You might also like
- Equivalent Frame Method SampleDocument25 pagesEquivalent Frame Method SampleReiBañezNo ratings yet
- UNS Thread ASME B1.1-2003Document2 pagesUNS Thread ASME B1.1-2003Atul BedekarNo ratings yet
- Starrett Reference Table (Hi-Res)Document18 pagesStarrett Reference Table (Hi-Res)Richard LawrenceNo ratings yet
- Metric Bolt Properties, Grades, and StrengthDocument7 pagesMetric Bolt Properties, Grades, and Strengthgemo_n_fabrice69No ratings yet
- Power Screw Sir GDocument34 pagesPower Screw Sir GGodwill EscabelNo ratings yet
- Reinforced Concrete Chapter 2Document24 pagesReinforced Concrete Chapter 2Yena CabaluNo ratings yet
- Part Book Cylinder Hydraulic CraneDocument52 pagesPart Book Cylinder Hydraulic Craneandywahyudi99No ratings yet
- Din 76-1Document5 pagesDin 76-1Emmanuel100% (1)
- S02 Rock DrillDocument24 pagesS02 Rock Drillroland100% (1)
- Iso 4014Document16 pagesIso 4014Emílio BeckerNo ratings yet
- Lecture 4 - Flexure: June 9, 2003 CVEN 444Document48 pagesLecture 4 - Flexure: June 9, 2003 CVEN 444chiranjeevi02No ratings yet
- Chapter One: (I) Load To Be Lifted., and (Ii) Height of LiftDocument21 pagesChapter One: (I) Load To Be Lifted., and (Ii) Height of Liftmailme_abhishu55100% (2)
- Reinforced Concrete Structures - Homework 2: MEEES 2017-2018 Master in Earthquake Engineering and Engineering SeismologyDocument10 pagesReinforced Concrete Structures - Homework 2: MEEES 2017-2018 Master in Earthquake Engineering and Engineering SeismologyFelipe Ignacio Alarcon ArayaNo ratings yet
- EE 218 - Lecture 3 Generation Shift Factors-2018-06Document23 pagesEE 218 - Lecture 3 Generation Shift Factors-2018-06riley09002No ratings yet
- Flexure Working Stress Analysis and DesignDocument49 pagesFlexure Working Stress Analysis and DesignOraib AljaafrehNo ratings yet
- Power System Analysis (Uee509)Document17 pagesPower System Analysis (Uee509)KANWALPREET SINGH TIWANANo ratings yet
- CH 8Document16 pagesCH 8Omar AbdullahNo ratings yet
- CIE3150 2017 Case Study Beam V 03-2Document19 pagesCIE3150 2017 Case Study Beam V 03-2FerdiVKNo ratings yet
- Module 3Document51 pagesModule 3ShreenidhiNo ratings yet
- Module 3Document51 pagesModule 3Chandru VelNo ratings yet
- Design of Machine Elements: Nivish GeorgeDocument51 pagesDesign of Machine Elements: Nivish GeorgeShreenidhiNo ratings yet
- Module 3Document51 pagesModule 3ShreenidhiNo ratings yet
- Chapter One Analysis and Design of Column: Reinforced Concrete Structure - IiDocument29 pagesChapter One Analysis and Design of Column: Reinforced Concrete Structure - IiAbduljebar HussienNo ratings yet
- Article: Stepped Hss T-And Cross - Connections Under Branch In-Plane and Out - Of-Plane BendingDocument5 pagesArticle: Stepped Hss T-And Cross - Connections Under Branch In-Plane and Out - Of-Plane Bendinggv Sathishkumar KumarNo ratings yet
- Dynamic Modelling of Induction Motor:: Class Notes - 4 Shabbar A. Vejlani (2009A3PS049G)Document7 pagesDynamic Modelling of Induction Motor:: Class Notes - 4 Shabbar A. Vejlani (2009A3PS049G)Savan RathodNo ratings yet
- Dynamic Modelling of Induction Motor:: Class Notes - 4 Shabbar A. Vejlani (2009A3PS049G)Document7 pagesDynamic Modelling of Induction Motor:: Class Notes - 4 Shabbar A. Vejlani (2009A3PS049G)Savan RathodNo ratings yet
- Emg 2303 - 2Document15 pagesEmg 2303 - 2steve ogagaNo ratings yet
- EMII - Lecture 19 - Induction MachinesDocument20 pagesEMII - Lecture 19 - Induction MachinesHassan Al BaityNo ratings yet
- Statik Und Festigkeitslehre (STAFL)Document9 pagesStatik Und Festigkeitslehre (STAFL)Zhengyi GuoNo ratings yet
- VI. Conclusion:: + 2 2 ( ) Cos + ( ) Tan SinDocument3 pagesVI. Conclusion:: + 2 2 ( ) Cos + ( ) Tan SinMontaser MiskawiNo ratings yet
- Lecture-35 Torque From Salient Pole Synchronous Motor 10oct17 PDFDocument16 pagesLecture-35 Torque From Salient Pole Synchronous Motor 10oct17 PDFPulkit MehtaNo ratings yet
- Me 354 Lab #4: Discussion of The Torsion TestDocument13 pagesMe 354 Lab #4: Discussion of The Torsion TestKHairil AdZharNo ratings yet
- Inno2020 - T1 - Screws, Fasteners, and The Design of Non-Permanent JointsDocument15 pagesInno2020 - T1 - Screws, Fasteners, and The Design of Non-Permanent JointsGhostNo ratings yet
- Inno2020 - T2 - Screws, Fasteners, and The Design of Non-Permanent JointsDocument22 pagesInno2020 - T2 - Screws, Fasteners, and The Design of Non-Permanent JointsGhostNo ratings yet
- Sweeney MECH610 ProjectDocument19 pagesSweeney MECH610 Projectعبدالرحمن احمدNo ratings yet
- Drill-10 - Engineering MechanicsDocument24 pagesDrill-10 - Engineering MechanicsTine AbellanosaNo ratings yet
- Design and Construction of A Connecting Rod PDFDocument21 pagesDesign and Construction of A Connecting Rod PDFTeshome Dengiso0% (1)
- Practise Problems Set02Document5 pagesPractise Problems Set02rohit kumarNo ratings yet
- Chapter IIDocument5 pagesChapter IIMica BisaresNo ratings yet
- CH 4Document22 pagesCH 4Ala HijaziNo ratings yet
- TORSIONDocument25 pagesTORSIONMelanie SamsonaNo ratings yet
- ForceDocument45 pagesForcefastidious_5No ratings yet
- Design DC and Ac Load Lines - Fall 2022Document5 pagesDesign DC and Ac Load Lines - Fall 2022Amera AdilNo ratings yet
- Chapter III - TorsionDocument19 pagesChapter III - TorsionMostafa Essam Ezzat MahmoudNo ratings yet
- Unit 5Document8 pagesUnit 5Dalton ChanNo ratings yet
- Load DistributionDocument44 pagesLoad Distributionሽታ ዓለሜNo ratings yet
- Chapter 5Document17 pagesChapter 5Robel MetikuNo ratings yet
- Lecture 2 Stress ApplicationsDocument9 pagesLecture 2 Stress ApplicationsHussein AssamNo ratings yet
- AISC Iiia PDFDocument19 pagesAISC Iiia PDFgmlopesNo ratings yet
- Buckling ExamplesDocument5 pagesBuckling ExamplesSrivatsan SampathNo ratings yet
- Rocket Propulsion Part IDocument9 pagesRocket Propulsion Part IMohamed KhairyNo ratings yet
- Basic Electrical by Jahir Sir 1Document7 pagesBasic Electrical by Jahir Sir 1Sakib ruNo ratings yet
- Columns: 2 Order Moments in Sway and Non-Sway FramesDocument62 pagesColumns: 2 Order Moments in Sway and Non-Sway FramesMISKIR TADESSENo ratings yet
- Assignment 5: Non-Linear Lateral Tire Dynamics: Parameter Value UnitDocument3 pagesAssignment 5: Non-Linear Lateral Tire Dynamics: Parameter Value Unitshashank saiNo ratings yet
- Chapter 3 Lightning Phenomena and Protection Systems: Problem 3.1Document9 pagesChapter 3 Lightning Phenomena and Protection Systems: Problem 3.1Nouman ChoudhryNo ratings yet
- DOM-I-Force Analysis PDFDocument26 pagesDOM-I-Force Analysis PDFNaveenKrishNo ratings yet
- 10 11648 J Ijmea 20160405 12Document6 pages10 11648 J Ijmea 20160405 12AYKUTNo ratings yet
- pILE DETAILS 4Document9 pagespILE DETAILS 4vraj ShahNo ratings yet
- 1B. - Tension Members Ce134p-2 - EscruzDocument33 pages1B. - Tension Members Ce134p-2 - EscruzAireesha GozeNo ratings yet
- Clutch Lab Sheet 2018Document6 pagesClutch Lab Sheet 2018Gabriel VaughnNo ratings yet
- Yield LocusDocument36 pagesYield Locusshanthakumar100% (1)
- Lecture 3 Power Screws 1Document30 pagesLecture 3 Power Screws 1Abdelrahman yasser ZaghloulNo ratings yet
- Virtual Work and Potential Energy: Quiz SM107Document15 pagesVirtual Work and Potential Energy: Quiz SM107Sumit RijalNo ratings yet
- Analysis of Tapered Beam Piezoelectric Energy HarvestersDocument4 pagesAnalysis of Tapered Beam Piezoelectric Energy HarvestersshikhamaharanaNo ratings yet
- CH 8: Screws, Fasteners, and The Design of Non-Permanent JointsDocument15 pagesCH 8: Screws, Fasteners, and The Design of Non-Permanent JointsBhuwaneshwar DahalNo ratings yet
- Scanned With CamscannerDocument18 pagesScanned With CamscannerSubhranil SahaNo ratings yet
- New Doc 2020-02-08 21.23.44Document29 pagesNew Doc 2020-02-08 21.23.44Subhranil SahaNo ratings yet
- DOM Upto10 02Document26 pagesDOM Upto10 02Subhranil SahaNo ratings yet
- 18UME006 - VibrationControl - Assignment - Sep 13, 2021Document13 pages18UME006 - VibrationControl - Assignment - Sep 13, 2021Subhranil SahaNo ratings yet
- Vibration AssignmentDocument2 pagesVibration AssignmentSubhranil SahaNo ratings yet
- All Drawers DrawingDocument20 pagesAll Drawers DrawingwisamNo ratings yet
- TBIMOTION RotarySeries 19.09 (EN) PDFDocument25 pagesTBIMOTION RotarySeries 19.09 (EN) PDFscooba84No ratings yet
- Vadi Lal DesaiDocument16 pagesVadi Lal DesaiVadilal Desai & Co.No ratings yet
- ASME 2A - 2B - Inch Thread CalculatorDocument8 pagesASME 2A - 2B - Inch Thread CalculatorBruno GondimNo ratings yet
- LW160-1 S - N 1001-Up - Control Box (2 - 2)Document2 pagesLW160-1 S - N 1001-Up - Control Box (2 - 2)BillNo ratings yet
- Ballscrew Product SpecificationsDocument30 pagesBallscrew Product SpecificationsrogeriofcrealNo ratings yet
- A Built-Up: BOQ. NO.: 1 Project: REV - No. R0 Date: 11-Jul-18 Detailer: Priya Designer: Anuj Grand Total in KG.Document2 pagesA Built-Up: BOQ. NO.: 1 Project: REV - No. R0 Date: 11-Jul-18 Detailer: Priya Designer: Anuj Grand Total in KG.Vishal kumarNo ratings yet
- Ab at InventoryDocument32 pagesAb at InventoryecirecirNo ratings yet
- Traning16 07 05Document58 pagesTraning16 07 05Đăng PhạmNo ratings yet
- Fasteners PDFDocument42 pagesFasteners PDFPaco LMNo ratings yet
- Thread Pitch Chart: Imperial & Metric Tap & Drill Chart: Imperial & MetricDocument1 pageThread Pitch Chart: Imperial & Metric Tap & Drill Chart: Imperial & MetricDave BournNo ratings yet
- Astm F568M: ASTM F568M Is An ASTM International Standard For Metric Bolts, Screws and Studs That Are Used in GeneralDocument3 pagesAstm F568M: ASTM F568M Is An ASTM International Standard For Metric Bolts, Screws and Studs That Are Used in GeneralRahul SinghNo ratings yet
- Fuel Filter - Fuel Pump PDFDocument2 pagesFuel Filter - Fuel Pump PDFArildo Chaves de AndradeNo ratings yet
- CBH-23-481 Din 315 Wing Nut M6 8 WZP 4Document2 pagesCBH-23-481 Din 315 Wing Nut M6 8 WZP 4qualityNo ratings yet
- 9802/6220 B1-8-1 Bonnet & SidepanelsDocument2 pages9802/6220 B1-8-1 Bonnet & SidepanelsGarcia CruzNo ratings yet
- Self Tapping Screw StandardsDocument4 pagesSelf Tapping Screw StandardsVino KumarNo ratings yet
- Self Tapping Screw 6336Document2 pagesSelf Tapping Screw 6336Dinesh GanapathyNo ratings yet
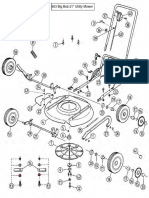
- Big-Bob Supaswift Mower PartsDocument2 pagesBig-Bob Supaswift Mower PartsgraemetekNo ratings yet
- Bydf3 ElectricDocument61 pagesBydf3 ElectricIvan AvilaNo ratings yet
- Countersunk Screw With Hexagon Socket Head ISO 10642 Steel 10.9Document10 pagesCountersunk Screw With Hexagon Socket Head ISO 10642 Steel 10.9Alex DeschevogNo ratings yet
- Catalogo Bimecc 2014Document56 pagesCatalogo Bimecc 2014marcoscalasNo ratings yet
- Stok SD 19 April 2021Document27 pagesStok SD 19 April 2021TriNo ratings yet
- Kls Inv1Document5 pagesKls Inv1alexmtzgNo ratings yet