You might also like
- 2306 8FM0-01 As Core Pure Mathematics June 2023 PDF 3Document36 pages2306 8FM0-01 As Core Pure Mathematics June 2023 PDF 3ClintDoesMusicNo ratings yet
- My Revision Notes AQA CS A-LevelDocument259 pagesMy Revision Notes AQA CS A-LevelAyaan SaifNo ratings yet
- PIC Microcontroller 7-Segment Display CodeDocument23 pagesPIC Microcontroller 7-Segment Display CodeArnela Tatic100% (1)
- LCD 16x2Document6 pagesLCD 16x2teguh iman100% (2)
- Codigo LCD C ModificadoDocument3 pagesCodigo LCD C ModificadoMartinQuintanaCasusol100% (1)
- PIC18 Pulse Width ModulationDocument16 pagesPIC18 Pulse Width ModulationAnoj Pahathkumbura100% (1)
- 16x2 Basic LCD Driver Files XC8Document3 pages16x2 Basic LCD Driver Files XC8asmedmiranda100% (1)
- TablasDocument6 pagesTablasValeria Arreola100% (2)
- HBridgeMotorControl With PICDocument11 pagesHBridgeMotorControl With PICcoceicr100% (3)
- ASM REG, FLAGS, INSTRUCTIONSDocument7 pagesASM REG, FLAGS, INSTRUCTIONSCalvin Ohsey100% (1)
- Librerias LCD para Manejo en Avr Archivo en CDocument11 pagesLibrerias LCD para Manejo en Avr Archivo en CYonathan Mora100% (1)
- LED Moving Message Diaply Using PIC16f628 CD4017 and 74LS595Document5 pagesLED Moving Message Diaply Using PIC16f628 CD4017 and 74LS595murugaraj19822100% (1)
- The Semi Colon Is Used at The End of Proc SQL StatementDocument5 pagesThe Semi Colon Is Used at The End of Proc SQL StatementOm Prakash100% (1)
- 8051 3 Wire LCDDocument4 pages8051 3 Wire LCDmpkkbtech100% (2)
- Tech ME007 PDFDocument12 pagesTech ME007 PDFfredniels100% (2)
- Create database and tables for student course registration systemDocument7 pagesCreate database and tables for student course registration systemPhương Lan100% (1)
- Hws 13642Document3 pagesHws 13642dhieward100% (2)
- LCD interface example for Hitachi HD44780 controllerDocument4 pagesLCD interface example for Hitachi HD44780 controllerNamrata Dhamal100% (1)
- LCD & ADC Experiment CodeDocument5 pagesLCD & ADC Experiment CodeKavindran Ganesan100% (1)
- JHD12864Document15 pagesJHD12864dravife100% (1)
- Interfacing an HD44780 LCD to a C8051F120 MicrocontrollerDocument23 pagesInterfacing an HD44780 LCD to a C8051F120 Microcontrollerahimpli100% (2)
- PIC (PWM PGM Steps)Document20 pagesPIC (PWM PGM Steps)Elena Gilbert100% (2)
- A Note On Character LCD DisplaysDocument11 pagesA Note On Character LCD DisplaysLishan Jayanath100% (2)
- Interfacing A LCD Display With 8051Document7 pagesInterfacing A LCD Display With 8051bhaswati100% (1)
- GDM2004D LCD SpecsheetDocument9 pagesGDM2004D LCD SpecsheetNico Bellic100% (2)
- FPGA SPI Master ControllerDocument4 pagesFPGA SPI Master ControllerSuraj Kumar100% (1)
- DHT Temperature and Humidity Sensor Project Using PIC16F628ADocument8 pagesDHT Temperature and Humidity Sensor Project Using PIC16F628AMarcio Jose Terezinha Belinssi100% (1)
- LCD - GDM1602BDocument10 pagesLCD - GDM1602BElanio Julio100% (1)
- File: /home/ashish/desktop/lcd/lcdlibv20/lcd.c Page 1 of 6: "LCD.H"Document6 pagesFile: /home/ashish/desktop/lcd/lcdlibv20/lcd.c Page 1 of 6: "LCD.H"letter_ashish4444100% (1)
- Interfacing Example - 16 Character X 2 Line LCD: DescriptionDocument5 pagesInterfacing Example - 16 Character X 2 Line LCD: DescriptionManish Kumar sharma100% (1)
- LCD EEPROM Microcontroller Example Using PIC16F877ADocument1 pageLCD EEPROM Microcontroller Example Using PIC16F877AGiovanni Coaquira100% (1)
- Assembly Programming Journal 3Document55 pagesAssembly Programming Journal 3AmineBenali100% (2)
- The Semi Colon Is Used at The End of Proc SQL StatementDocument5 pagesThe Semi Colon Is Used at The End of Proc SQL StatementNagesh Khandare100% (1)
- Nex-Robotics 20x4 Serial LCD ModuleDocument9 pagesNex-Robotics 20x4 Serial LCD ModuleAshok Kumar100% (1)
- 2D Arrays GuideDocument20 pages2D Arrays Guidealizarana100% (1)
- SDA and I2C Configuration on a PIC16F887 MicrocontrollerDocument1 pageSDA and I2C Configuration on a PIC16F887 MicrocontrollerOscar Andres Soto100% (2)
- Brushless DC Electric Motor Control by CPLDDocument6 pagesBrushless DC Electric Motor Control by CPLDIonela100% (3)
- RS485 5 Click Schematic v103Document1 pageRS485 5 Click Schematic v103Lauro Da Silva100% (1)
- Inline Asm86Document105 pagesInline Asm86siddharthpwatwe100% (3)
- CCP PWMDocument19 pagesCCP PWMalaa_saq100% (1)
- 11 Low Level Programming and InterfacingDocument28 pages11 Low Level Programming and Interfacingsyukz100% (1)
- pinMode() Explained: Configure Arduino Pins as Input or OutputDocument3 pagespinMode() Explained: Configure Arduino Pins as Input or OutputKrishanu Modak100% (1)
- #Include #Define FOR (I, N) For (Int I 0 I N I++)Document3 pages#Include #Define FOR (I, N) For (Int I 0 I N I++)tohil chini100% (1)
- UsbserDocument1 pageUsbserNo_ID002100% (1)
- LCD4Bit ModDocument5 pagesLCD4Bit ModCleison Armando Manrique Aguirre100% (1)
- Overview of The Inter-Integrated Circuit (I C) Bus: 2 ECPE 4536 Microprocessor System Design II Virginia TechDocument7 pagesOverview of The Inter-Integrated Circuit (I C) Bus: 2 ECPE 4536 Microprocessor System Design II Virginia Techdineshvhaval100% (1)
- Open Core SpiDocument13 pagesOpen Core SpiBhanu Pratap Singh100% (1)
- SPI Master Core Specification: Author: Simon SrotDocument14 pagesSPI Master Core Specification: Author: Simon SrotManoj Kumar100% (1)
- Ch8 ASSEMBLER PDFDocument11 pagesCh8 ASSEMBLER PDFCôngHoàng100% (2)
- EpspDocument1 pageEpspAhsen Junaid100% (1)
- Praktek 6 AVR Display Data Pada LCD-1Document15 pagesPraktek 6 AVR Display Data Pada LCD-1YeheskielRantePayung100% (1)
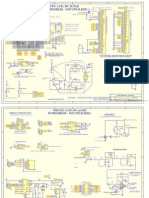
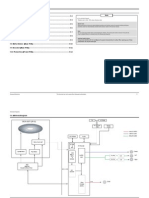
- Schematic Diagrams: Special NoteDocument12 pagesSchematic Diagrams: Special NoteAlexandre S. Corrêa100% (1)
- I2C-Master Core SpecificationDocument17 pagesI2C-Master Core Specificationvarunmr100% (1)
- Testing Pic Code For I2C Master - Slave CommunicationDocument15 pagesTesting Pic Code For I2C Master - Slave CommunicationJavier Corimaya33% (3)
- Bas CPPDocument19 pagesBas CPPAnuj Bansal100% (1)
- Using The TWI Module As I2C MasterDocument11 pagesUsing The TWI Module As I2C Mastermithrandair100% (1)
- LCD LCD: MCLR Led1 Led2 Led3 Led4 RXD MCLRDocument1 pageLCD LCD: MCLR Led1 Led2 Led3 Led4 RXD MCLRChu Trọng Khanh100% (1)
- Design Ideas: Keyboard CircuitDocument2 pagesDesign Ideas: Keyboard CircuitTariq Zuhluf100% (3)
- 4x4 Matrix Key-Board Interfacing With ATmega32Document6 pages4x4 Matrix Key-Board Interfacing With ATmega32Emin Kültürel100% (1)
- Chương Trình Mẫu Các Bài Tập Học Phần Kỹ Thuật Vi Xử Lý 1. Điều khiển Led đơn và nhận phím bấm sử dụng hàm trễ thời gianDocument34 pagesChương Trình Mẫu Các Bài Tập Học Phần Kỹ Thuật Vi Xử Lý 1. Điều khiển Led đơn và nhận phím bấm sử dụng hàm trễ thời gianThresh GoldNo ratings yet
- Điều-khiển-động-cơ-sử-dụng-UARTDocument7 pagesĐiều-khiển-động-cơ-sử-dụng-UARTquycongle03No ratings yet
- Điều khiển LCD và ADC trên PIC16F877ADocument8 pagesĐiều khiển LCD và ADC trên PIC16F877ALê Minh HiếuNo ratings yet
- Artificial IntelligenceDocument2 pagesArtificial IntelligencebhargaviNo ratings yet
- Fourier Transform of Continuous SignalsDocument26 pagesFourier Transform of Continuous SignalsNini LashariNo ratings yet
- EE223 Signals & Systems - Spring 2021 Assignment 5Document11 pagesEE223 Signals & Systems - Spring 2021 Assignment 5Muhammad AbdullahNo ratings yet
- Deep Learning Chorale PreludeDocument6 pagesDeep Learning Chorale Preludetushar wadileNo ratings yet
- Controller Design For A 1000 MW Ultra Super Critical Once-Through Boiler Power PlantDocument6 pagesController Design For A 1000 MW Ultra Super Critical Once-Through Boiler Power PlantAnonymous lmCR3SkPrKNo ratings yet
- Design FilterDocument27 pagesDesign FilterubaydaturkNo ratings yet
- 8-5 Study Guide and Intervention: Using The Distributive PropertyDocument2 pages8-5 Study Guide and Intervention: Using The Distributive Propertybd6cpynwmpNo ratings yet
- Snowflake MLPFDocument7 pagesSnowflake MLPFjahnavi208No ratings yet
- A New Method For Dimensionality Reduction Using K-Means Clustering Algorithm For High Dimensional Data SetDocument6 pagesA New Method For Dimensionality Reduction Using K-Means Clustering Algorithm For High Dimensional Data SetM MediaNo ratings yet
- A Novel Meso-Dynamic Simulation Model of TrafficDocument4 pagesA Novel Meso-Dynamic Simulation Model of TrafficEmilio MallquiNo ratings yet
- Quiz On Differential Equations MVCDocument9 pagesQuiz On Differential Equations MVCsbandlam8005No ratings yet
- Huffman Algorithm: For Text CompressionDocument20 pagesHuffman Algorithm: For Text CompressionAndysah Putra Utama SiahaanNo ratings yet
- Problem C - Meta Hacker Cup - 2023 - Practice RoundDocument1 pageProblem C - Meta Hacker Cup - 2023 - Practice Roundhienn3042003No ratings yet
- The Double Transposition CipherDocument2 pagesThe Double Transposition CipherBenjie Sabado VasquezNo ratings yet
- MATLAB Tutorial 5 - Numerical IntegrationDocument11 pagesMATLAB Tutorial 5 - Numerical IntegrationJayakumar RamachandranNo ratings yet
- Cryptography and Network SecurityDocument8 pagesCryptography and Network SecurityAnish KumarNo ratings yet
- Discrete and Continuous Data - Google SearchDocument7 pagesDiscrete and Continuous Data - Google SearchJrlyn McrlNo ratings yet
- Unit 6 - Module-3 (Week-3) : Assignment 3Document6 pagesUnit 6 - Module-3 (Week-3) : Assignment 3Rohit DuttaNo ratings yet
- 2 Basic Root Locus Analysis and Examples PDFDocument26 pages2 Basic Root Locus Analysis and Examples PDFKashif AshharNo ratings yet
- ME478 FEA Su08 Syllabus PDFDocument2 pagesME478 FEA Su08 Syllabus PDFNurrohman NurrohmanNo ratings yet
- OR ReportDocument49 pagesOR ReportAnkit SharmaNo ratings yet
- Estimating Missing Values in Split-Plot DesignDocument8 pagesEstimating Missing Values in Split-Plot DesignIhsan FauzanNo ratings yet
- Chapter - 01 - Intro CAE & FEMDocument26 pagesChapter - 01 - Intro CAE & FEMNurul Nadia Mohd ZawawiNo ratings yet
- Dong OmniQuest Genesis Dyna InterfaceDocument10 pagesDong OmniQuest Genesis Dyna InterfaceAshith ShettyNo ratings yet
- ML Assignment Deadline Jan 21Document3 pagesML Assignment Deadline Jan 21lalaNo ratings yet
- Signals Systems and ControlDocument565 pagesSignals Systems and ControlDiogo SilvaNo ratings yet
- Is It Time To Reformulate The Partial Differential Equations of Poisson and Laplace?Document9 pagesIs It Time To Reformulate The Partial Differential Equations of Poisson and Laplace?International Journal of Innovative Science and Research TechnologyNo ratings yet
- IT Zabljak 2023Document4 pagesIT Zabljak 2023Ivana MilašNo ratings yet