You might also like
- Tables of The Legendre Functions P—½+it(x): Mathematical Tables SeriesFrom EverandTables of The Legendre Functions P—½+it(x): Mathematical Tables SeriesNo ratings yet
- Chapter3 PDFDocument85 pagesChapter3 PDFmj kNo ratings yet
- FourierDocument49 pagesFourierEl Pepe El PepeNo ratings yet
- All Signals in Nature Are in Continuous TimeDocument24 pagesAll Signals in Nature Are in Continuous TimeYousef BilbeisiNo ratings yet
- 2 Deterministic Signal AnalysisDocument27 pages2 Deterministic Signal Analysistesfalem seyoumNo ratings yet
- Continuous-Time Fourier Transform: Prof. Adnan KavakDocument14 pagesContinuous-Time Fourier Transform: Prof. Adnan Kavakhobi dunyamNo ratings yet
- Signals and Systems 08 TL Section II Class Test 2: F X F YDocument1 pageSignals and Systems 08 TL Section II Class Test 2: F X F YFaizan MateenNo ratings yet
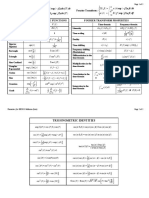
- Fourier Transform TableDocument8 pagesFourier Transform TableThe KingNo ratings yet
- Signals and Systems Class 12Document20 pagesSignals and Systems Class 12wizarderbrNo ratings yet
- Signals and Systems: Fourier Transform ExplainedDocument106 pagesSignals and Systems: Fourier Transform ExplainedGandhi NapitupuluNo ratings yet
- Ae2235 Exercises Lecture 6Document6 pagesAe2235 Exercises Lecture 6Sarieta SarrahNo ratings yet
- Fourier Transform Properties and ApplicationsDocument19 pagesFourier Transform Properties and ApplicationsBlacklist XNo ratings yet
- Fourier PDFDocument8 pagesFourier PDFNRMPNo ratings yet
- Fourier PDFDocument8 pagesFourier PDFNaeemo IraqiNo ratings yet
- Table of Fourier Transform PairsDocument8 pagesTable of Fourier Transform Pairsujjal deyNo ratings yet
- Fourier Relations in Optics: Spatial, Temporal and Spectral DomainsDocument54 pagesFourier Relations in Optics: Spatial, Temporal and Spectral DomainsLuis MesaNo ratings yet
- Fourier Transform PropertiesDocument1 pageFourier Transform PropertiessightlesswarriorNo ratings yet
- 1-D Fourier Transform Properties and ApplicationsDocument35 pages1-D Fourier Transform Properties and ApplicationsnnehasinghNo ratings yet
- Formulas (EXAM)Document3 pagesFormulas (EXAM)Thanh Dat NguyenNo ratings yet
- Attachment Fourier TransformDocument3 pagesAttachment Fourier Transformahmad hazimNo ratings yet
- The Continuous Fourier Transform and Its ApplicationsDocument16 pagesThe Continuous Fourier Transform and Its ApplicationswizarderbrNo ratings yet
- 02 Chapter 02Document60 pages02 Chapter 02Get CubeloNo ratings yet
- Continuous-Time Fourier TransformDocument8 pagesContinuous-Time Fourier TransformNikolas JaluNo ratings yet
- L4: Equalisation Bandpass Signals & Systems: (Carlson and Crilly Pp. 110, Sec 4.1 Proakis & Salehi Sec. 2.5)Document15 pagesL4: Equalisation Bandpass Signals & Systems: (Carlson and Crilly Pp. 110, Sec 4.1 Proakis & Salehi Sec. 2.5)Hunter VerneNo ratings yet
- Formulas (QUIZ)Document2 pagesFormulas (QUIZ)Thanh Dat NguyenNo ratings yet
- Chapter 4. Filtering in The Frequency Domain (1/2)Document34 pagesChapter 4. Filtering in The Frequency Domain (1/2)Ayoub MohammedNo ratings yet
- AlexanderCh18final R1Document19 pagesAlexanderCh18final R1utpNo ratings yet
- Fourier Transform FundamentalsDocument31 pagesFourier Transform Fundamentalslu huangNo ratings yet
- Applications of Laplace Transform: EEE111 Electric Circuit AnalysisDocument29 pagesApplications of Laplace Transform: EEE111 Electric Circuit AnalysisCHAYANIN AKETANANUNNo ratings yet
- W12 - Fourier Transform (Part 3)Document49 pagesW12 - Fourier Transform (Part 3)HermyraJ RobertNo ratings yet
- CS589-04 Digital Image Processing Filtering in Frequency DomainDocument123 pagesCS589-04 Digital Image Processing Filtering in Frequency DomainAshish PatelNo ratings yet
- Unit - 3.2 Analysis of CT SysDocument97 pagesUnit - 3.2 Analysis of CT SysmakNo ratings yet
- Unit - 3.2 Analysis of CT SysDocument97 pagesUnit - 3.2 Analysis of CT SysmakNo ratings yet
- Unit - 3.2 Analysis of CT SysDocument97 pagesUnit - 3.2 Analysis of CT SysmakNo ratings yet
- Chapter 4 Image Enhancement in The Frequency DomainDocument68 pagesChapter 4 Image Enhancement in The Frequency DomainILME AHMEDNo ratings yet
- Chapter Four Signal and SystemsDocument21 pagesChapter Four Signal and SystemsTolesa ShoreNo ratings yet
- WG28 Butterworth R2Document8 pagesWG28 Butterworth R2Josef TurekNo ratings yet
- L11 FourierPropertiesDocument14 pagesL11 FourierPropertiesCanio NoceNo ratings yet
- NS To RANSDocument5 pagesNS To RANSarujNo ratings yet
- Process Dynamic and Control - IntroDocument156 pagesProcess Dynamic and Control - IntroNuzul RamadhaniNo ratings yet
- L3: Linear, Time-Invariant (LTI) Systems and Linear DistortionDocument25 pagesL3: Linear, Time-Invariant (LTI) Systems and Linear DistortionHunter VerneNo ratings yet
- Homework 3 posted, midterm info, final project detailsDocument26 pagesHomework 3 posted, midterm info, final project detailsHermain KarimNo ratings yet
- Signals and Systems Class 17Document23 pagesSignals and Systems Class 17wizarderbrNo ratings yet
- 2 Band Pass SignalsDocument23 pages2 Band Pass SignalssitaramNo ratings yet
- Ca2 MathDocument26 pagesCa2 Mathrakeshsharmma2001No ratings yet
- Image Enhancement in The Frequency Domain: Spring 2006, Jen-Chang LiuDocument39 pagesImage Enhancement in The Frequency Domain: Spring 2006, Jen-Chang LiuJayaNo ratings yet
- Fourier Transforms PDFDocument30 pagesFourier Transforms PDFKavibharath RNo ratings yet
- Ch15_Laplace Transforms IDocument45 pagesCh15_Laplace Transforms IdadsdNo ratings yet
- Laplace Transformation TableDocument1 pageLaplace Transformation TableDjNo ratings yet
- Laplace Table SSCE1793Document1 pageLaplace Table SSCE1793super junlinNo ratings yet
- Ee4501f18 HW 1Document5 pagesEe4501f18 HW 1al-muntheral-mairikiNo ratings yet
- Control SystemDocument45 pagesControl SystemKelvin KongNo ratings yet
- Fourier Optics FundamentalsDocument25 pagesFourier Optics FundamentalsLauren StevensonNo ratings yet
- Laplace Transform Applications in Various FieldsDocument47 pagesLaplace Transform Applications in Various Fieldsjucar fernandezNo ratings yet
- Fourier Series Problems and AnswersDocument33 pagesFourier Series Problems and AnswersError 404No ratings yet
- The Fourier transform of sin(ω0t) is:Fsin(ω0t) = πδ(ω - ω0) - δ(ω + ω0)This follows from the fact that sin(ω0t) = (e^{jω0t} - e^{-jω0t})/2j and the Fourier transform property Fe^{jωt} = 2πδ(ω - ω0Document38 pagesThe Fourier transform of sin(ω0t) is:Fsin(ω0t) = πδ(ω - ω0) - δ(ω + ω0)This follows from the fact that sin(ω0t) = (e^{jω0t} - e^{-jω0t})/2j and the Fourier transform property Fe^{jωt} = 2πδ(ω - ω0Chernet TugeNo ratings yet
- Introduction To Laplace TransformsDocument32 pagesIntroduction To Laplace TransformsAd Man GeTigNo ratings yet
- 02590733723a4-Assignment Fourier TransformDocument4 pages02590733723a4-Assignment Fourier TransformNeeraj KumarNo ratings yet
- Unit IV Fourier Transform: D.Meiyappan Department of Applied Mathematics SvceDocument69 pagesUnit IV Fourier Transform: D.Meiyappan Department of Applied Mathematics SvcepoojaabanindranNo ratings yet
- Lesson 2: Weaving A Mannahatta Muir WebDocument2 pagesLesson 2: Weaving A Mannahatta Muir WebTamas SzamosfalvyNo ratings yet
- 1605 HOBAS Jacking Pipes WebDocument16 pages1605 HOBAS Jacking Pipes Weballouche_abdNo ratings yet
- 3 Payroll ReportDocument4 pages3 Payroll ReportBen NgNo ratings yet
- Avago Fiber Optic ComponentsDocument8 pagesAvago Fiber Optic ComponentsGerardo BaltaNo ratings yet
- Clinical Presentation of Ectopic Pregnancy Turned Out to Be Ectopic PregnancyDocument33 pagesClinical Presentation of Ectopic Pregnancy Turned Out to Be Ectopic PregnancyRosiNo ratings yet
- Prob StatDocument1 pageProb StatSerenity VertesNo ratings yet
- 3152-4 Data SheetDocument2 pages3152-4 Data SheetPhuongNguyenDinhNo ratings yet
- January 2011Document64 pagesJanuary 2011sake1978No ratings yet
- DEME Offshore Brochure_2022Document16 pagesDEME Offshore Brochure_2022amin32No ratings yet
- React Rich Text EditorDocument3 pagesReact Rich Text Editordhirendrapratapsingh398No ratings yet
- Delays in Endoscope Reprocessing and The Biofilms WithinDocument12 pagesDelays in Endoscope Reprocessing and The Biofilms WithinHAITHM MURSHEDNo ratings yet
- RJR Nabisco LBODocument14 pagesRJR Nabisco LBONazir Ahmad BahariNo ratings yet
- ATI, West Bengal: ATI Training Management Information SystemDocument11 pagesATI, West Bengal: ATI Training Management Information SystemNarayanaNo ratings yet
- Age Hardening Gold Alloys For JewelryDocument4 pagesAge Hardening Gold Alloys For JewelryReinol Eko SianturiNo ratings yet
- Customer Satisfaction in Maruti SuzukiDocument31 pagesCustomer Satisfaction in Maruti Suzukirajesh laddha100% (1)
- Exclusion and Lack of Accessibility in TheatreDocument12 pagesExclusion and Lack of Accessibility in TheatrebethanyslaterNo ratings yet
- Business PolicyDocument17 pagesBusiness PolicyManish SinghNo ratings yet
- Crash of Air France ConcordeDocument11 pagesCrash of Air France ConcordeAhmad Aimi SafuanNo ratings yet
- b1 Preliminary For Schools Classroom Posters and Activities PDFDocument13 pagesb1 Preliminary For Schools Classroom Posters and Activities PDFNat ShattNo ratings yet
- RD218 Gardan 3110 Ob2226657 NDocument1 pageRD218 Gardan 3110 Ob2226657 Nopen hartigNo ratings yet
- Document Revision TableDocument11 pagesDocument Revision Tableseva1969No ratings yet
- MSDS Slideway Oil Iso VG 68 - 031115Document6 pagesMSDS Slideway Oil Iso VG 68 - 031115Rini SiskayantiNo ratings yet
- B1 UDO Trace LogDocument14 pagesB1 UDO Trace LogCh M KashifNo ratings yet
- Number SystemDocument4 pagesNumber SystemGlenn ThomasNo ratings yet
- Manhole bill of materialsDocument1 pageManhole bill of materialsjalNo ratings yet
- Strategic Management and Municipal Financial ReportingDocument38 pagesStrategic Management and Municipal Financial ReportingMarius BuysNo ratings yet
- Astm D 2783 - 03Document9 pagesAstm D 2783 - 03Sérgio Luiz RodriguesNo ratings yet
- Uconnect User GuideDocument113 pagesUconnect User GuidetamilarasansrtNo ratings yet
- TQM 2 MARKSDocument12 pagesTQM 2 MARKSMARIYAPPANNo ratings yet
- Stage 112SE Manual FenderDocument8 pagesStage 112SE Manual FenderDjuang Septa KhalidaNo ratings yet