You might also like
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11From EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11No ratings yet
- Quaccs Scientific Python Module HandoutDocument6 pagesQuaccs Scientific Python Module HandoutDeborah CrittendenNo ratings yet
- Chaotic Oscillations in Delayed-Feedback Electronic OscillatorsDocument5 pagesChaotic Oscillations in Delayed-Feedback Electronic OscillatorsGeraud Russel Goune ChenguiNo ratings yet
- Nonlinear HammDocument77 pagesNonlinear HammyowhatsuptNo ratings yet
- Quantum Mechanics Guide - Advanced Topics in Quantum MechanicsDocument63 pagesQuantum Mechanics Guide - Advanced Topics in Quantum MechanicsPhilip RuijtenNo ratings yet
- The Rigorous Derivation of The Linear Landau Equation From A Particle System in A Weak-Coupling LimitDocument66 pagesThe Rigorous Derivation of The Linear Landau Equation From A Particle System in A Weak-Coupling LimitCroco AliNo ratings yet
- Subleading Corrections To The Double Coset Ansatz Preserve IntegrabilityDocument40 pagesSubleading Corrections To The Double Coset Ansatz Preserve IntegrabilitycrocoaliNo ratings yet
- Teorija elementarnih čestica i fundamentalne simetrijeDocument115 pagesTeorija elementarnih čestica i fundamentalne simetrijephysicNo ratings yet
- 2Document33 pages2Anonymous 2xjDjAcZ100% (1)
- Basics of LC Oscillators: Excerpted From "The Designer's Guide To High-Purity Oscillators" by Hegazi, Rael, and AbidiDocument9 pagesBasics of LC Oscillators: Excerpted From "The Designer's Guide To High-Purity Oscillators" by Hegazi, Rael, and Abidiamr khaledNo ratings yet
- Nonlinear System Analysis and ControlDocument88 pagesNonlinear System Analysis and ControlElvis TsangNo ratings yet
- ME 406 The Van Der Pol Oscillator: 1. IntroductionDocument15 pagesME 406 The Van Der Pol Oscillator: 1. IntroductionIsuck91No ratings yet
- Damped Driven PendulumDocument30 pagesDamped Driven PendulumViren BansalNo ratings yet
- In StantonsDocument63 pagesIn StantonsSrinivas Rau100% (1)
- Modal AnalysisDocument43 pagesModal AnalysisAhmed Ibrahim100% (1)
- Study of Rotor-Bearing Systems Using Campbell DiagramDocument4 pagesStudy of Rotor-Bearing Systems Using Campbell DiagrammishraenggNo ratings yet
- Non Classical StatesDocument21 pagesNon Classical StatesSebastian HambschNo ratings yet
- Analysis of The Van Der Pol's Oscillator: Dhrubajyoti BiswasDocument24 pagesAnalysis of The Van Der Pol's Oscillator: Dhrubajyoti BiswasDhrubajyoti BiswasNo ratings yet
- Tyche Manual: Salvatore CardamoneDocument15 pagesTyche Manual: Salvatore CardamonesavvvvvvvvvvyNo ratings yet
- Matrix AnalysisDocument143 pagesMatrix AnalysisjosecheoxNo ratings yet
- NlsDocument23 pagesNlsthanh910No ratings yet
- Fundamentals of Molecular Integrals EvaluationDocument37 pagesFundamentals of Molecular Integrals EvaluationMarko MitićNo ratings yet
- Spectra and Pseudospectra of Waveform Relaxation OperatorsDocument19 pagesSpectra and Pseudospectra of Waveform Relaxation OperatorsShalini GuptaNo ratings yet
- Mode Locked Laser PDFDocument7 pagesMode Locked Laser PDFmenguemengueNo ratings yet
- Quantum Statistics in Optics and Solid-State Physics - Graham, HaakeDocument90 pagesQuantum Statistics in Optics and Solid-State Physics - Graham, HaakeCristian LunguNo ratings yet
- Applications of Symmetry and Group Theory (Artigo)Document22 pagesApplications of Symmetry and Group Theory (Artigo)MoahVieiraNo ratings yet
- Dynamics of A Mass-Spring-Pendulum System With Vastly Different FrequenciesDocument6 pagesDynamics of A Mass-Spring-Pendulum System With Vastly Different FrequenciesvertugoNo ratings yet
- DSP Lab Report 3 Pole Zero Plots and Stability: B Siva Sarath B100558EC A Batch 13 AUG 2013Document12 pagesDSP Lab Report 3 Pole Zero Plots and Stability: B Siva Sarath B100558EC A Batch 13 AUG 2013Kasi Kumar KeerthipatiNo ratings yet
- Simple Pedulum Motion: General Physics Quastion SheetsDocument8 pagesSimple Pedulum Motion: General Physics Quastion SheetsShiun TungNo ratings yet
- Report On Nonlinear DynamicsDocument24 pagesReport On Nonlinear DynamicsViraj NadkarniNo ratings yet
- Non-Linear Dynamical Systems Theory: Analysis of Biological Models Involving Coupled Differential EquationsDocument44 pagesNon-Linear Dynamical Systems Theory: Analysis of Biological Models Involving Coupled Differential EquationsAbrar ShaikhNo ratings yet
- Dynamical Systems: Lecture NotesDocument40 pagesDynamical Systems: Lecture NotesBernard Nkrumah AttobrahNo ratings yet
- Lattice Boltzmann MethodDocument15 pagesLattice Boltzmann MethodsvkindiaNo ratings yet
- Chaos Exp 2 To Word PDF TYARDocument9 pagesChaos Exp 2 To Word PDF TYARnishrish sihagNo ratings yet
- Exp 6Document13 pagesExp 6GlenNo ratings yet
- Simulation of The Inverted Pendulum: Interdisciplinary Project in Computer Science and MathematicsDocument33 pagesSimulation of The Inverted Pendulum: Interdisciplinary Project in Computer Science and MathematicsHoang NguyenNo ratings yet
- 2019-Me-104 MV CepDocument25 pages2019-Me-104 MV Cepabubakarshoaib008No ratings yet
- WilberforceDocument16 pagesWilberforce123chess0% (1)
- Coopertitchener Trifilar1Document30 pagesCoopertitchener Trifilar1api-24490620450% (2)
- Lab Report: ME3112-1 Vibration MeasurementDocument7 pagesLab Report: ME3112-1 Vibration MeasurementandyNo ratings yet
- Lab 3: The Coupled Pendulum and A Bit On The Chaotic Double PendulumDocument9 pagesLab 3: The Coupled Pendulum and A Bit On The Chaotic Double Pendulumgarfacio30No ratings yet
- Quantum Corrections to Solitons Using a Numerical TechniqueDocument8 pagesQuantum Corrections to Solitons Using a Numerical Techniqueumunera2997No ratings yet
- Implementation of Quantum Computing Techniques On NMR SystemsDocument31 pagesImplementation of Quantum Computing Techniques On NMR SystemsBrendan ChongNo ratings yet
- Computational Statistical Physics: Lecture NotesDocument61 pagesComputational Statistical Physics: Lecture NotesPatrick SibandaNo ratings yet
- M. Meister, F.G. Mertens and A. Sanchez - Soliton Diff Usion On The Classical, Isotropic Heisenberg ChainDocument13 pagesM. Meister, F.G. Mertens and A. Sanchez - Soliton Diff Usion On The Classical, Isotropic Heisenberg Chain23213mNo ratings yet
- Noncommutative SolitonsDocument30 pagesNoncommutative SolitonsmlmilleratmitNo ratings yet
- Dinius Project PaperDocument8 pagesDinius Project PaperIman SatriaNo ratings yet
- Serge Lacelle and Luc Tremblay - NMR Multiple Quantum Dynamics in Large Spin NetworksDocument5 pagesSerge Lacelle and Luc Tremblay - NMR Multiple Quantum Dynamics in Large Spin NetworksLopmazNo ratings yet
- Behavior of Lorenz EquationDocument50 pagesBehavior of Lorenz EquationAbdullah Al MamunNo ratings yet
- Rbanci Freportfa11 PDFDocument17 pagesRbanci Freportfa11 PDFMuhammad FahimNo ratings yet
- N BodyreportDocument9 pagesN BodyreportCharles APNo ratings yet
- Controls PBLDocument23 pagesControls PBLHuzi MalixNo ratings yet
- Analysis of Nonlinear Oscillators in The Frequency Domain Using Volterra SeriesDocument15 pagesAnalysis of Nonlinear Oscillators in The Frequency Domain Using Volterra Seriessumatrablackcoffee453No ratings yet
- Markov Chains An Introduction WI1614Document80 pagesMarkov Chains An Introduction WI1614Myrte BareillesNo ratings yet
- Chap3 15Document65 pagesChap3 15Austin Yu LiuNo ratings yet
- Lagrange Equation 1Document32 pagesLagrange Equation 1Gthulasi78No ratings yet
- Controlengg Compiled Sridar (Session 1 8)Document60 pagesControlengg Compiled Sridar (Session 1 8)Prem T RajuNo ratings yet
- Marqui Johnson M.S. ThesisDocument44 pagesMarqui Johnson M.S. ThesisrenyNo ratings yet
- 3 Point Groups and Symmetries of Molecules 3: C O Molecule - . - . - . - . - . - . - . - . - . 10 CDocument34 pages3 Point Groups and Symmetries of Molecules 3: C O Molecule - . - . - . - . - . - . - . - . - . 10 CHeismanNicoláNo ratings yet
- Classical integrability and algebraic Bethe ansatzDocument36 pagesClassical integrability and algebraic Bethe ansatzDieff_No ratings yet
- Killing Vectors in A Diffeomorphic FieldDocument14 pagesKilling Vectors in A Diffeomorphic FieldYashee SinhaNo ratings yet
- Problems and Solutions in Differential Geometry and ApplicationsDocument125 pagesProblems and Solutions in Differential Geometry and ApplicationsseimomNo ratings yet
- Nuclear and Particle Physics: PHY F343Document23 pagesNuclear and Particle Physics: PHY F343Yashee SinhaNo ratings yet
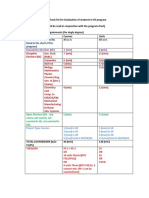
- Graduation ChecklistDocument2 pagesGraduation ChecklistKalyanNo ratings yet
- Soups, Salads, Sandwiches & Pasta MenuDocument23 pagesSoups, Salads, Sandwiches & Pasta Menujoohi agarwalNo ratings yet
- Soups, Salads, Sandwiches & Pasta MenuDocument23 pagesSoups, Salads, Sandwiches & Pasta Menujoohi agarwalNo ratings yet
- Martens Et Al. - 2013 - Chimera States in Mechanical Oscillator NetworksDocument5 pagesMartens Et Al. - 2013 - Chimera States in Mechanical Oscillator NetworksYashee SinhaNo ratings yet
- Pantaleone - 2002 - Synchronization of MetronomesDocument10 pagesPantaleone - 2002 - Synchronization of MetronomesYashee SinhaNo ratings yet
- Psychopathia Sexualis Full ScriptDocument52 pagesPsychopathia Sexualis Full ScriptYashee Sinha100% (1)
- F111 Handout PDFDocument3 pagesF111 Handout PDFYashee SinhaNo ratings yet
- Pantaleone - 2002 - Synchronization of MetronomesDocument10 pagesPantaleone - 2002 - Synchronization of MetronomesYashee SinhaNo ratings yet
- Martens Et Al. - 2013 - Chimera States in Mechanical Oscillator NetworksDocument5 pagesMartens Et Al. - 2013 - Chimera States in Mechanical Oscillator NetworksYashee SinhaNo ratings yet
- 7th Int'l Civil Engineering ConfDocument8 pages7th Int'l Civil Engineering ConfSafet CemalovicNo ratings yet
- 1-15 p32 Automated Validation of Canfd Networks Cs-GroupDocument2 pages1-15 p32 Automated Validation of Canfd Networks Cs-GroupRakshithNo ratings yet
- CRO Waveform DisplayDocument39 pagesCRO Waveform DisplayomkaoNo ratings yet
- Wave Motion – Resonance Principle of SuperpositionDocument4 pagesWave Motion – Resonance Principle of Superpositiondeep34No ratings yet
- T200A Hardware Operation Manual GuideDocument61 pagesT200A Hardware Operation Manual GuideBaballNo ratings yet
- Periodic Waveform Generation in FPGADocument7 pagesPeriodic Waveform Generation in FPGAnm2007kNo ratings yet
- Symptoms of Vibration Due To LoosenessDocument5 pagesSymptoms of Vibration Due To LoosenessStephen SnyderNo ratings yet
- Chapter 7Document16 pagesChapter 7YvesExequielPascua100% (2)
- Data Communication and Computer Networks: Addis Ababa Science and Technology UniversityDocument191 pagesData Communication and Computer Networks: Addis Ababa Science and Technology UniversityMengesha KirosNo ratings yet
- Data Communication: Asst. Prof Madan Raj Upreti Nepal Engineering College Bhaktpur, Changunaryan-NepalDocument21 pagesData Communication: Asst. Prof Madan Raj Upreti Nepal Engineering College Bhaktpur, Changunaryan-NepalKishor KadelNo ratings yet
- Portable VLF Cable Test Systems Up to 60kVDocument4 pagesPortable VLF Cable Test Systems Up to 60kVlblancoingNo ratings yet
- Manual Electrical Engineering Lab 2: PoliteknikDocument7 pagesManual Electrical Engineering Lab 2: Politeknikae7678No ratings yet
- How To Test A Protection RelayDocument33 pagesHow To Test A Protection RelayAkhilesh HarishmaNo ratings yet
- Digital Signal Processing Lab Exercise 1: Time-Domain Representation and OperationsDocument4 pagesDigital Signal Processing Lab Exercise 1: Time-Domain Representation and OperationsFadillah RomadhonNo ratings yet
- Exp 4 Familiarization With The TFUDocument8 pagesExp 4 Familiarization With The TFUusmpowerlabNo ratings yet
- IcosphiDocument5 pagesIcosphiArvind SharmaNo ratings yet
- A Machine Learning Integrated 5.8-GHz Continuous-Wave Radar For Honeybee Monitoring and Behavior ClassificationDocument11 pagesA Machine Learning Integrated 5.8-GHz Continuous-Wave Radar For Honeybee Monitoring and Behavior ClassificationChandra KanthNo ratings yet
- Isa-Rp37.2-1982 (R1995)Document36 pagesIsa-Rp37.2-1982 (R1995)Sergio LungrinNo ratings yet
- Tontechnikkompendium de enDocument466 pagesTontechnikkompendium de enMehdiŽigoNo ratings yet
- PCS - Unit III - ASV - V1Document139 pagesPCS - Unit III - ASV - V1Anup S. Vibhute DITNo ratings yet
- EEET2369 Signals and Systems Introduction To Signals and SystemsDocument23 pagesEEET2369 Signals and Systems Introduction To Signals and SystemsGeoffrey ScarlettNo ratings yet
- Barge Roll Motion PDFDocument8 pagesBarge Roll Motion PDFJym GensonNo ratings yet
- Recurring Phase of Cycle Analysis - John EhlersDocument8 pagesRecurring Phase of Cycle Analysis - John EhlersTrader CatNo ratings yet
- ME 411 Fall 2012 Lab 7Document5 pagesME 411 Fall 2012 Lab 7Peter FinzellNo ratings yet
- Fourier Transform and Series AnalysisDocument22 pagesFourier Transform and Series Analysisلطيف احمد حسنNo ratings yet
- Lissajous FiguresDocument4 pagesLissajous FiguresMohamad Safwan SazaliNo ratings yet
- 03.ac Theory PDFDocument88 pages03.ac Theory PDFAvinashGurugubelliNo ratings yet
- Sinusoids and Phasors CompressDocument38 pagesSinusoids and Phasors CompressAhmed SiddiquiNo ratings yet