You might also like
- 966 F Loader444 PDFDocument14 pages966 F Loader444 PDFmarsh2002No ratings yet
- Bored Pile Procedure Rev 2Document5 pagesBored Pile Procedure Rev 2Germar Porquerino100% (1)
- FSM SlidesDocument37 pagesFSM SlidesSahil Sharma0% (1)
- I Ma 3010.71 1320 622 Huy 067 - A - ComDocument140 pagesI Ma 3010.71 1320 622 Huy 067 - A - ComValério de Oliveira Santos100% (1)
- Microscope Lab Estimating Size and Calculating MagnificationDocument9 pagesMicroscope Lab Estimating Size and Calculating MagnificationvedreagNo ratings yet
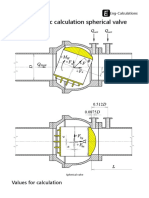
- Hydrodynamic Calculation Spherical ValveDocument34 pagesHydrodynamic Calculation Spherical ValveEng-CalculationsNo ratings yet
- Assignment On PLCDocument4 pagesAssignment On PLCNirman ParasharNo ratings yet
- Abb Unitrol-1020 Exciter: Start Up GuideDocument8 pagesAbb Unitrol-1020 Exciter: Start Up GuideIppi0% (1)
- Mealy and Moore Type Finite State MachinesDocument9 pagesMealy and Moore Type Finite State MachinesNithyendra RoyNo ratings yet
- Hardware Tutorial 05Document2 pagesHardware Tutorial 05Taqi ShahNo ratings yet
- PLC and Control System and AnalysisDocument10 pagesPLC and Control System and AnalysisM.AllaritNo ratings yet
- Moore and MealyDocument39 pagesMoore and MealyVivek TgNo ratings yet
- Finite State Machine LessonDocument42 pagesFinite State Machine LessonNightkiller StationNo ratings yet
- Experiment 12: Aim: - Important Concepts/TheoryDocument8 pagesExperiment 12: Aim: - Important Concepts/TheoryudayNo ratings yet
- EE15-1705 E6 Industrial Automation Module 3Document14 pagesEE15-1705 E6 Industrial Automation Module 3Stark SammuelNo ratings yet
- CEN214 Chapter5 P3 Modified PDFDocument60 pagesCEN214 Chapter5 P3 Modified PDFAboNawaFNo ratings yet
- Introduction State MachineDocument51 pagesIntroduction State MachineAnkit SinghNo ratings yet
- TL TN DKLG - PLC - Rev20221127Document31 pagesTL TN DKLG - PLC - Rev20221127Nguyễn Quốc ToànNo ratings yet
- LabVIEW HandoutDocument52 pagesLabVIEW HandoutYatheesh KaggereNo ratings yet
- Slidig Mode in Buck PDFDocument6 pagesSlidig Mode in Buck PDFAmar SajiNo ratings yet
- Present A Completed Control SystemDocument12 pagesPresent A Completed Control SystemTrườngg ThịnhhNo ratings yet
- 1-State Diagram Problems With SolutionsDocument19 pages1-State Diagram Problems With SolutionsLuc AusterNo ratings yet
- Lab Session # 9 Finite State Machines (FSMS) : W), and Produces A Set of Outputs (Z)Document7 pagesLab Session # 9 Finite State Machines (FSMS) : W), and Produces A Set of Outputs (Z)Ahmad M. HammadNo ratings yet
- IEOM17-Comparative study of sliding surfaces for double boost converter controlDocument11 pagesIEOM17-Comparative study of sliding surfaces for double boost converter controlwigaYeHtetNo ratings yet
- Sliding Mode Controller Design For Controlling The Speed of A DC MotorDocument5 pagesSliding Mode Controller Design For Controlling The Speed of A DC Motorbokic88No ratings yet
- Simulink Toy Car SimulationDocument6 pagesSimulink Toy Car SimulationartikscindianNo ratings yet
- Capstone ResearchProject Moore Mealy MachineDocument9 pagesCapstone ResearchProject Moore Mealy MachineAnish ChatterjeeNo ratings yet
- IIyr IVsem Controlsystem WWW Matterhere Com NRRDocument28 pagesIIyr IVsem Controlsystem WWW Matterhere Com NRRShubham GahlawatNo ratings yet
- Event Driven State MachinesDocument5 pagesEvent Driven State Machinesyewie561No ratings yet
- Clocked Synchronous State MachinesDocument2 pagesClocked Synchronous State MachinesMahesh AbnaveNo ratings yet
- A Double Input DC/DC Converter For Photovoltaic/Wind SystemsDocument5 pagesA Double Input DC/DC Converter For Photovoltaic/Wind SystemswidepermitNo ratings yet
- T36 CountersDocument17 pagesT36 Countersmanish 123No ratings yet
- Design of Finite State Machine Using VHDLDocument4 pagesDesign of Finite State Machine Using VHDLPokhrel TutsNo ratings yet
- Kuliah 10 Automation CIM Groover 4th Edition KuliahDocument25 pagesKuliah 10 Automation CIM Groover 4th Edition KuliahEKONo ratings yet
- Opnet Basic ProcessesDocument21 pagesOpnet Basic ProcessescunninghNo ratings yet
- Problemas MecanicaDocument8 pagesProblemas MecanicaFabian Andres Blanco GNo ratings yet
- Basic Automation 2020Document5 pagesBasic Automation 2020Biodence NasaliNo ratings yet
- Lecture 18: Designing A Central Processor Unit 2: The ControllerDocument8 pagesLecture 18: Designing A Central Processor Unit 2: The ControllerTaqi ShahNo ratings yet
- Furuta 1992Document6 pagesFuruta 1992LÊ ĐẠI HIỆPNo ratings yet
- 2.1 Conditional Logic: Ladder ProgrammingDocument10 pages2.1 Conditional Logic: Ladder ProgrammingLuka NikitovicNo ratings yet
- Economical Filter Valve Installation, Use and Maintenance ManualDocument13 pagesEconomical Filter Valve Installation, Use and Maintenance Manualhasanolan583No ratings yet
- CPU Controller Design and State Sequencing LogicDocument8 pagesCPU Controller Design and State Sequencing LogicrinobiNo ratings yet
- 8D100 03 PDFDocument12 pages8D100 03 PDFChristian BedoyaNo ratings yet
- Etr345 Junghenrich TranspalletDocument13 pagesEtr345 Junghenrich TranspalletLuis ArcudiaNo ratings yet
- Lecture 11Document21 pagesLecture 11fotescuiondaniel7No ratings yet
- VHDL FSM UNIT 5 ET&T 7th SemDocument22 pagesVHDL FSM UNIT 5 ET&T 7th SemDEEPA KUNWARNo ratings yet
- InTech-Sliding Mode Control and Fuzzy Sliding Mode Control For DC DC ConvertersDocument22 pagesInTech-Sliding Mode Control and Fuzzy Sliding Mode Control For DC DC ConvertersWalid AbidNo ratings yet
- Ece550 Hw4 AGC f4Document2 pagesEce550 Hw4 AGC f4Swaroop MohapatraNo ratings yet
- Moore and Mealy Machines: A Comparison of Finite State MachinesDocument21 pagesMoore and Mealy Machines: A Comparison of Finite State MachinesWahaj MoizNo ratings yet
- LQG - LTR Controller Design Quanser Rotary Inverted PendulumDocument6 pagesLQG - LTR Controller Design Quanser Rotary Inverted PendulumGeovani BondoNo ratings yet
- Neural network controls DC-DC converterDocument12 pagesNeural network controls DC-DC converterRumana AliNo ratings yet
- High Performance DCDC Buck Converter Using SlidingDocument9 pagesHigh Performance DCDC Buck Converter Using SlidingArivalakan Joyal2002No ratings yet
- Inno2024 Emt4203 Control II Notes r1Document15 pagesInno2024 Emt4203 Control II Notes r1kabuej3No ratings yet
- Lumayaga Homework3Document9 pagesLumayaga Homework3Satoshi EugarnNo ratings yet
- FSM DesignDocument61 pagesFSM DesignParesh SawantNo ratings yet
- Moore Mealy MachineDocument5 pagesMoore Mealy MachineVANNAM ABHINAVSAINo ratings yet
- Inno2024 Emt4203 Control II Notes r2Document35 pagesInno2024 Emt4203 Control II Notes r2kabuej3No ratings yet
- Basic Processes OverviewDocument51 pagesBasic Processes OverviewAmina KraljusicNo ratings yet
- Research Article: Fuzzy Second-Order Sliding Mode Control Design For A Two-Cell DC-DC ConverterDocument9 pagesResearch Article: Fuzzy Second-Order Sliding Mode Control Design For A Two-Cell DC-DC ConvertersathishNo ratings yet
- Electrical Correcting Elements in Automatic Control and Regulation CircuitsFrom EverandElectrical Correcting Elements in Automatic Control and Regulation CircuitsNo ratings yet
- EvaporationDocument28 pagesEvaporationabishekmosesNo ratings yet
- Quantitative Methods For Business 12Th Edition Anderson Solutions Manual Full Chapter PDFDocument65 pagesQuantitative Methods For Business 12Th Edition Anderson Solutions Manual Full Chapter PDFvernier.decyliclnn4100% (8)
- Class 5 HCF and LCMDocument49 pagesClass 5 HCF and LCMChitra AmruNo ratings yet
- You Can Create An SFAS Matrix by Following These StepsDocument4 pagesYou Can Create An SFAS Matrix by Following These StepspassantNo ratings yet
- Excel CalculusDocument412 pagesExcel Calculusras82362No ratings yet
- Introducing Decision Transformers On Hugging Face ?Document12 pagesIntroducing Decision Transformers On Hugging Face ?minfuelNo ratings yet
- BCA 4th Sem. Asst. 2018-19Document15 pagesBCA 4th Sem. Asst. 2018-19Kumar InfoNo ratings yet
- Science 8: Tanauan School of Arts and TradeDocument5 pagesScience 8: Tanauan School of Arts and TradeAlven ReyNo ratings yet
- T KIM 1502671 BibliographyDocument14 pagesT KIM 1502671 BibliographyAruf Rofi ZainiNo ratings yet
- Euclidean and Non Euclidean Geometries Development and History PDFDocument2 pagesEuclidean and Non Euclidean Geometries Development and History PDFMelissaNo ratings yet
- Improving The High-Performance Inductively Coupled Plasma Optical Emission Spectrometry Methodology Through Exact MatchingDocument9 pagesImproving The High-Performance Inductively Coupled Plasma Optical Emission Spectrometry Methodology Through Exact MatchingLeonardo JaimesNo ratings yet
- Predict bank marketing success with new dataDocument2 pagesPredict bank marketing success with new dataMadhu EvuriNo ratings yet
- Mathematical Studies Paper 2 SisnsuDocument11 pagesMathematical Studies Paper 2 SisnsuLucianaNo ratings yet
- Quezon Naguilian, IsabelaDocument2 pagesQuezon Naguilian, IsabelaYvette Marie Yaneza NicolasNo ratings yet
- Chapter 6Document12 pagesChapter 6Meseret YAlewNo ratings yet
- BE Semester-III (Instrumentation & Control) Question Bank (Digital Techniques) All Questions Carry Equal Marks (10 Marks)Document2 pagesBE Semester-III (Instrumentation & Control) Question Bank (Digital Techniques) All Questions Carry Equal Marks (10 Marks)abhishek pandaNo ratings yet
- Flexural Retrofitting With SIMCONDocument21 pagesFlexural Retrofitting With SIMCONSuppayarn DechpormsukNo ratings yet
- Marikina Polytechnic College Discrete Math Table of SpecificationDocument1 pageMarikina Polytechnic College Discrete Math Table of Specificationangelic rivera50% (2)
- GECMAT Assignment 3Document9 pagesGECMAT Assignment 3Rheysalyn Mae DespiNo ratings yet
- 03a.magnetism (171 - 201)Document31 pages03a.magnetism (171 - 201)Mupli RajeshNo ratings yet
- Java Operators: Data TypesDocument15 pagesJava Operators: Data TypesYe Yint AungNo ratings yet
- I-Day 35Document3 pagesI-Day 35Rainman InsanityNo ratings yet
- Comcot Manual V 17 PDFDocument65 pagesComcot Manual V 17 PDFmerdeka48No ratings yet
- Cracku RRB NTPC Syllogism Questions PDFDocument32 pagesCracku RRB NTPC Syllogism Questions PDFshishirNo ratings yet
- Outline of DegreeDocument277 pagesOutline of Degreewarda irfanNo ratings yet
- Camm 4e Ch12 PPTDocument99 pagesCamm 4e Ch12 PPTMardonio AgustinNo ratings yet
- Finding The Formula For The NTH TermDocument4 pagesFinding The Formula For The NTH TermRedMoonLightNo ratings yet