You might also like
- Pre-Dive and Six HourlyDocument1 pagePre-Dive and Six Hourlydragos vulcanNo ratings yet
- 2010 Herdzik Propulsion CharacteristicsDocument8 pages2010 Herdzik Propulsion CharacteristicsSamo SpontanostNo ratings yet
- Proposals of Unconventional Thrusters Applications For Multi-Mode Ship PropulsionDocument12 pagesProposals of Unconventional Thrusters Applications For Multi-Mode Ship PropulsionCip GrecuNo ratings yet
- Hamworthy St2aDocument4 pagesHamworthy St2aAdnanNo ratings yet
- Fugro 3510 LR Menu Quick Reference GuideDocument1 pageFugro 3510 LR Menu Quick Reference GuideDouglas BemficaNo ratings yet
- Achieving Fuel Savings For Anchor Handling Tug Supply Vessels Through Electric Propulsion - ABBDocument4 pagesAchieving Fuel Savings For Anchor Handling Tug Supply Vessels Through Electric Propulsion - ABByw_oulalaNo ratings yet
- Dpcs5723 73m Ahts X 2Document18 pagesDpcs5723 73m Ahts X 2123No ratings yet
- Power Management System PMA 300: Remote Human Machine Interface Protocol DescriptionDocument23 pagesPower Management System PMA 300: Remote Human Machine Interface Protocol Descriptionhamzeh0% (1)
- 3 Power.Document4 pages3 Power.nancy domimguez moralesNo ratings yet
- The PI CheatSheet for Measuring Ship PerformanceDocument8 pagesThe PI CheatSheet for Measuring Ship Performancenidhink18No ratings yet
- 72271-410-001-F Topology Drawing MOL 928 - As Built - With CloudsDocument20 pages72271-410-001-F Topology Drawing MOL 928 - As Built - With CloudsTseng EthanNo ratings yet
- Lesson Plan: Course: DP Vessel Maintainer CourseDocument70 pagesLesson Plan: Course: DP Vessel Maintainer CourseMate CeradaNo ratings yet
- Water Removal From Thruster Lubricants Using New TechnologiesDocument9 pagesWater Removal From Thruster Lubricants Using New TechnologieseajNo ratings yet
- The 7th Element: Managing DP Competence and ProjectsDocument15 pagesThe 7th Element: Managing DP Competence and ProjectsBebincaNo ratings yet
- Activity in Dec: Specific LN Supply Operations BlntunlDocument3 pagesActivity in Dec: Specific LN Supply Operations BlntunlPetta TengeNo ratings yet
- BMTDSL The Advanced Waterjet Confpaper INEC May10 PDFDocument13 pagesBMTDSL The Advanced Waterjet Confpaper INEC May10 PDFhieuhuech1No ratings yet
- AvaraDocument10 pagesAvaraElchin SattarovNo ratings yet
- Stability-Comparison of Various Codes Etc Rev 0Document1 pageStability-Comparison of Various Codes Etc Rev 0Sew Chi ZhongNo ratings yet
- 2x WLSV - Specification Rev 0Document69 pages2x WLSV - Specification Rev 0pal_malayNo ratings yet
- Nexans Norway AS m/v Elektron 2009 Annual DP trials reportDocument50 pagesNexans Norway AS m/v Elektron 2009 Annual DP trials reportRamon Teixeira DiasNo ratings yet
- Marine 2017 18 - Propeller Nozzles DesignDocument13 pagesMarine 2017 18 - Propeller Nozzles DesignMaciej ReichelNo ratings yet
- Ld2 Verify DP Operations Manual - Ab-V-ma-00514 - Rev 1cDocument72 pagesLd2 Verify DP Operations Manual - Ab-V-ma-00514 - Rev 1cGleison PrateadoNo ratings yet
- 04 - K-Pos Auto TrackDocument122 pages04 - K-Pos Auto TrackMarv-Vic Santos100% (1)
- DP Operator Manual Section 8 Lightweight Taut Wire SystemsDocument5 pagesDP Operator Manual Section 8 Lightweight Taut Wire SystemsKunal SinghNo ratings yet
- Class NK Autonomous ShipsDocument154 pagesClass NK Autonomous ShipsSubrata BhattacharyaNo ratings yet
- MEPC 1-Circ 878Document13 pagesMEPC 1-Circ 878Li Ann ChungNo ratings yet
- Navigat X MK 1: Microprocessor Controlled Digital Gyrocompass SystemDocument4 pagesNavigat X MK 1: Microprocessor Controlled Digital Gyrocompass SystemNguyen Phuoc HoNo ratings yet
- Chapter 1 HCX3 User ManualDocument111 pagesChapter 1 HCX3 User ManualSergei Kurpish100% (1)
- K Pos Seismic Track Mode - OM 7.1Document30 pagesK Pos Seismic Track Mode - OM 7.1Rafael AlvaresNo ratings yet
- Emergency Stop & Idle Timer System Liebh 9400Document2 pagesEmergency Stop & Idle Timer System Liebh 9400Nova kurniawan 34No ratings yet
- DP Operator Manual 1. Procedure To Set Up The Alstom NutcrackerDocument10 pagesDP Operator Manual 1. Procedure To Set Up The Alstom NutcrackerKunal SinghNo ratings yet
- Appendix GDocument46 pagesAppendix GMohammed HassanNo ratings yet
- D20-D21-D22 - Hull Structure Monitoring System and VDR - 07-12-09 V6Document52 pagesD20-D21-D22 - Hull Structure Monitoring System and VDR - 07-12-09 V6CalandrasReyCalandrasreyNo ratings yet
- Topic Dynamic PositoningDocument116 pagesTopic Dynamic PositoningJorge CiprianoNo ratings yet
- DYNAMIC POSITIONING INTRODUCTIONDocument31 pagesDYNAMIC POSITIONING INTRODUCTIONArun SNo ratings yet
- ACO Marine Data Sheet Clarimar MF v3 2014 (00000002)Document2 pagesACO Marine Data Sheet Clarimar MF v3 2014 (00000002)HAYDEENo ratings yet
- 0907 - A - Support Thruster 5 Year OverhaulsDocument21 pages0907 - A - Support Thruster 5 Year OverhaulsonlyourzNo ratings yet
- UR A Pdf148 Mooring AnchoringDocument21 pagesUR A Pdf148 Mooring AnchoringMeleti Meleti MeletiouNo ratings yet
- Alfa Laval Emmie2 Heater 9016159 80 81 Rev8Document96 pagesAlfa Laval Emmie2 Heater 9016159 80 81 Rev8Amado RodriguezNo ratings yet
- Vdocuments - MX Maneouvering Booklet SampleDocument42 pagesVdocuments - MX Maneouvering Booklet SampleSamiNo ratings yet
- 1 Technical Course Vol1Document318 pages1 Technical Course Vol1Electrifying GuyNo ratings yet
- Spring Return and Double Acting Pneumatic Quarter-Turn Actuators For Output Torques To 27,624 LB - inDocument8 pagesSpring Return and Double Acting Pneumatic Quarter-Turn Actuators For Output Torques To 27,624 LB - inThanh Vuong NguyenNo ratings yet
- DP FootPrint (Amended)Document5 pagesDP FootPrint (Amended)amu_more44No ratings yet
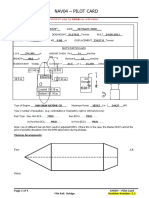
- Nav04 - Pilot Card: The Officer Completing The Checklist MUST Enter His Initials As ConfirmationDocument4 pagesNav04 - Pilot Card: The Officer Completing The Checklist MUST Enter His Initials As ConfirmationКонстантин КулаковNo ratings yet
- AAC-115922-01MU (A) Icon DPDocument579 pagesAAC-115922-01MU (A) Icon DPJurij PNo ratings yet
- DP design studies analysisDocument14 pagesDP design studies analysisboreidyNo ratings yet
- Conditiion of ClassificationDocument55 pagesConditiion of ClassificationVeeraiah AnbuNo ratings yet
- Transfers of major conventional weapons: 1950-2015Document120 pagesTransfers of major conventional weapons: 1950-2015Estuardo MolinaNo ratings yet
- EM ReleasenoteDocument24 pagesEM ReleasenoteJanosi ParaNo ratings yet
- 04-Analog Celsa Eng WebDocument44 pages04-Analog Celsa Eng WebtafseerahmedNo ratings yet
- UntitledDocument1 pageUntitledMate CeradaNo ratings yet
- Seatex MRU H PDFDocument2 pagesSeatex MRU H PDFCindy0% (1)
- EnquiryDocument24 pagesEnquirySarath PurushothamanNo ratings yet
- MFD 3 00 340 ECDIS Quick Guide PDFDocument8 pagesMFD 3 00 340 ECDIS Quick Guide PDFStolker2012No ratings yet
- Towage of Small VesselsDocument1 pageTowage of Small VesselshgmNo ratings yet
- CPP Chan Vit Bien Buoc PDFDocument335 pagesCPP Chan Vit Bien Buoc PDFKhoai Sai GonNo ratings yet
- Safe Working LoadDocument16 pagesSafe Working LoadHugo Vco RvaNo ratings yet
- Class Notations (LR)Document4 pagesClass Notations (LR)Swayamjeet BeheraNo ratings yet
- 7 5-04-01-01.2 Analysis of Speed Power Trial Data PDFDocument25 pages7 5-04-01-01.2 Analysis of Speed Power Trial Data PDFNestor Gómez RojasNo ratings yet
- Dead Reckoning PDFDocument6 pagesDead Reckoning PDFChiazor KevinNo ratings yet
- Re-Install The Cable Cover.: Installing The Second Hard Disk Drive For The B-Series TouchcomputerDocument2 pagesRe-Install The Cable Cover.: Installing The Second Hard Disk Drive For The B-Series TouchcomputerjfgohlkeNo ratings yet
- Installing The Fingerprint Reader For The B-Series TouchcomputerDocument2 pagesInstalling The Fingerprint Reader For The B-Series TouchcomputerjfgohlkeNo ratings yet
- Installing The Memory Upgrade Kit For The B-Series TouchcomputerDocument2 pagesInstalling The Memory Upgrade Kit For The B-Series TouchcomputerjfgohlkeNo ratings yet
- 1,000ft Bulk 6 Fiber Singlemode Fiber Optic Cable - YellowDocument3 pages1,000ft Bulk 6 Fiber Singlemode Fiber Optic Cable - YellowjfgohlkeNo ratings yet
- Setup Instructions: Eynio Server Setup InstructionDocument7 pagesSetup Instructions: Eynio Server Setup InstructionjfgohlkeNo ratings yet
- Speaker JBLCtrl24C ManualDocument19 pagesSpeaker JBLCtrl24C ManualalexmilarNo ratings yet
- Video - How Can I Combine 30,000 Images Into A Timelapse Movie - Super UserDocument10 pagesVideo - How Can I Combine 30,000 Images Into A Timelapse Movie - Super UserjfgohlkeNo ratings yet
- Synology Transactions User's Guide: Surveillance Station 8.0.0 and AboveDocument35 pagesSynology Transactions User's Guide: Surveillance Station 8.0.0 and AbovejfgohlkeNo ratings yet
- AW-NB110H WiFi Chipset Awnb110h0b - v.1.0 - StandardDocument13 pagesAW-NB110H WiFi Chipset Awnb110h0b - v.1.0 - StandardjfgohlkeNo ratings yet
- 6010 Richmond Ave Marketing BrochureFlyerDocument5 pages6010 Richmond Ave Marketing BrochureFlyerjfgohlkeNo ratings yet
- Centos - Finding Source of 100% CPU Usage - Server FaultDocument6 pagesCentos - Finding Source of 100% CPU Usage - Server FaultjfgohlkeNo ratings yet
- Age of Propaganda The Everyday Use and Abuse of PersuasionDocument172 pagesAge of Propaganda The Everyday Use and Abuse of PersuasionIndrit NikjariNo ratings yet
- Light DinghyDocument1 pageLight DinghyjfgohlkeNo ratings yet
- AnsibleDocument3 pagesAnsiblejfgohlkeNo ratings yet
- Intel Xeon E5-2670 at 2.60GHz Vs Intel Core I7-6700k at 4.00GHz (Cpubenchmark - Net) by PassMark SoftwareDocument3 pagesIntel Xeon E5-2670 at 2.60GHz Vs Intel Core I7-6700k at 4.00GHz (Cpubenchmark - Net) by PassMark SoftwarejfgohlkeNo ratings yet
- Global Maritime Distress& SafetyDocument6 pagesGlobal Maritime Distress& SafetyEng_2014No ratings yet
- 12.hyperbolic SystemsDocument18 pages12.hyperbolic SystemsGheorghiescu IonNo ratings yet
- Compass Checks: ExampleDocument4 pagesCompass Checks: ExamplejfgohlkeNo ratings yet
- Operating Concept Collision AvoidanceDocument6 pagesOperating Concept Collision AvoidancejfgohlkeNo ratings yet
- Astronomy PDFDocument48 pagesAstronomy PDFAamir SirohiNo ratings yet
- LAN Speed Test (Version 4)Document17 pagesLAN Speed Test (Version 4)jfgohlkeNo ratings yet
- SEO Spider Configuration - Screaming FrogDocument55 pagesSEO Spider Configuration - Screaming FrogjfgohlkeNo ratings yet
- Planning For Emergency NavigationDocument10 pagesPlanning For Emergency NavigationjfgohlkeNo ratings yet
- TAB 1 Fundamentals - Chapter 2 - Geodesy and Datums in Navigation PDFDocument8 pagesTAB 1 Fundamentals - Chapter 2 - Geodesy and Datums in Navigation PDFYogesh MalhotraNo ratings yet
- Schlage Keypad Locks FAQs - Electronic Deadbolt - Keypad LeverDocument4 pagesSchlage Keypad Locks FAQs - Electronic Deadbolt - Keypad LeverjfgohlkeNo ratings yet
- James Hardie HardiePlank HZ10 5 - 16 In. X 12 In. X 144 In. Fiber Cement Primed Cedarmill Lap Siding-215573 - The Home DepotDocument9 pagesJames Hardie HardiePlank HZ10 5 - 16 In. X 12 In. X 144 In. Fiber Cement Primed Cedarmill Lap Siding-215573 - The Home DepotjfgohlkeNo ratings yet
- 6010 Richmond Ave Marketing BrochureFlyerDocument5 pages6010 Richmond Ave Marketing BrochureFlyerjfgohlkeNo ratings yet
- Alternative OS Options for Thecus 5200/pro NASDocument9 pagesAlternative OS Options for Thecus 5200/pro NASjfgohlkeNo ratings yet
- 96V Motorcycle Battery Bank Equalizer Transformer Battery Balance - Battery Equalizer - Shenzhen HUAXIAO Technology Co.,LtdDocument5 pages96V Motorcycle Battery Bank Equalizer Transformer Battery Balance - Battery Equalizer - Shenzhen HUAXIAO Technology Co.,LtdjfgohlkeNo ratings yet
- FCL Shipment Specific Quotation For BRIDGESTONE AMERICAS INCDocument3 pagesFCL Shipment Specific Quotation For BRIDGESTONE AMERICAS INCmustova81No ratings yet
- Metacut 350: Operating and Instructions ManualDocument20 pagesMetacut 350: Operating and Instructions ManualRohman AzizNo ratings yet
- 2021 SC Hurricane GuideDocument16 pages2021 SC Hurricane GuideWMBF News100% (1)
- Ch02 World Trade An Overview 1Document32 pagesCh02 World Trade An Overview 1XIKAMNo ratings yet
- Engineering Mathematics For Gate Chapter1Document1 pageEngineering Mathematics For Gate Chapter1Sai VeerendraNo ratings yet
- DATASHEET Transistor 13003ADDocument4 pagesDATASHEET Transistor 13003ADCarlos MoraNo ratings yet
- Water Cycle Cer 002Document2 pagesWater Cycle Cer 002api-434008934No ratings yet
- Mendeley Data - Lowbrasys Brake Wear Cycle - 3h LACTDocument3 pagesMendeley Data - Lowbrasys Brake Wear Cycle - 3h LACTMini VargheseNo ratings yet
- Mktech PDFDocument7 pagesMktech PDFAlexander WieseNo ratings yet
- Creating A 3D-Map Using Reference Points: Cfr-19-Stm-CanadasatDocument14 pagesCreating A 3D-Map Using Reference Points: Cfr-19-Stm-Canadasattuguldur bayaraaNo ratings yet
- Thesis Defence Public Presentation FinalDocument16 pagesThesis Defence Public Presentation FinalAlina AndreevNo ratings yet
- India's Power Industry History and FutureDocument11 pagesIndia's Power Industry History and FutureMinesh Chand MeenaNo ratings yet
- Suvarnaprashan Sanskar EnglishDocument4 pagesSuvarnaprashan Sanskar EnglishLifecare Ayurveda Drnikul PatelNo ratings yet
- Industrial Training IntroductionDocument1 pageIndustrial Training Introductionsgurjar07No ratings yet
- Mine Pool AtlasDocument172 pagesMine Pool AtlasRishiraj SahooNo ratings yet
- Joycie 4-7Document2 pagesJoycie 4-7Jay VillasotoNo ratings yet
- CKB 20104 Reaction Engineering UniKL MICET Experiment 1a: The Batch Saponification of Ethyl Acetate Full Lab ReportDocument11 pagesCKB 20104 Reaction Engineering UniKL MICET Experiment 1a: The Batch Saponification of Ethyl Acetate Full Lab ReportSiti Hajar Mohamed82% (11)
- Toyota Vehicle Glossary TermsDocument31 pagesToyota Vehicle Glossary TermsEdward Ugochukwu AdighibeNo ratings yet
- Unit 1 Purva Swadhyaya QuestionsDocument4 pagesUnit 1 Purva Swadhyaya QuestionsSurrender to Krishna AlwaysNo ratings yet
- ASME B36.10M-2004 Welded and Seamless Wrought Steel Pipe StandardDocument2 pagesASME B36.10M-2004 Welded and Seamless Wrought Steel Pipe StandardAmit BansalNo ratings yet
- Mind Map AvalanchesDocument3 pagesMind Map AvalanchescgmaliaNo ratings yet
- Variac MFG Business Plan Annexure - 1Document6 pagesVariac MFG Business Plan Annexure - 1Manav MatetiNo ratings yet
- Learning Activity Sheet In: Computer Systems ServicingDocument12 pagesLearning Activity Sheet In: Computer Systems ServicingCarvalds 0315No ratings yet
- Irrigation Project ManualDocument66 pagesIrrigation Project ManualHorace Prophetic DavisNo ratings yet
- PM TB Solutions C03Document5 pagesPM TB Solutions C03Vishwajeet Ujhoodha100% (5)
- Acoustic Design For Call CenterDocument16 pagesAcoustic Design For Call CenteraliNo ratings yet
- Boiler BlowdownDocument2 pagesBoiler BlowdownbaratheonNo ratings yet
- UNIVERGE SV9100 Hardware Manual - Issue 9.1Document574 pagesUNIVERGE SV9100 Hardware Manual - Issue 9.1TonyNo ratings yet
- Ujian Akhir Semester Gasal Dinas Pendidikan Kabupaten Sukabumi SMP Negeri 1 Cireunghas TAHUN PELAJARAN 2017/ 2018Document3 pagesUjian Akhir Semester Gasal Dinas Pendidikan Kabupaten Sukabumi SMP Negeri 1 Cireunghas TAHUN PELAJARAN 2017/ 2018DodiSaputraNo ratings yet
- Subway's Fresh Look: CEO Suzanne Greco Is Taking The Company To A Whole New Level With The Fresh Forward RebrandDocument9 pagesSubway's Fresh Look: CEO Suzanne Greco Is Taking The Company To A Whole New Level With The Fresh Forward RebrandTanvir KhanNo ratings yet