You might also like
- Radial Basis Networks: Fundamentals and Applications for The Activation Functions of Artificial Neural NetworksFrom EverandRadial Basis Networks: Fundamentals and Applications for The Activation Functions of Artificial Neural NetworksNo ratings yet
- Cartesian Nonlinear Model Predictive Control of Redundant Manipulators Considering ObstaclesDocument6 pagesCartesian Nonlinear Model Predictive Control of Redundant Manipulators Considering ObstaclesSHISHIR CHANDRA DAS 1809019No ratings yet
- Robot Time Optimal Trajectory Planning Based On Improved Simplified Particle Swarm Optimization AlgorithmDocument13 pagesRobot Time Optimal Trajectory Planning Based On Improved Simplified Particle Swarm Optimization AlgorithmMohamed Bensaadallah100% (1)
- Sampling Based Robot Motion Planning: Dept. of Ece, Bgsit 2015page 1Document20 pagesSampling Based Robot Motion Planning: Dept. of Ece, Bgsit 2015page 1punithNo ratings yet
- Wen 2021Document11 pagesWen 2021Felipe IgnazioNo ratings yet
- Priority Scheduling Based Dynamic Path Planning System With Motion FeedbackDocument5 pagesPriority Scheduling Based Dynamic Path Planning System With Motion FeedbackIamIam If IamNotNo ratings yet
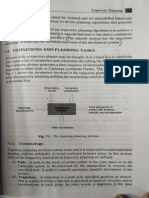
- Definitions and Planning Tasks: Tobegin With, A Trajectory Planner May Be Thought of As A Black Box To Which TheDocument7 pagesDefinitions and Planning Tasks: Tobegin With, A Trajectory Planner May Be Thought of As A Black Box To Which The20131A5327 KONDETI SHIVA NARASIMHANo ratings yet
- Kim 1985Document11 pagesKim 1985Trịnh Đàm NhânNo ratings yet
- Performance Bounds For Cooperative Simultaneous Localization and Mapping (C-SLAM)Document8 pagesPerformance Bounds For Cooperative Simultaneous Localization and Mapping (C-SLAM)MahmoudAbdulGalilNo ratings yet
- ICMIEE 2020 Performance AtlasesDocument6 pagesICMIEE 2020 Performance Atlaseselias muñozNo ratings yet
- An Experimental Study On Vision Based Controlling of A Spherical Rolling RobotDocument5 pagesAn Experimental Study On Vision Based Controlling of A Spherical Rolling RobotChristian MarpaungNo ratings yet
- A Dual Quaternion Linear-Quadratic Optimal Controller For Trajectory TrackingDocument6 pagesA Dual Quaternion Linear-Quadratic Optimal Controller For Trajectory TrackingGerardo HernándezNo ratings yet
- Applsci 14 00025 v2Document16 pagesApplsci 14 00025 v2faith_khp73301No ratings yet
- Planning For Manipulation With Adaptive Motion PrimitivesDocument8 pagesPlanning For Manipulation With Adaptive Motion Primitivesbencohen2No ratings yet
- Research Article: An Improved Method of Particle Swarm Optimization For Path Planning of Mobile RobotDocument12 pagesResearch Article: An Improved Method of Particle Swarm Optimization For Path Planning of Mobile Robotmarcio pivelloNo ratings yet
- Chapter 5: ConclusionDocument6 pagesChapter 5: ConclusionMuhammad Danial DanialNo ratings yet
- Obtaining Adjacent Configurations With Minimum Time Considering Robot Dynamics Using Genetic AlgorithmDocument6 pagesObtaining Adjacent Configurations With Minimum Time Considering Robot Dynamics Using Genetic AlgorithmFares Abu-DakkaNo ratings yet
- Using PSO 2Document6 pagesUsing PSO 2smkumaran90No ratings yet
- A New Method For Smooth Trajectory Planning of Robot ManipulatorsDocument17 pagesA New Method For Smooth Trajectory Planning of Robot Manipulatorswanglei2112221990No ratings yet
- SlamDocument11 pagesSlamulisesNo ratings yet
- Difference Between DWA and TEB Local PlannersDocument2 pagesDifference Between DWA and TEB Local PlannersChandrajit GangulyNo ratings yet
- Speed Regulation in 3D Robotic Walking Through Motion Transitions Between Human-Inspired Partial Hybrid Zero DynamicsDocument8 pagesSpeed Regulation in 3D Robotic Walking Through Motion Transitions Between Human-Inspired Partial Hybrid Zero DynamicsFhatarani Hasya AdilaNo ratings yet
- An Overview-Mobile Robot Path Planning NCETEMT-2021 - Paper - 152Document4 pagesAn Overview-Mobile Robot Path Planning NCETEMT-2021 - Paper - 152Vesag nNo ratings yet
- Howard Kelly 2007 Optimal Rough Terrain Trajectory Generation For Wheeled Mobile RobotsDocument26 pagesHoward Kelly 2007 Optimal Rough Terrain Trajectory Generation For Wheeled Mobile RobotsAaronNo ratings yet
- Inverse Kinematics of Redundant Robots Using Genetic AlgorithmsDocument6 pagesInverse Kinematics of Redundant Robots Using Genetic AlgorithmskraskromNo ratings yet
- Ci 8Document12 pagesCi 8Thanh DatNo ratings yet
- Voronoi Diagram, Dynamic Path PlanningDocument4 pagesVoronoi Diagram, Dynamic Path PlanningrakeluvNo ratings yet
- Level Set Based Path Planning Using A Novel Path Optimization Algorithm For RobotsDocument8 pagesLevel Set Based Path Planning Using A Novel Path Optimization Algorithm For RobotsBhagya PatilNo ratings yet
- Tracking of Multi Moving Targets Using The Simplified Artificial Potential Field ControllerDocument9 pagesTracking of Multi Moving Targets Using The Simplified Artificial Potential Field ControllerJournal of Computer Science and EngineeringNo ratings yet
- Trajectory Optimization Using Learning From Demonstration With Meta-Heuristic Grey Wolf AlgorithmDocument15 pagesTrajectory Optimization Using Learning From Demonstration With Meta-Heuristic Grey Wolf AlgorithmIAES International Journal of Robotics and AutomationNo ratings yet
- Landing Route Planning Method For Micro Drones Based On HybridDocument5 pagesLanding Route Planning Method For Micro Drones Based On HybridGhalidh ChoirNo ratings yet
- Energies: FPGA Implementation of Homotopic Path Planning Method With Automatic Assignment of Repulsion ParameterDocument31 pagesEnergies: FPGA Implementation of Homotopic Path Planning Method With Automatic Assignment of Repulsion ParameterMario CalderonNo ratings yet
- An Online Coverage Path Planning Method For Sweeper Trucks in Dynamic EnvironmentsDocument8 pagesAn Online Coverage Path Planning Method For Sweeper Trucks in Dynamic EnvironmentsBo ChenNo ratings yet
- A Review of Global Path Planning Methods For Occupancy Grid Maps Regardless of Obstacle DensityDocument30 pagesA Review of Global Path Planning Methods For Occupancy Grid Maps Regardless of Obstacle DensityAbdessamed BelhadjNo ratings yet
- Planning For Manipulation With Adaptive Motion PrimitivesDocument8 pagesPlanning For Manipulation With Adaptive Motion PrimitivesTales MarquesNo ratings yet
- Multi-Robot Informative Path Planning Using A Leader-Follower ArchitectureDocument7 pagesMulti-Robot Informative Path Planning Using A Leader-Follower Architecturegfdsal878No ratings yet
- Proceedings of The 9th WSEAS International Conference On APPLICATIONS of ELECTRICAL ENGINEERINGDocument7 pagesProceedings of The 9th WSEAS International Conference On APPLICATIONS of ELECTRICAL ENGINEERINGIbrahim SadohNo ratings yet
- Dynamic Robot Path Planning Using An Enhanced Simulated Annealing Approach 2013 Applied Mathematics and ComputationDocument18 pagesDynamic Robot Path Planning Using An Enhanced Simulated Annealing Approach 2013 Applied Mathematics and Computationsmkumaran90No ratings yet
- Formulation and Optimization of Cubic Polynomial Joint Trajectories For Industrial RobotsDocument9 pagesFormulation and Optimization of Cubic Polynomial Joint Trajectories For Industrial Robotswanglei2112221990100% (1)
- Flexible Model Predictive Control Based On MultivaDocument15 pagesFlexible Model Predictive Control Based On MultivaangelNo ratings yet
- Hassan 2017Document10 pagesHassan 2017miucce.comNo ratings yet
- Robotic ManipulatorsDocument4 pagesRobotic Manipulatorsshaik roshanNo ratings yet
- Icas 2011 5 40 20078 PDFDocument5 pagesIcas 2011 5 40 20078 PDFKetan RsNo ratings yet
- Average Case Constant Factor Time and Distance Optimal Multi-Robot Path Planning in Well-Connected EnvironmentsDocument16 pagesAverage Case Constant Factor Time and Distance Optimal Multi-Robot Path Planning in Well-Connected EnvironmentsjayaheNo ratings yet
- Paper 12Document5 pagesPaper 12api-282905843No ratings yet
- A General Robot Inverse Kinematics Solution Method Based On Improved PSO AlgorithmDocument10 pagesA General Robot Inverse Kinematics Solution Method Based On Improved PSO Algorithmgovind raoNo ratings yet
- The Inverse Solution of Dexterous Robot by Using Neural NetworksDocument11 pagesThe Inverse Solution of Dexterous Robot by Using Neural Networksbahaa03No ratings yet
- Richter 2016Document18 pagesRichter 2016Dedy BehiNo ratings yet
- Modelling of Robotic Single Peg-In-Hole Assembly UDocument12 pagesModelling of Robotic Single Peg-In-Hole Assembly UMohammed AamerNo ratings yet
- GR 7 - 2006 - IEEE T-Sys-Man-Cyber-B - Rendezvous-Guidance Trajectory Planning For Robotic Dynamic Obstacle Avoidance and InterceptionDocument10 pagesGR 7 - 2006 - IEEE T-Sys-Man-Cyber-B - Rendezvous-Guidance Trajectory Planning For Robotic Dynamic Obstacle Avoidance and InterceptionRISHABH JAMBHULKARNo ratings yet
- Howard Thomas 2007 1Document20 pagesHoward Thomas 2007 1Suresh KumarNo ratings yet
- Robot 6 DofDocument5 pagesRobot 6 DofMiguel PérezNo ratings yet
- Icra 2010Document6 pagesIcra 2010farhadNo ratings yet
- Research Article: A New Artificial Neural Network Approach in Solving Inverse Kinematics of Robotic Arm (Denso VP6242)Document10 pagesResearch Article: A New Artificial Neural Network Approach in Solving Inverse Kinematics of Robotic Arm (Denso VP6242)Marks Calderon NiquinNo ratings yet
- 090 Robot Trajectory Generation enDocument50 pages090 Robot Trajectory Generation enbaboiu electricNo ratings yet
- A Method For Optimal Kinematic Design of Five-Bar Planar Parallel Manipulators - ProceedingDocument5 pagesA Method For Optimal Kinematic Design of Five-Bar Planar Parallel Manipulators - ProceedingHải Đăng ĐỗNo ratings yet
- New Potential Functions For Multi Robot Path Planning - SWARM or SPREADDocument5 pagesNew Potential Functions For Multi Robot Path Planning - SWARM or SPREADShridhar DodamaniNo ratings yet
- An Overview of Autonomous Mobile Robot Path Planning AlgorithmsDocument7 pagesAn Overview of Autonomous Mobile Robot Path Planning AlgorithmsWilberFabiánNo ratings yet
- Airspace Sector Redesign Based On VoronoiDocument15 pagesAirspace Sector Redesign Based On Voronoiodic2002No ratings yet
- Lubich C (2) - RK Theory For Volterra Integrodifferential Equations (NumMat, 1982)Document17 pagesLubich C (2) - RK Theory For Volterra Integrodifferential Equations (NumMat, 1982)Александр ЛобаскинNo ratings yet
- K MapDocument9 pagesK MapKamal PhyNo ratings yet
- Chapter 3 Writing Within The Disciplines PDFDocument42 pagesChapter 3 Writing Within The Disciplines PDFRayzel Rubio Ramirez100% (2)
- Shapiro-1996Document26 pagesShapiro-1996Catherin GironNo ratings yet
- Elements of Complex AnalysisDocument62 pagesElements of Complex AnalysisNaledi xuluNo ratings yet
- Introduction To Quadratic EquationsDocument32 pagesIntroduction To Quadratic EquationsChrisnaliam FelisildaNo ratings yet
- 3rd Grade Number WorksheetDocument35 pages3rd Grade Number WorksheetNel Retana SorapacNo ratings yet
- CSE Reg PCKG Fall 22Document7 pagesCSE Reg PCKG Fall 22Dark PrinceNo ratings yet
- 1977-Foschi-Analysis of Wood Diaphragms and Trusses - Part I DiaphragmsDocument8 pages1977-Foschi-Analysis of Wood Diaphragms and Trusses - Part I DiaphragmsJuan AlemanNo ratings yet
- KMNS - 2223 - Pre PSPM SM015 - Set 3Document4 pagesKMNS - 2223 - Pre PSPM SM015 - Set 3Nur ZuhayraNo ratings yet
- MiniProject Assignment 3Document3 pagesMiniProject Assignment 3Asadullah ChoudharyNo ratings yet
- McGill MATH - 133Document1 pageMcGill MATH - 133RafaNo ratings yet
- A Class of Hankel ConvolutionsDocument17 pagesA Class of Hankel ConvolutionsLouis DoroteoNo ratings yet
- Sgantzos K Ga-Hscbb17Document7 pagesSgantzos K Ga-Hscbb17floorman67No ratings yet
- Detailed Lesson Plan-Parallel & Perpendecular LinesDocument4 pagesDetailed Lesson Plan-Parallel & Perpendecular LinesFrances Bert BalajadiaNo ratings yet
- ADVANCED MATHEM WPS OfficeDocument24 pagesADVANCED MATHEM WPS OfficeBryan NazarroNo ratings yet
- Naivebayes TuteDocument4 pagesNaivebayes TuteAmit ChandakNo ratings yet
- 4MB0 01 Que 20190110Document20 pages4MB0 01 Que 20190110Farbeen MirzaNo ratings yet
- RSA AlgorithmDocument22 pagesRSA AlgorithmmathpalsonuNo ratings yet
- Modelos Lineales Generalizados Con Ejemplos en RDocument573 pagesModelos Lineales Generalizados Con Ejemplos en RJuan Manuel AntónNo ratings yet
- Introduction To AgdaDocument46 pagesIntroduction To Agdaglaufan100% (1)
- CH 10Document36 pagesCH 10LeonardoMadeira11100% (1)
- 3 To 8 Decoder Using Two 2 To 8 DecoderDocument14 pages3 To 8 Decoder Using Two 2 To 8 DecoderBineilKcThapa100% (1)
- A LESSON PLAN For Pythagorean TheoremDocument9 pagesA LESSON PLAN For Pythagorean TheoremColeen SchrimeathNo ratings yet
- Measures of Central TendencyDocument32 pagesMeasures of Central TendencyJanainah Diamla SaripadaNo ratings yet
- TRIGONOMETRYDocument147 pagesTRIGONOMETRYAdriano Mercedes Jr. CanoNo ratings yet
- Helmut Bez, Tony Croft - Quantum Computation-CRC Press - Chapman & Hall (2023)Document392 pagesHelmut Bez, Tony Croft - Quantum Computation-CRC Press - Chapman & Hall (2023)kaldrogo2201No ratings yet
- Scientific Work PlaceDocument551 pagesScientific Work Placepeloton10No ratings yet
- Xxxii Brazilian Math Olympiad 2010: (Page 1)Document33 pagesXxxii Brazilian Math Olympiad 2010: (Page 1)sohrabNo ratings yet
- Review of Related LiteratureDocument4 pagesReview of Related LiteratureJennelManaloNo ratings yet
- CATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchFrom EverandCATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchRating: 4 out of 5 stars4/5 (10)
- AutoCAD 2010 Tutorial Series: Drawing Dimensions, Elevations and SectionsFrom EverandAutoCAD 2010 Tutorial Series: Drawing Dimensions, Elevations and SectionsNo ratings yet
- Certified Solidworks Professional Advanced Weldments Exam PreparationFrom EverandCertified Solidworks Professional Advanced Weldments Exam PreparationRating: 5 out of 5 stars5/5 (1)
- Product Manufacturing and Cost Estimating using CAD/CAE: The Computer Aided Engineering Design SeriesFrom EverandProduct Manufacturing and Cost Estimating using CAD/CAE: The Computer Aided Engineering Design SeriesRating: 4 out of 5 stars4/5 (4)