You might also like
- Low-Power Digital Filtering Using Approximate ProcessingDocument7 pagesLow-Power Digital Filtering Using Approximate Processingggwpsontung139No ratings yet
- To To (3) .: ThomasDocument4 pagesTo To (3) .: ThomasSAJAN P PHILIP BITNo ratings yet
- Review On Word Length Optimization: Pandi G Sabareeswari, Bhuvaneswari S DR Manivannan SDocument4 pagesReview On Word Length Optimization: Pandi G Sabareeswari, Bhuvaneswari S DR Manivannan Sbhuvana_eeeNo ratings yet
- IEEE_Paper_TemplateDocument6 pagesIEEE_Paper_TemplatealamrojoudNo ratings yet
- A 0.6-V 10-Bit 200-kS/s Fully Differential SAR ADC With Incremental Converting Algorithm For Energy Efficient ApplicationsDocument10 pagesA 0.6-V 10-Bit 200-kS/s Fully Differential SAR ADC With Incremental Converting Algorithm For Energy Efficient ApplicationsSilpa VelagaletiNo ratings yet
- A Low Power Asynchronous VLSI FIR FilterDocument11 pagesA Low Power Asynchronous VLSI FIR FilterducvillaNo ratings yet
- Navid Lashkarian, Signal Processing Division, Xilinx Inc., San Jose, USA, Chris Dick, Signal Processing Division, Xilinx Inc., San Jose, USADocument6 pagesNavid Lashkarian, Signal Processing Division, Xilinx Inc., San Jose, USA, Chris Dick, Signal Processing Division, Xilinx Inc., San Jose, USASyed M. YaseenNo ratings yet
- A Nonuniform Sampling ADC Architecture With Reconfigurable Digital Anti-Aliasing FilterDocument13 pagesA Nonuniform Sampling ADC Architecture With Reconfigurable Digital Anti-Aliasing FilterXIn XianNo ratings yet
- Fir ApcDocument14 pagesFir Apcns saravananNo ratings yet
- Implementation of Reconfigurable Adaptive Filtering AlgorithmsDocument5 pagesImplementation of Reconfigurable Adaptive Filtering AlgorithmsChaitanyaNo ratings yet
- Digital Communications and Networks: Martin Damrath, Peter Adam Hoeher, Gilbert J.M. ForkelDocument8 pagesDigital Communications and Networks: Martin Damrath, Peter Adam Hoeher, Gilbert J.M. ForkelrolingNo ratings yet
- New low-complexity reconfigurable architectures for FIR filtersDocument14 pagesNew low-complexity reconfigurable architectures for FIR filtersSyfunnisa ShaikNo ratings yet
- High-Performance 8-Bit Modulator Used For Sigma-Delta Analog To Digital ConverterDocument7 pagesHigh-Performance 8-Bit Modulator Used For Sigma-Delta Analog To Digital ConverterAmeya DeshpandeNo ratings yet
- Signal Processing: Lap-Luat Nguyen, Roland Gautier, Anthony Fiche, Gilles Burel, Emanuel RadoiDocument19 pagesSignal Processing: Lap-Luat Nguyen, Roland Gautier, Anthony Fiche, Gilles Burel, Emanuel RadoiRidouane OulhiqNo ratings yet
- What Is Adaptive Signal ProcessingDocument16 pagesWhat Is Adaptive Signal Processingderresesolomon36No ratings yet
- LP MainDocument10 pagesLP MainAnonymous A6i1RJNo ratings yet
- Split Wiener Filtering With Application in Adaptive SystemsDocument9 pagesSplit Wiener Filtering With Application in Adaptive SystemsAYUSH KUMAR CHOWDHURYNo ratings yet
- Wireless Sensor Network of 3 - Bit ADCDocument6 pagesWireless Sensor Network of 3 - Bit ADCAnonymous izrFWiQNo ratings yet
- Optimization and Implementation of The Wavelet Based Algorithms For Embedded Biomedical Signal ProcessingDocument21 pagesOptimization and Implementation of The Wavelet Based Algorithms For Embedded Biomedical Signal ProcessingMalu MohanNo ratings yet
- International Journal of Engineering Research and Development (IJERD)Document4 pagesInternational Journal of Engineering Research and Development (IJERD)IJERDNo ratings yet
- Cascaded LmsDocument25 pagesCascaded LmsAkilesh MDNo ratings yet
- Adaptive Noise Cancellation Using Multirate Techniques: Prasheel V. Suryawanshi, Kaliprasad Mahapatro, Vardhman J. ShethDocument7 pagesAdaptive Noise Cancellation Using Multirate Techniques: Prasheel V. Suryawanshi, Kaliprasad Mahapatro, Vardhman J. ShethIJERDNo ratings yet
- Adaptive Digital FiltersDocument10 pagesAdaptive Digital Filtersfantastic05No ratings yet
- Application-Specific Low-Power MultipliersDocument6 pagesApplication-Specific Low-Power MultipliersSaiKishoreNo ratings yet
- Joint Clip and Quantization Effects Characterization in OFDM ReceiversDocument8 pagesJoint Clip and Quantization Effects Characterization in OFDM ReceiversBruno BarcellosNo ratings yet
- An Introduction To Digital Filters PDFDocument10 pagesAn Introduction To Digital Filters PDFOtman Chakkor100% (1)
- FPGA Implementation of Adaptive Filter for Impulsive Noise ReductionDocument8 pagesFPGA Implementation of Adaptive Filter for Impulsive Noise ReductionNavathej BangariNo ratings yet
- Devil Al IndivilDocument18 pagesDevil Al IndivilWashington SiguenciaNo ratings yet
- Radio ModulationDocument11 pagesRadio Modulationneerajcet76No ratings yet
- Design and Performance Analysis of A Reconfigurable Fir FilterDocument8 pagesDesign and Performance Analysis of A Reconfigurable Fir FilterKRISHNARAJ RNo ratings yet
- Efficient CIC Decimator Design Using Signed Digit ArithmeticDocument10 pagesEfficient CIC Decimator Design Using Signed Digit ArithmeticEdsonNo ratings yet
- Bayesian and RBF Structures For Re Less Co U Cat Ions Detect IonDocument10 pagesBayesian and RBF Structures For Re Less Co U Cat Ions Detect IonAr FatimzahraNo ratings yet
- Analog-to-Digital Converter Survey and Analysis: Robert H. WaldenDocument12 pagesAnalog-to-Digital Converter Survey and Analysis: Robert H. Waldenedna sisayNo ratings yet
- Approaches To Design & Implement High Speed-Low Power Digital Filter: ReviewDocument15 pagesApproaches To Design & Implement High Speed-Low Power Digital Filter: ReviewOmran RashNo ratings yet
- Hardware Design of Energy-Efficient High-Speed Median FilterDocument5 pagesHardware Design of Energy-Efficient High-Speed Median FiltertresaNo ratings yet
- Research On The Interference Cancellation Based On Adaptive AlgorithmsDocument8 pagesResearch On The Interference Cancellation Based On Adaptive AlgorithmsMykhaylo BilykNo ratings yet
- 2019 TVLSI Energy-Quality Scalable Adders Based On Nonzeroing Bit TruncationDocument5 pages2019 TVLSI Energy-Quality Scalable Adders Based On Nonzeroing Bit TruncationAnamika mishraNo ratings yet
- Power Efficient Optical Transmission For Bandwidth Virtualization in Superchannel SystemsDocument9 pagesPower Efficient Optical Transmission For Bandwidth Virtualization in Superchannel SystemsValery RozentalNo ratings yet
- A Novel Design and Analysis of 4: 2 Compressors With Reduced Area Delay and PowerDocument15 pagesA Novel Design and Analysis of 4: 2 Compressors With Reduced Area Delay and PowerraghavNo ratings yet
- Digital IF Subsampling Using The HI5702, HSP45116 and HSP43220Document5 pagesDigital IF Subsampling Using The HI5702, HSP45116 and HSP43220chocobon_998078No ratings yet
- Review On Frequency SynthesizersDocument7 pagesReview On Frequency SynthesizersAkshaya AndyNo ratings yet
- Practical Introduction To Digital Filter Design - MATLAB ExampleDocument12 pagesPractical Introduction To Digital Filter Design - MATLAB ExampleEdsonNo ratings yet
- AnalysisofapproxaddersDocument6 pagesAnalysisofapproxaddersswetha sillveriNo ratings yet
- Analytical Estimation of Signal Transition Activity From Word-Level StatisticsDocument16 pagesAnalytical Estimation of Signal Transition Activity From Word-Level StatisticsKumar N KrishnaMurthyNo ratings yet
- Variation-Aware Low-Power Synthesis Methodology For Fixed-Point FIR FiltersDocument11 pagesVariation-Aware Low-Power Synthesis Methodology For Fixed-Point FIR FilterskishorechiyaNo ratings yet
- International Journal of Engineering Research and Development (IJERD)Document8 pagesInternational Journal of Engineering Research and Development (IJERD)IJERDNo ratings yet
- A Compact Low-Power Decimation Filter Sigma Delta ModulatorsDocument4 pagesA Compact Low-Power Decimation Filter Sigma Delta ModulatorsmikeNo ratings yet
- 31 141 146 PDFDocument6 pages31 141 146 PDFlambanaveenNo ratings yet
- Low Power Reconfigurable FIR Filter for 3G Wireless < 40Document10 pagesLow Power Reconfigurable FIR Filter for 3G Wireless < 40Nischita KeerthiNo ratings yet
- Vasil o Poulos 2006Document12 pagesVasil o Poulos 2006Tanjiro NadivaNo ratings yet
- Energy Efficient EEG Acquisition and Reconstruction For A Wireless BodyDocument8 pagesEnergy Efficient EEG Acquisition and Reconstruction For A Wireless Bodyrajalakshmi boopathiNo ratings yet
- High-Frequency Digital Lock-In Amplifier Using Random SamplingDocument6 pagesHigh-Frequency Digital Lock-In Amplifier Using Random SamplingMaximiliano O SonnaillonNo ratings yet
- Evaluation of Cellular Distributed Power Control Algorithms in Wireless Ad Hoc NetworksDocument4 pagesEvaluation of Cellular Distributed Power Control Algorithms in Wireless Ad Hoc NetworkszbkhanianNo ratings yet
- LEACH Ad HocDocument10 pagesLEACH Ad HocHimadri BhattacharjeeNo ratings yet
- F0283111611-Ijsce Paper - SubirDocument5 pagesF0283111611-Ijsce Paper - SubirSubir MaityNo ratings yet
- Optimized Digital Filter Architectures For Multi-Standard RF TransceiversDocument15 pagesOptimized Digital Filter Architectures For Multi-Standard RF TransceiversvvigyaNo ratings yet
- Cascaded Integrator Comb Digital Filters Paper HogenauerDocument8 pagesCascaded Integrator Comb Digital Filters Paper HogenauerAkshay JayNo ratings yet
- Designing of IIR Filter Using Radix-4 Multiplier by Precharging TechniqueDocument8 pagesDesigning of IIR Filter Using Radix-4 Multiplier by Precharging TechniqueEditor IJTSRDNo ratings yet
- J 39 Mat Lab Program Crossover DesignDocument15 pagesJ 39 Mat Lab Program Crossover DesignismailNo ratings yet
- High-Performance D/A-Converters: Application to Digital TransceiversFrom EverandHigh-Performance D/A-Converters: Application to Digital TransceiversNo ratings yet
- Landmines Ground-Penetrating Radar Signal Enhancement by Digital FilteringDocument15 pagesLandmines Ground-Penetrating Radar Signal Enhancement by Digital FilteringGabriela AlvaradoNo ratings yet
- Digital Filtering in EEGIERP Analysis: Some Technical and Empirical ComparisonsDocument14 pagesDigital Filtering in EEGIERP Analysis: Some Technical and Empirical ComparisonsGabriela AlvaradoNo ratings yet
- Quotients Approximate Logarithms: Using Digital Filtering ApplicationsDocument9 pagesQuotients Approximate Logarithms: Using Digital Filtering ApplicationsGabriela AlvaradoNo ratings yet
- The Discrete-Time Bounded-Real Lemma in Digital FilteringDocument7 pagesThe Discrete-Time Bounded-Real Lemma in Digital FilteringGabriela AlvaradoNo ratings yet
- (PSFI) Monitoring of Heart and Respiratory Rates by Photoplethysmography Using A Digital Filtering TechniqueDocument8 pages(PSFI) Monitoring of Heart and Respiratory Rates by Photoplethysmography Using A Digital Filtering TechniqueGabriela AlvaradoNo ratings yet
- 1085 6140 PDFDocument233 pages1085 6140 PDFgabed24No ratings yet
- Item Description Unit QTY Rate (RM) Amount (RM) Addition A Internal Telephone InstallationDocument3 pagesItem Description Unit QTY Rate (RM) Amount (RM) Addition A Internal Telephone InstallationVasanthasehnan Ram RajaramNo ratings yet
- Fermi Distribution Function, Effect of Temperature On Fermi FunctionDocument2 pagesFermi Distribution Function, Effect of Temperature On Fermi Functionjainam sharma100% (2)
- Solar Photovoltaic Power For IndiaDocument74 pagesSolar Photovoltaic Power For IndiaH Janardan PrabhuNo ratings yet
- Micro 8050 Operating and Safety InstructionDocument92 pagesMicro 8050 Operating and Safety InstructionpruebapabloNo ratings yet
- Catalogue, Auto-3CTEST 汽车电子-英文高清Page 5Document1 pageCatalogue, Auto-3CTEST 汽车电子-英文高清Page 5Yusuf Ulas KABUKCUNo ratings yet
- Journal of Occupational Safety and Health: Dec 2004 Vol. 1 No. 2Document51 pagesJournal of Occupational Safety and Health: Dec 2004 Vol. 1 No. 2Mohdali MursidanNo ratings yet
- Rfid Based Automated Petrol PumpDocument18 pagesRfid Based Automated Petrol PumpPranjul Kushwaha100% (1)
- Aircraft Electrical, and Ignition SystemDocument32 pagesAircraft Electrical, and Ignition SystemKim RioverosNo ratings yet
- Check Pin TCM U660eDocument3 pagesCheck Pin TCM U660eTung NguyenNo ratings yet
- XVME-6200 VME - XembeddedDocument68 pagesXVME-6200 VME - XembeddedKevin BudzynskiNo ratings yet
- The History of The Integrated CircuitDocument38 pagesThe History of The Integrated CircuitDwaipayan BhattacharyaNo ratings yet
- FMCW Radar ThesisDocument117 pagesFMCW Radar Thesisphanikrishna84No ratings yet
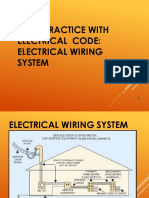
- Electrical Wiring SystemDocument10 pagesElectrical Wiring SystemJames Adrian Abalde Sabo100% (1)
- Low Power CMOS VLSI Design: Aditya Japa Assistant Professor (ECE) KL Hyderabad 12/07/2021Document14 pagesLow Power CMOS VLSI Design: Aditya Japa Assistant Professor (ECE) KL Hyderabad 12/07/2021karthikNo ratings yet
- Lecture 10: Power-Flow Studies: Instructor: Dr. Gleb V. Tcheslavski Contact: Office HoursDocument28 pagesLecture 10: Power-Flow Studies: Instructor: Dr. Gleb V. Tcheslavski Contact: Office HoursAn00pgadzillaNo ratings yet
- Introduction To Pneumatics and HydydraullicsDocument20 pagesIntroduction To Pneumatics and HydydraullicsDaniaNo ratings yet
- FC 360 Sales Presentation PDFDocument37 pagesFC 360 Sales Presentation PDFMinh NguyễnNo ratings yet
- HOT AXLE SpecificationDocument4 pagesHOT AXLE SpecificationAnonymous az2UUTNo ratings yet
- Brosur Singer PFCDocument3 pagesBrosur Singer PFCPutu Agus SantosaNo ratings yet
- PT - Wahana Agung IndonesiaDocument1 pagePT - Wahana Agung IndonesiaTonggi Lambok MarpaungNo ratings yet
- Fuzzy Logic For "Just Plain Folks "Document12 pagesFuzzy Logic For "Just Plain Folks "gNo ratings yet
- Firmware FixDocument5 pagesFirmware FixShelly KellerNo ratings yet
- AT-2048 Ether - Genius Ether10.Genius: User's ManualDocument168 pagesAT-2048 Ether - Genius Ether10.Genius: User's ManualDung Phan VanNo ratings yet
- Samsung Universal Gingerbread Root & Unroot 2.3.3-2.3.7Document27 pagesSamsung Universal Gingerbread Root & Unroot 2.3.3-2.3.7ricad1234No ratings yet
- Shielding and GroundingDocument4 pagesShielding and GroundingSaibuOluwaseyiNo ratings yet
- Motor Torque and Power: J. Michael MccarthyDocument7 pagesMotor Torque and Power: J. Michael MccarthySidney LinsNo ratings yet
- Polycrystalline Solar Module: An Everexceed High-Power Residential Solar Module Isan Aesthetic To Most Roofs AdditionDocument2 pagesPolycrystalline Solar Module: An Everexceed High-Power Residential Solar Module Isan Aesthetic To Most Roofs AdditionAmrina RosyadaNo ratings yet
- Deutz BF6M1015CPDocument6 pagesDeutz BF6M1015CPariefbelajar100% (2)
- Online Booking System For Car ParkingDocument4 pagesOnline Booking System For Car Parkingkalanakal9669No ratings yet