You might also like
- Title - Traffic Sign Detection Using Convolutional Neural NetworkDocument15 pagesTitle - Traffic Sign Detection Using Convolutional Neural NetworkPranav TandonNo ratings yet
- Traffic Sign DetectionDocument5 pagesTraffic Sign DetectionSameer SinghNo ratings yet
- Image Processing Applied To TrafficDocument13 pagesImage Processing Applied To TrafficDivya SreeNo ratings yet
- Traffic Sign Detection Using Convolutional Neural Network: TitleDocument15 pagesTraffic Sign Detection Using Convolutional Neural Network: TitlePranav TandonNo ratings yet
- Presented by K.Shiva Shankar Reddy (Ii Cse) & K.Srinivasa Rao (Ii Cse)Document15 pagesPresented by K.Shiva Shankar Reddy (Ii Cse) & K.Srinivasa Rao (Ii Cse)api-19799369No ratings yet
- Samay Gupta SynopsisDocument9 pagesSamay Gupta Synopsissamay guptaNo ratings yet
- Design and Implementation of Viterbi Decoder Using VHDL: IOP Conference Series: Materials Science and EngineeringDocument7 pagesDesign and Implementation of Viterbi Decoder Using VHDL: IOP Conference Series: Materials Science and Engineeringkrishna mohan pandeyNo ratings yet
- IEEE PROJECTS 2011-12: DSP Proje CtsDocument17 pagesIEEE PROJECTS 2011-12: DSP Proje CtsVatsalya HaveliyaNo ratings yet
- Cloning Safe Driving Behavior For Self-D PDFDocument8 pagesCloning Safe Driving Behavior For Self-D PDFGitanjaliNo ratings yet
- DIGITAL IMAGE PROCESSING2 PresentationDocument16 pagesDIGITAL IMAGE PROCESSING2 PresentationKavya ChumNo ratings yet
- Pedestrian Detection System Based On Deep LearningDocument5 pagesPedestrian Detection System Based On Deep LearningInternational Journal of Advances in Applied Sciences (IJAAS)No ratings yet
- ECRU: An Encoder-Decoder Based Convolution Neural Network (CNN) For Road-Scene UnderstandingDocument19 pagesECRU: An Encoder-Decoder Based Convolution Neural Network (CNN) For Road-Scene UnderstandingJavi ColorsNo ratings yet
- Efficient Lightweight Residual Network For Real-Time Road Semantic SegmentationDocument8 pagesEfficient Lightweight Residual Network For Real-Time Road Semantic SegmentationIAES IJAINo ratings yet
- Editor 4Document15 pagesEditor 4Licence Spécialisée Idbd EnsakNo ratings yet
- Vision Transformer Based Audio Classification Using Patch-Level Feature FusionDocument5 pagesVision Transformer Based Audio Classification Using Patch-Level Feature FusioncacaNo ratings yet
- Traffic Sign Detection and Recognition Using Image ProcessingDocument7 pagesTraffic Sign Detection and Recognition Using Image ProcessingIJRASETPublicationsNo ratings yet
- Half-Broken Rotor Bar Detection On IM by Using Sparse Representation Under Different Load ConditionsDocument5 pagesHalf-Broken Rotor Bar Detection On IM by Using Sparse Representation Under Different Load Conditionskais alviNo ratings yet
- (IJETA-V10I1P1) :M.Thachayani, G.RubavaniDocument3 pages(IJETA-V10I1P1) :M.Thachayani, G.RubavaniIJETA - EighthSenseGroupNo ratings yet
- Automatic Traffic Sign Detection and Recognition Using Deeplearning For Autonomous Driverless VehiclesDocument4 pagesAutomatic Traffic Sign Detection and Recognition Using Deeplearning For Autonomous Driverless VehiclesMOHAMMED HUSSAIN ANo ratings yet
- A 12.08 - TOPS W All-Digital Time-Domain CNN Engine Using Bi-Directional Memory Delay Lines For Energy Efficient Edge ComputingDocument16 pagesA 12.08 - TOPS W All-Digital Time-Domain CNN Engine Using Bi-Directional Memory Delay Lines For Energy Efficient Edge Computing于富昇No ratings yet
- Face Identification Using Kinect Technology: Ana-Andreea Nagâţ, Cătălin-Daniel CăleanuDocument4 pagesFace Identification Using Kinect Technology: Ana-Andreea Nagâţ, Cătălin-Daniel Căleanuworldofd12No ratings yet
- Detection of Indian Traffic SignDocument6 pagesDetection of Indian Traffic SignIJSTENo ratings yet
- Proceeding of The 3rd International Conference On Informatics and TechnologyDocument6 pagesProceeding of The 3rd International Conference On Informatics and TechnologyfakapNo ratings yet
- Digital Image Processing Project ReportDocument11 pagesDigital Image Processing Project ReportPrachi GargNo ratings yet
- The Novel Broadcast Encryption Method For Large Dynamically Changing User GroupsDocument8 pagesThe Novel Broadcast Encryption Method For Large Dynamically Changing User GroupsRavindra KumarNo ratings yet
- Classifying Analog and Digital Circuits With Machine Learning Techniques Toward Mixed-Signal Design AutomationDocument4 pagesClassifying Analog and Digital Circuits With Machine Learning Techniques Toward Mixed-Signal Design AutomationGuru VelmathiNo ratings yet
- Autoencoders Based Digital Communication SystemsDocument5 pagesAutoencoders Based Digital Communication SystemsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Conference Template A4 (1) 4Document5 pagesConference Template A4 (1) 4Imad EL MallahiNo ratings yet
- Document Traffic SignalDocument32 pagesDocument Traffic Signalbalaji xeroxNo ratings yet
- Noise Removal in Traffic Sign Detection SystemsDocument9 pagesNoise Removal in Traffic Sign Detection SystemscseijNo ratings yet
- Traffic Sign Classification ReportDocument2 pagesTraffic Sign Classification Reportaswini kurraNo ratings yet
- Traffic Sign Recognition System Using CNNDocument7 pagesTraffic Sign Recognition System Using CNNInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- 5400-Article Text-16592-1-10-20131010Document4 pages5400-Article Text-16592-1-10-20131010Shree Raksha RNo ratings yet
- Iceans Paper 3-A Simplified Traffic Sign Detection and Recognition System Using Convolutional Neural NetworksDocument11 pagesIceans Paper 3-A Simplified Traffic Sign Detection and Recognition System Using Convolutional Neural NetworksMUHAMMAD ABUBAKAR SADIQNo ratings yet
- PreprintTraffic Sign Detection NeurocomputingDocument26 pagesPreprintTraffic Sign Detection Neurocomputingami videogameNo ratings yet
- Real Time Image Processing Applied To Traffic Queue Detection AlgorithmDocument17 pagesReal Time Image Processing Applied To Traffic Queue Detection Algorithmshajin2233No ratings yet
- CNN Architecture Applied For Filter Bank DetectionDocument13 pagesCNN Architecture Applied For Filter Bank DetectionLicence Spécialisée Idbd EnsakNo ratings yet
- Deep Neural Network-Based Automatic Modulation Classification TechniqueDocument4 pagesDeep Neural Network-Based Automatic Modulation Classification TechniquesurabhiNo ratings yet
- Colour Image Watermarking Based On Wavelet and QR DecompositionDocument4 pagesColour Image Watermarking Based On Wavelet and QR DecompositionAnonymous 1aqlkZNo ratings yet
- Real-Time Image Processing Applied To Traffic - Queue Detection AlgorithmDocument12 pagesReal-Time Image Processing Applied To Traffic - Queue Detection Algorithmapi-26172869No ratings yet
- Abstract For Mini ProjectDocument5 pagesAbstract For Mini ProjectMOHAMMED HUSSAIN ANo ratings yet
- Nietjet 0602S 2018 003Document5 pagesNietjet 0602S 2018 003NIET Journal of Engineering & Technology(NIETJET)No ratings yet
- Density Based Smart Traffic Control System Using CDocument8 pagesDensity Based Smart Traffic Control System Using CTimNo ratings yet
- UNETR: Transformers For 3D Medical Image SegmentationDocument11 pagesUNETR: Transformers For 3D Medical Image SegmentationBashar ShamiNo ratings yet
- A Novel Methodology For Identification of Unclassified Digital VoiceDocument6 pagesA Novel Methodology For Identification of Unclassified Digital VoiceInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Real-Time Image Processing Applied To Traffic-Queue Detection AlgorithmDocument18 pagesReal-Time Image Processing Applied To Traffic-Queue Detection AlgorithmAnoop RaviNo ratings yet
- ML Algorithms Review - ImportantDocument16 pagesML Algorithms Review - Importantsaksham dixitNo ratings yet
- On Board Complete Traffic Signalling System Using Image ProcessingDocument7 pagesOn Board Complete Traffic Signalling System Using Image ProcessingIJRASETPublicationsNo ratings yet
- Colour Image Watermarking Based On Wavelet and QR DecompositionDocument4 pagesColour Image Watermarking Based On Wavelet and QR DecompositionAnonymous 1aqlkZNo ratings yet
- Colour Image Watermarking Based On Wavelet and QR DecompositionDocument4 pagesColour Image Watermarking Based On Wavelet and QR DecompositionAnonymous 1aqlkZNo ratings yet
- Optimal Transmitter Power Control in Interleave Division Multiple Access (IDMA) Spread Spectrum Uplink ChannelsDocument22 pagesOptimal Transmitter Power Control in Interleave Division Multiple Access (IDMA) Spread Spectrum Uplink ChannelsMostafa BayomeNo ratings yet
- Ant-Colony Based Optimal MC-CDMA Multiuser Detector: Samer L. Hijazi Andrew J. Best Balasubramaniam Natarajan Sanjoy DasDocument5 pagesAnt-Colony Based Optimal MC-CDMA Multiuser Detector: Samer L. Hijazi Andrew J. Best Balasubramaniam Natarajan Sanjoy DasUmer JavedNo ratings yet
- Lane - NIT-1Document11 pagesLane - NIT-1narendra29000No ratings yet
- Road Damage Monitoring and ControlDocument50 pagesRoad Damage Monitoring and ControlRaji PNo ratings yet
- Electronics: An Improved Fault Diagnosis Using 1D-Convolutional Neural Network ModelDocument19 pagesElectronics: An Improved Fault Diagnosis Using 1D-Convolutional Neural Network ModelSerosh KarimNo ratings yet
- Image Processing Applications To Determine The Lane Center For Autonomous Vehicle - SubmittedDocument5 pagesImage Processing Applications To Determine The Lane Center For Autonomous Vehicle - Submittedtrongtu4No ratings yet
- Pathan-Memon2020 Article AnalyzingTheImpactOfSigma-DeltDocument11 pagesPathan-Memon2020 Article AnalyzingTheImpactOfSigma-DeltShiv Ram MeenaNo ratings yet
- Helmet Detection System Using Mask R-CNNDocument8 pagesHelmet Detection System Using Mask R-CNNbryansantoso8585No ratings yet
- Design and Implemation of An Enhanced Dds Based Digital Modulator For Multiple Modulation Schemes Manoj Kollam, S.A.S Krishna Chaithanya and Nagaraju Kommu IJSSAN 2011Document6 pagesDesign and Implemation of An Enhanced Dds Based Digital Modulator For Multiple Modulation Schemes Manoj Kollam, S.A.S Krishna Chaithanya and Nagaraju Kommu IJSSAN 2011John JohnstonNo ratings yet
- The Use Of-Critical Path Modeling To Analyze Production in Underground MinesDocument15 pagesThe Use Of-Critical Path Modeling To Analyze Production in Underground MinesRENZO ANDRE GONZALES MALDONADONo ratings yet
- Project Measurements: Period in Project:: Date: Project Accounting Number: Project Phase: Source FilesDocument4 pagesProject Measurements: Period in Project:: Date: Project Accounting Number: Project Phase: Source FilesInfo CosmodotNo ratings yet
- Domingo P. Boquiren Nhs Swot Analysis in APDocument21 pagesDomingo P. Boquiren Nhs Swot Analysis in APJoshua JoshuaNo ratings yet
- TNote Fog PDFDocument4 pagesTNote Fog PDFayviwurbayviwurbNo ratings yet
- Definition of Term in Police PhotographyDocument7 pagesDefinition of Term in Police PhotographyJoshua D None-NoneNo ratings yet
- P O W E R Learning Strategies For Success in College and Life 9Th Edition Robert Feldman Full Chapter PDF ScribdDocument67 pagesP O W E R Learning Strategies For Success in College and Life 9Th Edition Robert Feldman Full Chapter PDF Scribdsteven.hendrix700100% (6)
- Stamp2G 2019.5.multi Job DirectDocument2 pagesStamp2G 2019.5.multi Job DirectUnai Aranzabal UrcelayNo ratings yet
- Composite Structures: A. Manalo, T. Aravinthan, W. Karunasena, A. TicoaluDocument9 pagesComposite Structures: A. Manalo, T. Aravinthan, W. Karunasena, A. Ticoalupradeep kankeriNo ratings yet
- Assessment Submission Sheet: Australian Ideal CollegeDocument18 pagesAssessment Submission Sheet: Australian Ideal CollegeBishal GaneshNo ratings yet
- Texas Area Code - Google SearchDocument1 pageTexas Area Code - Google SearchkolawoleNo ratings yet
- Mohammad Gufran Inst. Tech - MaintenanceDocument3 pagesMohammad Gufran Inst. Tech - Maintenancerazaullahkhan37No ratings yet
- Harshit Kumar ReportDocument60 pagesHarshit Kumar ReportHarshit RajNo ratings yet
- 03-GRIHA V-2019 Design Guideline On ENERGY EFFICIENCY - For Electrical ConsultantDocument16 pages03-GRIHA V-2019 Design Guideline On ENERGY EFFICIENCY - For Electrical Consultantyuva_86No ratings yet
- Marine Control System Lab ManualDocument65 pagesMarine Control System Lab ManualJawwad AhmedNo ratings yet
- Understanding Operating System HardeningDocument11 pagesUnderstanding Operating System HardeningKarl Alvin Reyes HipolitoNo ratings yet
- Kmbn207 Dmec Unit IIIDocument17 pagesKmbn207 Dmec Unit IIIArchi VarshneyNo ratings yet
- NBK TA Brochure 2016-EmailDocument11 pagesNBK TA Brochure 2016-EmailPietrus NimbusNo ratings yet
- SM4001 AiTComponentsDocument5 pagesSM4001 AiTComponentsjulio cubillaNo ratings yet
- TNB Tariff BookDocument14 pagesTNB Tariff BookRamani KrishnamoorthyNo ratings yet
- Electrical Bushing Adapter - Product Picture From Yueqing Yingdete Electric Co., LTDDocument2 pagesElectrical Bushing Adapter - Product Picture From Yueqing Yingdete Electric Co., LTDĐoàn Ngọc ĐạiNo ratings yet
- 5.6 KeyDocument2 pages5.6 KeyjuniaNo ratings yet
- Directional (Yaw) Stability AnalysisDocument7 pagesDirectional (Yaw) Stability AnalysisHarshini AichNo ratings yet
- Empowerment Technology (Lesson 2)Document9 pagesEmpowerment Technology (Lesson 2)Zahjid CallangNo ratings yet
- Introduction To Hook Length Formula PDFDocument4 pagesIntroduction To Hook Length Formula PDFmichael scottNo ratings yet
- Queueing Theory: Queueing Theory Is The Mathematical Study of Waiting Lines, orDocument12 pagesQueueing Theory: Queueing Theory Is The Mathematical Study of Waiting Lines, orGabrielNo ratings yet
- Module1 Prelim Activity&CaseAnalysisDocument8 pagesModule1 Prelim Activity&CaseAnalysisKirk anthony TripoleNo ratings yet
- Repair KeretaDocument17 pagesRepair KeretaIefa Shafie100% (3)
- Orca Share Media1678577044291 7040462411179493427Document12 pagesOrca Share Media1678577044291 7040462411179493427Zarylle De AsasNo ratings yet
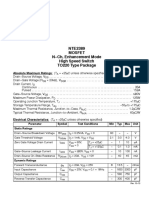
- NTE2389 Mosfet N CH, Enhancement Mode High Speed Switch TO220 Type PackageDocument2 pagesNTE2389 Mosfet N CH, Enhancement Mode High Speed Switch TO220 Type PackagetoroalNo ratings yet
- Long Term Evolution: Author: Badal MishraDocument19 pagesLong Term Evolution: Author: Badal Mishrabadal mishraNo ratings yet