You might also like
- Matlab Project - Quarter Vehicle: Name: Sebastian Preil Student ID: 1256334 Winter Semester 2015/16Document29 pagesMatlab Project - Quarter Vehicle: Name: Sebastian Preil Student ID: 1256334 Winter Semester 2015/16RezaNo ratings yet
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet
- SE 514 OPTIMAL CONTROL FOR SINGLE AND DOUBLE INVERTED PENDULUM Project ReportDocument36 pagesSE 514 OPTIMAL CONTROL FOR SINGLE AND DOUBLE INVERTED PENDULUM Project ReportDragan ErcegNo ratings yet
- Appunti pg8 1 PDFDocument86 pagesAppunti pg8 1 PDFAndres Auza100% (1)
- 2009 - Todorov, Dobrev, Massouh - Analysis of Torsional Oscillation of The Drive Train in Horizontal-Axis Wind TurbineDocument7 pages2009 - Todorov, Dobrev, Massouh - Analysis of Torsional Oscillation of The Drive Train in Horizontal-Axis Wind TurbineLivrosScrNo ratings yet
- Graphs with MATLAB (Taken from "MATLAB for Beginners: A Gentle Approach")From EverandGraphs with MATLAB (Taken from "MATLAB for Beginners: A Gentle Approach")Rating: 4 out of 5 stars4/5 (2)
- System Simulation Using Matlab, State Plane PlotsDocument7 pagesSystem Simulation Using Matlab, State Plane PlotsmosictrlNo ratings yet
- Dq0 Transform - Open ElectricalDocument5 pagesDq0 Transform - Open ElectricalHerman DamanikNo ratings yet
- Javakuka: Create KUKA Robot Language (KRL) Codes With JavaDocument28 pagesJavakuka: Create KUKA Robot Language (KRL) Codes With JavaSergei KublanovNo ratings yet
- Selby Trapp Final ReportDocument28 pagesSelby Trapp Final ReportothmanNo ratings yet
- Controlling An Inverted Pendulum Using S PDFDocument34 pagesControlling An Inverted Pendulum Using S PDFMiguel Angel ArruaNo ratings yet
- 3 Inverted Pendulum ProjectDocument26 pages3 Inverted Pendulum ProjectJoshua D JohnNo ratings yet
- 9 The Grid Element: Basic EquationsDocument2 pages9 The Grid Element: Basic EquationsRizeruNo ratings yet
- Lab ExcerciseDocument5 pagesLab ExcerciseWeldush BrightNo ratings yet
- J. Chang et al. / ISA Transactions 71 (2017) 495–512Document4 pagesJ. Chang et al. / ISA Transactions 71 (2017) 495–512Yessica RosasNo ratings yet
- LagrangianDocument45 pagesLagrangianReyner LozaNo ratings yet
- Mathematical Modeling of Different SystemsDocument20 pagesMathematical Modeling of Different SystemsMD MUSFIQUR RAHMANNo ratings yet
- Robot Control Kelly 2005-1Document13 pagesRobot Control Kelly 2005-1Gabriel Gálvez MendozaNo ratings yet
- Quantum Computing For Computer Scientists (PDFDrive - Com) (092-120)Document29 pagesQuantum Computing For Computer Scientists (PDFDrive - Com) (092-120)Johann Steven BogotàNo ratings yet
- Rotary Inverted Pendulum: ME 452 Course Project IIDocument25 pagesRotary Inverted Pendulum: ME 452 Course Project IIMohammed BenbrahimNo ratings yet
- MPC Controller Design For Autonomous Vehicle Lane ChangingDocument15 pagesMPC Controller Design For Autonomous Vehicle Lane ChangingMahdi AnsariNo ratings yet
- Suspension SystemDocument8 pagesSuspension SystemAbqori AulaNo ratings yet
- Analytic Design Evaluation of Induction MachinesDocument43 pagesAnalytic Design Evaluation of Induction MachinesAli HashemiNo ratings yet
- StrainDocument42 pagesStrainHakim FahmiNo ratings yet
- Study of Rotor-Bearing Systems Using Campbell DiagramDocument4 pagesStudy of Rotor-Bearing Systems Using Campbell DiagrammishraenggNo ratings yet
- Matrix Operations and Linear Algebra ExercisesDocument5 pagesMatrix Operations and Linear Algebra ExercisesAnis HarrabiNo ratings yet
- Simulation of Inverted Pendulum Using Neural Networks For IdentificationDocument7 pagesSimulation of Inverted Pendulum Using Neural Networks For IdentificationYeshitila HailuNo ratings yet
- CS State Variable TDocument21 pagesCS State Variable TPrasun SinghalNo ratings yet
- Cubic Spline TutorialDocument4 pagesCubic Spline TutorialMichael MOuireNo ratings yet
- Vibration of Two Degree of Freedom SystemDocument23 pagesVibration of Two Degree of Freedom SystemDewa Ayu Mery AgustinNo ratings yet
- ProblemsDocument8 pagesProblemsadnan mehmoodNo ratings yet
- Transformation Matrices Geometric and OtherwiseDocument11 pagesTransformation Matrices Geometric and Otherwisesmiling personNo ratings yet
- Inverted Pendulum ProjectDocument10 pagesInverted Pendulum Projectjulien dahrNo ratings yet
- Kinematics AnalysisDocument19 pagesKinematics AnalysissathishjeyNo ratings yet
- A Neural Network Combined With Sliding Mode Controller For The Two-Wheel Self-Balancing RobotDocument10 pagesA Neural Network Combined With Sliding Mode Controller For The Two-Wheel Self-Balancing RobotIAES IJAINo ratings yet
- Placa 1-2-5: Cálculo de reacciones y deformaciónDocument14 pagesPlaca 1-2-5: Cálculo de reacciones y deformaciónFabio Haziel Rocha TapiaNo ratings yet
- Disctrete Time Feedback Linearization Method For Dynamical Adaptive Control of Electronic ThrottleDocument5 pagesDisctrete Time Feedback Linearization Method For Dynamical Adaptive Control of Electronic ThrottleBodoShowNo ratings yet
- Single Axis Text I J Mic 08075 FinalDocument26 pagesSingle Axis Text I J Mic 08075 Finalali almorsedNo ratings yet
- Coupled DrivesDocument17 pagesCoupled DrivesFouad TachiNo ratings yet
- Aquickintroductiontoslidingmodecontrol PDFDocument22 pagesAquickintroductiontoslidingmodecontrol PDFKamaleshNo ratings yet
- Natural Freq and Modal ShapesDocument5 pagesNatural Freq and Modal ShapesHelen HerodicoNo ratings yet
- Microwave Engineering - Microwave Devices PDFDocument7 pagesMicrowave Engineering - Microwave Devices PDFHero RameshNo ratings yet
- 7 PDFDocument22 pages7 PDFAli AldesogeNo ratings yet
- Optimal Control Based LQR-feedback Linearisation For Magnetic Levitation Using Improved Spiral Dynamic AlgorithmDocument5 pagesOptimal Control Based LQR-feedback Linearisation For Magnetic Levitation Using Improved Spiral Dynamic AlgorithmElmer Mamani PretelNo ratings yet
- Islamic University of Technology (Iut) Organisation of Islamic Cooperation (Oic)Document2 pagesIslamic University of Technology (Iut) Organisation of Islamic Cooperation (Oic)hamNo ratings yet
- Three-Dimensional Analysis of Anisotropic Elastic Plates: Yoshitaka SuetakeDocument9 pagesThree-Dimensional Analysis of Anisotropic Elastic Plates: Yoshitaka SuetakeHarsha HarNo ratings yet
- 3 Finite-State Machines: 3.1 IntuitionDocument24 pages3 Finite-State Machines: 3.1 IntuitionJess ZNo ratings yet
- 2.003 Engineering Dynamics Problem Set 11: K K L L I MR M R I K I K GJ GJDocument6 pages2.003 Engineering Dynamics Problem Set 11: K K L L I MR M R I K I K GJ GJlrodriguez_892566No ratings yet
- Robotics-I Assignment 2022-23 Erasmus 1Document2 pagesRobotics-I Assignment 2022-23 Erasmus 1Victoria BenítezNo ratings yet
- Turbulence Modeling: A Discussion On Different Techniques Used in Turbulence ModelingDocument19 pagesTurbulence Modeling: A Discussion On Different Techniques Used in Turbulence ModelingSreedhar BabuNo ratings yet
- OmniRoller Holonomic Drive TutorialDocument11 pagesOmniRoller Holonomic Drive TutorialYoussef AbbasNo ratings yet
- CCE 2018 Paper 33Document6 pagesCCE 2018 Paper 33JLuis LuNaNo ratings yet
- Observer-Based ControlDocument6 pagesObserver-Based ControlKadir CumaliNo ratings yet
- Tut 5Document4 pagesTut 5Aakriti VermaNo ratings yet
- Quadcopters Full Quaternions BackStepping ControlDocument4 pagesQuadcopters Full Quaternions BackStepping ControlGiulio AlbertinottiNo ratings yet
- Mathematical Model of DC Motor For Analysis of Commutation ProcessesDocument4 pagesMathematical Model of DC Motor For Analysis of Commutation ProcessesMadarwi SarwaNo ratings yet
- Chapter 4Document100 pagesChapter 4khgvouy hvogyflNo ratings yet
- MS AccessDocument34 pagesMS AccessRovin Garcia0% (1)
- Jee 2024Document7 pagesJee 2024Sangeeta YadavNo ratings yet
- IBPS RRB Clerk Prelims Mock Test PDF - (English Version) : Numerical AbilityDocument23 pagesIBPS RRB Clerk Prelims Mock Test PDF - (English Version) : Numerical AbilitySajal MalNo ratings yet
- Service (Repair) Manual For Panasonic SA-BT100PDocument174 pagesService (Repair) Manual For Panasonic SA-BT100PDan Guertin50% (2)
- SK Product HandbookDocument110 pagesSK Product Handbooksupriyo110No ratings yet
- Bsme 1 3 G1 E3Document12 pagesBsme 1 3 G1 E3Daniel ParungaoNo ratings yet
- Apex Basic Program For PracticeDocument7 pagesApex Basic Program For PracticeKRUNAL RAJURKARNo ratings yet
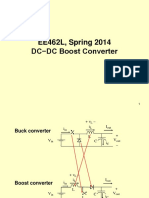
- DC DC Boost ConverterDocument21 pagesDC DC Boost Converterrokbraihan2No ratings yet
- Tyre Curing GuideDocument6 pagesTyre Curing GuideMALAY GUPTANo ratings yet
- Manual de Servicio 66DX35G1IDocument8 pagesManual de Servicio 66DX35G1IcesarNo ratings yet
- PV776-20 003739Document0 pagesPV776-20 003739Registr Registr100% (1)
- UsxrefDocument57 pagesUsxrefgmawoyoNo ratings yet
- Lab3b NewDocument12 pagesLab3b NewChidiebere KaluNo ratings yet
- Fundamentals of GIS: March 2018Document81 pagesFundamentals of GIS: March 2018Anashuwa ChowdhuryNo ratings yet
- 3d AutoCad Test 11 (06-03-2020)Document9 pages3d AutoCad Test 11 (06-03-2020)nadirNo ratings yet
- Proselect Psts21np and Psts11np Installation ManualDocument1 pageProselect Psts21np and Psts11np Installation ManualRyan Murray33% (6)
- Calculus and Analytical GeometryDocument8 pagesCalculus and Analytical Geometrynep llNo ratings yet
- Java Project Final-3Document39 pagesJava Project Final-3Shubham PradhanNo ratings yet
- Site Visit Form RF Antenna AdjustmentDocument8 pagesSite Visit Form RF Antenna AdjustmentazfahaidarNo ratings yet
- Forming Project ManualDocument4 pagesForming Project ManualNikos VaxevanidisNo ratings yet
- LipidsDocument2 pagesLipidsKier Daniel BorromeoNo ratings yet
- Report of Training ON Arduino Platform and C ProgrammingDocument12 pagesReport of Training ON Arduino Platform and C Programmingraman Mehta100% (1)
- Scooptram ST 1520 PDFDocument3 pagesScooptram ST 1520 PDFmarcos abalNo ratings yet
- Schematic Learning Definition of Term Technique: Basic Terms General DefinitionsDocument8 pagesSchematic Learning Definition of Term Technique: Basic Terms General DefinitionsKifaru Micro-electronics100% (1)
- Chapter 3 Kinematics in Two Dimensions VectorsDocument18 pagesChapter 3 Kinematics in Two Dimensions VectorsShaquille AbhistaNo ratings yet
- Part #Description Quantity TotalDocument2 pagesPart #Description Quantity TotalsergioNo ratings yet
- Microsoft Word: The Most Popular Word ProcessorDocument93 pagesMicrosoft Word: The Most Popular Word ProcessorNirmal KambojNo ratings yet
- Test Your Preparation For NEET 2021: Anand PrakashDocument40 pagesTest Your Preparation For NEET 2021: Anand PrakashAnimesh MjNo ratings yet
- Simulating Unit Operations with HYSYSDocument5 pagesSimulating Unit Operations with HYSYSĐậu Bắp50% (2)
- Functional Safety from Scratch: A Practical Guide to Process Industry ApplicationsFrom EverandFunctional Safety from Scratch: A Practical Guide to Process Industry ApplicationsNo ratings yet
- The ISO 45001:2018 Implementation Handbook: Guidance on Building an Occupational Health and Safety Management SystemFrom EverandThe ISO 45001:2018 Implementation Handbook: Guidance on Building an Occupational Health and Safety Management SystemNo ratings yet
- Introduction to Petroleum Process SafetyFrom EverandIntroduction to Petroleum Process SafetyRating: 3 out of 5 stars3/5 (2)
- A Poison Like No Other: How Microplastics Corrupted Our Planet and Our BodiesFrom EverandA Poison Like No Other: How Microplastics Corrupted Our Planet and Our BodiesRating: 5 out of 5 stars5/5 (1)
- Trevor Kletz Compendium: His Process Safety Wisdom Updated for a New GenerationFrom EverandTrevor Kletz Compendium: His Process Safety Wisdom Updated for a New GenerationNo ratings yet
- A Complete Guide to Safety Officer Interview Questions and AnswersFrom EverandA Complete Guide to Safety Officer Interview Questions and AnswersRating: 4 out of 5 stars4/5 (1)
- Guidelines for Initiating Events and Independent Protection Layers in Layer of Protection AnalysisFrom EverandGuidelines for Initiating Events and Independent Protection Layers in Layer of Protection AnalysisRating: 5 out of 5 stars5/5 (1)
- Rules of Thumb for Maintenance and Reliability EngineersFrom EverandRules of Thumb for Maintenance and Reliability EngineersRating: 4.5 out of 5 stars4.5/5 (12)
- Safety Fundamentals and Best Practices in Construction IndustryFrom EverandSafety Fundamentals and Best Practices in Construction IndustryNo ratings yet
- Nutritional and Therapeutic Interventions for Diabetes and Metabolic SyndromeFrom EverandNutritional and Therapeutic Interventions for Diabetes and Metabolic SyndromeNo ratings yet
- Incidents That Define Process SafetyFrom EverandIncidents That Define Process SafetyNo ratings yet
- Safety and Intelligent Transport Systems Development in the People’s Republic of ChinaFrom EverandSafety and Intelligent Transport Systems Development in the People’s Republic of ChinaNo ratings yet
- Practical Industrial Safety, Risk Assessment and Shutdown SystemsFrom EverandPractical Industrial Safety, Risk Assessment and Shutdown SystemsRating: 4 out of 5 stars4/5 (11)
- Guidelines for Auditing Process Safety Management SystemsFrom EverandGuidelines for Auditing Process Safety Management SystemsNo ratings yet
- Autophagy in Health and DiseaseFrom EverandAutophagy in Health and DiseaseBeverly RothermelNo ratings yet
- Guidelines for Implementing Process Safety ManagementFrom EverandGuidelines for Implementing Process Safety ManagementNo ratings yet
- Radium Girls: Women and Industrial Health Reform, 1910-1935From EverandRadium Girls: Women and Industrial Health Reform, 1910-1935Rating: 4.5 out of 5 stars4.5/5 (4)
- 3D Printing of Concrete: State of the Art and Challenges of the Digital Construction RevolutionFrom Everand3D Printing of Concrete: State of the Art and Challenges of the Digital Construction RevolutionArnaud PerrotNo ratings yet
- Exercise, Sport, and Bioanalytical Chemistry: Principles and PracticeFrom EverandExercise, Sport, and Bioanalytical Chemistry: Principles and PracticeNo ratings yet
- The Invisible Rainbow: A History of Electricity and LifeFrom EverandThe Invisible Rainbow: A History of Electricity and LifeRating: 4.5 out of 5 stars4.5/5 (21)
- One Health: Integrated Approach to 21st Century Challenges to HealthFrom EverandOne Health: Integrated Approach to 21st Century Challenges to HealthJoana C. PrataNo ratings yet
- Safety Critical Systems Handbook: A Straight forward Guide to Functional Safety, IEC 61508 (2010 EDITION) and Related Standards, Including Process IEC 61511 and Machinery IEC 62061 and ISO 13849From EverandSafety Critical Systems Handbook: A Straight forward Guide to Functional Safety, IEC 61508 (2010 EDITION) and Related Standards, Including Process IEC 61511 and Machinery IEC 62061 and ISO 13849Rating: 4 out of 5 stars4/5 (5)
- Handbook of Fire and Explosion Protection Engineering Principles: for Oil, Gas, Chemical and Related FacilitiesFrom EverandHandbook of Fire and Explosion Protection Engineering Principles: for Oil, Gas, Chemical and Related FacilitiesRating: 4.5 out of 5 stars4.5/5 (2)
- The Construction Safety Guide: Injury and Illness Prevention through DesignFrom EverandThe Construction Safety Guide: Injury and Illness Prevention through DesignRating: 4 out of 5 stars4/5 (6)