You might also like
- A Self-Sustaining Electric Generator - Orgone Flux CapacitorDocument9 pagesA Self-Sustaining Electric Generator - Orgone Flux Capacitor1357531100% (2)
- Diagrama S-50 Ddec IV My 2003 Egr Engine Sensor HarnessDocument1 pageDiagrama S-50 Ddec IV My 2003 Egr Engine Sensor HarnessObed bracamontesNo ratings yet
- Heidenhain Itnc 530 Din IsoDocument675 pagesHeidenhain Itnc 530 Din IsoHoho Hahov0% (1)
- Seimens 840DDocument666 pagesSeimens 840DSuresh Rajagopal100% (1)
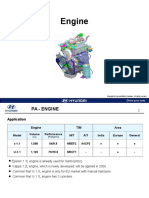
- Engine PADocument49 pagesEngine PAlartsim115No ratings yet
- Urun KataloguDocument17 pagesUrun KataloguHaroun Al RachidNo ratings yet
- Leadwell V3DF0IM2Document156 pagesLeadwell V3DF0IM2Эдуард Соловьев100% (1)
- Safety - Msr131rtpDocument2 pagesSafety - Msr131rtpJose Hilario Rivera RezaNo ratings yet
- Specification Arburg Allrounder 570c Golden EditionDocument6 pagesSpecification Arburg Allrounder 570c Golden EditionsygabrielaNo ratings yet
- Parts ListDocument52 pagesParts Listsalomonferrer3502No ratings yet
- Flatbed Screen Printing Machine ManualDocument12 pagesFlatbed Screen Printing Machine ManualGerardo BoisNo ratings yet
- Click PLC CommunicationDocument40 pagesClick PLC Communicationobinnabenedict100% (1)
- ATA33 Lights: B737-600/700/800/900 (CFM56)Document201 pagesATA33 Lights: B737-600/700/800/900 (CFM56)d xhNo ratings yet
- Product Data Sheet: Capacitor Bank 300 kVARDocument3 pagesProduct Data Sheet: Capacitor Bank 300 kVARgilang100% (1)
- Arburg370&420C PDFDocument8 pagesArburg370&420C PDFMatoa Papeda0% (1)
- All-Electric Small-Sized Injection Molding Machine: Sumitomo Global NetworkDocument8 pagesAll-Electric Small-Sized Injection Molding Machine: Sumitomo Global NetworkRusmana Syamil0% (1)
- Seats With Memory RetrofitDocument19 pagesSeats With Memory RetrofitEdi NicolauNo ratings yet
- Millac 4VA Ladder DiagramDocument11 pagesMillac 4VA Ladder DiagramsunhuynhNo ratings yet
- DC School Text Book: Setting Method of ToscastDocument43 pagesDC School Text Book: Setting Method of ToscastmikeNo ratings yet
- CDC 2000 EngDocument208 pagesCDC 2000 Engabdulrahim_moussaNo ratings yet
- 3 M 710ic Series DatasheetDocument4 pages3 M 710ic Series DatasheetBruno BrekaloNo ratings yet
- Engel Service Manual - Machine: Serial No.: 167521 VC 750/150 TECHDocument164 pagesEngel Service Manual - Machine: Serial No.: 167521 VC 750/150 TECHЖеня Драчук100% (3)
- BA-960003142-EN Presse USP3000 - 4700E-100 - 80-XDocument81 pagesBA-960003142-EN Presse USP3000 - 4700E-100 - 80-XBob DavisNo ratings yet
- EN-G 11 401 1 11-2007-01-05 0926 Tdo1 PDFDocument246 pagesEN-G 11 401 1 11-2007-01-05 0926 Tdo1 PDFbuburuzazboaraNo ratings yet
- 4 - Walls, Doors, Windows - CeilingsDocument19 pages4 - Walls, Doors, Windows - CeilingsAnderson GuerraNo ratings yet
- ENGEL Automation en PDFDocument15 pagesENGEL Automation en PDFSreedhar PugalendhiNo ratings yet
- Emco Winnc Heidenhain TNC 426 Conversational The Emco Winnc Heidenhain TNC 426Document282 pagesEmco Winnc Heidenhain TNC 426 Conversational The Emco Winnc Heidenhain TNC 426AyoubNo ratings yet
- Double Peoria ScoringDocument1 pageDouble Peoria ScoringvpunNo ratings yet
- Memory Upgrade For Fanuc 10Document3 pagesMemory Upgrade For Fanuc 10mtcalirezaNo ratings yet
- ENGEL Flomo E-Flomo EN Short ROM PDFDocument11 pagesENGEL Flomo E-Flomo EN Short ROM PDFMarius Vaida100% (1)
- Z Plano Electrico e Hidraulico PDFDocument52 pagesZ Plano Electrico e Hidraulico PDFmacv61188No ratings yet
- Regloplas RT50 Controller Manual PDFDocument28 pagesRegloplas RT50 Controller Manual PDFalso strong and durableNo ratings yet
- Pneumobot: Sprue Picker RobotDocument37 pagesPneumobot: Sprue Picker RobotAlfandel VillamartinNo ratings yet
- CNC Programming Handbook 2nd Edition by Peter Smid PDFDocument529 pagesCNC Programming Handbook 2nd Edition by Peter Smid PDFunknown unexplainedNo ratings yet
- Tai Mex by Tederic D SeriesDocument13 pagesTai Mex by Tederic D SeriesPHYONEGRIPNo ratings yet
- SINUMERIKDocument39 pagesSINUMERIKRavi KumarNo ratings yet
- Fundamentals of Electric CircuitsDocument7 pagesFundamentals of Electric CircuitsHiếu DươngNo ratings yet
- Angle Valve and Tap Assembly and Leak Test MachineDocument7 pagesAngle Valve and Tap Assembly and Leak Test MachineJimmy KingNo ratings yet
- S 2000ib Data Sheet PDFDocument29 pagesS 2000ib Data Sheet PDFAkshay B100% (2)
- Pneumatic Gap Frame Single Point Press JH21-125, 160 TDocument14 pagesPneumatic Gap Frame Single Point Press JH21-125, 160 TNaukowyDrpNo ratings yet
- MP513ENDocument132 pagesMP513ENAnonymous H3I29yjNo ratings yet
- Citizen B12VIDocument4 pagesCitizen B12VIIonut-Catalin DimacheNo ratings yet
- Drymax E Battery en V1 4Document59 pagesDrymax E Battery en V1 4bschmaltzy1No ratings yet
- TD El-Exis SP EnglischDocument60 pagesTD El-Exis SP EnglischJuan Angel CamposNo ratings yet
- Jucrank enDocument8 pagesJucrank enAlex KascutNo ratings yet
- Operation Manual: Vertical Machining CenterDocument27 pagesOperation Manual: Vertical Machining CenterAmauriGarciaNo ratings yet
- Ultra High Speed and Compact: Application ExamplesDocument4 pagesUltra High Speed and Compact: Application ExamplesEsteban Angel MatamorosNo ratings yet
- IMM BR IR enDocument13 pagesIMM BR IR enwatnaNo ratings yet
- Smart Power User Manual PDFDocument1,030 pagesSmart Power User Manual PDFAntonio Lucas100% (4)
- EUROMAP 62 v1 7Document7 pagesEUROMAP 62 v1 7grufNo ratings yet
- 5 KEBA Standard ProtocolDocument50 pages5 KEBA Standard Protocoldedy250591No ratings yet
- Sidel Matriz Parte 2Document250 pagesSidel Matriz Parte 2Fernando RosaNo ratings yet
- Arburg Allrounder 570s Multi-Component TD 680169 en GBDocument16 pagesArburg Allrounder 570s Multi-Component TD 680169 en GBEko Prastyo100% (1)
- Rechner s10 268 553 01 Heidenhain ManualDocument752 pagesRechner s10 268 553 01 Heidenhain ManualDaniel SchuchNo ratings yet
- M800 M80 E80 C80 Programming Manual Machining Center SystemDocument1,072 pagesM800 M80 E80 C80 Programming Manual Machining Center SystemJosimarNo ratings yet
- DRIVE CLiQ ConnectionDocument1 pageDRIVE CLiQ ConnectionAnh HoàngNo ratings yet
- RANGER 5 AXIS ROBOT OPERATIONS MANUAL AB VERSION REV 2.7 EuroDocument87 pagesRANGER 5 AXIS ROBOT OPERATIONS MANUAL AB VERSION REV 2.7 EuroErnie Sergejenko0% (1)
- Nabtesco PDFDocument138 pagesNabtesco PDFRoger MorescoNo ratings yet
- Basickit Robacta Drive CMT Tpsi: / Perfect Charging / / Solar EnergyDocument8 pagesBasickit Robacta Drive CMT Tpsi: / Perfect Charging / / Solar Energyseham qafesheh100% (1)
- 5 Phase Stepper Motor Catalog - PF SeriesDocument5 pages5 Phase Stepper Motor Catalog - PF SeriesTran Tien DatNo ratings yet
- Siemense CNC 48SP2Document19 pagesSiemense CNC 48SP2Xaoc KabataNo ratings yet
- Wire EDM Components For:: Brand Machine ToolsDocument15 pagesWire EDM Components For:: Brand Machine ToolsHossein VahediNo ratings yet
- Hot Runner KEBA2580 220VDocument19 pagesHot Runner KEBA2580 220VAarón DíazNo ratings yet
- Syntec InfoDocument14 pagesSyntec InfoGeorgi HelyanNo ratings yet
- Electronic Control Module (Power Train)Document8 pagesElectronic Control Module (Power Train)Iginio Malaver VargasNo ratings yet
- CNC Lathe Control PanelDocument9 pagesCNC Lathe Control PanelLuiz Pimentel100% (1)
- Electronic Control Module (Power Train) : Arrêter SIS Ecran PrécédentDocument4 pagesElectronic Control Module (Power Train) : Arrêter SIS Ecran Précédentamskroud brahimNo ratings yet
- 2019 Color Light Box Price ListDocument1 page2019 Color Light Box Price ListGerardo BoisNo ratings yet
- CO-4BAY-UV CE EMC Report LCS200415090AEDocument52 pagesCO-4BAY-UV CE EMC Report LCS200415090AEGerardo BoisNo ratings yet
- 2019 Distributor Price List of 3nh Colorimeter - 10 PcsDocument1 page2019 Distributor Price List of 3nh Colorimeter - 10 PcsGerardo BoisNo ratings yet
- CAT B - NetworkDocument4 pagesCAT B - NetworkGerardo BoisNo ratings yet
- MANUAL For IONIZING AIR BARDocument11 pagesMANUAL For IONIZING AIR BARGerardo BoisNo ratings yet
- Fengtai Inspection Report Wicket Dryer 2962767Document13 pagesFengtai Inspection Report Wicket Dryer 2962767Gerardo BoisNo ratings yet
- Ruida ND2565 Tunnel Dryer MachineDocument2 pagesRuida ND2565 Tunnel Dryer MachineGerardo BoisNo ratings yet
- Detail of Facts That Conducts Us To A Refund Request: We Already Sent PicturesDocument3 pagesDetail of Facts That Conducts Us To A Refund Request: We Already Sent PicturesGerardo BoisNo ratings yet
- Dongguan Ruida Machinery and Equipment CO., LTD. Newman Industry Co., LTDDocument2 pagesDongguan Ruida Machinery and Equipment CO., LTD. Newman Industry Co., LTDGerardo BoisNo ratings yet
- Compresores A TornilloDocument10 pagesCompresores A TornilloGerardo Bois100% (1)
- Urh-Air Purifier CataloDocument10 pagesUrh-Air Purifier CataloGerardo BoisNo ratings yet
- Listprice 07 11Document1,797 pagesListprice 07 11Tejano RockNo ratings yet
- SGIM-3268H - GMI Breaker PDFDocument52 pagesSGIM-3268H - GMI Breaker PDFJavi MosqueraNo ratings yet
- Strowger SwitchDocument14 pagesStrowger Switchjeet259No ratings yet
- Boq For Tyco RoofDocument3 pagesBoq For Tyco Roofragu ramanNo ratings yet
- C & S Detail ScheduleDocument1 pageC & S Detail SchedulePoru ManNo ratings yet
- Index of Code LockDocument7 pagesIndex of Code LockChirag MistryNo ratings yet
- ADX125 ManualDocument31 pagesADX125 ManualMehmet Çağatay KayalıNo ratings yet
- Electrical AttributesDocument8 pagesElectrical AttributesArturo RamirezNo ratings yet
- BccontDocument78 pagesBccontIonut GrozaNo ratings yet
- SecoGear Cat Final2Document22 pagesSecoGear Cat Final2Eulalio HortaNo ratings yet
- Material SpecificationDocument3 pagesMaterial SpecificationDan Czar T. JuanNo ratings yet
- 2008 Commercial Electrical Q & ADocument21 pages2008 Commercial Electrical Q & ASasiNo ratings yet
- K OfeiDocument20 pagesK OfeiPaaforiNo ratings yet
- ABB Emax Power BreakersDocument63 pagesABB Emax Power Breakerskpr_02161371No ratings yet
- Diesel Generator Set KTA50 Series Engine - Cummins Inc.Document4 pagesDiesel Generator Set KTA50 Series Engine - Cummins Inc.Eddie GiamNo ratings yet
- Agn102 BDocument21 pagesAgn102 Bariwibowo100% (1)
- Abbreviations: S.No - Abbreviation FullformDocument1 pageAbbreviations: S.No - Abbreviation FullformDon RajuNo ratings yet
- Curtis-1211 (Manual) 06cDocument46 pagesCurtis-1211 (Manual) 06cSANOMIONo ratings yet
- Quintessence Round - The System Solution For Excellent Visual ComfortDocument5 pagesQuintessence Round - The System Solution For Excellent Visual ComfortAbdelrahman HassanNo ratings yet
- L806 WCH Series Wind Cone FrangibleDocument5 pagesL806 WCH Series Wind Cone FrangibleAgung FitrillaNo ratings yet
- Milgard - Trip Summary Report (POD) : Trip Delivery Order Number Line No Item Description Rejected LPNDocument3 pagesMilgard - Trip Summary Report (POD) : Trip Delivery Order Number Line No Item Description Rejected LPNalla.kishoreNo ratings yet
- Welcome To EE 130/230M Integrated Circuit DevicesDocument11 pagesWelcome To EE 130/230M Integrated Circuit Devicesnithin UppalapatiNo ratings yet