You might also like
- CS FourierDocument23 pagesCS FourierMuhammad ArslanNo ratings yet
- 06 SSA - CT Fourier TransformDocument17 pages06 SSA - CT Fourier TransformEssa Zulfikar SalasNo ratings yet
- The Fourier transform of sin(ω0t) is:Fsin(ω0t) = πδ(ω - ω0) - δ(ω + ω0)This follows from the fact that sin(ω0t) = (e^{jω0t} - e^{-jω0t})/2j and the Fourier transform property Fe^{jωt} = 2πδ(ω - ω0Document38 pagesThe Fourier transform of sin(ω0t) is:Fsin(ω0t) = πδ(ω - ω0) - δ(ω + ω0)This follows from the fact that sin(ω0t) = (e^{jω0t} - e^{-jω0t})/2j and the Fourier transform property Fe^{jωt} = 2πδ(ω - ω0Chernet TugeNo ratings yet
- EECE 442 - Chapter 2 - Fourier TransformDocument18 pagesEECE 442 - Chapter 2 - Fourier TransformKarim GhaddarNo ratings yet
- Fourier Transform Properties for Signal AnalysisDocument14 pagesFourier Transform Properties for Signal AnalysisHaris AsifNo ratings yet
- Fourier Transform Review: Key Properties and ApplicationsDocument6 pagesFourier Transform Review: Key Properties and Applicationsanoop.egNo ratings yet
- Fourier transform in 1D and 2DDocument110 pagesFourier transform in 1D and 2DMaram ShbairNo ratings yet
- 12 Fourier T XenDocument129 pages12 Fourier T Xenthuandvt97No ratings yet
- Lecture 10Document14 pagesLecture 10Totan PatraNo ratings yet
- CS589-04 Digital Image Processing Filtering in Frequency DomainDocument123 pagesCS589-04 Digital Image Processing Filtering in Frequency DomainAshish PatelNo ratings yet
- Chapter 4. Filtering in The Frequency Domain (1/2)Document34 pagesChapter 4. Filtering in The Frequency Domain (1/2)Ayoub MohammedNo ratings yet
- Fourier Trasnform Plus PropertiesDocument69 pagesFourier Trasnform Plus Propertiesnehal hasnain refathNo ratings yet
- Signals and Systems Class 12Document20 pagesSignals and Systems Class 12wizarderbrNo ratings yet
- W12 - Fourier Transform (Part 3)Document49 pagesW12 - Fourier Transform (Part 3)HermyraJ RobertNo ratings yet
- Noise Analysis v.21Document13 pagesNoise Analysis v.21Pelin KayaNo ratings yet
- Laplace Transform: Dr. Ajay Singh RaghuvanshiDocument66 pagesLaplace Transform: Dr. Ajay Singh RaghuvanshiBhaskarNo ratings yet
- Properties of The CTFTDocument4 pagesProperties of The CTFTravichandra429No ratings yet
- Continuous-Time Fourier Transform: Prof. Adnan KavakDocument14 pagesContinuous-Time Fourier Transform: Prof. Adnan Kavakhobi dunyamNo ratings yet
- CTMPDocument6 pagesCTMPTanya GuptaNo ratings yet
- FourierDocument49 pagesFourierEl Pepe El PepeNo ratings yet
- .1 Fourier Analysis For CT Signals and SystemsDocument2 pages.1 Fourier Analysis For CT Signals and SystemsYassine DjillaliNo ratings yet
- Window Fourier and Wavelet Transforms. Properties and Applications of WaveletsDocument23 pagesWindow Fourier and Wavelet Transforms. Properties and Applications of WaveletsAnshul SharmaNo ratings yet
- Continuous Time MPDocument5 pagesContinuous Time MPTanya GuptaNo ratings yet
- Lecture 8 ELE 301: Signals and SystemsDocument10 pagesLecture 8 ELE 301: Signals and SystemsKAGGHGNo ratings yet
- Fourier Transform and Pulses LabDocument9 pagesFourier Transform and Pulses LabKthiha CnNo ratings yet
- ELEC221 HW04 Winter2023-1Document16 pagesELEC221 HW04 Winter2023-1Isha ShuklaNo ratings yet
- ELE301 Lecture 8 SummaryDocument19 pagesELE301 Lecture 8 SummaryAaqib Hussain ShahNo ratings yet
- Signals and Systems Class 17Document23 pagesSignals and Systems Class 17wizarderbrNo ratings yet
- ENGG2310A (Fall 2018) : Problem 1-1Document11 pagesENGG2310A (Fall 2018) : Problem 1-1Tsz Wing YipNo ratings yet
- Chapter 3: Dynamic ResponseDocument78 pagesChapter 3: Dynamic ResponseAhmedSalahNo ratings yet
- Fourier Transform Pairs and PropertiesDocument55 pagesFourier Transform Pairs and PropertiesRakshak AgarwalNo ratings yet
- 訊號與系統第四章Document69 pages訊號與系統第四章電機甲09吳仁中No ratings yet
- En3 The Fourier TransformDocument4 pagesEn3 The Fourier TransformAna-Maria Raluca ChiruNo ratings yet
- 1 SB5103 FourierSeries FourierTransform ModDocument59 pages1 SB5103 FourierSeries FourierTransform ModGandhi NapitupuluNo ratings yet
- FT PropertiesDocument15 pagesFT PropertiesahmdNo ratings yet
- Universidad Tecnológica de Bolívar: e A T XDocument5 pagesUniversidad Tecnológica de Bolívar: e A T XMy citaraNo ratings yet
- CSE - 610 Lecture # 4Document32 pagesCSE - 610 Lecture # 4zaidNo ratings yet
- FourintDocument8 pagesFourintahmed awsiNo ratings yet
- HW 5Document2 pagesHW 5Kuann CNo ratings yet
- L3: Linear, Time-Invariant (LTI) Systems and Linear DistortionDocument25 pagesL3: Linear, Time-Invariant (LTI) Systems and Linear DistortionHunter VerneNo ratings yet
- Formulas (EXAM)Document3 pagesFormulas (EXAM)Thanh Dat NguyenNo ratings yet
- 2.signal and Linear System AnalysisDocument42 pages2.signal and Linear System Analysis390f.lkajfiNo ratings yet
- Fourier Transform Properties and ExamplesDocument14 pagesFourier Transform Properties and ExamplesmfchinNo ratings yet
- Unit - 3.2 Analysis of CT SysDocument97 pagesUnit - 3.2 Analysis of CT SysmakNo ratings yet
- Unit - 3.2 Analysis of CT SysDocument97 pagesUnit - 3.2 Analysis of CT SysmakNo ratings yet
- Unit - 3.2 Analysis of CT SysDocument97 pagesUnit - 3.2 Analysis of CT SysmakNo ratings yet
- Signals and Systems: CE/EE301Document21 pagesSignals and Systems: CE/EE301Abdelrhman MahfouzNo ratings yet
- Introduction to Random ProcessesDocument61 pagesIntroduction to Random Processesfouzia_qNo ratings yet
- Lecture 23Document10 pagesLecture 23MichaelNo ratings yet
- Lecture02 FT 1DDocument87 pagesLecture02 FT 1DMd Nur-A-Adam DonyNo ratings yet
- The Fast Fourier Transform: (And DCT Too )Document36 pagesThe Fast Fourier Transform: (And DCT Too )Sri NivasNo ratings yet
- 5-1 Introduction: Chapter 5 The Laplace TransformDocument25 pages5-1 Introduction: Chapter 5 The Laplace TransformpatangkaNo ratings yet
- EE 422G Notes: Chapter 5 Laplace TransformDocument25 pagesEE 422G Notes: Chapter 5 Laplace TransformranaqasimranaNo ratings yet
- Homework 3 posted, midterm info, final project detailsDocument26 pagesHomework 3 posted, midterm info, final project detailsHermain KarimNo ratings yet
- Hilbert TransformDocument15 pagesHilbert TransformharshaNo ratings yet
- Laplace Transforms1Document81 pagesLaplace Transforms1MoslemaWaftakherNo ratings yet
- Random Processes: Saravanan Vijayakumaran Sarva@ee - Iitb.ac - inDocument10 pagesRandom Processes: Saravanan Vijayakumaran Sarva@ee - Iitb.ac - inSonu kumarNo ratings yet
- Fallsem2019-20 Ece1004 Eth VL2019201000770 Cat-2 QP Key Cat 2 SSDocument4 pagesFallsem2019-20 Ece1004 Eth VL2019201000770 Cat-2 QP Key Cat 2 SSPina NasaNo ratings yet
- Matlab Methods For OdeDocument16 pagesMatlab Methods For OdeGrassrehLeNo ratings yet
- Change RevisionDocument16 pagesChange RevisionCanio NoceNo ratings yet
- m02 PhysicsDocument213 pagesm02 PhysicsCanio NoceNo ratings yet
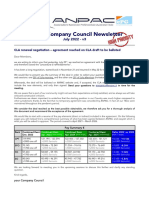
- CC Newsletter - July 2022 - v4Document2 pagesCC Newsletter - July 2022 - v4Canio NoceNo ratings yet
- CC Newsletter - July 2022 - v3Document4 pagesCC Newsletter - July 2022 - v3Canio NoceNo ratings yet
- Tutorial .SECOND LAW OF THERMODYNAMICSDocument2 pagesTutorial .SECOND LAW OF THERMODYNAMICSUsaamah CassimNo ratings yet
- Angle of ReposeDocument3 pagesAngle of ReposeUmar Farouq Mohammed GalibNo ratings yet
- Norma MAT2004Document12 pagesNorma MAT2004Marcelo Carvalho100% (1)
- Albert, David - Quantum Mechanics and ExperienceDocument108 pagesAlbert, David - Quantum Mechanics and Experiencekarenhunt9583% (6)
- Space Structures Principles and PracticeDocument8 pagesSpace Structures Principles and PracticeBoby culiusNo ratings yet
- Business CalculusDocument272 pagesBusiness CalculusMaye Zuñiga Garcia100% (1)
- 8663 - Solutions For AS A Level Year 1 Edexcel Stats Mechanics Expert Set A v1.1Document20 pages8663 - Solutions For AS A Level Year 1 Edexcel Stats Mechanics Expert Set A v1.1Cherie Chow50% (2)
- GebalgaDocument6 pagesGebalgafaptolewdNo ratings yet
- Thermal Radiation PresentationDocument42 pagesThermal Radiation PresentationRajan PrasadNo ratings yet
- MTH108 Courseoutline F2023Document7 pagesMTH108 Courseoutline F2023ahmeddhillon1No ratings yet
- ENEC Serie 221 RichtigDocument45 pagesENEC Serie 221 RichtigAli KayaNo ratings yet
- Engineering Design & Specifications of Cyclone SeparatorDocument7 pagesEngineering Design & Specifications of Cyclone SeparatorFederico DalingerNo ratings yet
- Python GUI For Impedance Spectroscopy Analysis: Scientia Cum Industria August 2018Document6 pagesPython GUI For Impedance Spectroscopy Analysis: Scientia Cum Industria August 2018Tomás de AlmeidaNo ratings yet
- MPI Detects Surface FlawsDocument172 pagesMPI Detects Surface FlawsRamesh RNo ratings yet
- What Is Image Processing?Document5 pagesWhat Is Image Processing?JggNo ratings yet
- AP Physics 1 Past Frqs (2018, 19,21,22.23)Document70 pagesAP Physics 1 Past Frqs (2018, 19,21,22.23)Mahmood ShanaahNo ratings yet
- EHTIC 1A Semester Test 4 S2 2021Document4 pagesEHTIC 1A Semester Test 4 S2 2021MABUKE NDINAINWI INNOCENTIANo ratings yet
- WB Harmonic Shaker TableDocument10 pagesWB Harmonic Shaker TablenetkasiaNo ratings yet
- Silvaco TCAD Tutorial MOSDocument286 pagesSilvaco TCAD Tutorial MOSThomas Ho100% (4)
- Cone Fenders: Construction: Dockguard Cone Fenders Offer The Most Advanced Cone FenderDocument5 pagesCone Fenders: Construction: Dockguard Cone Fenders Offer The Most Advanced Cone FenderG GunawanNo ratings yet
- SYLLABUS MATHEMATICS PRE-PhD ENTRANCE TESTDocument2 pagesSYLLABUS MATHEMATICS PRE-PhD ENTRANCE TESTSanket K MohareNo ratings yet
- IPMSM control using MTPA based adaptive fractional sliding modeDocument13 pagesIPMSM control using MTPA based adaptive fractional sliding modeKev NgoNo ratings yet
- Mathematics Question Paper Set CDocument3 pagesMathematics Question Paper Set CADITHYA SUJINo ratings yet
- Lesson 2 Changes in MatterDocument27 pagesLesson 2 Changes in MatterMay Khin NyeinNo ratings yet
- Intuitive Intelligence: Accessing The Wisdom of Head, Heart and HaraDocument5 pagesIntuitive Intelligence: Accessing The Wisdom of Head, Heart and HaradNo ratings yet
- Intenship Report Sumit Nagar PDFDocument14 pagesIntenship Report Sumit Nagar PDFSumit NagarNo ratings yet
- VeriVide CAC LED Datasheet 2019Document2 pagesVeriVide CAC LED Datasheet 2019Arthur ThiesenNo ratings yet
- General Form of Faraday's Law: D Eds DTDocument40 pagesGeneral Form of Faraday's Law: D Eds DTGadis Kebun BungaNo ratings yet
- Fast Transient Overvoltage in SubstationDocument8 pagesFast Transient Overvoltage in Substationjegadeesh kumarNo ratings yet
- Quadrotor Quaternion Control: June 2015Document8 pagesQuadrotor Quaternion Control: June 2015nguyễn công nghĩaNo ratings yet