You might also like
- SCORPIO VLX - DIAGNOSTICE MANUAL - mHAWK-Rev2 PDFDocument201 pagesSCORPIO VLX - DIAGNOSTICE MANUAL - mHAWK-Rev2 PDFAlejandro Horn Alvarez100% (6)
- Troubleshooting C15Document4 pagesTroubleshooting C15mohammad hazbehzadNo ratings yet
- Program ESC 2019Document8 pagesProgram ESC 2019Aris100% (1)
- Spare Parts Catalog: 12 AS 2331 TD Material Number: 1353.041.012 Current Date: 12.11.2013Document90 pagesSpare Parts Catalog: 12 AS 2331 TD Material Number: 1353.041.012 Current Date: 12.11.2013Андрей АндрусенкоNo ratings yet
- Galileo!!! Ticketing Traning!!!!!!!!!!!!!!! Learn Free!!!!!!!!! - Air Ticketing (GDS)Document9 pagesGalileo!!! Ticketing Traning!!!!!!!!!!!!!!! Learn Free!!!!!!!!! - Air Ticketing (GDS)Muhammad YousifNo ratings yet
- Program To Interface GSM Module With 8051 Micro ControllerDocument13 pagesProgram To Interface GSM Module With 8051 Micro ControllerEphrem Melka Negash80% (10)
- 5 Concrete WorkDocument57 pages5 Concrete WorkSiti Nurul SyakinahNo ratings yet
- Implementing An ISMS Participant Guide V1.1Document164 pagesImplementing An ISMS Participant Guide V1.1William Anderson100% (3)
- Dyno Nobel Shock TubeDocument27 pagesDyno Nobel Shock TubeDinoYancachajlla100% (1)
- Supply Chain IntegrationDocument5 pagesSupply Chain IntegrationnithiyaranjiniNo ratings yet
- Found FuturesDocument7 pagesFound FuturesStuart CandyNo ratings yet
- PidDocument5 pagesPidArif Nugroho100% (1)
- Proiecte ArduinoDocument46 pagesProiecte ArduinoSyad AlyNo ratings yet
- #Define #Define #Define #Define #Define #Define #Define #DefineDocument6 pages#Define #Define #Define #Define #Define #Define #Define #Defineอํานาจ จันทรNo ratings yet
- Vehicle Speed CodeDocument6 pagesVehicle Speed CodeMadhanDhonianNo ratings yet
- ZadatciDocument22 pagesZadatciTakticar100% (1)
- PC 5Document8 pagesPC 5Miguel RodasNo ratings yet
- Code of Mi ProjectDocument5 pagesCode of Mi ProjectGangeshwar MauryaNo ratings yet
- F - Cpu: #Define #Include #Include #Include #DefineDocument1 pageF - Cpu: #Define #Include #Include #Include #DefineupendraNo ratings yet
- CodigoDocument1 pageCodigoJuan carlos Mamani quispeNo ratings yet
- GPS CodingDocument13 pagesGPS CodinghimanshuNo ratings yet
- Họ và tên: Hoàng Ngọc Bình - Nguyễn Thanh Tùng Lớp: Tự động hóa -K58 Bài 1Document8 pagesHọ và tên: Hoàng Ngọc Bình - Nguyễn Thanh Tùng Lớp: Tự động hóa -K58 Bài 1Lê Minh HiếuNo ratings yet
- ADC-DHT11 CDocument7 pagesADC-DHT11 CGiancarloNo ratings yet
- STM32F0 C Code For Remote Control InputDocument15 pagesSTM32F0 C Code For Remote Control InputLuke Maximo Bell100% (1)
- #Include #Include: KeypadscanningDocument2 pages#Include #Include: KeypadscanningElke RadistyaNo ratings yet
- Praktikum V DSP Dengan Menggunakan ARM: Hariyanto (1310125026) Selvira Rahadiningrum Ramelan (1310125027)Document6 pagesPraktikum V DSP Dengan Menggunakan ARM: Hariyanto (1310125026) Selvira Rahadiningrum Ramelan (1310125027)Primaridha SaputraNo ratings yet
- SN 24Document1 pageSN 24Funny Aqna (Funny)No ratings yet
- 7 Seg Done G CodeDocument6 pages7 Seg Done G Codekiran belleNo ratings yet
- DS Zadaci PDFDocument23 pagesDS Zadaci PDFArnela Tatic100% (1)
- Codigo LCD C ModificadoDocument3 pagesCodigo LCD C ModificadoMartinQuintanaCasusol100% (1)
- Analisa Program Detector TeganganDocument8 pagesAnalisa Program Detector Teganganblimbing rotor1No ratings yet
- Display "Hello World"message Using Internal UARTDocument16 pagesDisplay "Hello World"message Using Internal UARTAkshathaNo ratings yet
- ADS1262 IssueDocument3 pagesADS1262 IssueTeuku Makmur TsaniNo ratings yet
- Giao tiếp I2C vs DS1302Document14 pagesGiao tiếp I2C vs DS1302lizhi0007No ratings yet
- looping Dari 0 Sampai 7: Kiri KananDocument7 pageslooping Dari 0 Sampai 7: Kiri KananJhonyAmbaritaNo ratings yet
- code tránh vật cảnDocument4 pagescode tránh vật cảnquang tu tranNo ratings yet
- ADCDocument6 pagesADCJhon PerezNo ratings yet
- Source Code-234Document9 pagesSource Code-234Bryan Joshua SalvidarNo ratings yet
- Main Program MonitoringDocument10 pagesMain Program MonitoringBagus NugrohoNo ratings yet
- FDDocument2 pagesFDknoppix_debianNo ratings yet
- Experiment#11: Question#1Document3 pagesExperiment#11: Question#1jameeshudsonNo ratings yet
- C2 Con InterrupcionDocument5 pagesC2 Con InterrupcionCarlos GallardoNo ratings yet
- Ee 222 CepDocument10 pagesEe 222 CepObed AhmadNo ratings yet
- Điều khiển động cơ sử dụng UARTDocument7 pagesĐiều khiển động cơ sử dụng UARTquycongle03No ratings yet
- NiticodeDocument14 pagesNiticodeAyushBansalNo ratings yet
- Si4703 - Example Code Si4703 FM TunerDocument10 pagesSi4703 - Example Code Si4703 FM TunerHotel WijayaNo ratings yet
- C JAVA Sockets ExamplesDocument10 pagesC JAVA Sockets Examplesشهاب الدينNo ratings yet
- Mikrodenetleyiciler Hafta 8Document10 pagesMikrodenetleyiciler Hafta 8Yasin çelebiNo ratings yet
- #Define #Include #Include #Include #Include #Include Int Int Int Int Int Int Int Int Int Int Int IntDocument19 pages#Define #Include #Include #Include #Include #Include Int Int Int Int Int Int Int Int Int Int Int IntTrần HiếuNo ratings yet
- ESP CodeDocument6 pagesESP CodeAshwani Dhiman0% (1)
- ADXL345 Sensor I2C InterfaceDocument5 pagesADXL345 Sensor I2C Interfaceavi kishuNo ratings yet
- AccDocument5 pagesAccgn NiktoNo ratings yet
- Computer For ABEDocument8 pagesComputer For ABELyka Mae MancolNo ratings yet
- ESP8266 Masina3PWM - InoDocument10 pagesESP8266 Masina3PWM - InomarinpopaNo ratings yet
- CodeDocument5 pagesCodeHuy NguyễnNo ratings yet
- UntitledDocument16 pagesUntitledMark christian LacapNo ratings yet
- Program For ADC 0808 Connecting Temperature Sensor Using 8051Document13 pagesProgram For ADC 0808 Connecting Temperature Sensor Using 8051Kishore KumarNo ratings yet
- Conv AdcDocument2 pagesConv AdcDulceNo ratings yet
- Weather Station Using 8051Document10 pagesWeather Station Using 8051MANOJ K0% (1)
- Arduino PWM and FrecuenciaDocument5 pagesArduino PWM and FrecuenciaOscar Caceres ChuraNo ratings yet
- Contoh Aplikasi Avr: Menghidupkan Led (Byte) - OutputDocument12 pagesContoh Aplikasi Avr: Menghidupkan Led (Byte) - OutputMuhammad Syafi'iNo ratings yet
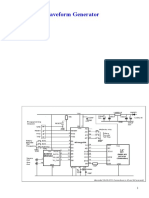
- AD9850 Waveform GeneratorDocument9 pagesAD9850 Waveform GeneratorDemixManNo ratings yet
- CodeDocument9 pagesCodeMuHammad TaHir HasSanNo ratings yet
- HW Cpe 301 UartDocument5 pagesHW Cpe 301 Uartliquidmoon1973100% (2)
- LPC 2148Document14 pagesLPC 2148Shivanshu GuptaNo ratings yet
- Usart +timmerDocument1 pageUsart +timmerdatapot465No ratings yet
- GPIO Code ExamplesDocument7 pagesGPIO Code ExamplescrsarinNo ratings yet
- Rfid and Zigbee Based Logistics Monitoring SystemDocument8 pagesRfid and Zigbee Based Logistics Monitoring SystemRAJASHEKHARNo ratings yet
- MindMapper 2009 ManualDocument146 pagesMindMapper 2009 ManualLady KweeNo ratings yet
- Cbi/A: High-Performance and Robust Backward-Curved ImpellerDocument2 pagesCbi/A: High-Performance and Robust Backward-Curved ImpellerVenu Gopal TallojuNo ratings yet
- Pt. Nusa Raya Cipta (JHL Gallery) PLBDocument2 pagesPt. Nusa Raya Cipta (JHL Gallery) PLBWiwin LatifahNo ratings yet
- TPG Infogram PDFDocument3 pagesTPG Infogram PDFAnonymous UmSXQgW4No ratings yet
- Debbie Laine L. Cacay: Job Target and ObjectivesDocument3 pagesDebbie Laine L. Cacay: Job Target and ObjectivesMae LakeNo ratings yet
- Portable Storage Device ManagementDocument6 pagesPortable Storage Device ManagementcseijNo ratings yet
- Online Flight Reservation System: FeaturesDocument3 pagesOnline Flight Reservation System: FeaturesdssfdNo ratings yet
- Welding Consumable Calculation (WCC) : Doc. No P.O No Rev. No Project Details Technical Requirement ConsumablesDocument26 pagesWelding Consumable Calculation (WCC) : Doc. No P.O No Rev. No Project Details Technical Requirement ConsumablesAhmad KamilNo ratings yet
- Learning With Visual Basic 6.0 To Telecommunication EngineeringDocument5 pagesLearning With Visual Basic 6.0 To Telecommunication EngineeringDonimontokNo ratings yet
- Hy-Gain 2010 CatalogDocument9 pagesHy-Gain 2010 CatalogkelpiusNo ratings yet
- Structure of CSSD For WebsiteDocument6 pagesStructure of CSSD For WebsiteTatavarti AnandNo ratings yet
- Industrial Buses Super Basic IntroDocument153 pagesIndustrial Buses Super Basic Introvasanth_erNo ratings yet
- ATM Cell StructureDocument2 pagesATM Cell StructureSyed Danish HasanNo ratings yet
- GMT Goldmaster E-Series enDocument30 pagesGMT Goldmaster E-Series enSalih Abdelrazig AbdelrhmanNo ratings yet
- Storekeeper CVDocument3 pagesStorekeeper CVmohamedksa71% (14)
- Calculate No of Street Light Poles - Electrical Notes & ArticlesDocument5 pagesCalculate No of Street Light Poles - Electrical Notes & ArticlesRath NithNo ratings yet
- Splitting Tensile Strength of Masonry Units: Standard Test Method ForDocument3 pagesSplitting Tensile Strength of Masonry Units: Standard Test Method ForMaría Elena Novelo ArjonaNo ratings yet
- Report On Marketing Communication Assignment: Submitted ToDocument13 pagesReport On Marketing Communication Assignment: Submitted ToFahad KhanNo ratings yet
- Examinando Las Escrituras Diariamente 2015Document218 pagesExaminando Las Escrituras Diariamente 2015http://miscomodisimos.comNo ratings yet