You might also like
- Automated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsFrom EverandAutomated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsNo ratings yet
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Control of A PMSG Based Wind Energy Generation SysDocument11 pagesControl of A PMSG Based Wind Energy Generation SysMahdi HERMASSINo ratings yet
- Grid Integration of PMSG Based Wind Energy Conversion With Battery Storage SystemDocument10 pagesGrid Integration of PMSG Based Wind Energy Conversion With Battery Storage SystemRahul KumarNo ratings yet
- Content ServerDocument18 pagesContent Serverayoub reseauNo ratings yet
- Control of Grid Side Converter in Wind Power Based PMSG With PLL MethodDocument10 pagesControl of Grid Side Converter in Wind Power Based PMSG With PLL MethodItran AzalNo ratings yet
- Performance Study of Grid Connected PMSG Based Wind Turbine SystemDocument4 pagesPerformance Study of Grid Connected PMSG Based Wind Turbine SystemDjedidi Med RiadhNo ratings yet
- Introdução VariaçãoDocument6 pagesIntrodução VariaçãoTravis GrayNo ratings yet
- Optimal Location and Reactive Power Injection of WDocument8 pagesOptimal Location and Reactive Power Injection of WAzuan Abdul RazakNo ratings yet
- Ieee 5Document10 pagesIeee 5Thiaga RajanNo ratings yet
- A MPPT Strategy Based On Cuckoo Search For Wind enDocument6 pagesA MPPT Strategy Based On Cuckoo Search For Wind enbensumbbNo ratings yet
- Assessment of Flicker Emission in A Grid Connected Wind FarmsDocument12 pagesAssessment of Flicker Emission in A Grid Connected Wind FarmspetraschukmNo ratings yet
- Simulation Model of A Permanent Magnet Synchronous Generator For Grid StudiesDocument6 pagesSimulation Model of A Permanent Magnet Synchronous Generator For Grid StudiesRupesh Arun KumarNo ratings yet
- Research Article: Modelling of A PMSG Wind Turbine With Autonomous ControlDocument10 pagesResearch Article: Modelling of A PMSG Wind Turbine With Autonomous ControlHoa NguyenNo ratings yet
- Volume8Issue4493 507Document16 pagesVolume8Issue4493 507Mark FordNo ratings yet
- Control Strategy For HVDC Interconnected DC-based Offshore Wind FarmDocument6 pagesControl Strategy For HVDC Interconnected DC-based Offshore Wind FarmTruong HoaNo ratings yet
- IJETR031160Document5 pagesIJETR031160erpublicationNo ratings yet
- Ordered Synopsis CenthilDocument14 pagesOrdered Synopsis CenthilageesNo ratings yet
- Venkata Yaramasu, Student Member, IEEE, Bin Wu, Fellow, IEEE, Marco Rivera, Member, IEEE, and Jose Rodriguez, Fellow, IEEEDocument11 pagesVenkata Yaramasu, Student Member, IEEE, Bin Wu, Fellow, IEEE, Marco Rivera, Member, IEEE, and Jose Rodriguez, Fellow, IEEEchikha saidNo ratings yet
- ARTICULO de AerogeneradorDocument9 pagesARTICULO de AerogeneradorNelson Rafael Vicent RuedaNo ratings yet
- 510 TorresDocument6 pages510 TorresnavidelecNo ratings yet
- 1 s2.0 S1876610213017268 Main PDFDocument10 pages1 s2.0 S1876610213017268 Main PDFMaroju Santosh KiranNo ratings yet
- Watts 3 w AU p ρC 2 1 m PDocument7 pagesWatts 3 w AU p ρC 2 1 m PAbhishek SinghNo ratings yet
- EEE 1201 021 Doubly Fed Induction Wind Turbines PSCAD EMTDCDocument6 pagesEEE 1201 021 Doubly Fed Induction Wind Turbines PSCAD EMTDCShruthi SaNo ratings yet
- Volume (8) Issue (4) 493-507Document15 pagesVolume (8) Issue (4) 493-507Seid BegovicNo ratings yet
- Modelling, Operation and Control of HVDC Connected Oshore Wind FarmsDocument26 pagesModelling, Operation and Control of HVDC Connected Oshore Wind FarmsMohammed Shareef ShaikhNo ratings yet
- PSCAD Based Dynamic ModelingDocument7 pagesPSCAD Based Dynamic ModelingLalith KrishnanNo ratings yet
- Performance Analysis of Wind Turbine-Driven Permanent Magnet Generator With Matrix ConverterDocument19 pagesPerformance Analysis of Wind Turbine-Driven Permanent Magnet Generator With Matrix ConverterRahul KumarNo ratings yet
- High-Efficiency Control For A Wind Energy Conversion System With Induction GeneratorDocument10 pagesHigh-Efficiency Control For A Wind Energy Conversion System With Induction GeneratorKIREETINo ratings yet
- 1 PBDocument10 pages1 PBaasfklNo ratings yet
- Modeling and Simulation PMSG Based On Wind Energy Conversion System in MATLAB/SIMULINKDocument5 pagesModeling and Simulation PMSG Based On Wind Energy Conversion System in MATLAB/SIMULINKRITWIK MALNo ratings yet
- INDEL 2020 Paper 10Document6 pagesINDEL 2020 Paper 10Michael LoupisNo ratings yet
- J. of Mechanics Engineering and Automation 7 (2017) 171-179Document9 pagesJ. of Mechanics Engineering and Automation 7 (2017) 171-179Sơn PhạmNo ratings yet
- Modeling and Control of Direct Drive Variable Speed Stand-Alone Wind Energy Conversion SystemsDocument6 pagesModeling and Control of Direct Drive Variable Speed Stand-Alone Wind Energy Conversion SystemsSamundra GurungNo ratings yet
- Matlab Simulink As Simulation Tool For Wind Generation Systems Based On Doubly Fed Induction MachinesDocument22 pagesMatlab Simulink As Simulation Tool For Wind Generation Systems Based On Doubly Fed Induction MachinesAchraf BourassNo ratings yet
- One-Power-Point Operation For Variable Speed Wind/ Tidal Stream Turbines With Synchronous GeneratorsDocument10 pagesOne-Power-Point Operation For Variable Speed Wind/ Tidal Stream Turbines With Synchronous GeneratorsHuibin ZhangNo ratings yet
- Analysis of Safe Integration Criteria For Wind Power With Induction Generators Based Wind TurbinesDocument8 pagesAnalysis of Safe Integration Criteria For Wind Power With Induction Generators Based Wind TurbinesthefacelessgangsterNo ratings yet
- IEEEDocument9 pagesIEEESagiraju DileepNo ratings yet
- IET Renewable Power Gen - 2013 - Lei - Doubly Fed Induction Generator Wind Turbine Modelling For Detailed ElectromagneticDocument10 pagesIET Renewable Power Gen - 2013 - Lei - Doubly Fed Induction Generator Wind Turbine Modelling For Detailed ElectromagneticSuba ShiniNo ratings yet
- Power Maximization Control of Small Wind System Using Permanent Magnet Synchronous GeneratorDocument13 pagesPower Maximization Control of Small Wind System Using Permanent Magnet Synchronous GeneratorhassenbbNo ratings yet
- Jjmie: Modeling and Optimization of Wind Turbine Driving Permanent Magnet Synchronous GeneratorDocument6 pagesJjmie: Modeling and Optimization of Wind Turbine Driving Permanent Magnet Synchronous GeneratorhassenbbNo ratings yet
- A Decoupled Control Strategy of PMSG For Variable Speed Wind Power ApplicationDocument6 pagesA Decoupled Control Strategy of PMSG For Variable Speed Wind Power ApplicationHarish S KiranNo ratings yet
- Malah Et Al. - 2020 - Backstepping Controllers Design For A Grid Connected Wind-Photovoltaic Hybrid Power System-AnnotatedDocument6 pagesMalah Et Al. - 2020 - Backstepping Controllers Design For A Grid Connected Wind-Photovoltaic Hybrid Power System-AnnotatedMohamed Riyad BoudallaaNo ratings yet
- Nonlinear Wind Turbine Control Under Wind Speed Variation and Voltage DipsDocument1 pageNonlinear Wind Turbine Control Under Wind Speed Variation and Voltage DipsabdelhakNo ratings yet
- Modeling and Control of PMSG Based Variable Speed Wind Turbine 2010 Electric Power Systems ResearchDocument7 pagesModeling and Control of PMSG Based Variable Speed Wind Turbine 2010 Electric Power Systems ResearchRAJESHNo ratings yet
- Power Balancing Control For AC/DC MicrogridDocument8 pagesPower Balancing Control For AC/DC MicrogridInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- New Control Strategies of A Small Size Wind Generation System For Battery ChargingDocument6 pagesNew Control Strategies of A Small Size Wind Generation System For Battery ChargingZellagui EnergyNo ratings yet
- Simulation of Low Voltage Ride Through Capability of Wind Turbines With Doubly Fed Induction GeneratorDocument9 pagesSimulation of Low Voltage Ride Through Capability of Wind Turbines With Doubly Fed Induction GeneratorDanny LiNo ratings yet
- MPPT Control Methods in Wind Energy Conversion Systems PDFDocument23 pagesMPPT Control Methods in Wind Energy Conversion Systems PDFHani M. El-TouniNo ratings yet
- Modeling and Simulation of Dfig To Grid Connected Wind Power Generation Using MatlabDocument12 pagesModeling and Simulation of Dfig To Grid Connected Wind Power Generation Using MatlabIAEME PublicationNo ratings yet
- ElectricalDocument15 pagesElectricalVictor RamonNo ratings yet
- Modeling of Type 4 Wind Turbine Generators - UVIG Modeling WikiDocument11 pagesModeling of Type 4 Wind Turbine Generators - UVIG Modeling WikielchicogrisNo ratings yet
- Journal Européen Des Systèmes Automatisés: Received: 25 July 2020 Accepted: 8 October 2020Document10 pagesJournal Européen Des Systèmes Automatisés: Received: 25 July 2020 Accepted: 8 October 2020Souf Hack-digitalNo ratings yet
- A New Method of Maximum Power Point Tracking For DFIG Based Wind TurbineDocument7 pagesA New Method of Maximum Power Point Tracking For DFIG Based Wind Turbinebalaji06202No ratings yet
- Electrical Power and Energy Systems: S. Abdeddaim, A. BetkaDocument9 pagesElectrical Power and Energy Systems: S. Abdeddaim, A. BetkaAghiles ArdjalNo ratings yet
- Harmonic Mitigation in Doubly Fed Induction Generator For Wind Conversion Systems by Using Integrated Active Filter CapabilitiesDocument8 pagesHarmonic Mitigation in Doubly Fed Induction Generator For Wind Conversion Systems by Using Integrated Active Filter CapabilitiesijcctsNo ratings yet
- Beltran 2012Document9 pagesBeltran 2012hamza gaNo ratings yet
- Offshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsFrom EverandOffshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Control of A PMSG Based Wind Energy Generation System For Power Maximization and Grid Fault ConditionsDocument10 pagesControl of A PMSG Based Wind Energy Generation System For Power Maximization and Grid Fault ConditionsHieu VuNo ratings yet
- Advanced Multilevel Converter Applied To An Open-Ends Induction MachineDocument8 pagesAdvanced Multilevel Converter Applied To An Open-Ends Induction MachineHieu VuNo ratings yet
- Open-End-Winding PMSG For Wind Energy Conversion System With Dual Boost NPC ConverterDocument6 pagesOpen-End-Winding PMSG For Wind Energy Conversion System With Dual Boost NPC ConverterHieu VuNo ratings yet
- Harnessing and Modeling Wind Power Plant With Permanent Magnet Synchronous Generator For Power Generation in NigeriaDocument18 pagesHarnessing and Modeling Wind Power Plant With Permanent Magnet Synchronous Generator For Power Generation in NigeriaHieu VuNo ratings yet
- A Novel Space-Vector PWM Computations For A Dual Three-Level T-Type Converter Applied To An Open End-Winding Induction MachineDocument6 pagesA Novel Space-Vector PWM Computations For A Dual Three-Level T-Type Converter Applied To An Open End-Winding Induction MachineHieu VuNo ratings yet
- Shoaib Thesis Final VersionDocument43 pagesShoaib Thesis Final Versionshoaib arshadNo ratings yet
- 2023-306 Winter Storm Elliott After-Action Public Report-FNL2Document15 pages2023-306 Winter Storm Elliott After-Action Public Report-FNL2Dan Lehr100% (1)
- Interconnection of Power SystemsDocument5 pagesInterconnection of Power SystemsRohan Sharma50% (2)
- EG2200 Power Generation Operation and Planning - L5: Lennart Söder Professor in Electric Power SystemsDocument14 pagesEG2200 Power Generation Operation and Planning - L5: Lennart Söder Professor in Electric Power SystemsMansoor Ali p177508No ratings yet
- SPARK STAR-41 Failure of Metering UnitDocument1 pageSPARK STAR-41 Failure of Metering UnitChanna BasavarajNo ratings yet
- FORMATs of Technical Data For Connectivity AgreementDocument313 pagesFORMATs of Technical Data For Connectivity AgreementUdaya KakaraNo ratings yet
- ABB India Annual Report 2006Document70 pagesABB India Annual Report 2006Anupama VmNo ratings yet
- National Electricity Policy 2021Document20 pagesNational Electricity Policy 2021Momina TajNo ratings yet
- Pacific Gas and Electric Company: ProgramDocument140 pagesPacific Gas and Electric Company: ProgramzsakosNo ratings yet
- Solid q50 Denind 1808 V11webDocument2 pagesSolid q50 Denind 1808 V11webNinditya NugrohoNo ratings yet
- PMSG Wind Turbine ThesisDocument6 pagesPMSG Wind Turbine Thesisaflpbpcnhjpwkd100% (1)
- ALG Energy Case StudyDocument9 pagesALG Energy Case StudyThy NguyễnNo ratings yet
- Power Quality Monitoring and Classification: Sjef CobbenDocument26 pagesPower Quality Monitoring and Classification: Sjef CobbenManivannanNo ratings yet
- Shoreline Energy ProfileDocument21 pagesShoreline Energy ProfileEddy DombrayeNo ratings yet
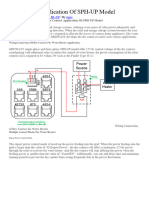
- Dry Contact Application of SPHDocument4 pagesDry Contact Application of SPHLadislav BreckaNo ratings yet
- Kehua Product LineDocument20 pagesKehua Product LineArslan ShafqatNo ratings yet
- Simple. Smart. Strong.: Blueplanet 125 TL3 Data SheetDocument2 pagesSimple. Smart. Strong.: Blueplanet 125 TL3 Data SheetprekNo ratings yet
- CII New Age Power SystemsDocument56 pagesCII New Age Power Systemssanjeevpnd439No ratings yet
- Voltage Source Inverter - Grid - TexasDocument50 pagesVoltage Source Inverter - Grid - TexasirfanNo ratings yet
- Assessment of Solar and Wind Resource Synergy in AustraliaDocument14 pagesAssessment of Solar and Wind Resource Synergy in AustraliaEbub eNo ratings yet
- Alstom Grid Brochure ENGDocument6 pagesAlstom Grid Brochure ENGMalavika GhoshNo ratings yet
- DSM Regulations Npti Webinar FinalDocument48 pagesDSM Regulations Npti Webinar FinalGouravNo ratings yet
- Silo - Tips - PRDC Power Research Development Consultants PVT LTDDocument12 pagesSilo - Tips - PRDC Power Research Development Consultants PVT LTDASHISH MISHRANo ratings yet
- ETAP Specifications Guide V5 PDFDocument21 pagesETAP Specifications Guide V5 PDFCbdtxd PcbtrNo ratings yet
- Smart Grid Future PDFDocument40 pagesSmart Grid Future PDFPoojaNo ratings yet
- B-3 - 3.10 - TD - Andes 2A Exp - APCS3Ms - WD3 - V660 - MV23kV - v02.00Document28 pagesB-3 - 3.10 - TD - Andes 2A Exp - APCS3Ms - WD3 - V660 - MV23kV - v02.00Luis Marín DíazNo ratings yet
- Energy, Electrical and Power Engineering 2021-2022Document388 pagesEnergy, Electrical and Power Engineering 2021-2022Manci PeterNo ratings yet
- EMA Solar Generation ProfileDocument11 pagesEMA Solar Generation ProfileShaiful ShazwanNo ratings yet
- Piller UB V UPS Data Centers LinecardDocument7 pagesPiller UB V UPS Data Centers Linecardroxana sharifzadeNo ratings yet
- Congestion Management in Power System - A ReviewDocument6 pagesCongestion Management in Power System - A ReviewFenhia RivasNo ratings yet