only the
steering boost is concerned, corresponding measures must be taken with steer-by-wire systems,
that in case of any electrical failure steering control is always guaranteed.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 100
GO-KARTING
Advantages of steer-by-wire systems
Steer by-wire is a universal actuator for automatic steering intervention. For vehicle
dynamic steering intervention a steering angle actuator is needed which does not affect the
steering wheel while rapidly correcting the vehicle wheels. On the other hand, a torque actuator
will be needed for automatic lateral guidance interference and future steering systems of
autonomous driving, thus imparting a superimposed torque onto the steering wheel and letting
the steering with that know the intended direction, evaluated by the lateral guidance control
system. Steer-by-wire meets both requirements ideally. Along with "steering by wire” and "brake
by wire “it provides the condition to materialize vehicle dynamics and comfort oriented
automatic controls in one system. Design advantages for the automaker –the rigid steering
column curbs the design freedom for the engine compartment. On either side space has to be
provided (left-hand or right-hand driving). Steer-by-wire implies that no steering column impairs
the good usage of engine compartment.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 101
GO-KARTING
Fabrication
Chassis
First of all, the chassis is constructed. The MS pipe is taken as per dimensions and bends in
required places using bending machine. Then the pipes are welded.
Axle
The required shaft is taken as per the dimensions and turned on the lathe.
Sprocket
The sprocket is welded on the axle at required place.
Brake
The brake is also placed in the axle near to the tyre. The boredom is connected to it and is
connected to left pedal in front of kart.
Accelerator
The accelerator pedal is placed is the right side of the front of the kart and is connected to the
engine.
Engine
The engine is mounted in the chassis and the chain is connected to the sprocket and engine.
Fuel tank
The fuel tank is placed in the upper position of the engine level using welding technology.
Rear wheels and tyres
The 2 wheels are connected to the both ends of the axle and welded together. Then the assembly
is connected to the chassis using 2bushed bearing.
Steering
The steering spindle and steering are made as per the dimensions and bolted together. This is
connected to the rack and pinion mechanism. This mechanism is connected to the 2 front wheels.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 102
GO-KARTING
Seat
First the seat is cushioned and then mounted on chassis using bolts.
Electric start
The battery is placed under the seat and connected to the starting motor using wires. And the
switch is placed in the steering spindle stand.
Painting
The painting is done to increase the appearance to the kart. The chassis, steering and steering
spindle, wheels, seat, muffler, engine cover etc are painted using different colors. The pedals are
also painted.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 103
GO-KARTING
CHAPTER 6
PERFORMANCE STUDY
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 104
GO-KARTING
Performance study
First of all, we say that this is not a performance machine. We are taking a two – wheeled
engine and connected to four wheels. So the performance also deferrers. We tested this vehicle at
standard conditions. Engines are tested to find out the variations of Brake Horse Power,
Torque, Fuel Consumption, Frictional Horse Power and Specific Fuel Consumption at different
engine speeds.
Performance curves
Figure 37: Performance study
1. Torque Vs RPM
From the graph, we see that during medium speeds, torque increases with speed. The
volumetric efficiency being higher during this period (cylinders get enough fuel – air mixture to
burn), higher combustion pressures produce more power. At high speed, engine cylinders induce
less amount of fuel – air mixture reducing combustion pressures and hence the torque, the curve
drops down.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 105
GO-KARTING
2. BHP Vs RPM
From the graph, we see that the brake horsepower of an engine steadily increases with the
increase of engine rpm. At a certain engine speed, the bhp drops down instead of increasing. This
is due to two reasons.
1. At high speeds, the volumetric efficiency of the engine decreases considerably, i.e. it takes in
decreased quantities of fuel – air mixture producing lower combustion pressures and hence
lowers engine power.
2. We also know that frictional losses in an engine increase five times as the engine speeds up
from 1000 to 3000 rpm, decreasing the brake horsepower.
3. FHP Vs RPM
Frictional Horse Power increase in speed. Frictional loses are lower at low engine speeds.
These losses increase considerably with the increase in rpm. The horsepower lost due to friction
increases five times as the engine speed increases from 1000 to 3000 rpm. The frictional losses
in an engine may be due to friction between rings and cylinders, valves and valve guides, timing
gears, bearings, hydraulic resistance of inlet and exhaust valves etc. The major source of friction
loss in an engine is between piston rings and cylinder, which contributes to 70% of the total
engine friction.
4. Specific Fuel Consumption Vs RPM
The specific fuel consumption decreases with the increase of engine rpm. The fuel
consumption per hp/ hr in the case of diesel engines is less at all engine speeds. As shown in the
graph, at engine speeds above 2,500 rpm, the specific fuel consumption increases in both petrol
and diesel engines. When engine load decreases, the specific fuel consumption increases slightly.
Therefore, we conclude that brake fuel rate is higher for slow speed engines, increases a little for
medium speed engines and increases more for high-speed engines. This is because at low and
maximum speeds, a rich mixture is required.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 106
GO-KARTING
CHAPTER 7
SERVICE
AND
MAINTANANCE
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 107
GO-KARTING
Service and maintanance
Servicing
a) Only qualified service personnel should carry out servicing activities on this machine.
b) Always use standard engine components as specified.
c) Servicing must be done at regular intervals.
Maintenance Schedule
a) Daily
i) Check the lubrication oil in the sump. Tap up necessary.
ii) Keep the fuel tank full. The tank should be fitted in completely with clean petrol at the end of
the day’s work.
iii) Check the tyre pressure. The pressure must be at least 18 psi.
iv) Clean the engine at the end of day’s work, if there are any leakages, dust will collect at the
leaky spots during next day work. Such leakages should be attended properly.
b) Every 50 kms
i) Inspect fuel lines, throttle operation, brake shoe, wheels and tyres, etc.
ii) Adjust throttle operation, carburetor, valve clearance, etc.
iii) Clean the carburetor, air cleaner, spark plug, etc.
c) Every 250 kms
i) Lubricate the braking system.
ii) Check all bolts and nuts.
d) Every 500 kms
i) Replace fuel filter
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 108
GO-KARTING
e) Every 750 kms
i) Thoroughly clean out the fuel tank and refill fresh fuel.
ii) Knock out soot from the exhaust silencer.
iii) Remove the cylinder head and de-carbonize.
f) Every 1000 kms
i) Adjust carburetor
ii) Replace spark plug.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 109
GO-KARTING
Trouble – shooting
a) Engine does not start
Lack of petrol - Check that chock is operated when starting engine from cold.
Too much petrol- a strong smell of petrol will be present near the carburetor and the outside of
the carburetor maybe quire wet. The trouble is that the mixture drawn is not been fired by the
plug. Check as for next.
Lack of spark- Take out plug and see if wet (condition previous above) or excessively dirty.
Clean plug and readjust points, if necessary. If engine is already flooded, kick over smartly half a
dozen times before replacing plug. If plug is still not sparking, remove again and hold against
side of engine and kick engine over. Spark jumps the plug: check that the spark jumps the plug
about ¼ in. to engine casing. If lead sparks but plug does not, fit a new plug. If load does not
give proper spark, check under ignition fault.
Ignition trouble- Remove flywheel domed cover and check points for (a) incorrect gap (b)
points dirty or worn. Adjust or correct, as necessary. Check for broken, bread or disconnected
leads to coil (green wires) or earth lead (black) broken off from crankcase.
b) Engine starts but soon after turn off
Lack of petrol- If the petrol tap is not turned on, the engine may start on the petrol in the
carburetor but will run of fuel very soon after.
Ignition fault -Check wires for loose connection
c) Engine runs badly (Idling and moderate speeds)
Incorrect mixture- Adjust idling screws on carburetor. Check that throttle slide in carburetor is
not sticking.
Mixture too lean- Check for air leaks, e.g. carburetor top loose, gaskets faulty, etc.
Mixture too rich- Check that chock has not been left out.Check the atomizer jet is not enlarged.
(Other than plug) Check that carburetor flat has not stuck or become ‘holed’ and sunk.
Ignition fault- Check plug first then contact breaker. Observe plug to see if type is matched to
engine
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 110
GO-KARTING
d) Engine runs badly (Engine speeds)
Poor Carburetor-Check as above. Check also that carburetor is vertical, not displaced, causing
float to stick.
Ignition fault- Check as above. Check that contact breaker arm is not seized or stiff on its pin.
Check that contact-breaker spring is intact and not too weak. Condenser may be faulty. Check it
in garage and change sparking plug which may be defective. In such a case not fault will be felt
at low speed but as the road speed increases, erratic running of the engine will be felt and
unpleasant sound from the exhaust will be heard. Change spark plug. To check that the fault is
because of the spark plug, replace it with a new or used spark plug and run the vehicle. If no fault
is observed then original spark plug needs changing. The test for condenser may also be done in
the same fashion.
e) Engine lacks pulling power
Poor Carburetor- Check as above.
Ignition fault-Check as above
Engine Blocked with carbon- Engine and silencer needs decarburizing 500 kms on a new
machine or 1000 kms, if the machine is driven hard.
Mixture too rich- Check if choke is on.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 111
GO-KARTING
CHAPTER 8
PROCESS SHEET
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 112
GO-KARTING
Process sheet
1. Part name: shaft
Part weight – 1kg
Part material – C30
Part quantity – 1
Part size – Φ30×900 mm.
Table No: 3
Operation Machine Tool Time Inspection
1 .Cutting the Power Hacksaw Hacksaw Blade 10 min Steel Rule
material as per
our required size.
2.Facing both Lathe machine facing tool 10 min Vernier Calliper
side
3. Inserting the Vice hammer 10 min
Bering
2. Part name: bearing mounter-1
Part weight – 0.5 kg
Part material – S.S
Part quantity –6
Part size – 60 x 10 x 60 mm.
Vernier Caliper
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 113
GO-KARTING
Table No: 4
Operation Machine Tool Time Inspection
Cutting Power Hacksaw Hacksaw Blade 10 min Steel Rule
the material as per
our required size.
Drilling Lathe machine Drilling 10 min Vernier Calliper
10mm hole Bit 10mm
Make Φ35mm Lathe machine Boring tool 15 min Vernier Calliper
3. Part name: bearing mounter-2
Part weight – 1 kg
Part material – M.S
Part quantity – 2
Part size – 60 x 10 x 60mm.
Table No: 5
Operation Machine Tool Time Inspection
Cutting Power Hacksaw Blade 10 min Steel Rule
the material as per Hacksaw
our required size.
Drilling 10mm Lathe machine Drilling 10 min Vernier Calliper
Bit 10mm
Make Φ35mm Lathe machine Boring tool 15 min Vernier Calliper
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 114
GO-KARTING
6. Part name: lower frame
Part material – M.S
Part quantity – 1
Part size - Lower Part –900x1550 x40 mm,
Table No: 6
.Operation Machine Tool Time Inspection
Cutting Power Hacksaw Hacksaw Blade 40 min Steel Rule
the material as
per our required
size.
Grinding sharp Grinding wheel Wheel 30min Vernier Calliper
edges
Welding Arc welding Welding holder 40 min
of a frame
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 115
GO-KARTING
Used materials and their properties
The materials used in this project are detailed as follows
Ferrous materials
A) Mild steel – EN – 4 to EN – 6
Carbon – 0.15% to 0.35%
Tensile strength –1200/1420MPA
Yield strength – 750/1170 MPA
B) C30 Carbon – 0.25% to 0.35%
Tensile strength – 620 MPA
Yield strength – 400 MPA
Izod Impact Value – 55 Nm
% Minimum Elongation – 21
Typical composition –– Carbon – 0.25% to 0.35%
Manganese – 0.60% to 0.90%
BHN – 207
C30 material is generally used for cold formed levers, hardened and tempered tie
rods, Cables, Sprockets, Hubs and Bushes –Steel Tubes.
C) 40C8 Carbon – 0.25% to 0.35%
Tensile strength – 620 MPA
Yield strength – 400 MPA
Izod Impact Value – 55 Nm
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 116
GO-KARTING
Non metallic materials
The non-metallic materials are used in engineering practice due to their low
density, low cost, flexibility, resistance to heat and electricity. Though there are many non-
metallic materials, important materials used in our project are listed below:
A) plastic (nylon): Tensile strength – 82 N/mm2
Compressive strength – 35 N/mm2
Yield strength – 8500 psi
Rockwell Hardness Number – R112-120
The plastics are synthetic materials which are molded into shape under pressure
with or without the application of heat. These can also be cast, rolled, extruded, laminated, and
machined. Following are the two types of plastics;
(a) Thermosetting plastics
(b) Thermoplastics.
The thermosetting plastics are those which are formed into shape under heat and
pressure is applied, it becomes hard by a chemical change known as phenol formaldehyde
(Bakelite), phenol-furfural (Durite), urea-formaldehyde (Plasmon), etc.
The thermoplastic materials do not become hard with the application of heat and
pressure and no chemical change occurs. They remain soft at elevated temperatures until they are
hardened by cooling. These can be remolded repeatedly by successive application of heat. Some
of the common thermoplastics are cellulose nitrate (Celluloid), polythene, NYLON, polyvinyl
acetate, polyvinyl chloride (P.V.C.), etc.
The plastics are extremely resistant to corrosion and have high dimensional
stability. They are mostly used in manufacture of aero plane and automobile parts. They are also
used for making safety glasses, laminated gears, pulleys, self lubricating bearings, etc. due to
their resilience and strength.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 117
GO-KARTING
2. Rubber
It is one of the most important natural plastics. It resists abrasion, heat, strong alkalis, and
fairly strong acids. Soft rubber is used for electrical insulations. It is also used for power
transmission belting, being applied to woven cotton as a base. The hard rubber is used for piping
and as lining for pickling tanks.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 118
GO-KARTING
Equipments required in go-kart
Introduction: Breakdown of the vehicle can occur due to many reasons such as accidents,
broken parts, loss of strength of component material etc. Such vehicles are brought to auto
garage for repairing. For repairing work, same tools, machines and equipments are required. A
list of which is given here.
1. Hammers.
2. Spanners.
3. Pliers.
4. Screw drivers.
5. Wrench.
6. Feeler gauge.
7. Pullers.
Figure 38: Tool Box
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 119
GO-KARTING
Tools used in GO-KART
Table No: 7
No. Tool used Type Specific Where to be used
no.
1. Wrench Open ended 10 To remove the cylinder head
2. Special Spark plug remover - To remove spark plug from
tool cylinder head
3. Wrench Open ended 18,20,15 To remove steering assembly
4. Wrench Open ended 16,15,19 To adjustment steering assembly
5. Wrench Box wrench 22 To remove front wheel from
6. Wrench Box wrench 15 To remove wheel
7. Wrench Ring 8 To dismantle carburetor
8. Wrench Open ended 22 To remove stub axle from chassis
9. Wrench Open ended 10 To remove side panels
10. Wrench Open ended 13,10 To remove fuel tank
11. Wrench Open ended 10 To remove front panel
12. Wrench Open ended 10 To remove spoiler
13. Wrench Open ended 10 To remove seat from chassis
14. Wrench Allen key 12 To remove pedals
15. Wrench Open ended 17 To remove pedals
16. Wrench Box wrench 24 To remove rear axle from chassis
17. Wrench Open ended 13 To remove wheel from rear axle.
18. Wrench Box wrench 22 To remove wheel
19. Wrench Ring 17,12 To remove engine from chassis
20. Wrench Ring 8 To remove exhaust from engine
21. Wrench Box 22 To dismantle drum brake
22. Wrench Ring 13 To remove sprocket
23. Wrench Ring 13 To remove rear axle sprocket
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 120
GO-KARTING
Miscellaneous Topics
Driving hints:
1) Before you take out vehicle, it must be ensure that it is in a good condition. Check up brakes,
steering, tyres, tyre pressure. Also check up the fuel level, level of battery electrolyte
.2) The basic rule is to keep to keep to the left. Do not drive along the middle of the road.
3) Be familiar with road markings.
Parts to be lubricated:
Table No: 8
Sr. no. Parts to be lubricated Lubricant /grease,
grade
1. Engine Petro-oil(1l: 60ml)(2T)
2. Stub axle Grease
3. Foot pedals Oil
4. Tie rod ball joints Grease
5. Steering bearings Oil + grease
6. Rear shaft bearing hub Grease
7. Sprockets (2) Oil + grease
8. Steering wheel joint Grease
9. Chain Oil
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 121
GO-KARTING
CHAPTER 9
MAKE OR BUY DECISION
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 122
GO-KARTING
Make or buy decision
The make or buy decision refers to the problem encountered by an organization when
deciding whether a product or service should be purchased from outside sources or manufactured
internally. Theoretically every item which is currently purchased from an outside supplier is
always a candidate for internal manufactured and every item currently manufactured in house is
a potential candidate purchase. The majority of the make or buy decision are made on the basis
of price. But this is only one of the criteria which is to be evaluated in this strategic decision
many non-cost factor encourage long term contracts with the suppliers to aid in the achievement
of production and quality levels and encourage investments in appropriate resources and new
ideas. This result in excellent mutually beneficial customer supplier relationships developed over
long period base on trust and achievement of common objectives most of the make or buy
decisions are complex time consuming and affect many parts of the organization senior
management involvement is required in a number of the stages of this strategic decision.
Make or buy decision when:
The following situation demands for the evaluation of make or buy decision
1. When the organization introduce new products
2. The fluctuating demand for the company’s products
3. When the organization carries out value analysis or cost reduction programs
4. Deteriorating quality & delivery commitment of the supplier if presently the item
is bought
5. The scarcity of funds for investment in additional plant & equipment
Factor influencing make or buy decision
1 . Volume of production- the quality or volume of production affect the make or buy decision
to the greater extent if the volume the production is very high it fevers the make decision & low
volume fevers the buy decision
2 . Cost analysis- the cost analysis refers to the determination of cost to make item as well as
the cost by it the cost may include the material cost, direct labor cost, set up & tooling cost,
depreciation & administrative overhead, interest, insurances, taxes, and the tooling up cost of
raw materials and work in process. The cost to make also include the appropriate allowances
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 123
GO-KARTING
spoilage of work and scrap. And the risk associated with doing business. The cost to buy an item
should include – purchase price of the item or component. Transportation cost sales tax and
procurement cost, receiving and incoming inspection cost. The analysis of these two costs helps
take decision whether to make or buy.
3. Utilization of production capacity: the organization which has created large production
capacity favors the decision making.
4. Availability of manpower: Availability of skilled & competent manpower favors make
decision whereas scarce manpower prefers buy decision .
5. Fixed cost: A lower fixed cost favors the decision to make & higher fixed cost the buy
decision.
Make or buy decision
Table No: 9
Sr. No Description Decision
1 Chassis Make
2 Engine Modified
3 Steering System Modified
4 Wheels and tyres Buy
5 Brake (Drum) Make
6 Rear Axle Make
7 Transmission System Modified
8 Fuel Tank Make
9 Seat Make
10 Muffler Buy
11 Nut & Bolts Buy
12 Air Cleaner Buy
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 124
GO-KARTING
CHAPTER 10
ESTIMATION AND
COSTING
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 125
GO-KARTING
Estimation and costing
Costing may be defined as systematic procedure for recording accurately every item of
expenditure, incurred on the manufacture of a product by different departments of any
manufacturing concern.
Objectives of Cost Estimation:
Main objectives of costing are as follows:
a) To help the producer in deciding the manufacturing and selling policies.
b) To help in filling up tender enquiries.
c) To decide the amount of overheads, this helps in comparing and checking the actual overheads
of the factory.
d) To decide the wage rates of the workers after carrying out a time study.
e) It helps to decide whether a particular material should be purchased from the market or to be
manufactured.
f) It helps in improving the designs, which may reduce the cost of production
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 126
GO-KARTING
Estimation and costing
Table No: 10
Sl. No Description Quantity Cost in Rs.
1 Chassis 1 3800
2 Engine (Kinetic 1 4500
Honda)*
3 Steering System 1 1500
4 Wheels and tyres 4 3200
5 Brake (Drum) 2 500
6 Rear Axle 1 1000
7 Transmission System 1 1500
8 Fuel Tank 1 300
9 Seat 1 500
10 Electro Plating 50
11 Muffler 1 300
12 Extra Fittings 1400
13 Painting 300
14 Labor Cost** 2000
15 Indirect Material 500
Cost***
TOTAL 21350
* Kinetic Honda Engine with whole fuel system
** Labor cost includes cost for welding, boring, drilling, lathe work etc.
*** Indirect material cost includes cotton waste, emery paper, oil,kerosene, grease etc.
The whole cost producing one kart is Rs. 21,350/-
After taking 25% profit, the cost will be Rs. 27,000/-
After giving discounts and commissions, we can sell a go – kart at Rs. 27,000/-
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 127
GO-KARTING
CHAPTER 11
PROJECT PLANNING
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 128
GO-KARTING
Project planning
Introduction
The kind of small-scale industry that we are intending to start is an assembling industry.
We are sure to manufacture the product according to the customer’s requirements. We are not
making only go- karts in this industry. Only secondary production is kart. Primary production is
motorcycle with the same engine. The manufacturing of karts will be according to orders. Our
manufacturing shop will be well equipped with all machines such as lathe, drilling machine,
grinding machines, milling machine, power hacksaw, welding machine, etc. So that we can do
any production work in connection with replacement of worn out parts of the job. We can also
provide job opportunities for 6 technical and 3 managerial staff. Using present equipment either
it may be loss of our valuable energy and time or otherwise it may be loss of money. Our venture
is a solution for that. In near future we plan to develop our industry and increase the production
according to customer requirements.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 129
GO-KARTING
Market survey
Before establishing our plant we conducted a market survey to know the trend of the
market. Since our project is one which gives much important to time saving and energy loss
main customers are attracted. Hence our survey was made to collect the opinions and suggestions
from those who in racing field. The points we have covered during our survey were:
a) Methods of present system
b) Advantages of present system
c) Disadvantages of present system
d) Expense of present system
e) Suggestion of new systems from them
f) Presentation of our project before them
g) Their opinion about the proposal
h) Feasibility of the project in their work
i) Convincing them of our reliability
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 130
GO-KARTING
Summary of market survey report
Survey reveals the attitude of customers towards the projects. 70% of them were against
the present system because the present system may either be energy and time consuming or it
may be costly. So wastage of money and valuable time is a problem. 10% of them were satisfied
with the present system, because they have the ability to bear the cost. The next 10% of them
were satisfied by the cheap equipment because of their poor living condition. The remaining
10% were indifferent to this question because they don’t have enough knowledge in this field.
Anyhow 100% of the customers welcomed the new proposal. They guaranteed their extreme co-
operation.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 131
GO-KARTING
Plant layout
Plant layout means the disposition of the various facilities (equipment, material,
manpower, etc.) and service of the plant within the area of the site selected previously. Plant
layout begins with the design of the factory building and goes up to the location and movement
of a worktable. All the facilities like equipment, raw materials, machinery, tools, fixtures,
workers, etc. are given a proper place. In deciding the place of equipment, the supervisors and
workers who have to operate them should be consulted.
Objectives of good plant layout
In a good plant layout:
1) Material handling and transportation is minimized and efficiently controlled.
2) Bottlenecks and points of congestions are eliminated (by line balancing) so that the raw
material and semi-finished goods move fast from one workstation to another.
3) Workstations re-designed suitably and properly.
4) Suitable spaces are allocated to production centers and service centers.
5) The movements made by the workers are minimized.
6) Waiting time of the semi-finished products is minimized.
7) Working conditions are safer, better (well ventilated rooms, etc.) and improved.
8) There is increased flexibility for changes in product design and for future expansion.
9) There is the utilization of cubic space (i.e. length, width and height).
10) There are improved work methods and reduced production cycle types.
11) Plant maintenance is simpler.
12) There is increased productivity and better product quality with reduced capital cost.
13) A good layout permits materials to move through the plant atthe desired speed with the
lowest cost.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 132
GO-KARTING
Plant location
Hardly any location can be ideal or perfect. One has to strike a balance between various
factors affecting plant location, which is discussed below.
Concept and Factors Governing Plant Location
A plant is a place, where men, materials, money, equipment, machinery, etc. are brought together
for manufacturing products. The problem of plant location arises when starting a new concern or
during the expansion of the existing plant. Plant location means deciding a suitable location,
area, place, etc. where the plant or factory will start functioning. Plant location involved two
major activities. First, to select a proper geography region and second, selecting a specific site
within the region. Plant location plays a major role in the design of a production system the cost
of
a) Getting suitable raw material
b) Processing raw material to finished goods; and
c) Finished products distribution to customers.
Hardly any location can be ideal or perfect. One has to strike a balance between various factors
affecting plant location, which are discussed below:
1. Nearness to Raw Material
It will reduce the cost of transporting raw material from the vendor’s end to the plant.
Which consume raw material in bulk, or raw material is heavy, is cheap but loses a good amount
of its weight during processing (trees and saw mills), must be located close to the source of raw
material.
2. Transport Facilities
A lot of money is spent both in transporting the raw material and the finished goods.
Depending upon the size of raw material and finished goods, a suitable method of transportation
like roads, rails, water or air is selected and accordingly the plant location is decided. One point
must be kept in mind that cost of transportation should remain fairly small in proportion to the
cost.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 133
GO-KARTING
3. Nearness to Markets
It reduces the cost of transportation as well as the chances of the finished products getting
damaged and spoiled in the way (especially perishable products). Moreover plant being near to
the market can catch a big share of the market and can render quick service to the customers.
4. Availability of Labor
Stable labor force, of right kind, of adequate size (number), and at reasonable rates with
its proper attitude towards work are a few factors which govern plant location to a major extent.
The purpose of the management is to face less boycotts, strikes or lockouts and to achieve lower
labor cost per unit of production.
5. Availability of Fuel and Power
Because of the wide spread use of electric power, in most cases fuel (coal, oil, etc.) has
not remained a deciding factor for plant location. Even then steel industries are located near
source of fuel (coal) to out down the fuel transportation costs. It is of course essential that
electric power should remain available continuously, in proper quantity and at reasonable rates.
6. Availability of Water
Water is used for processing, as in paper and chemical industries, and is also required for
drinking and sanitary purposes. Depending upon the nature of plant, water should be available
inadequate quantity and should be of proper quality (clean and pure). A chemical industry should
not be set up at a location, which is famous for water shortage.
7. Climatic conditions
With the developments in the field of heating, ventilating and air-conditioning, climate of
the region does not present much problem. Of course, control of climate needs money.
8. Financial and Other Aids
Certain states give aids as loans, feed money, machinery, built up sheds, etc. to attract
industrialists.
9. Land
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 134
GO-KARTING
Topography, area, the shape of the site, cost, drainage and other facilities, the probability
of floods, earthquakes (from the past history),etc. influence the selection of plant location.
10. Community Attitude
Success of an industry depends very much on the attitude of the local people and whether
they want work or not.
11. Presence of Related industries
12. Existence of hospitals, marketing centers, schools, banks,
post offices, clubs, etc.
13. Local bye-laws, taxes, building ordnances, etc.
14. Housing facilities
15. Security
16. Facilities for expansion
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 135
GO-KARTING
Locational economics analysis
1. Locations considered
a. Location - 1
It is, Satara MIDC situated 2 Km from Satara. It is sub-urban area.
b. Location - 2
It is PUNE, situated 90 Km from Satara. It is an urban area.
Table No: 11
Factors Cost of Location – 1 Location – 2
Land 20 (cents) 10,000 (Rent) 25,000 (Rent)
Water Less More
Power Less More
Labor Less More
Transportation More Less
Taxes Less More
Community facilities Good Good
Community attitude Encouraging Indifferent
Housing facility Medium Very Good
Cost of Living Medium Large
Community Size Medium Large
Studying the data obtained by location analysis we can see that transportation charges for
location-2 is less than that of location 1. But all other situation favors location-1. Hence location-
1 seems to be a better choice.
Pune is 90 Km away from Satara. We will be obtaining a shed from here at a rent of Rs. 600/-
month. The shed is well suited for the proposed maintenance concern. Electric supply is already
there and water is already available. Transportation will be available here. The area of building is
4,500sq.feet, which is very much to accommodate. Climatic and atmospheric conditions are very
good.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 136
GO-KARTING
CHAPTER 12
ENTERPRENERSHIP
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 137
GO-KARTING
Enterprenership
An entrepreneur is defined as an agent of charge. He is the most critical factor. In the
economic development of any region, he plays a very important and catalytic role in activating
the factors of production leading to the overall economic development. This is the view of
economists on entrepreneurship. Entrepreneur should posses judgment perseverance, knowledge
of the world and business and also the ability to superintend and administrator. He is often
described as engineer of industrial progress and chief agent of production. To summarize
entrepreneurship can be described as a creative and innovative response to the environment such
response can take place in any field of social endeavor business, industry, agriculture, education,
social work and life.
An analysis of the above viewpoints on entrepreneur behavior highlights the following features.
a) Entrepreneurial behavior is a result of an interaction of individual factors and situational
factors and situational factors of psychological factors and experimental factors.
b) Individual differ in their potentiality for entrepreneurship.
c) Even a high differ in their potential need not invariable result in entrepreneurial success.
d) Factors such as training and institutional support and other factors assume importance in
entrepreneurship development.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 138
GO-KARTING
Entrepreneurial Characteristics
a. Need for Achievement
The need to sell known as achievement is the single psychological factor that has been
extensively researched of in relation to entrepreneurship. Mr. Cleland had demonstrated that
achievement notice is a critical factor for entrepreneurship. Entrepreneurship are people with
high drive and high activity level, constantly struggling to achieve something which they could
call their own accomplishment. They are moderate risk takes at the same time they avoid high
risks. They work long hours, most of them assess their own strengths and weakness and
opportunities and threat from the environment.
b. Sense of Efficiency
A sense of effectiveness is yet another important psychological dimensions that
contributes to successful entrepreneurship. They solve problems instead of avoiding it. They will
show initiative rather than conformism confidence and action, orientation is their essential
characteristics. They should have clear goals for the future and tend to live in the present with
involvement. Entrepreneurs are basically inclined to test out their capabilities whenever an
opportunity arises and are open to feedbacks from such tests.
Time Orientation
The entrepreneur is neither completely future oriented nor completely past oriented. He is
programmie, he looks into the future, uses his past experience but lives intensively the present.
c. Competition
Entrepreneurs are certainly competitive in their orientation. They collaborate well with
other parties when they see such collaboration is to their advantage. Their competition is against
the goals set by themselves rather than with the goals set by others.
e. Saving for Future
Successful entrepreneur shows high sense of dignity of manual labor and have tendency
to save for future and to invest for further development. They have along term involvement with
their goals.
f. Development of Entrepreneurs
Entrepreneurship Development Programmers (EDPs) have been widely recognized as an
effective measure in promoting small-scale industry in our country. Entrepreneurship is a
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 139
GO-KARTING
function of several factors. At least four sets of factors which mainly influence it could be
identified they are:
i. The individual
ii. The socio-cultural factors
iii. The Support system
iv. The Environment.
i. The Individual
The individual constitutes the mode important element in entrepreneurship. He takes; the
decision to start an enterprise and it is the he who strives to make it a success. It is necessary,
therefore to understand the various factors which influence an individual. Three main
Factors influence behaviors are:
· His / her motivational factors
· The skill that entrepreneur posses
· His / her knowledge of several relevant
Motivational factors may be considered as most crucial to entrepreneurship. It has three major
elements.
The entrepreneur’s motivation
Personal efficiency
Copying capability
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 140
GO-KARTING
The following skills are also found most crucial contributing to entrepreneurship.
· Project development
· Enterprise management
· Enterprise building
· Knowledge and environment
· Choice of industry
· Knowledge of technology
ii. Socio-Cultural Factors
Socio-cultural factors like family background and the names and values of the immediate
social circle contribute substantially to entrepreneurial developments the individual worker under
some pressure of the values inherited from this behavior which reflect inclination towards
initiative and risk taking dependence or independence. Working with one’s own hands on tasks
requiring man, manual handling, etc.
The following aspects of normative behavior are relevant to
Entrepreneurship.
· Family expectations and pressure
· Risk taking
· Independence
· Work
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 141
GO-KARTING
Personality Characteristics of Entrepreneurs
Creative
Calculated risk taking
Not too discouraged by failure
Future oriented
Hard working
Persistent
Take personal responsibilities
Sets realistic goals
Drive for power
Drive for independence
Desire for feedback and learns from experience
Goal oriented
Ability to exploit situation
Willing to learn
Self confidence
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 142
GO-KARTING
Constantly under stress
Person for integrity
Likes to excel in work
Pleasant personality
Success oriented
Makes decisions
Non-structured
Opportunity seeker
Family and friends second to business
Courageous
Self starter
Take failure a step to success
Individualist
Multifaceted interests
Innovative
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 143
GO-KARTING
Takes challenges
Initiative and dynamic
Impatient
Sensitive and perceptive
Thinks to improves always
Ability to grasp quickly
Aggressive
Leader
Enjoys work play and living
Dissatisfied with general life
Average intelligence
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 144
GO-KARTING
CHAPTER 13
SMALL SCALE INDUSTRY
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 145
GO-KARTING
Procedure to start a Small Scale Industry
Starting of a small-scale industry is not a very task. At the same time it is not very
difficult too, if different factors are considered before taking a decision to start it. For starting the
first and most important work is to select a suitable site and then to make the proper scheme and
give it
approved.
Procedure to start small-scale industry consists of the following important steps.
a. Selection of industry
b. Preparation of schemes
c. Approval of scheme
d. Registration of small industry
Selection of industry
Selection of industry or product that is going to manufacture on the basis of
· Market survey
· Finance
· Technical know-how available
· Economic viability
· Stability
· Experience in the time
Market Survey
Before starting a business, market survey is very essential to know about what must be
produced, how much to be produced, what will be the margin of profit, etc. It provides necessary
statistic helpful or forecasting and planning a project. Mainly the object of market survey is to
inform the management as to what the future hold for its products and proposed products.
Finance
Government Assistance of Finance
Small-scale industries require financial assistance not only to purchase machinery and
equipment but also for purchasing raw materials and working capital. Today various
organizations are came forward for sufficient financial help for reasonable rate of interest.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 146
GO-KARTING
i. National Small-Scale Industries Corporation
ii. State Directorate of Industries
iii. State Industry Development Corporation
iv. Finance Corporation
v. Public Sector and Other Bank
National Small-Scale Industries Corporation (NSIC)
It provides the following assistances
· Supply of machines on hire purchase
· Marketing assistance to small scale industries
· Encouragement of export of small-scale industries products.
State Directorate of Industries (SDI)
It provides the following assistances
· Granting of essentially certificate for import of raw material, components etc.
· Distribution of source and indigenous raw materials to the industry units.
· Allotment of industrial plots/sheds to entrepreneurs.
· Arrangement of water and power.
· Provision of technical guidance.
Subsidy
15% subsidy on fixed capital investment is admissible to new units set up in the
backward area of certain districts such as Malabar, Idukky.The maximum subdivision admissible
in the areas declared backward by the Govt. of India is Rs. 1 lakh. Weygand is declared as non-
industrial
district and central investment subsidy in the district is 25% for all the other districts it is 10%.
Engineer entrepreneurships who set up their own small industrial units are eligible for interest
subsidy. The difference between interest rate of 7% per annum and the normal rate of interest
charged on the loans.
Loans and Concessional Rate of Interest
Loans are advanced to the small-scale industries under the state aid industries act and
rules framed there under got construction of factory building purchase of machinery and
equipment and working capital.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 147
GO-KARTING
Procedure to Get Loan
a) An application for loan is submitted to the district industries officer/ assistant director if
industries in a prescribed form. In case of industrial co-operative societies the application should
be submitted to the Assist and register co-operative societies who will forward the same with the
recommendations to authorities concerned.
b) SBI has introduced a scheme of financial assistance to small scale units under which working
capital is advanced against pledge of goods under lock and key on factory type. Advances are
also made against hypothecation on goods and bills under sanction, as well as against personnel
guarantees. Degree or Diploma holders in engineering who pass three months entrepreneurship
course from institution prescribed by Government of India are eligible for interest subsidy.
Technical know-how available
Owner should make him really converse with all acts, rules and literature which may help
him in setting up and rolling a small scale industry literatures published by the state and central
government are available for the help of interested persona large number of model schemes also
available with the Manager of publications. Civil line direct of industries and civil supplies also
helps in selection the products which have scope and which do not scope. Their lists are revised
from time to time considering different factors changing with development of small-scale
industry and demand.
Economic viability
The manufacture of the proposed product should be economically viable. The brake even
of the level of product should be below 40 – 50%of the installed capacity to withstand the
possible price cutting on other dislocation by the competitions. The proposed should have come
out from the laboratory and pilot project level to commercial exploitation.
Stability
The proposed product should have stable sales all the year round otherwise the cost
product may go up than making the product unstable.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 148
GO-KARTING
Set up and manage a small scale industry
Material
A manufacturing organization required of material which may consist not only raw
material but also semi processed, semi assembled parts and components. It is advisable to have
always make than one supplied for every material to ensure prompt and regular supply of quality
Material. There should be minimum stock of various materials to avoid any stock out. In other
words on the basis of the consumption rate and lead time determine.
a) The maximum and minimum quantity of any material to be stored.
b) The re-order level and re-order quantity, that is when to place the order and for what quantity.
Marketing
It is normal responsibility to make goods available to people at price they can afford to
pay at a time they need it. There should be sufficient sales to meet the entrepreneur’s experience
and to leave behind surplus. It is therefore essential to plan his marketing. It may also be difficult
to plan any product and procurement programme. In such cases it may be necessary to find out
alternative uses for men, machinery and equipment during the slack reason preparation of
schemes.
After deciding the product to be manufactured and that place of industry detailed is
prepared. This scheme should contain the type of machines their approximate cost, quantity or
raw materials and cost, details of land, building, number of workers, location proposed,
Infrastructure facilities available, factory layout, etc.
Management
The entrepreneurs should have initiative drive clarity of ideas and action and should be in
a position to enlist the willing co-operation of the workers to achieve the common goal. That is
successful management of his unit. The success of unit depends upon the attention the
entrepreneur pays to the various problems like arrangements for regular supply of raw material
scheduled production. proper management labor, timely arrangement of finance adhering to the
delivery schedules and ascertaining the cost of product strategy. Decide the size of market and
the type of product we want of to offer. Also study the customers for who want to cater, the price
and quality requirements of the customers. A study of the size of the mark should also include
the future growth prospect for the unit. Every product has a definite life cycle introduction
(infancy), growth (childhood) and adolescence maturity and decline. In order to retain a
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 149
GO-KARTING
reasonable return on our investment consistent with the growth of our units it is essential to plan
in advance improvements strategy or our product. Satisfied consumers are the base for the
survival of any organization.
Steps to Set Up a Small Scale Industry
1. Identification of a suitable product
2. Choice of location
3. Registration of the firm
4. Provisional registration
5. License from local administration
6. No objection certificate or license
7. Consent for electricity connection
8. Formulation of project report
9. Approval / license from other agencies
10. Approval of building plant
11. Apply for term loan
12. Land development and construction building
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 150
GO-KARTING
13. Ordering machinery
14. Application of margin money loan
15. Erection of machinery
16. Obtain service connection
17. Recruitment and training of personnel
18. Procurement of raw material
19. Trial run
20. Sales tax registration
21. Sales
22. Application for permanent registration
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 151
GO-KARTING
Facilities to Small Scale Industries
Governments have also offered a number of facilities, incentives and concessions to the
small industries to encourage the industrial development. Some of these are:
.Hire purchase of machinery
· Tax concessions
· Procurement of raw materials
· Power supply
· Water supply
· Market assistance
· Technical assistance
· Testing facilities
· Export promotion
· Import licenses
· Industries reserved for small scale sector
· Purchase programme
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 152
GO-KARTING
Advantages of Small Scale Industry
It provides better and quick employment
It is labor intensive and capital saving With small investment production can easily and quickly
started
No much sophisticate machines and modern technology is Needed
It attracts small savings and diverts them to productive channels
It provides economic development by rapid industrialization
It provides check in monopoly
It reduces in balance of income property
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 153
GO-KARTING
CHAPTER 14
PROJECT ALBUM
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 154
GO-KARTING
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 155
GO-KARTING
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 156
GO-KARTING
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 157
GO-KARTING
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 158
GO-KARTING
CHAPTER 15
CONCLUSION
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 159
GO-KARTING
The 98cc, 2 stroke, 4 wheeled racing car, Go-Kart, we finally made one under 25000 Rs
which is a big truth. But we made just a prototype of that performance machine. The materials
we used are not up to the mark of automotive standard. Big companies will design one go-kart at
a minimum of 2 years. But we made this from two months. We do not recommend driving this
go-kart at a speed of 80 km/hour but it is best suited in 30-40 km/hour speed. The project report
is prepared in such a manner that every layman can understand the details pertaining to the
project. The report is prepared in simple language and described well. The report give adequate
idea and design guide line for making suitable report is expected to prove valuable to the
successor students of production engineering to know the essentials of a project and project
report. The matter discussed in the early pages just gives a broad outline of small-scale
industries. We have, tried to cover all the aspects concerned with our project.
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 160
GO-KARTING
CHAPTER 16
REFERENCE
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 161
GO-KARTING
Reference Books
Automobile Engineering R. B. Gupta
Automobile Engineering Kripal Singh
Industrial Engineering and Management O. P. Khanna
Automotive Technology H. M. Sethi
Thermal Engineering M. ZakriaBaig
Machinery handbook
Industrial engineering O.P.khanna
Internet Websites
www.howstuffworks.com
www.answers.com
www.wikipedia.org
K.B.P. COLLEGE OF ENGG. SATARA.(Production Engg. Dept.) Page 162
You might also like
- Design and Analysis of Go Kart Chassis-3647 PDFDocument15 pagesDesign and Analysis of Go Kart Chassis-3647 PDFLalitChoudharyNo ratings yet
- Design and Analysis of Go Kart Chassis: MR - Virendra.S.PattanshettiDocument15 pagesDesign and Analysis of Go Kart Chassis: MR - Virendra.S.PattanshettiKaasamHarishKumarNo ratings yet
- G 5Document8 pagesG 5pachieduNo ratings yet
- Junior Pride PaperDocument11 pagesJunior Pride Paperapi-428005915No ratings yet
- Go Kart SynopsisDocument9 pagesGo Kart SynopsisShubham PuriNo ratings yet
- Consumer buying factors when purchasing Hero Honda bikesDocument22 pagesConsumer buying factors when purchasing Hero Honda bikesupender15489No ratings yet
- Hero Honda BikeDocument65 pagesHero Honda Bikechaubeyanand358100% (1)
- 1.1. Electric Car With PVC PipesDocument27 pages1.1. Electric Car With PVC PipesSubbu VarmaNo ratings yet
- Research Papers On Two Wheeler IndustryDocument8 pagesResearch Papers On Two Wheeler Industrygw1nm9nb100% (1)
- Race Go Kart Research EssaysDocument11 pagesRace Go Kart Research Essaysapi-491986784No ratings yet
- Consumer Buying Behviour On Hero Honda BikeDocument66 pagesConsumer Buying Behviour On Hero Honda BikenaorangeNo ratings yet
- Chapter IDocument35 pagesChapter IPrakash KhadkaNo ratings yet
- Research Paper On Automotive IndustryDocument5 pagesResearch Paper On Automotive Industryepfdnzznd100% (1)
- HondaDocument37 pagesHondaPAVAN KALYAN AMGOTH100% (1)
- Tata MotorsDocument9 pagesTata MotorsNaim Ahmed SisirNo ratings yet
- Preface: "Learning Categories You, and Practicing On That Learning Specialize You"Document51 pagesPreface: "Learning Categories You, and Practicing On That Learning Specialize You"Prashant SinghNo ratings yet
- Nano - RachitDocument10 pagesNano - RachitRachit TiwariNo ratings yet
- Honda ActivaDocument60 pagesHonda Activasachin1065100% (1)
- Case Study On Four WheelerDocument35 pagesCase Study On Four WheelerViŠhål PätělNo ratings yet
- Karthik PprofileDocument18 pagesKarthik PprofileHomework PingNo ratings yet
- Special Purpose Vehicles & Basic Hydraulics - 10909818 - 2023 - 06 - 04 - 12 - 25Document156 pagesSpecial Purpose Vehicles & Basic Hydraulics - 10909818 - 2023 - 06 - 04 - 12 - 25kranthiNo ratings yet
- Go Kart ReportDocument26 pagesGo Kart ReportPrabh GarchaNo ratings yet
- Variable steering mechanism for light vehiclesDocument10 pagesVariable steering mechanism for light vehiclesmikael bezerra cotias dos santosNo ratings yet
- The Future of Cars: Special ReportDocument5 pagesThe Future of Cars: Special ReportWild Billy Barker GahanNo ratings yet
- Single-Track Motor Vehicle Long Distance Congested Urban Traffic Cruising Sport RacingDocument11 pagesSingle-Track Motor Vehicle Long Distance Congested Urban Traffic Cruising Sport RacingAmanda Fauzi SiregarNo ratings yet
- A Nano Car in Every Driveway PDFDocument8 pagesA Nano Car in Every Driveway PDFAshwani MattooNo ratings yet
- How to Swap Ford Modular Engines into Mustangs, Torinos and MoreFrom EverandHow to Swap Ford Modular Engines into Mustangs, Torinos and MoreRating: 4 out of 5 stars4/5 (6)
- Study of Consumer PreferenceDocument78 pagesStudy of Consumer PreferenceParshant GargNo ratings yet
- NO. Page No. Research Design and MethodologyDocument61 pagesNO. Page No. Research Design and MethodologyAbhishek Dm50% (2)
- Macro Drivers of Market Attractiveness for India JVDocument14 pagesMacro Drivers of Market Attractiveness for India JVEsha ChaudharyNo ratings yet
- Case Study On Tata NanoDocument12 pagesCase Study On Tata Nanochamanrai70% (10)
- Design of Electric Go KartDocument21 pagesDesign of Electric Go KartRithik GowdaNo ratings yet
- Project StudiesDocument29 pagesProject Studiesshru29bhardwajNo ratings yet
- Car, Motor VehicleDocument16 pagesCar, Motor VehicleGaurav AnandNo ratings yet
- Part 2Document58 pagesPart 2Anonymous 0L2mVaINo ratings yet
- Consumer Buying Behaviour at Time To Purchase Hero Honda BikeDocument59 pagesConsumer Buying Behaviour at Time To Purchase Hero Honda Biketariquewali11No ratings yet
- Tata Nano Distribution System: 1 Prof.K.K.ShajahanDocument29 pagesTata Nano Distribution System: 1 Prof.K.K.ShajahanShajahan KhaderNo ratings yet
- Hero HondaDocument58 pagesHero HondaArjun SinghNo ratings yet
- 10 Chapter 3Document51 pages10 Chapter 3Nishi TaraiNo ratings yet
- A Study On Two Wheeler Bike inDocument37 pagesA Study On Two Wheeler Bike inBhavin_Patel_948167% (12)
- A STUDY ON THE EVALUATION OF EFFICIENCY OF RECEIVABLES MANAGEMENT AT SUZUKI MOTOR CYCLE INDIADocument93 pagesA STUDY ON THE EVALUATION OF EFFICIENCY OF RECEIVABLES MANAGEMENT AT SUZUKI MOTOR CYCLE INDIAStone ColdNo ratings yet
- Bajaj Pulsar IDocument7 pagesBajaj Pulsar Irdx216No ratings yet
- Java ExecutionDocument15 pagesJava ExecutionSUPRIYANo ratings yet
- A Project Report On People'S Perception Towards Maruti Suzuki Cars Prepared By:-Group 7 Prabhjot S..Document15 pagesA Project Report On People'S Perception Towards Maruti Suzuki Cars Prepared By:-Group 7 Prabhjot S..anuNo ratings yet
- Design and Fabrication of Foldable Electric Motor Powered Three Wheel Vehicle Ijariie5592Document35 pagesDesign and Fabrication of Foldable Electric Motor Powered Three Wheel Vehicle Ijariie5592UNITED CADD100% (1)
- Tatanano Strategic Cost ManagementDocument17 pagesTatanano Strategic Cost ManagementImtiyazMoverNo ratings yet
- Customer Preference For Bi-Cycles in Bagpat With Special Reference To HeroDocument102 pagesCustomer Preference For Bi-Cycles in Bagpat With Special Reference To HeroGuman SinghNo ratings yet
- Mahindra ReportDocument59 pagesMahindra ReportChaturvedi DivyanshuNo ratings yet
- Aprojectreportoncustomerperceptiontowardsthepost Saleservicesprovidedbytvsautoltd 120808223354 Phpapp01Document88 pagesAprojectreportoncustomerperceptiontowardsthepost Saleservicesprovidedbytvsautoltd 120808223354 Phpapp01pandeyved9383No ratings yet
- A Project Report On Marketing StrategiesDocument69 pagesA Project Report On Marketing Strategiesnk2409199375% (8)
- Bajaj Auto LTD - Marketing Case StudyDocument7 pagesBajaj Auto LTD - Marketing Case StudyyateenNo ratings yet
- HISTORY AND DEVELOPMENT OF TWO WHEELERS INDUSTRYDocument4 pagesHISTORY AND DEVELOPMENT OF TWO WHEELERS INDUSTRYdyanirajNo ratings yet
- 1969 Plymouth Road Runner: Muscle Cars In Detail No. 5From Everand1969 Plymouth Road Runner: Muscle Cars In Detail No. 5Rating: 4.5 out of 5 stars4.5/5 (3)
- 6ES73211BL000AA0 Datasheet enDocument3 pages6ES73211BL000AA0 Datasheet enAntonio SilvaNo ratings yet
- Manual Operacao Calibrador para Bancada Modelo ST 2a InglesDocument83 pagesManual Operacao Calibrador para Bancada Modelo ST 2a InglesAntonio SilvaNo ratings yet
- Design and Analysis of Cooling Fins: Deepak Gupta, Wankhade S.RDocument4 pagesDesign and Analysis of Cooling Fins: Deepak Gupta, Wankhade S.RAntonio SilvaNo ratings yet
- Chapter-20 (Aftab Mahesr-Majeed Shar-Khalil Memon-Hafeez Memon-AQ Tunio)Document9 pagesChapter-20 (Aftab Mahesr-Majeed Shar-Khalil Memon-Hafeez Memon-AQ Tunio)Antonio SilvaNo ratings yet
- Cooling DesignDocument46 pagesCooling DesignDaisy Johnson0% (1)
- 6ES73317KF020AB0 Datasheet enDocument5 pages6ES73317KF020AB0 Datasheet enAntonio SilvaNo ratings yet
- 6ES73221BL000AA0 Datasheet enDocument3 pages6ES73221BL000AA0 Datasheet enNgoc Thien TuNo ratings yet
- 6ES71934DL100AA0 Datasheet enDocument1 page6ES71934DL100AA0 Datasheet enAntonio SilvaNo ratings yet
- 6ES7332 5HB01 0AB0 SiemensDocument3 pages6ES7332 5HB01 0AB0 SiemensAntonio SilvaNo ratings yet
- Ceramics International: Yufei Tang, Mengchen Mao, Sha Qiu, Kang ZhaoDocument6 pagesCeramics International: Yufei Tang, Mengchen Mao, Sha Qiu, Kang ZhaoAntonio SilvaNo ratings yet
- B 8131 A 203Document3 pagesB 8131 A 203Antonio SilvaNo ratings yet
- 6ES73211BH020AA0 Datasheet enDocument3 pages6ES73211BH020AA0 Datasheet enAntonio SilvaNo ratings yet
- 00062858Document8 pages00062858pendexxNo ratings yet
- 00062858Document8 pages00062858pendexxNo ratings yet
- Journal of The European Ceramic SocietyDocument14 pagesJournal of The European Ceramic SocietyAntonio SilvaNo ratings yet
- 10.4416 JCST2016 00103Document8 pages10.4416 JCST2016 00103Antonio SilvaNo ratings yet
- Carbonate ReservoirsDocument16 pagesCarbonate ReservoirsMartik Martikian0% (1)
- 1 s2.0 S2187076414001158 MainDocument11 pages1 s2.0 S2187076414001158 MainAntonio SilvaNo ratings yet
- Sala My 2008Document7 pagesSala My 2008Antonio SilvaNo ratings yet
- Salomo 2016Document11 pagesSalomo 2016Antonio SilvaNo ratings yet
- Chemical Geology: Peter Lai, Kevin Moulton, Samuel KrevorDocument14 pagesChemical Geology: Peter Lai, Kevin Moulton, Samuel KrevorAntonio SilvaNo ratings yet
- 1 s2.0 S1750583613004519 MainDocument14 pages1 s2.0 S1750583613004519 MainAntonio SilvaNo ratings yet
- Ahmed 1965Document3 pagesAhmed 1965Antonio SilvaNo ratings yet
- Advances in Water Resources: Matthew Andrew, Branko Bijeljic, Martin J. BluntDocument8 pagesAdvances in Water Resources: Matthew Andrew, Branko Bijeljic, Martin J. BluntAntonio SilvaNo ratings yet
- Miya Naji 2016Document11 pagesMiya Naji 2016Antonio SilvaNo ratings yet
- Using Bone Ash As An Additive in Porcelain SinteringDocument11 pagesUsing Bone Ash As An Additive in Porcelain SinteringAntonio SilvaNo ratings yet
- Artigo - Pru Du 2S Albumin or Pru Du VicilinDocument3 pagesArtigo - Pru Du 2S Albumin or Pru Du VicilinAntonio SilvaNo ratings yet
- Experiment No9 Open Ended LabDocument13 pagesExperiment No9 Open Ended Labwajiha khan0% (1)
- Wire Wizard Catalogue AUDocument28 pagesWire Wizard Catalogue AUpotblakNo ratings yet
- Technical Recommendations For Choke Valve Specifications: ReferenceDocument4 pagesTechnical Recommendations For Choke Valve Specifications: ReferencejowarNo ratings yet
- Ty 5131Document4 pagesTy 5131Mohamed El-AyouttiNo ratings yet
- DIY Balancing.: © Tony Foale 2008Document6 pagesDIY Balancing.: © Tony Foale 2008Factory PerformanceNo ratings yet
- LAB 2 Free N Force VibrationDocument8 pagesLAB 2 Free N Force Vibrationmohdanis53yahoocomNo ratings yet
- Mechanical Vibration and Oscillation in Transmission LinesDocument27 pagesMechanical Vibration and Oscillation in Transmission LinesChhatrapal SinghNo ratings yet
- Experiment No. 3 Measurement of Specific Weight and Pressure Intensity of LiquidsDocument4 pagesExperiment No. 3 Measurement of Specific Weight and Pressure Intensity of LiquidsChristine KimNo ratings yet
- Chapter 1 HeatDocument10 pagesChapter 1 HeatJikni NobleNo ratings yet
- AUMA, Assembly InstructionsDocument2 pagesAUMA, Assembly InstructionsGordinhorsNo ratings yet
- Keperluan Document Sebagai Dasar Penerbitan SLODocument4 pagesKeperluan Document Sebagai Dasar Penerbitan SLOFaturrakhman KhairanNo ratings yet
- Biffi IS2000Document16 pagesBiffi IS2000Kolbert ArpadNo ratings yet
- Tables of Contents: ParveenDocument7 pagesTables of Contents: ParveensambhajiNo ratings yet
- Fan Application GuidelineDocument6 pagesFan Application GuidelineEdward SabedraNo ratings yet
- Rock Anchoring and Bolt Systems: - Rod Series - Anchors - Equipment - InstallationDocument40 pagesRock Anchoring and Bolt Systems: - Rod Series - Anchors - Equipment - InstallationTarekNo ratings yet
- 012.0 - Cat-6060 - Central Greasing System - AttachmentDocument50 pages012.0 - Cat-6060 - Central Greasing System - AttachmentJorby Cuadros100% (2)
- Pegasus EX 3200-5200 Parts ListDocument120 pagesPegasus EX 3200-5200 Parts ListJanos KornfeldNo ratings yet
- Characteristics of the Hydraulic Jump LabDocument10 pagesCharacteristics of the Hydraulic Jump LabnaeemNo ratings yet
- Cessna 172M CHECKLISTDocument3 pagesCessna 172M CHECKLISTDev ShahNo ratings yet
- Cat Sos 793&793b TrucksDocument7 pagesCat Sos 793&793b TrucksmkNo ratings yet
- Induction Motor Load Test AnalysisDocument6 pagesInduction Motor Load Test AnalysisCønstäh Van Der WüppertälärîanskíhNo ratings yet
- 1009 - Wind Loads On Duopitch Roof Building: DescriptionDocument7 pages1009 - Wind Loads On Duopitch Roof Building: DescriptionKris Lee100% (1)
- Ford Drive Cycle Information: Inspection / Maintenance Set ProcedureDocument3 pagesFord Drive Cycle Information: Inspection / Maintenance Set Proceduresenthur123No ratings yet
- COLUMN DESIGN REPORTDocument13 pagesCOLUMN DESIGN REPORTdongshengNo ratings yet
- MIE100H1 - 20195 - 631572298320MIE 100 CheatsheetDocument2 pagesMIE100H1 - 20195 - 631572298320MIE 100 CheatsheetSCR PpelusaNo ratings yet
- Elasticity & Oscillations: Ut Tension, Sic Vis As Extension, So Force. Extension Is Directly Proportional To ForceDocument11 pagesElasticity & Oscillations: Ut Tension, Sic Vis As Extension, So Force. Extension Is Directly Proportional To ForceJustin Paul VallinanNo ratings yet
- 4.DB Flats (1-7) & SMDB TypicalDocument9 pages4.DB Flats (1-7) & SMDB TypicalhpzenNo ratings yet
- Meca Mobilite Dev PDFDocument8 pagesMeca Mobilite Dev PDFAyoubNo ratings yet
- Brixton BX-125 Motorcycle User ManualDocument49 pagesBrixton BX-125 Motorcycle User ManualCARLOS GONZALEZNo ratings yet
- Peake and Tobak 3D SeparationDocument25 pagesPeake and Tobak 3D SeparationPablitox84No ratings yet