You might also like
- Research DevOps Implementation PDFDocument114 pagesResearch DevOps Implementation PDFrajduttNo ratings yet
- I. Problem DescriptionDocument8 pagesI. Problem Descriptionjessica llyNo ratings yet
- Chapter 7 - Shift RegisterDocument35 pagesChapter 7 - Shift RegisterHumna DubbiiNo ratings yet
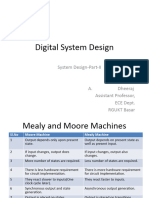
- System Design PartDocument53 pagesSystem Design PartKonga MadhukarNo ratings yet
- Solution - Ass # 8 - CH 8 - s2016Document4 pagesSolution - Ass # 8 - CH 8 - s2016Abigail EngleNo ratings yet
- Lec. 10 Seq. Cct. Part 4Document16 pagesLec. 10 Seq. Cct. Part 4عباس محمد عباس عبدالحسينNo ratings yet
- Exc TableDocument6 pagesExc TablelastbornNo ratings yet
- Car Security System-Recitation ExampleDocument3 pagesCar Security System-Recitation ExamplePRaed AliNo ratings yet
- Digital Design Lab: Snehangshu Bhattacharya 33 A 10900316057 4thDocument7 pagesDigital Design Lab: Snehangshu Bhattacharya 33 A 10900316057 4thJohn DoeNo ratings yet
- Figuring Out State TransitionsDocument7 pagesFiguring Out State TransitionsTanvon MalikNo ratings yet
- MealyaireDocument1 pageMealyaireTeki ChweNo ratings yet
- Lecture1 PDFDocument5 pagesLecture1 PDFvenkat venkiNo ratings yet
- DW 4 BitDocument2 pagesDW 4 BitmirosehNo ratings yet
- Lect19 Sequential Logic Part-3Document29 pagesLect19 Sequential Logic Part-3ramulakshmanan12No ratings yet
- FALLSEM2022-23 BECE102L TH VL2022230102871 Reference Material I 05-10-2022 22. Analysis of Clocked Sequential CircuitsDocument17 pagesFALLSEM2022-23 BECE102L TH VL2022230102871 Reference Material I 05-10-2022 22. Analysis of Clocked Sequential CircuitsAakashNo ratings yet
- Mendoza - Experiment No.8Document3 pagesMendoza - Experiment No.8Aldrin MndzNo ratings yet
- FlipFlop IntroductionDocument33 pagesFlipFlop IntroductionTeddy KhantNo ratings yet
- Hardwired Line Follower Autonomous Robot ManualDocument10 pagesHardwired Line Follower Autonomous Robot ManualSupratim DasNo ratings yet
- Maquina de Estado Finito Con MooreDocument12 pagesMaquina de Estado Finito Con MooreJuandiego Nuñez SalasNo ratings yet
- Troubleshooting Using Boot DiagnosticsDocument6 pagesTroubleshooting Using Boot DiagnosticsgmludNo ratings yet
- Counters RegistersDocument28 pagesCounters RegistersBaeNo ratings yet
- Dip Switch Setting EscaDocument1 pageDip Switch Setting EscaJabNo ratings yet
- Solution Boolean Raster WellDocument1 pageSolution Boolean Raster WelljalexvegaNo ratings yet
- Homework6 AnsDocument12 pagesHomework6 Ansnada abdelrahmanNo ratings yet
- Basics and Overview of Flip Flops-RevisedDocument5 pagesBasics and Overview of Flip Flops-Revisedatul211988No ratings yet
- For FF Synthesis GifDocument1 pageFor FF Synthesis GifRalph Gerard SangalangNo ratings yet
- Accelerometer Controlled WheelchairDocument6 pagesAccelerometer Controlled WheelchairBablooNo ratings yet
- COMP3721 Question Bank 2 Suggested Solution Pumping Theorem For Regular LanguagesDocument10 pagesCOMP3721 Question Bank 2 Suggested Solution Pumping Theorem For Regular LanguageskjhdskjhfkjfhNo ratings yet
- Line Following - Braitenberg, Robot ExamplesDocument79 pagesLine Following - Braitenberg, Robot ExamplespoornaNo ratings yet
- Good Job1561Document5 pagesGood Job1561Mazin AlwanNo ratings yet
- Left Left Middle Front Right Middle Right DirectionDocument1 pageLeft Left Middle Front Right Middle Right DirectionShahram Najam SyedNo ratings yet
- LinetracerDocument3 pagesLinetracerMamat SeptyanNo ratings yet
- Ic Flip-FlopDocument26 pagesIc Flip-FlopMarlon AranasNo ratings yet
- Experiment 8: Counting Circuits: (Assignment)Document3 pagesExperiment 8: Counting Circuits: (Assignment)AL Asmr YamakNo ratings yet
- 37 DLD Lec 37 Design of Sequential Circuits Example Dated 09 Dec 2022 Lecture SlidesDocument18 pages37 DLD Lec 37 Design of Sequential Circuits Example Dated 09 Dec 2022 Lecture SlidesZuha FatimaNo ratings yet
- Large Angle Rutherford Scattering of α-Particles from Gold FoilDocument12 pagesLarge Angle Rutherford Scattering of α-Particles from Gold Foilharoon khanNo ratings yet
- Gerbang LogikaDocument19 pagesGerbang LogikalailyNo ratings yet
- Module 2 BookDocument34 pagesModule 2 Booksammy CNo ratings yet
- Sequential Logic: Analysis and Design of Sequential CircuitsDocument12 pagesSequential Logic: Analysis and Design of Sequential Circuitsمنار المالكيNo ratings yet
- Ch. 3: Forward and Inverse Kinematics: KON 318E: Introduction To Robotics 1Document79 pagesCh. 3: Forward and Inverse Kinematics: KON 318E: Introduction To Robotics 1Dursun DurmasınNo ratings yet
- Digital Circuits - CountersDocument6 pagesDigital Circuits - CountersTanmay HazraNo ratings yet
- Estructuras 2d Ejemplo 3 Metodo 1 ComprobadoDocument97 pagesEstructuras 2d Ejemplo 3 Metodo 1 ComprobadoDIEGO MARTIN ROLANDO CORDOVA PINDAYNo ratings yet
- Navigation of PIC Based Robot Using Shortest Path Planning AlgorithmDocument43 pagesNavigation of PIC Based Robot Using Shortest Path Planning Algorithmkarishma10No ratings yet
- Shift Registers NotesDocument146 pagesShift Registers NotesRajat KumarNo ratings yet
- TresDocument4 pagesTresKyle GambalaNo ratings yet
- Task Performance in Data and Digital CommunicationsDocument1 pageTask Performance in Data and Digital CommunicationsCzed PalmosNo ratings yet
- Mekton Zeta - Mecha Lab RebuiltDocument52 pagesMekton Zeta - Mecha Lab RebuiltBlake CaparoonNo ratings yet
- 023 PLC Basic Exercises Sheet UnsolvedDocument3 pages023 PLC Basic Exercises Sheet UnsolvedDoğan YolluNo ratings yet
- PLC Basic Exercises For DeltaDocument3 pagesPLC Basic Exercises For DeltaYasirSwatiNo ratings yet
- Quiz - 2Document7 pagesQuiz - 2Ankit GargNo ratings yet
- Basic Electronics (18ELN14/18ELN24) - Introduction To Sequential Circuits (Module 5)Document18 pagesBasic Electronics (18ELN14/18ELN24) - Introduction To Sequential Circuits (Module 5)Shrishail BhatNo ratings yet
- 10-Computer Instruction and Instructions Sets-01-02-2024Document19 pages10-Computer Instruction and Instructions Sets-01-02-2024Baladhithya TNo ratings yet
- Experiment 3 - CSC 204 LabDocument7 pagesExperiment 3 - CSC 204 Lab2221634No ratings yet
- Mekton Zeta Mecha Lab v0.5Document52 pagesMekton Zeta Mecha Lab v0.5CalNo ratings yet
- Chapter 05Document28 pagesChapter 05MudassarNo ratings yet
- Timing Diagram JK-FLIP-FLOP (PJJ) PDFDocument7 pagesTiming Diagram JK-FLIP-FLOP (PJJ) PDFSiti KhodijahNo ratings yet
- Assignment#04Document3 pagesAssignment#04sujan shresthaNo ratings yet
- 20BSC1017 Exp 5Document5 pages20BSC1017 Exp 5Prabh deepNo ratings yet
- Automation and Robotics Lab ActivityDocument6 pagesAutomation and Robotics Lab Activitybilal naseem100% (1)
- What's Cooking: Digital Transformation of the Agrifood SystemFrom EverandWhat's Cooking: Digital Transformation of the Agrifood SystemNo ratings yet
- T6963CDocument28 pagesT6963Capi-19831863No ratings yet
- Communication System Design Using DSP PDFDocument2 pagesCommunication System Design Using DSP PDFPamNo ratings yet
- UsbFix ReportDocument4 pagesUsbFix Reportle poete ModiNo ratings yet
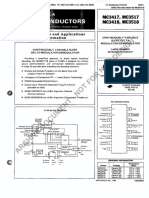
- IC - MC3417 - MC3418 - DatasheetsDocument20 pagesIC - MC3417 - MC3418 - Datasheetsmnolasco2009No ratings yet
- SDIC 11marks (Q Only) (Unit 1 To 5)Document2 pagesSDIC 11marks (Q Only) (Unit 1 To 5)Ganapathy RamadossNo ratings yet
- Professional English in Use ICT You and Computers Answer KeysDocument9 pagesProfessional English in Use ICT You and Computers Answer KeysOksana KurinnaNo ratings yet
- Cooking With Shadow Hills Mastering Compressor Class-A Limited Edition (Fabulous Audio Recipes)Document13 pagesCooking With Shadow Hills Mastering Compressor Class-A Limited Edition (Fabulous Audio Recipes)Christian Schäfer ID 042No ratings yet
- IGBT: Insulated-Gate Bipolar Transistor: - Combination BJT and MOSFETDocument15 pagesIGBT: Insulated-Gate Bipolar Transistor: - Combination BJT and MOSFETamit kumarNo ratings yet
- Open Cursor ReferenceDocument2 pagesOpen Cursor ReferenceZin Min HtetNo ratings yet
- Panasonic Minas A6 Technical ReferenceDocument312 pagesPanasonic Minas A6 Technical ReferenceVahe YeghyanNo ratings yet
- Info 02-2022 - ENDocument3 pagesInfo 02-2022 - ENjorge.88No ratings yet
- Sprinter DataLoader Instruction Rev134Document21 pagesSprinter DataLoader Instruction Rev134Fernan Chavez NavarroNo ratings yet
- Cours Nios AlteraDocument76 pagesCours Nios AlteraAjeeshAzeezNo ratings yet
- Introduction To Damped ExperimentDocument2 pagesIntroduction To Damped ExperimentLeon TetemuNo ratings yet
- Flowchart Is The Graphical or Pictorial Representation of An Algorithm WithDocument6 pagesFlowchart Is The Graphical or Pictorial Representation of An Algorithm WithLohithokNo ratings yet
- Printed Circuit Boards Designing and Its Fabrication MethodsDocument54 pagesPrinted Circuit Boards Designing and Its Fabrication MethodsZaryab QaziNo ratings yet
- Windchill InstallationDocument3 pagesWindchill InstallationrrNo ratings yet
- HVPFC2PHILDocument33 pagesHVPFC2PHILQuyền TrịnhNo ratings yet
- 1 - MIT - Coimbatore ProspectusDocument43 pages1 - MIT - Coimbatore Prospectussangeethathangavel91No ratings yet
- Lecture-1 (Final) Processor Logic Design: American Internaional University - BangladeshDocument31 pagesLecture-1 (Final) Processor Logic Design: American Internaional University - Bangladeshsifat islamNo ratings yet
- Blue Ray DiskDocument6 pagesBlue Ray DiskManpreet SachdevaNo ratings yet
- Satellite m30x MANUALDocument211 pagesSatellite m30x MANUALAlcindo TaroNo ratings yet
- Oracle Engineered Systems Price List: September 17, 2019Document13 pagesOracle Engineered Systems Price List: September 17, 2019Mikhail MukhanovNo ratings yet
- Dell Networking X-Series Auto-Configuration Deployment GuideDocument18 pagesDell Networking X-Series Auto-Configuration Deployment GuidetecnologiaciaNo ratings yet
- Tvn-11Smir: Only Analogue Output SONY 1.3M 960PDocument3 pagesTvn-11Smir: Only Analogue Output SONY 1.3M 960PMondiNo ratings yet
- FM - 4007-9101Document2 pagesFM - 4007-9101JORGE LUIS VALENCIA CHIRINOSNo ratings yet
- Control Panel DatasheetDocument2 pagesControl Panel DatasheetSenn OdrapmasdNo ratings yet
- MX C630 - C730 e 4 Troub PDFDocument9 pagesMX C630 - C730 e 4 Troub PDFIvanilto Martins da CruzNo ratings yet
- State Captured at ADocument373 pagesState Captured at AMatthew MathewsNo ratings yet