You might also like
- YOGAS1Document6 pagesYOGAS1Narayana RemalaNo ratings yet
- A Detailed Explanation of Solenoid ForceDocument8 pagesA Detailed Explanation of Solenoid ForceidescitationNo ratings yet
- Tricks in Designing and Analyzing Schematics and Diagrams of High Voltage SubstationsDocument17 pagesTricks in Designing and Analyzing Schematics and Diagrams of High Voltage SubstationsJerry Cañero100% (1)
- Marriage Issues-1Document21 pagesMarriage Issues-1Edward100% (1)
- From Schematic To Reality: Understanding SchematicsDocument13 pagesFrom Schematic To Reality: Understanding SchematicsjosemaneiraNo ratings yet
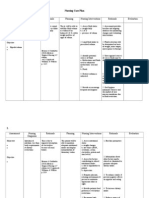
- Nursing Care Plan CKDDocument6 pagesNursing Care Plan CKDReylan Deo Rallo Asio100% (5)
- AdMU Department of Biology Undergraduate Programs Prospectus v. 2020Document74 pagesAdMU Department of Biology Undergraduate Programs Prospectus v. 2020Ronald CruzNo ratings yet
- The Space RaceDocument15 pagesThe Space RaceRadu Petrusan100% (1)
- CH 13 Lecture PresentationDocument97 pagesCH 13 Lecture PresentationDalia M. MohsenNo ratings yet
- LCL Filter DesignDocument8 pagesLCL Filter DesignAlex RochaNo ratings yet
- Bond Graphs of The Electrical ELC CircuitDocument9 pagesBond Graphs of The Electrical ELC CircuitkdjgkldfjlNo ratings yet
- Bond Graphs of The Electrical RLC Circuit: KeywordsDocument6 pagesBond Graphs of The Electrical RLC Circuit: KeywordsAndy ReynoldsNo ratings yet
- EE307-Topic#2 - PS Modelling & The PU SystemDocument32 pagesEE307-Topic#2 - PS Modelling & The PU SystemImma TzNo ratings yet
- EE304 - 20160819 GRPH ThryDocument8 pagesEE304 - 20160819 GRPH ThryJoyprakash LairenlakpamNo ratings yet
- BuckDocument8 pagesBuckWoldie KassieNo ratings yet
- 4727-Article Text-8485-1-10-20130718Document15 pages4727-Article Text-8485-1-10-20130718M4gne7icNo ratings yet
- Electronic Circuit Simulation With Ideal Switches: Van Co Litovski, Milan Savi C and Zeljko MR CaricaDocument20 pagesElectronic Circuit Simulation With Ideal Switches: Van Co Litovski, Milan Savi C and Zeljko MR CaricabalamuruganeeedptNo ratings yet
- Theoretical and Experimental Studies of SMES Configurations For Design OptimizationDocument5 pagesTheoretical and Experimental Studies of SMES Configurations For Design OptimizationBALASUNDAR CNo ratings yet
- Models - Acdc.mutual Inductance PDFDocument26 pagesModels - Acdc.mutual Inductance PDFneomindxNo ratings yet
- Emtp PDFDocument34 pagesEmtp PDFagkacdm1163100% (1)
- Robust Op Amp Realization of Chuas CircuitDocument27 pagesRobust Op Amp Realization of Chuas CircuitNoahArayaNo ratings yet
- Generalized Models of Basic DC-DC Converters: Articles You May Be Interested inDocument8 pagesGeneralized Models of Basic DC-DC Converters: Articles You May Be Interested inkumarNo ratings yet
- Non-Control Transformer Inrush Current: A LimiterDocument6 pagesNon-Control Transformer Inrush Current: A LimiterNohelia CruzNo ratings yet
- Dynamics of Electromechanical Systems: March 1996Document13 pagesDynamics of Electromechanical Systems: March 1996WendymahesNo ratings yet
- Sheet 2Document7 pagesSheet 2Mohamed AlshaerNo ratings yet
- Some Comments To Analog Wave Filters DesignDocument4 pagesSome Comments To Analog Wave Filters DesignkunalkundanamNo ratings yet
- Lecture Notes 2: 2. Series and Parallel CircuitsDocument26 pagesLecture Notes 2: 2. Series and Parallel CircuitsAlejandro Ca MaNo ratings yet
- Analytica Methods For The Extraction of Parameters For Solar Cells EquationsDocument8 pagesAnalytica Methods For The Extraction of Parameters For Solar Cells Equationsdiego.pavanello7081No ratings yet
- Modeling of DC DC Converter PDFDocument6 pagesModeling of DC DC Converter PDFVishal AryaNo ratings yet
- Design and Implementation of A PI-MPPT Based Buck-Boost ConverterDocument6 pagesDesign and Implementation of A PI-MPPT Based Buck-Boost ConverterWesley de PaulaNo ratings yet
- Design and Implementation of A PI-MPPT Based Buck-Boost ConverterDocument6 pagesDesign and Implementation of A PI-MPPT Based Buck-Boost ConverterLatifa OuchallaNo ratings yet
- PExprt From UPM PDFDocument6 pagesPExprt From UPM PDFSubramaniam AravinthNo ratings yet
- MatlabDocument5 pagesMatlabhimanshuNo ratings yet
- Expt 5.2Document6 pagesExpt 5.2Joel CatapangNo ratings yet
- Circuit TheoryDocument534 pagesCircuit TheorysuhelNo ratings yet
- Tle 9 - Q2 - W7-8 (Reymondsumaylo)Document3 pagesTle 9 - Q2 - W7-8 (Reymondsumaylo)REYMOND SUMAYLONo ratings yet
- IEEE Conference Template ExampleDocument6 pagesIEEE Conference Template Exampleanks202No ratings yet
- Iet-Epa 2010 0114Document7 pagesIet-Epa 2010 0114leivajNo ratings yet
- Design and Implementation of Uninterruptible Power Supplies For Fluorescent Lamps With Electronic BallastDocument8 pagesDesign and Implementation of Uninterruptible Power Supplies For Fluorescent Lamps With Electronic BallastCesar DelacroixNo ratings yet
- Experiment 2 20 - 21Document11 pagesExperiment 2 20 - 21Mohd khalil AkherNo ratings yet
- Research Article: Simulations of Transformer Inrush Current by Using BDF-Based Numerical MethodsDocument11 pagesResearch Article: Simulations of Transformer Inrush Current by Using BDF-Based Numerical MethodsDavid LopesNo ratings yet
- Feedback Theory - Further Properties of Signal Flow Graphs - SAMUEL J. MASONDocument7 pagesFeedback Theory - Further Properties of Signal Flow Graphs - SAMUEL J. MASONCristhian Moscoso AchahuancoNo ratings yet
- Simulation of Electric Machinery and Power Electronics InterfacingDocument6 pagesSimulation of Electric Machinery and Power Electronics Interfacingadilo7780No ratings yet
- EEET2249 Lecture Notes 1 2013Document78 pagesEEET2249 Lecture Notes 1 2013Garry YinNo ratings yet
- Lab 11Document14 pagesLab 11Zain AhmedNo ratings yet
- 2014 APEC Thermal Analysis of A SubmodulDocument7 pages2014 APEC Thermal Analysis of A SubmodulNAM PHẠM LÊNo ratings yet
- An Equivalent Circuit Model of Miniature Double E-Shaped Meander Line Printed Monopole AntennaDocument5 pagesAn Equivalent Circuit Model of Miniature Double E-Shaped Meander Line Printed Monopole AntennababuNo ratings yet
- 1-IEE SGB Semiconductor Devices BE Opposition MethodDocument4 pages1-IEE SGB Semiconductor Devices BE Opposition MethodJuan David PabonNo ratings yet
- HW 3Document3 pagesHW 3Localized Prayer App0% (1)
- Application of Simple Adaptive Control To A DC DC Boost Converter With Load Variation Iccas-Sice09 GoojongDocument6 pagesApplication of Simple Adaptive Control To A DC DC Boost Converter With Load Variation Iccas-Sice09 GoojongAMIR SOHAILNo ratings yet
- Elt02 Module7Document8 pagesElt02 Module7darylamora522No ratings yet
- Converter Modeling EL - 18 - 1 - 06Document7 pagesConverter Modeling EL - 18 - 1 - 06sf111No ratings yet
- Activity 2B Impedance of RL Circuits: Parallel RL Curcuits 2B.1 Program Outcomes (Pos) Addressed by The ActivityDocument8 pagesActivity 2B Impedance of RL Circuits: Parallel RL Curcuits 2B.1 Program Outcomes (Pos) Addressed by The ActivityNicoNo ratings yet
- Ijrer PDFDocument12 pagesIjrer PDFLahcen EL IYSAOUYNo ratings yet
- Design and Implementation of Controlled Zeta Converter Power SupplyDocument8 pagesDesign and Implementation of Controlled Zeta Converter Power Supplyyarra tejaNo ratings yet
- Basics of Circuit Analysis: RC RLCDocument18 pagesBasics of Circuit Analysis: RC RLCdavissblaineNo ratings yet
- Paper Rama MMCDocument10 pagesPaper Rama MMCibraNo ratings yet
- About Wireless Charging of CarDocument14 pagesAbout Wireless Charging of CarYadhu KrishnanNo ratings yet
- EPRECDocument14 pagesEPRECNasir RehmanNo ratings yet
- Spice Models For Power ElectronicsDocument13 pagesSpice Models For Power ElectronicslaksologinNo ratings yet
- Transformer Windings' RLC Parameters Calculation and Lightning Impulse Voltage Distribution SimulationDocument4 pagesTransformer Windings' RLC Parameters Calculation and Lightning Impulse Voltage Distribution SimulationOscar PieruzziniNo ratings yet
- Dupont 2015Document6 pagesDupont 2015Santhosh H ANo ratings yet
- Hybrid Wireless Power Transfer: Xu Chen, Shengbao Yu Xiaobo YangDocument5 pagesHybrid Wireless Power Transfer: Xu Chen, Shengbao Yu Xiaobo YangSoumya NayakNo ratings yet
- Acer Vellfire x01 SchematicDocument139 pagesAcer Vellfire x01 Schematicjawad anwarNo ratings yet
- Degree ExercisesDocument3 pagesDegree ExercisesArjit Kapoor100% (1)
- An Association Between Rainy Days With Clinical Dengue Fever in Dhaka, Bangladesh: Findings From A Hospital Based StudyDocument9 pagesAn Association Between Rainy Days With Clinical Dengue Fever in Dhaka, Bangladesh: Findings From A Hospital Based StudymikhaelyosiaNo ratings yet
- English 12 Unit 1Document7 pagesEnglish 12 Unit 1Anonymous N6ccr9MVNo ratings yet
- IEE EIA Introduction and ProcessDocument27 pagesIEE EIA Introduction and ProcessHari PyakurelNo ratings yet
- Astm C 22C 22MDocument2 pagesAstm C 22C 22MProfessor Dr. Nabeel Al-Bayati-Consultant EngineerNo ratings yet
- An Analysis of Poverty in The Philippines 1Document27 pagesAn Analysis of Poverty in The Philippines 1MikaNo ratings yet
- Modeling of Noncatalytic Gas-Solid ReactionsDocument20 pagesModeling of Noncatalytic Gas-Solid ReactionsLuis PaletoNo ratings yet
- Critec Transient Discriminating MOVTEC: FeaturesDocument2 pagesCritec Transient Discriminating MOVTEC: Featuresphu pham quocNo ratings yet
- Martin Gwapo JheroDocument8 pagesMartin Gwapo Jherokent baboys19No ratings yet
- Digital Photography in OrthodonDocument48 pagesDigital Photography in OrthodonSrinivasan BoovaraghavanNo ratings yet
- Reading and LongevityDocument5 pagesReading and LongevityThomas MooreNo ratings yet
- SLB Lean Level 2 Module 19 TestDocument3 pagesSLB Lean Level 2 Module 19 TestEdiith CarvajalNo ratings yet
- Robert BurnsDocument4 pagesRobert BurnsMilana SavicNo ratings yet
- Dee Mandala InfoMemoDocument27 pagesDee Mandala InfoMemoSheetalkumarNo ratings yet
- How To Run A Grinding TestDocument6 pagesHow To Run A Grinding Testsealion72No ratings yet
- Supplemental Type Certificate: N UmberDocument2 pagesSupplemental Type Certificate: N UmberJuan C BalderasNo ratings yet
- Tetrasteel 800 BrochureDocument4 pagesTetrasteel 800 BrochurejcrandleNo ratings yet
- Kratos Pitch Deck PresentationDocument14 pagesKratos Pitch Deck PresentationCS-B Dhanya Lakshmi GNo ratings yet
- Classified Coordinate Geometry Further Maths ExercisesDocument24 pagesClassified Coordinate Geometry Further Maths ExercisesAbrar RahmanNo ratings yet
- Automated Sand Gravity Sand Filter SystemDocument58 pagesAutomated Sand Gravity Sand Filter SystemMichaelNo ratings yet
- Literature Review and Case StudyDocument4 pagesLiterature Review and Case StudyNimNo ratings yet
- Identifying, Understanding, and Analyzing: by Steven M. Rinaldi, James P. Peerenboom, and Terrence K. KellyDocument15 pagesIdentifying, Understanding, and Analyzing: by Steven M. Rinaldi, James P. Peerenboom, and Terrence K. KellySFC JGDNo ratings yet
- Assignment On: Course Title: Course Code: Section Submitted byDocument11 pagesAssignment On: Course Title: Course Code: Section Submitted byAl MozahidNo ratings yet