You might also like
- Predictive Maintenance in Intelligent-Control-Maintenance-Management System For Hydroelectric Generating UnitDocument8 pagesPredictive Maintenance in Intelligent-Control-Maintenance-Management System For Hydroelectric Generating UnitGabrielWalersonNo ratings yet
- Application of Reliability-Centered Stochastic Approach and FMECA To Conditional Maintenance Electric Power Plants in ChinaDocument5 pagesApplication of Reliability-Centered Stochastic Approach and FMECA To Conditional Maintenance Electric Power Plants in Chinaapi-3697505No ratings yet
- Optimizing Maintenance Policies For A Yaw System Using Reliability-Centered Maintenance and Data-Driven Condition MonitoringDocument9 pagesOptimizing Maintenance Policies For A Yaw System Using Reliability-Centered Maintenance and Data-Driven Condition MonitoringclarkyeahNo ratings yet
- Analysis of The Condition Based Monitoring System For Heavy Industrial MachineriesDocument4 pagesAnalysis of The Condition Based Monitoring System For Heavy Industrial MachineriessebastianNo ratings yet
- 09 GangNiu FrameworkforCostEffectiveandAccurateMaintenance IEEEDocument8 pages09 GangNiu FrameworkforCostEffectiveandAccurateMaintenance IEEElixoshadyNo ratings yet
- FMECA Analysis and Condition Monitoring of Critical Equipments in Super Thermal Power PlantDocument17 pagesFMECA Analysis and Condition Monitoring of Critical Equipments in Super Thermal Power PlantSasithorn KhamputNo ratings yet
- Mmscience - 2015 12 - Machine Tool Health and Usage Monitoring System An Intitial Analyses PDFDocument5 pagesMmscience - 2015 12 - Machine Tool Health and Usage Monitoring System An Intitial Analyses PDFOscarNo ratings yet
- Expert Systems With Applications: Van Tung Tran, Bo-Suk YangDocument12 pagesExpert Systems With Applications: Van Tung Tran, Bo-Suk Yangcgarciag3250No ratings yet
- Artiiculo 13Document16 pagesArtiiculo 13Efrain Parra QuispeNo ratings yet
- Advances in Integrated Vehicle Health Monitoring S PDFDocument6 pagesAdvances in Integrated Vehicle Health Monitoring S PDFAdrian LojanoNo ratings yet
- A Framework of Medical Equipment Management System For In-House Clinical Engineering DepartmentDocument4 pagesA Framework of Medical Equipment Management System For In-House Clinical Engineering DepartmentHà Thu BùiNo ratings yet
- Vibration Rotating EquipmentDocument17 pagesVibration Rotating EquipmentNiwrad EtagramNo ratings yet
- Vibrational Diagnostics of Rotating MachineryDocument31 pagesVibrational Diagnostics of Rotating Machineryhuliplay100% (1)
- A Survey of Predictive Maintenance: Systems, Purposes and ApproachesDocument38 pagesA Survey of Predictive Maintenance: Systems, Purposes and ApproachesAmna MajidNo ratings yet
- Motor Fault Diagnostics Based On Current Signatures A ReviewDocument19 pagesMotor Fault Diagnostics Based On Current Signatures A ReviewBadre BellaliNo ratings yet
- Compressor Health Monitoring Using IotDocument8 pagesCompressor Health Monitoring Using IotTJPRC PublicationsNo ratings yet
- CBM & RCM Applied On Nuclear Power PlantsDocument11 pagesCBM & RCM Applied On Nuclear Power PlantsGeert Henk WijnantsNo ratings yet
- State-of-the-Art Predictive Maintenance TechniquesDocument13 pagesState-of-the-Art Predictive Maintenance TechniquesKleber VieiraNo ratings yet
- A Hybrid Predictive Maintenance Approach For CNC Machine Tool Driven byDocument16 pagesA Hybrid Predictive Maintenance Approach For CNC Machine Tool Driven bySheron SisodiyaNo ratings yet
- 1-S2.0-S0951832023000820-Main-Progrma Mantto CondicDocument11 pages1-S2.0-S0951832023000820-Main-Progrma Mantto CondicJulio Cesar Diaz CaroNo ratings yet
- Statistic-Based Method To Monitor Belt Transmission Looseness Through Motor Phase CurrentsDocument9 pagesStatistic-Based Method To Monitor Belt Transmission Looseness Through Motor Phase CurrentsJOEL EZEQUIEL PACHECO MENANo ratings yet
- Vibration Analysis of Siemens v94 Gas TurbineDocument10 pagesVibration Analysis of Siemens v94 Gas TurbinepholippNo ratings yet
- Iot-Based Prognostics and Systems Health Management For Industrial ApplicationsDocument12 pagesIot-Based Prognostics and Systems Health Management For Industrial ApplicationsChinmayJoshiNo ratings yet
- Bearing Fault Classification of InductioDocument21 pagesBearing Fault Classification of InductioAmag2011No ratings yet
- A Review of Condition Monitoring of Motors-May 2017Document45 pagesA Review of Condition Monitoring of Motors-May 2017irfanNo ratings yet
- Techniques and Indices For Preventive Maintenance OptimizationDocument6 pagesTechniques and Indices For Preventive Maintenance OptimizationGopi SubramaniamNo ratings yet
- RTU Maintenence StrategyDocument15 pagesRTU Maintenence StrategyKara ButlerNo ratings yet
- Vibration Signal Diagnosis and Analysis of Rotating Machine by Utilizing Cloud ComputingDocument10 pagesVibration Signal Diagnosis and Analysis of Rotating Machine by Utilizing Cloud ComputingDrRajeev ChauhanNo ratings yet
- An Intelligent Machine Condition Monitoring System UsingDocument13 pagesAn Intelligent Machine Condition Monitoring System UsingIván VillamizarNo ratings yet
- 887-Predictive Maintenance - What Is It - (Types, Comparison, & Benefits)Document7 pages887-Predictive Maintenance - What Is It - (Types, Comparison, & Benefits)suritataNo ratings yet
- An Application of Ultrasound Technology in Condition Monitoring-Rev.1-WebDocument16 pagesAn Application of Ultrasound Technology in Condition Monitoring-Rev.1-WebChristopher BrownNo ratings yet
- Machine Learning Approach For Predictive Maintenance in Industry 4.0Document6 pagesMachine Learning Approach For Predictive Maintenance in Industry 4.0Prince SharmaNo ratings yet
- Statistical Condition Monitoring Based On Vibration SignalDocument10 pagesStatistical Condition Monitoring Based On Vibration Signalbrettharvey555No ratings yet
- Reliability Centered Maintenance Used in Metro Railways: February 2020Document10 pagesReliability Centered Maintenance Used in Metro Railways: February 2020skiu paket 31No ratings yet
- Case 6 ReliabilityCenteredMaintenanceUsedinMetroRailways PDFDocument10 pagesCase 6 ReliabilityCenteredMaintenanceUsedinMetroRailways PDFskiu paket 31No ratings yet
- Ojsadmin,+jarte 1-1 13740Document11 pagesOjsadmin,+jarte 1-1 13740HugoNo ratings yet
- UML Model For Integration Between RCM and CBM in An E-Maintenance ArchitectureDocument6 pagesUML Model For Integration Between RCM and CBM in An E-Maintenance ArchitectureLong NguyenNo ratings yet
- Chatterjee2021 - Scientometric Review of Artificial Intelligence For OperationsDocument31 pagesChatterjee2021 - Scientometric Review of Artificial Intelligence For Operations蔡杰No ratings yet
- Condition Monitoring, Fault Diagnosis and PredictiveDocument8 pagesCondition Monitoring, Fault Diagnosis and PredictiveChaitanya AbhishekNo ratings yet
- LSTM 8Document9 pagesLSTM 8Raj PatilNo ratings yet
- Investigation On Monitoring System For Pantograph and Catenary Based On Condition-Based Recognition of PantographDocument11 pagesInvestigation On Monitoring System For Pantograph and Catenary Based On Condition-Based Recognition of PantographJabezNo ratings yet
- Overhead Line Preventive Maintenance Strategy Based On Condition Monitoring and System Reliability AssessmentDocument8 pagesOverhead Line Preventive Maintenance Strategy Based On Condition Monitoring and System Reliability AssessmentRylai CrestfallNo ratings yet
- Predictive Maintenance Management Using Sensor-Based Degradation ModelsDocument10 pagesPredictive Maintenance Management Using Sensor-Based Degradation ModelsyassinebouazziNo ratings yet
- Condition Monitoring Systemsin Power Plantsto Determinethe Typeof Maintenance Using Multiple Typesof SensorsDocument9 pagesCondition Monitoring Systemsin Power Plantsto Determinethe Typeof Maintenance Using Multiple Typesof Sensorsandika surya hadiwinataNo ratings yet
- 1 s2.0 S2212827118312344 MainDocument6 pages1 s2.0 S2212827118312344 MainRajeevNo ratings yet
- Applying Reliability Centered Maintenance RCM To Sampling Subsystem in Continuous Emission Monitoring SystemDocument9 pagesApplying Reliability Centered Maintenance RCM To Sampling Subsystem in Continuous Emission Monitoring SystemteguhNo ratings yet
- Soualhi 23769 2Document16 pagesSoualhi 23769 2Max PainNo ratings yet
- 387 394 Ein 23 2Document8 pages387 394 Ein 23 2tomo tomoNo ratings yet
- Intelligent Bearing Fault Monitoring System Using Support Vector Machine and Wavelet Packet Decomposition For Induction MotorsDocument5 pagesIntelligent Bearing Fault Monitoring System Using Support Vector Machine and Wavelet Packet Decomposition For Induction MotorsSaad ChakkorNo ratings yet
- 368 1425 1 PBDocument9 pages368 1425 1 PBKassahun AwokeNo ratings yet
- Development of A Diagnostic Tool For Condition Monitoring of Rotating MachineryDocument10 pagesDevelopment of A Diagnostic Tool For Condition Monitoring of Rotating Machinerypeter.phamNo ratings yet
- A Model Based RCM Analysis MethodDocument7 pagesA Model Based RCM Analysis MethodMiguel Angel Ccapa RojasNo ratings yet
- Simulation of Substation Integrated MonitoringDocument5 pagesSimulation of Substation Integrated MonitoringCV Karawiyin BogorNo ratings yet
- Fault Classification in Three-Phase Motors Based On Vibration Signal Analysis and Artificial Neural NetworksDocument19 pagesFault Classification in Three-Phase Motors Based On Vibration Signal Analysis and Artificial Neural NetworksEd snowdenNo ratings yet
- 15HE38E-Condition Monitoring of High Votage Power Apparatus Unit I - IndroductionDocument3 pages15HE38E-Condition Monitoring of High Votage Power Apparatus Unit I - IndroductionjananiNo ratings yet
- 069-En Monitoring Mobile06Document7 pages069-En Monitoring Mobile06xxshNo ratings yet
- MEMS Multisensor Intelligent Damage Detection For Wind TurbinesDocument8 pagesMEMS Multisensor Intelligent Damage Detection For Wind TurbinesMahesh kumarNo ratings yet
- Automated Machine Tool Prognostics For Turning Operation Using Acoustic Emission and Learning Vector QuantizationDocument5 pagesAutomated Machine Tool Prognostics For Turning Operation Using Acoustic Emission and Learning Vector QuantizationMuhammad FahadNo ratings yet
- Mechanical Vibrations and Condition MonitoringFrom EverandMechanical Vibrations and Condition MonitoringRating: 5 out of 5 stars5/5 (1)
- TL Tickets Trains T8D753DB7C2AE013802AEB300Document3 pagesTL Tickets Trains T8D753DB7C2AE013802AEB300NatarajNo ratings yet
- 429247630-Energy-Audit-Questions-Paper-for-BEE-43Document1 page429247630-Energy-Audit-Questions-Paper-for-BEE-43NatarajNo ratings yet
- 429247630-Energy-Audit-Questions-Paper-for-BEE-38Document1 page429247630-Energy-Audit-Questions-Paper-for-BEE-38NatarajNo ratings yet
- 429247630-Energy-Audit-Questions-Paper-for-BEE-46Document1 page429247630-Energy-Audit-Questions-Paper-for-BEE-46NatarajNo ratings yet
- 429247630-Energy-Audit-Questions-Paper-for-BEE-39Document1 page429247630-Energy-Audit-Questions-Paper-for-BEE-39NatarajNo ratings yet
- 429247630-Energy-Audit-Questions-Paper-for-BEE-41Document1 page429247630-Energy-Audit-Questions-Paper-for-BEE-41NatarajNo ratings yet
- 429247630-Energy-Audit-Questions-Paper-for-BEE-47Document1 page429247630-Energy-Audit-Questions-Paper-for-BEE-47NatarajNo ratings yet
- 429247630-Energy-Audit-Questions-Paper-for-BEE-42Document1 page429247630-Energy-Audit-Questions-Paper-for-BEE-42NatarajNo ratings yet
- 429247630-Energy-Audit-Questions-Paper-for-BEE-48Document1 page429247630-Energy-Audit-Questions-Paper-for-BEE-48NatarajNo ratings yet
- 429247630-Energy-Audit-Questions-Paper-for-BEE-16Document1 page429247630-Energy-Audit-Questions-Paper-for-BEE-16NatarajNo ratings yet
- P2S2 - Solved-1-11-11Document1 pageP2S2 - Solved-1-11-11NatarajNo ratings yet
- 429247630-Energy-Audit-Questions-Paper-for-BEE-40Document1 page429247630-Energy-Audit-Questions-Paper-for-BEE-40NatarajNo ratings yet
- 429247630-Energy-Audit-Questions-Paper-for-BEE-9Document1 page429247630-Energy-Audit-Questions-Paper-for-BEE-9NatarajNo ratings yet
- 429247630-Energy-Audit-Questions-Paper-for-BEE-45Document1 page429247630-Energy-Audit-Questions-Paper-for-BEE-45NatarajNo ratings yet
- TL Tickets Trains T8D75397115AE013802AEFA00Document3 pagesTL Tickets Trains T8D75397115AE013802AEFA00NatarajNo ratings yet
- TL Tickets Trains T8B1E02AB0FAE013802AEA300Document3 pagesTL Tickets Trains T8B1E02AB0FAE013802AEA300NatarajNo ratings yet
- P2S2 - Solved-1-11-8Document1 pageP2S2 - Solved-1-11-8NatarajNo ratings yet
- SchemeDocument113 pagesSchemeNatarajNo ratings yet
- LSHS Fuel PropertiesDocument1 pageLSHS Fuel PropertiesNatarajNo ratings yet
- Flue Gas Properties TableDocument5 pagesFlue Gas Properties TableNatarajNo ratings yet
- Analyis: &tgans Mitha AaurDocument6 pagesAnalyis: &tgans Mitha AaurNatarajNo ratings yet
- CV NatarajDocument15 pagesCV NatarajNatarajNo ratings yet
- Personal Information: EducationDocument2 pagesPersonal Information: EducationNatarajNo ratings yet
- AHU Heat Gain Due To Supply Fan Motor - HVAC - R Engineering - Eng-TipsDocument8 pagesAHU Heat Gain Due To Supply Fan Motor - HVAC - R Engineering - Eng-TipsNatarajNo ratings yet
- Online Process Even Sem2021Document1 pageOnline Process Even Sem2021NatarajNo ratings yet
- Parameter Estimation For Electric Motor Condition MonitoringDocument12 pagesParameter Estimation For Electric Motor Condition MonitoringNatarajNo ratings yet
- Power-Linker Course Centre: National Training CoursesDocument20 pagesPower-Linker Course Centre: National Training CoursesAnilNo ratings yet
- Four-Position Sectionalizing Loadbreak SwitchesDocument8 pagesFour-Position Sectionalizing Loadbreak SwitchesGustavo PérezNo ratings yet
- Reyrolle 7SR10 Platform: Protecting Grid With ConfidenceDocument5 pagesReyrolle 7SR10 Platform: Protecting Grid With ConfidenceGabriel NaspiranNo ratings yet
- Instructions: UV Flame Detector Series X2200, X2200G, and X2200MDocument33 pagesInstructions: UV Flame Detector Series X2200, X2200G, and X2200MleunamsayanNo ratings yet
- 05.Pdf GRT200Document62 pages05.Pdf GRT200tuantz206No ratings yet
- Transient Recovery Voltage Requirements Associated With The Application of Current-Limiting Series ReactorsDocument6 pagesTransient Recovery Voltage Requirements Associated With The Application of Current-Limiting Series ReactorsDante FilhoNo ratings yet
- Faults Between AC and DC LinesDocument53 pagesFaults Between AC and DC LinesNaveed RabbaniNo ratings yet
- Datasheet Easergy MiCOM P14x - P143 - E-N - JDocument2 pagesDatasheet Easergy MiCOM P14x - P143 - E-N - Jvideo irfanNo ratings yet
- SIPROTEC 7SJ81 - ProfileDocument2 pagesSIPROTEC 7SJ81 - ProfilekashifNo ratings yet
- FAULT CODE 187 (ISB/QSB Automotive and Industrial, ISC/QSC/ISL/QSL Automotive, Industrial, and Marine) Sensor Supply Voltage Number 2 Circuit - Voltage Below Normal, or Shorted To Low SourceDocument11 pagesFAULT CODE 187 (ISB/QSB Automotive and Industrial, ISC/QSC/ISL/QSL Automotive, Industrial, and Marine) Sensor Supply Voltage Number 2 Circuit - Voltage Below Normal, or Shorted To Low SourceAhmedmahNo ratings yet
- Worthington Instruction Book PCI07 enDocument28 pagesWorthington Instruction Book PCI07 ensebastian100% (8)
- Carbolite Gero Ovens User ManualDocument16 pagesCarbolite Gero Ovens User Manualgeetha raniNo ratings yet
- Diffentian Transformer ProtectionDocument227 pagesDiffentian Transformer ProtectionHuget St100% (3)
- Company Directive: Standard Technique: Tp21D/3 11kV, 6.6kV and LV EarthingDocument90 pagesCompany Directive: Standard Technique: Tp21D/3 11kV, 6.6kV and LV EarthingAnonymous YWDRaCkSNo ratings yet
- Electrical Workshop - ExperimentsDocument7 pagesElectrical Workshop - ExperimentsMirza Bilal100% (1)
- Switchgear+presentation - Arc - AFLR StandardsDocument53 pagesSwitchgear+presentation - Arc - AFLR Standardsbubo28No ratings yet
- C604 VVVFDocument39 pagesC604 VVVFWander Gomes100% (2)
- The How's and Why's of Isolated GroundingDocument14 pagesThe How's and Why's of Isolated GroundingAlejandro JimenezNo ratings yet
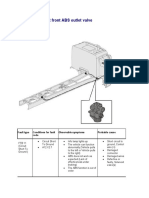
- ABS-C0015, Right Front ABS Outlet ValveDocument2 pagesABS-C0015, Right Front ABS Outlet ValveBùi Xuân ĐứcNo ratings yet
- 3.5100334-01 - Salwico Cargo Addressable - Service & Maintenance Manual - M - EN - 2013 - GDocument76 pages3.5100334-01 - Salwico Cargo Addressable - Service & Maintenance Manual - M - EN - 2013 - GSerhiiNo ratings yet
- Protection FundamentalsDocument84 pagesProtection Fundamentalsعزو عبدالكريم100% (1)
- Restricted Earth Fault Protection in Low-Impedance Grounded Systems With Inverter-Based ResourcesDocument8 pagesRestricted Earth Fault Protection in Low-Impedance Grounded Systems With Inverter-Based Resourceskarim_ouakliNo ratings yet
- Relay Setting Calculation LatestDocument23 pagesRelay Setting Calculation Latestমোঃ মহসিনNo ratings yet
- Electrical Safety Device - Air Circuit Breaker (ACB) PDFDocument3 pagesElectrical Safety Device - Air Circuit Breaker (ACB) PDFKye AdrianoNo ratings yet
- Guardplc Certified Function Blocks - Basic Suite: Catalog Number 1753-CfbbasicDocument110 pagesGuardplc Certified Function Blocks - Basic Suite: Catalog Number 1753-CfbbasicTarun BharadwajNo ratings yet
- 11 Webinar Directional Overcurrent RelayingDocument47 pages11 Webinar Directional Overcurrent Relayingfrodo frodo100% (1)
- Transient Motor Reacceleration Study in An Integrated Petrochemical FacilityDocument10 pagesTransient Motor Reacceleration Study in An Integrated Petrochemical FacilityIonut CristiNo ratings yet
- Circuit Breakers MCQsDocument42 pagesCircuit Breakers MCQsshukla dhaval100% (1)
- SEE1401 (2) Power SystemDocument79 pagesSEE1401 (2) Power SystemAashish YadavNo ratings yet
- Installation Manual and Operating Instructions TI250 - Series Static Electrical Power InverterDocument15 pagesInstallation Manual and Operating Instructions TI250 - Series Static Electrical Power InverterenticoNo ratings yet