You might also like
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Chapter 2 - Lecture NotesDocument20 pagesChapter 2 - Lecture NotesJoel Tan Yi JieNo ratings yet
- Chapter 2 - Lecture SlidesDocument74 pagesChapter 2 - Lecture SlidesJoel Tan Yi JieNo ratings yet
- Spring 2012 Statistics 153 Lecture FiveDocument6 pagesSpring 2012 Statistics 153 Lecture FiveShubham GanvirNo ratings yet
- Handout 2Document130 pagesHandout 2KadirNo ratings yet
- l6 PDFDocument13 pagesl6 PDFdiyahNo ratings yet
- Linear System and BackgroundDocument24 pagesLinear System and BackgroundEdmilson_Q_FilhoNo ratings yet
- Stochastic Analysis in Finance IIDocument16 pagesStochastic Analysis in Finance IItrols sadNo ratings yet
- Math 13567Document10 pagesMath 13567afiabaloch6792No ratings yet
- Finite Differences Partial Differential EquationsDocument15 pagesFinite Differences Partial Differential EquationsJuanCarlos Arias SantanaNo ratings yet
- Econometric Toolkit For Studying Dynamic Models in Economics and FinanceDocument39 pagesEconometric Toolkit For Studying Dynamic Models in Economics and FinancerrrrrrrrNo ratings yet
- Fokker-Planck - and Langevin EquatDocument16 pagesFokker-Planck - and Langevin Equatmarkus.aureliusNo ratings yet
- Stationary Stochastic ProcessesDocument11 pagesStationary Stochastic ProcessesMinal ChalakhNo ratings yet
- Wavelet Notes: B. M. Kessler, G. L. Payne, W. N. Polyzou The University of Iowa Iowa City, IA, 52242 February 5, 2008Document86 pagesWavelet Notes: B. M. Kessler, G. L. Payne, W. N. Polyzou The University of Iowa Iowa City, IA, 52242 February 5, 2008Sari setia NingrumNo ratings yet
- A Brief Introduction To Stochastic Calculus: 1 Martingales, Brownian Motion and Quadratic VariationDocument7 pagesA Brief Introduction To Stochastic Calculus: 1 Martingales, Brownian Motion and Quadratic VariationyygorakindyyNo ratings yet
- Chapter 2 Stationarity, Spectral Theorem, Ergodic Theorem (Lecture On 01-07-2021) - STAT 243 - Stochastic ProcessDocument4 pagesChapter 2 Stationarity, Spectral Theorem, Ergodic Theorem (Lecture On 01-07-2021) - STAT 243 - Stochastic ProcessProf. Madya Dr. Umar Yusuf MadakiNo ratings yet
- Albanese LawiDocument6 pagesAlbanese LawiPrachurjo DuttaroyNo ratings yet
- Ordinary Least SquaresDocument38 pagesOrdinary Least SquaresNha NhaNo ratings yet
- Stochastic ProcessessDocument7 pagesStochastic ProcessessAlbert IngwaniNo ratings yet
- Methods For Applied Macroeconomics Research - ch1Document28 pagesMethods For Applied Macroeconomics Research - ch1endi75No ratings yet
- Quasi Maximum Likelihood - ApplicationsDocument17 pagesQuasi Maximum Likelihood - ApplicationsAnonymous tsTtieMHDNo ratings yet
- Hu - Time Series AnalysisDocument149 pagesHu - Time Series AnalysisMadMinarchNo ratings yet
- Contraction PDFDocument27 pagesContraction PDFMauriNo ratings yet
- Loss of Energy Concentration in Nonlinear Evolution Beam Equations (Journal of Nonlinear Science) (2017)Document39 pagesLoss of Energy Concentration in Nonlinear Evolution Beam Equations (Journal of Nonlinear Science) (2017)rxflexNo ratings yet
- State Space Models and The Kalman FilterDocument49 pagesState Space Models and The Kalman FilterMohammadNo ratings yet
- Transversality Conditions and Dynamic Economic BehaviorDocument8 pagesTransversality Conditions and Dynamic Economic BehaviorStevensNo ratings yet
- Some Mean Square Integral Inequalites Involving The Beta Function and Generalized Convex Stochatic ProcessesDocument10 pagesSome Mean Square Integral Inequalites Involving The Beta Function and Generalized Convex Stochatic ProcessesJORGE ELIECER HERNANDEZ HERNANDEZNo ratings yet
- Ito and Stratonovich Integrals in Stochastic Differential EquationsDocument18 pagesIto and Stratonovich Integrals in Stochastic Differential EquationsGoce AngelovskiNo ratings yet
- A Cointegation Demo Fetrics Chp4Document58 pagesA Cointegation Demo Fetrics Chp4aptenodyteNo ratings yet
- Ijdev10n1 06Document16 pagesIjdev10n1 06bhushanam kosuriNo ratings yet
- On The Use of Wavelets Packet Decomposition For Time Series PredictionDocument12 pagesOn The Use of Wavelets Packet Decomposition For Time Series PredictionPradeep SinglaNo ratings yet
- Fujii 2 PDFDocument17 pagesFujii 2 PDFKidNo ratings yet
- Dynamics and Differential EquationsDocument30 pagesDynamics and Differential EquationsHusseinali HusseinNo ratings yet
- Random Processes: Saravanan Vijayakumaran Sarva@ee - Iitb.ac - inDocument10 pagesRandom Processes: Saravanan Vijayakumaran Sarva@ee - Iitb.ac - inSonu kumarNo ratings yet
- Stochastic Processes 2Document11 pagesStochastic Processes 2Seham RaheelNo ratings yet
- A Tutorial of The Wavelet Transform: Chun-Lin, Liu February 23, 2010Document72 pagesA Tutorial of The Wavelet Transform: Chun-Lin, Liu February 23, 2010Husam Al-AmeenNo ratings yet
- An Introduction to Stochastic Unit Root ProcessesDocument32 pagesAn Introduction to Stochastic Unit Root Processessmazadamha sulaimanNo ratings yet
- Symmetry 13 01960 v2Document31 pagesSymmetry 13 01960 v2David Torres GutierrezNo ratings yet
- STATISTICAL MECHANICS OF BROWNIAN MOTIONDocument7 pagesSTATISTICAL MECHANICS OF BROWNIAN MOTIONPriyank BangarNo ratings yet
- Andersson Djehiche - AMO 2011Document16 pagesAndersson Djehiche - AMO 2011artemischen0606No ratings yet
- 08 Aos674Document30 pages08 Aos674siti hayatiNo ratings yet
- Numerical Solution of Stochastic Differential Equations in FinanceDocument22 pagesNumerical Solution of Stochastic Differential Equations in FinanceMarion KarloNo ratings yet
- Log-Linearizing Around The Steady State A Guide WiDocument19 pagesLog-Linearizing Around The Steady State A Guide WiLord Vilis LMNo ratings yet
- EEM 306 Introduction To Communications: Department of Electrical and Electronics Engineering Anadolu UniversityDocument22 pagesEEM 306 Introduction To Communications: Department of Electrical and Electronics Engineering Anadolu UniversityHaroonRashidNo ratings yet
- Week3 PDFDocument7 pagesWeek3 PDFRyan DavisNo ratings yet
- Station A RityDocument18 pagesStation A RityStiven RodriguezNo ratings yet
- 09 Fall Exam2Document2 pages09 Fall Exam2Mriganabh ChoudhuryNo ratings yet
- The Functional Central Limit Theorem and Testing For Time Varying ParametersDocument38 pagesThe Functional Central Limit Theorem and Testing For Time Varying ParameterskaurNo ratings yet
- LBSEconometricsPartIIpdf Time SeriesDocument246 pagesLBSEconometricsPartIIpdf Time SeriesZoloft Zithromax ProzacNo ratings yet
- Window Fourier and Wavelet Transforms. Properties and Applications of WaveletsDocument23 pagesWindow Fourier and Wavelet Transforms. Properties and Applications of WaveletsAnshul SharmaNo ratings yet
- Trend CycleDocument15 pagesTrend CycleGelssominaNo ratings yet
- 4 Linear Regression Models With Time Series DataDocument15 pages4 Linear Regression Models With Time Series DataAmera NajemNo ratings yet
- D. Iftimie Et Al - On The Large Time Behavior of Two-Dimensional Vortex DynamicsDocument10 pagesD. Iftimie Et Al - On The Large Time Behavior of Two-Dimensional Vortex DynamicsJuaxmawNo ratings yet
- Autoregressive Distributed Lag (ADL) Model by Yi-Yi ChenDocument3 pagesAutoregressive Distributed Lag (ADL) Model by Yi-Yi ChenJustin ColynNo ratings yet
- Smile Dynamics 3Document12 pagesSmile Dynamics 3broletmedownloaditNo ratings yet
- Linearization Stability Definitions Simulation in Matlab/SimulinkDocument39 pagesLinearization Stability Definitions Simulation in Matlab/SimulinkSachin ShendeNo ratings yet
- Perform Parallel Monte Carlo and Moment Methods for SDEsDocument82 pagesPerform Parallel Monte Carlo and Moment Methods for SDEspaessensNo ratings yet
- Existence Andglobal Stability of Traveling Curved Fronts in The Allen-Cahn EquationsDocument30 pagesExistence Andglobal Stability of Traveling Curved Fronts in The Allen-Cahn EquationsLuis FuentesNo ratings yet
- Rigid Body Physics SimulationDocument24 pagesRigid Body Physics SimulationOuter SpaceNo ratings yet
- Lecture 15 Open Econ LRDocument5 pagesLecture 15 Open Econ LRsmazadamha sulaimanNo ratings yet
- THE HISTORICAL DEVELOPMENT OF MODERN ISLAMIC BANKING-3 (Standard)Document18 pagesTHE HISTORICAL DEVELOPMENT OF MODERN ISLAMIC BANKING-3 (Standard)smazadamha sulaimanNo ratings yet
- African Journal of Business Management: Reviewers GuideDocument3 pagesAfrican Journal of Business Management: Reviewers Guidesmazadamha sulaimanNo ratings yet
- Historical Development of Islamic Banking in SE AsiaDocument20 pagesHistorical Development of Islamic Banking in SE Asiasmazadamha sulaimanNo ratings yet
- African Journal of Business Management: Reviewers GuideDocument3 pagesAfrican Journal of Business Management: Reviewers Guidesmazadamha sulaimanNo ratings yet
- Mundell-Fleming Model for Small Open EconomiesDocument5 pagesMundell-Fleming Model for Small Open Economiessmazadamha sulaimanNo ratings yet
- Lecture 13 MF ContinuedDocument5 pagesLecture 13 MF Continuedsmazadamha sulaimanNo ratings yet
- Lecture 14 Case Study ERM CollapseDocument6 pagesLecture 14 Case Study ERM Collapsesmazadamha sulaimanNo ratings yet
- Lecture 11 UnemploymentDocument4 pagesLecture 11 Unemploymentsmazadamha sulaimanNo ratings yet
- Real Business Cycle - Leading, Coincident and Lagging IndicesDocument13 pagesReal Business Cycle - Leading, Coincident and Lagging Indicessmazadamha sulaimanNo ratings yet
- Lecture 26 Macro Analysis PolicyDocument9 pagesLecture 26 Macro Analysis Policysmazadamha sulaimanNo ratings yet
- Lecture 25 Social SecurityDocument2 pagesLecture 25 Social Securitysmazadamha sulaimanNo ratings yet
- Lecture 22 Deficit Debt IDocument6 pagesLecture 22 Deficit Debt Ismazadamha sulaimanNo ratings yet
- Effects of the Deficit Lecture AnalyzedDocument3 pagesEffects of the Deficit Lecture Analyzedsmazadamha sulaimanNo ratings yet
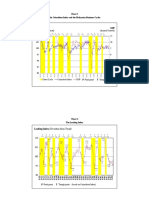
- Chart 3 The Coincident Index and The Malaysian Business CyclesDocument8 pagesChart 3 The Coincident Index and The Malaysian Business Cyclessmazadamha sulaimanNo ratings yet
- Lecture Thirty One: Measuring The Deficit (Economics 100b Spring 1996)Document6 pagesLecture Thirty One: Measuring The Deficit (Economics 100b Spring 1996)smazadamha sulaimanNo ratings yet
- Lecture 2 Money InflationDocument7 pagesLecture 2 Money Inflationsmazadamha sulaimanNo ratings yet
- Lecture16 Automatic StabilizerDocument5 pagesLecture16 Automatic Stabilizersmazadamha sulaimanNo ratings yet
- Lecture Three: Monetary Policy Real and Nominal Interest RatesDocument5 pagesLecture Three: Monetary Policy Real and Nominal Interest Ratessmazadamha sulaimanNo ratings yet
- Lecture 25 Social SecurityDocument2 pagesLecture 25 Social Securitysmazadamha sulaimanNo ratings yet
- Lecture17 Rules Vs DiscreationDocument5 pagesLecture17 Rules Vs Discreationsmazadamha sulaimanNo ratings yet
- Lecture Twenty Five: Long Run Growth I (Economics 100b Spring 1996)Document5 pagesLecture Twenty Five: Long Run Growth I (Economics 100b Spring 1996)smazadamha sulaimanNo ratings yet
- Lecture Thirty One: Measuring The Deficit (Economics 100b Spring 1996)Document6 pagesLecture Thirty One: Measuring The Deficit (Economics 100b Spring 1996)smazadamha sulaimanNo ratings yet
- Effects of the Deficit Lecture AnalyzedDocument3 pagesEffects of the Deficit Lecture Analyzedsmazadamha sulaimanNo ratings yet
- Lecture17 Rules Vs DiscreationDocument5 pagesLecture17 Rules Vs Discreationsmazadamha sulaimanNo ratings yet
- Lecture18 Term Structure Tobin QDocument5 pagesLecture18 Term Structure Tobin Qsmazadamha sulaimanNo ratings yet
- Lecture34 Macro Analysis PolicyDocument9 pagesLecture34 Macro Analysis Policysmazadamha sulaimanNo ratings yet
- Lecture14 Inflation Unemply Trade-OffDocument6 pagesLecture14 Inflation Unemply Trade-Offsmazadamha sulaimanNo ratings yet
- Lecture17 Rules Vs DiscreationDocument5 pagesLecture17 Rules Vs Discreationsmazadamha sulaimanNo ratings yet
- Lecture15 Macro Policy Rule-Vs-discreationDocument6 pagesLecture15 Macro Policy Rule-Vs-discreationsmazadamha sulaimanNo ratings yet
- KiaOptima Seccion 002Document7 pagesKiaOptima Seccion 002Luis Enrique PeñaNo ratings yet
- 3 6 17weekly Homework Sheet Week 23 - 5th Grade - CcssDocument3 pages3 6 17weekly Homework Sheet Week 23 - 5th Grade - Ccssapi-328344919No ratings yet
- Ac and DC MeasurementsDocument29 pagesAc and DC MeasurementsRudra ChauhanNo ratings yet
- Operation and Maint Manual Swill Hydraulic PlateformDocument16 pagesOperation and Maint Manual Swill Hydraulic Plateformmicell dieselNo ratings yet
- Dur - Ernakulam ReportDocument141 pagesDur - Ernakulam ReportArun SasiNo ratings yet
- Ett 531 Motion Visual AnalysisDocument4 pagesEtt 531 Motion Visual Analysisapi-266466498No ratings yet
- Characterization in Compound Semiconductor ProcessingDocument27 pagesCharacterization in Compound Semiconductor ProcessingMomentum PressNo ratings yet
- Vidya Mandir Public School Class 11 Computer Science String Assignment SolutionsDocument5 pagesVidya Mandir Public School Class 11 Computer Science String Assignment SolutionsArun SharmaNo ratings yet
- Automobiles Seat ComfortDocument10 pagesAutomobiles Seat ComfortAnushree DeshingeNo ratings yet
- Acdsee Pro 6 End User License AgreementDocument7 pagesAcdsee Pro 6 End User License AgreementJonathon MoranNo ratings yet
- Panasonic Sx-kc211 User ManualDocument36 pagesPanasonic Sx-kc211 User ManualJoshua Chong100% (1)
- Brain Size Evolution: How Fish Pay For Being Smart: Dispatch R63Document3 pagesBrain Size Evolution: How Fish Pay For Being Smart: Dispatch R63Nika AbashidzeNo ratings yet
- Cooler Catalogue PDFDocument12 pagesCooler Catalogue PDFCărunta-Crista CristinaNo ratings yet
- RD 5000 CalibracionDocument5 pagesRD 5000 Calibracionfran reyNo ratings yet
- Technical Report Writing For Ca2 ExaminationDocument6 pagesTechnical Report Writing For Ca2 ExaminationAishee DuttaNo ratings yet
- D Series: Instruction ManualDocument2 pagesD Series: Instruction ManualMartin del ValleNo ratings yet
- IAS Mains Electrical Engineering 1994Document10 pagesIAS Mains Electrical Engineering 1994rameshaarya99No ratings yet
- ERA News Mar 23 - Final - 0Document10 pagesERA News Mar 23 - Final - 0Băltoiu Son AlisaNo ratings yet
- ks20201 Sample Questions Psycholinguistics Module3Document6 pagesks20201 Sample Questions Psycholinguistics Module3Anurag TiwariNo ratings yet
- Howden PDFDocument24 pagesHowden PDFskb2550% (2)
- jrc122457 Dts Survey Deliverable Ver. 5.0-3Document46 pagesjrc122457 Dts Survey Deliverable Ver. 5.0-3Boris Van CyrulnikNo ratings yet
- PackMan ReportDocument41 pagesPackMan ReportPrakash SamshiNo ratings yet
- Cosmos Carl SaganDocument18 pagesCosmos Carl SaganRabia AbdullahNo ratings yet
- Hydro Distillation Method Extraction of Eucalyptus Oil Lemongrass OilDocument9 pagesHydro Distillation Method Extraction of Eucalyptus Oil Lemongrass OilSIVANESAN JOTHIVELNo ratings yet
- Overview of Common Communication Challenges and TipsDocument7 pagesOverview of Common Communication Challenges and TipsTinyEYE Therapy ServicesNo ratings yet
- BIGuidebook Templates - BI Logical Data Model - Data Integration DesignDocument12 pagesBIGuidebook Templates - BI Logical Data Model - Data Integration DesignShahina H CrowneNo ratings yet
- Resume summary of monthly sparepart costs and production in 2021Document590 pagesResume summary of monthly sparepart costs and production in 2021winda listya ningrumNo ratings yet
- 07 FSM PDFDocument25 pages07 FSM PDFnew2trackNo ratings yet
- Daily DAWN News Vocabulary With Urdu Meaning (05 April 2020) PDFDocument6 pagesDaily DAWN News Vocabulary With Urdu Meaning (05 April 2020) PDFAEO Begowala100% (2)
- 5 - Architect Fee AgreementDocument4 pages5 - Architect Fee AgreementJoevince Neil Gacus100% (2)