You might also like
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- CS60010: Deep Learning: Spring 2021Document18 pagesCS60010: Deep Learning: Spring 2021alokNo ratings yet
- TensorFlow in 1 Day: Make your own Neural NetworkFrom EverandTensorFlow in 1 Day: Make your own Neural NetworkRating: 4 out of 5 stars4/5 (8)
- AI - Physics Informed Neural Network by ARNAB HALDERDocument15 pagesAI - Physics Informed Neural Network by ARNAB HALDERARNAB HALDERNo ratings yet
- Lecture 4Document50 pagesLecture 4Rakshith KamathNo ratings yet
- 4 - DNN TipDocument52 pages4 - DNN TipJeffery ChiaNo ratings yet
- Unit 11-LSTM-CNNDocument72 pagesUnit 11-LSTM-CNN陳力熊No ratings yet
- Introduction to Neural Network Tutorial OneDocument14 pagesIntroduction to Neural Network Tutorial Onezhao lingerNo ratings yet
- Introduction To Neural Network: - CS 280 Tutorial OneDocument14 pagesIntroduction To Neural Network: - CS 280 Tutorial Onezhao lingerNo ratings yet
- Introduction To Neural Network: - CS 280 Tutorial OneDocument14 pagesIntroduction To Neural Network: - CS 280 Tutorial Onezhao lingerNo ratings yet
- DS NN 03 RNNDocument259 pagesDS NN 03 RNNAllice BoneteNo ratings yet
- Pattern Classification Neural Networks: Abdelmoniem Bayoumi, PHDDocument22 pagesPattern Classification Neural Networks: Abdelmoniem Bayoumi, PHDMostafa MohamedNo ratings yet
- RNN LSTMDocument42 pagesRNN LSTM21020641No ratings yet
- ANN1Document15 pagesANN1ARPIT SANJAY AVASARMOL R2566003No ratings yet
- Introduction To Neurons and Artificial Neural NetworksDocument34 pagesIntroduction To Neurons and Artificial Neural NetworksFahim MiddyaNo ratings yet
- Large Scale Deep LearningDocument170 pagesLarge Scale Deep Learningpavancreative81No ratings yet
- Chapter 4Document44 pagesChapter 4밥도둑No ratings yet
- Introduction to Neural NetworksDocument70 pagesIntroduction to Neural Networksmadhu shree mNo ratings yet
- DSP Final Exam Answers - 2017Document9 pagesDSP Final Exam Answers - 2017AbadiNo ratings yet
- Trebuie Sa Bag Asta UndevaDocument12 pagesTrebuie Sa Bag Asta UndevaAnton StefanNo ratings yet
- cs224n 2023 Lecture03 NeuralnetsDocument83 pagescs224n 2023 Lecture03 Neuralnetsmyturtle game01No ratings yet
- RNN and LSTMDocument15 pagesRNN and LSTMShreyas VaradkarNo ratings yet
- General ObservationDocument93 pagesGeneral ObservationRajaNo ratings yet
- Neutrosophic Quadruple Numbers, Refined Neutrosophic Quadruple Numbers, Absorbance Law, and The Multiplication of Neutrosophic Quadruple NumbersDocument3 pagesNeutrosophic Quadruple Numbers, Refined Neutrosophic Quadruple Numbers, Absorbance Law, and The Multiplication of Neutrosophic Quadruple NumbersScience DirectNo ratings yet
- 2024 MTH058 Lecture02 BackpropagationDocument62 pages2024 MTH058 Lecture02 BackpropagationMark MysteryNo ratings yet
- Iometrics: Ecture Ase Notions IngerprintsDocument26 pagesIometrics: Ecture Ase Notions IngerprintsRayyan HassanNo ratings yet
- 06 NeuralNetworksIIDocument41 pages06 NeuralNetworksIIBenNo ratings yet
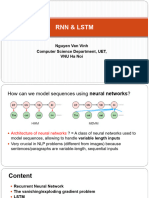
- RNN & LSTM: Nguyen Van Vinh Computer Science Department, UET, Vnu Ha NoiDocument35 pagesRNN & LSTM: Nguyen Van Vinh Computer Science Department, UET, Vnu Ha NoiKỉ Nguyên Hủy DiệtNo ratings yet
- 2. Neural NetworkDocument38 pages2. Neural NetworkLingesh K VNo ratings yet
- Lecture 08 On Neural Networks 1Document15 pagesLecture 08 On Neural Networks 1tudormihai0.1.2No ratings yet
- Back PropagationDocument37 pagesBack PropagationJoão LaconNo ratings yet
- Artificial Neural Network - Back-Propagation LearningDocument21 pagesArtificial Neural Network - Back-Propagation LearningArunima DoluiNo ratings yet
- 7 Deep LearningDocument75 pages7 Deep LearningSyed Hamza Ibrar GillaniNo ratings yet
- 03 NeuralNetworksI PDFDocument78 pages03 NeuralNetworksI PDFAjay KalalNo ratings yet
- Lecture Slides-Week13,14Document62 pagesLecture Slides-Week13,14moazzam kianiNo ratings yet
- CNN and Gan: Introduction ToDocument58 pagesCNN and Gan: Introduction ToGopiNath VelivelaNo ratings yet
- DEU CSC5045 Intelligent System Applications Using Fuzzy - 5+ANNDocument36 pagesDEU CSC5045 Intelligent System Applications Using Fuzzy - 5+ANNan7l7aNo ratings yet
- Building Blocks and Training of Artificial Neural NetworksDocument44 pagesBuilding Blocks and Training of Artificial Neural NetworksMuhammad Rizwan KhalidNo ratings yet
- Research paperFYPDocument8 pagesResearch paperFYPALI DEXTERNo ratings yet
- New Bridges Between Deep Learning and Partial Differential EquationsDocument5 pagesNew Bridges Between Deep Learning and Partial Differential EquationsAman JalanNo ratings yet
- Neural Network: Sudipta RoyDocument25 pagesNeural Network: Sudipta RoymanNo ratings yet
- NFGP Unit I Paavai (1)Document111 pagesNFGP Unit I Paavai (1)preetiNo ratings yet
- EEB441-511 LE05 CHXX Overview - Digital Control PDFDocument23 pagesEEB441-511 LE05 CHXX Overview - Digital Control PDFLoniel LuxNo ratings yet
- Neural Networks in MATLABDocument13 pagesNeural Networks in MATLABHugo BadilloNo ratings yet
- Artificial Neural NetworksDocument50 pagesArtificial Neural NetworksRiyujamalNo ratings yet
- Intro To Neural Nets PDFDocument29 pagesIntro To Neural Nets PDFjohnconnorNo ratings yet
- Machine Learning IntroductionDocument126 pagesMachine Learning IntroductionNandakumar NachimuthuNo ratings yet
- Deep Learning, Neural Networks and Kernel Machines: A Unifying FrameworkDocument98 pagesDeep Learning, Neural Networks and Kernel Machines: A Unifying FrameworkAdrian Ion-MargineanuNo ratings yet
- DSE DL Session 10 PDFDocument149 pagesDSE DL Session 10 PDFVARUN ARORANo ratings yet
- cs4811 ch11 Neural Networks PDFDocument32 pagescs4811 ch11 Neural Networks PDFSurya RoGanda SitungkirNo ratings yet
- Table 1. Properties of The Human Brain Together With ExamplesDocument4 pagesTable 1. Properties of The Human Brain Together With ExamplesmrtfkhangNo ratings yet
- Unit i IntroductionDocument68 pagesUnit i Introductionaditya092acNo ratings yet
- Lesson 1.3 Exponential and Logarithmic FunctionsDocument12 pagesLesson 1.3 Exponential and Logarithmic FunctionsmeisukeyumeNo ratings yet
- Solucion-Parcial-.. - Jupyter NotebookDocument11 pagesSolucion-Parcial-.. - Jupyter NotebookDaniel Alberto Peña DiazNo ratings yet
- Precept 6Document14 pagesPrecept 6Julia HinesNo ratings yet
- Learning: Book: Artificial Intelligence, A Modern Approach (Russell & Norvig)Document22 pagesLearning: Book: Artificial Intelligence, A Modern Approach (Russell & Norvig)Mustefa MohammedNo ratings yet
- Convolutional Neural Network Architecture - CNN ArchitectureDocument13 pagesConvolutional Neural Network Architecture - CNN ArchitectureRathi PriyaNo ratings yet
- Artificial Neural NetworksDocument21 pagesArtificial Neural NetworksTooba LiaquatNo ratings yet
- Lagrange Multipliers and Neutrosophic Nonlinear Programming Problems Constrained by Equality ConstraintsDocument7 pagesLagrange Multipliers and Neutrosophic Nonlinear Programming Problems Constrained by Equality ConstraintsScience DirectNo ratings yet
- Reflections on Subjects in the GAS Strand of Senior High SchoolDocument6 pagesReflections on Subjects in the GAS Strand of Senior High SchoolMark James Dela CruzNo ratings yet
- PBL - Fila ChartDocument6 pagesPBL - Fila ChartKynan ElliotNo ratings yet
- Class 3 Holiday Home Work NewDocument4 pagesClass 3 Holiday Home Work NewSaumyaNo ratings yet
- Education Challenges: Teaching at The Right Level (Tarl) in Resource-Limited SettingsDocument4 pagesEducation Challenges: Teaching at The Right Level (Tarl) in Resource-Limited SettingsFrolian FranceNo ratings yet
- Online Teaching in Writing by Using Means of Slack ApplicationDocument20 pagesOnline Teaching in Writing by Using Means of Slack Applicationfuji farinaNo ratings yet
- MIM AMC - DeepTech ENTREPRENEURSHIP - V2Document5 pagesMIM AMC - DeepTech ENTREPRENEURSHIP - V2MouadNo ratings yet
- Learner JournalDocument37 pagesLearner JournalFaizan Ahmed KhanNo ratings yet
- Eligibility For Special EducationDocument60 pagesEligibility For Special EducationharishrubikaNo ratings yet
- Laws On LearningDocument17 pagesLaws On LearningMark Angelo CalingNo ratings yet
- Didactic Planning - Innovations-Last OneDocument4 pagesDidactic Planning - Innovations-Last OneHQUIROS090No ratings yet
- Hard and Soft SkillsDocument3 pagesHard and Soft SkillsfatmafarahNo ratings yet
- Arrojo CasestudyfinalDocument19 pagesArrojo Casestudyfinalapi-447698563No ratings yet
- Ditan-Part 2 LTS - ProposalDocument4 pagesDitan-Part 2 LTS - ProposalReal AnNo ratings yet
- Biyani Bba HRD Notes PDFDocument57 pagesBiyani Bba HRD Notes PDFsunny rockyNo ratings yet
- DLL - Mathematics 1 - Q4 - W5Document5 pagesDLL - Mathematics 1 - Q4 - W5VIRTUCIO HANNAH JOYNo ratings yet
- BPKM English Term 1 - Primary Healthcare System - 2019-2020Document95 pagesBPKM English Term 1 - Primary Healthcare System - 2019-2020Melati ArienaNo ratings yet
- English: Quarter 4 - Module 6: Writing News ReportDocument21 pagesEnglish: Quarter 4 - Module 6: Writing News ReportGeoff Rey50% (4)
- Ipcr-Development PlanDocument3 pagesIpcr-Development PlanShiela Mae Dosol100% (1)
- Master Cadet LogbookDocument120 pagesMaster Cadet Logbookdvtherion100% (1)
- Educational Philosophy Questionnaire: NameDocument2 pagesEducational Philosophy Questionnaire: NameNuwaira BalochNo ratings yet
- Apple Tree Formative AssessmentDocument4 pagesApple Tree Formative Assessmentapi-484375132No ratings yet
- Sociocultural TheoryDocument23 pagesSociocultural TheoryVangie G Avila100% (1)
- Translation Equivalence Vs Translation Equivalents Quantifying Lexical and Syntactic Examples of Japanese EnglishDocument12 pagesTranslation Equivalence Vs Translation Equivalents Quantifying Lexical and Syntactic Examples of Japanese EnglishM ZainalNo ratings yet
- DLL-SCIENCE 10-3rd QUARTER-MOD1 PART 1Document4 pagesDLL-SCIENCE 10-3rd QUARTER-MOD1 PART 1Daimon DanteNo ratings yet
- Pe 1 4TH QuarterDocument31 pagesPe 1 4TH QuarterGenesis Terana-PerezNo ratings yet
- Lesson Plan 2: Part I: Define Goal For The LessonDocument6 pagesLesson Plan 2: Part I: Define Goal For The Lessonapi-445284664No ratings yet
- Gym Log Book TitleDocument11 pagesGym Log Book TitleRumSup MusNo ratings yet
- Lesson 4.2 Implementing A Curriculum Daily in The ClassroomsDocument3 pagesLesson 4.2 Implementing A Curriculum Daily in The ClassroomsJervyn GuiananNo ratings yet
- 21st Century AssessmentDocument39 pages21st Century AssessmentJune HemNo ratings yet
- 2C-2I-1R Reflective ApproachDocument12 pages2C-2I-1R Reflective ApproachLorefe Delos SantosNo ratings yet