You might also like
- Covid-19 Research ?Document414 pagesCovid-19 Research ?Zach Rigby100% (2)
- Mainframes RefresherDocument284 pagesMainframes RefresherJuan Felipe Delgado OrtizNo ratings yet
- Principles of Management MCQ With Answers (Updated 2021) - IndiaclassDocument1 pagePrinciples of Management MCQ With Answers (Updated 2021) - IndiaclassTRICKS MASTERNo ratings yet
- Hazard IdentificationDocument65 pagesHazard Identificationthedreampower100% (1)
- Funtional Foods 7Document67 pagesFuntional Foods 7UniatimelindaNo ratings yet
- Mainframe RefresherDocument280 pagesMainframe RefresherSravan Kumar Karna67% (3)
- 1.1.3.4 Lab - Visualizing The Black HatsDocument4 pages1.1.3.4 Lab - Visualizing The Black HatsArin Tampke71% (7)
- UNIX Shell Programming Interview Questions You'll Most Likely Be AskedFrom EverandUNIX Shell Programming Interview Questions You'll Most Likely Be AskedNo ratings yet
- 6-Procedure and Macro in Assembly Language ProgramDocument13 pages6-Procedure and Macro in Assembly Language Programafzal_a94% (35)
- Overview of Artificial IntelligenceDocument57 pagesOverview of Artificial IntelligenceAfri YantoNo ratings yet
- Class Observation - Q4Document4 pagesClass Observation - Q4Shella Mae Cani100% (1)
- CH 05Document67 pagesCH 05deigorNo ratings yet
- Chapter 6: Interrupts and Resets: Fundamental Concepts of InterruptsDocument22 pagesChapter 6: Interrupts and Resets: Fundamental Concepts of InterruptsAhmad AbunassarNo ratings yet
- Chapter 8: HCS12 Timer Functions The HCS12 Microcontroller Han-Way Huang Minnesota State University, Mankato September 2009Document55 pagesChapter 8: HCS12 Timer Functions The HCS12 Microcontroller Han-Way Huang Minnesota State University, Mankato September 2009Ahmad AbunassarNo ratings yet
- Dogfight Over Europe RyanAirDocument21 pagesDogfight Over Europe RyanAirRISHAB DAS PGP 2020 BatchNo ratings yet
- 07 - LTE Radio Planning CapacityDocument16 pages07 - LTE Radio Planning CapacityAdil EljaafariNo ratings yet
- Draft of Cooper ContractDocument7 pagesDraft of Cooper Contractmpoke50% (2)
- How 2 HAWC2, The User's ManualDocument127 pagesHow 2 HAWC2, The User's ManualMahmoud MoussaNo ratings yet
- Pooja VashisthDocument68 pagesPooja VashisthApurva SinghNo ratings yet
- EE 319K Introduction To MicrocontrollersDocument15 pagesEE 319K Introduction To Microcontrollersso16aeNo ratings yet
- Microwave Control SystemDocument15 pagesMicrowave Control SystemChvyNo ratings yet
- Chapter 4 The ProcessorDocument72 pagesChapter 4 The ProcessorJason ChenNo ratings yet
- Using RTDX With A Matlab Gui: Thomas ShenDocument7 pagesUsing RTDX With A Matlab Gui: Thomas ShendkishoreNo ratings yet
- Chapter 2 ILPDocument89 pagesChapter 2 ILPSetina AliNo ratings yet
- CS 212 OOP Lab Manual PDFDocument79 pagesCS 212 OOP Lab Manual PDFOsama AsifNo ratings yet
- Path Loss Using Free Space and 2-Ray ModelDocument3 pagesPath Loss Using Free Space and 2-Ray ModelAtharva KulkarniNo ratings yet
- DSA With Java - Unit4Document12 pagesDSA With Java - Unit4Sabin MaharjanNo ratings yet
- Lecture 5Document22 pagesLecture 5cecilio barríaNo ratings yet
- Spartan-3E MATLAB Interface DocumentationDocument18 pagesSpartan-3E MATLAB Interface DocumentationDavid FreibergerNo ratings yet
- Notes-Procedures Ver1Document9 pagesNotes-Procedures Ver1Rajiv SethNo ratings yet
- Unit 1.4Document46 pagesUnit 1.4rameshwar chintamaniNo ratings yet
- CAQA5e ch3Document45 pagesCAQA5e ch3Jameem AhamedNo ratings yet
- Programming in C: B. Tech. Sem. I (Cl/Mh/Ic/Ch)Document39 pagesProgramming in C: B. Tech. Sem. I (Cl/Mh/Ic/Ch)Pratik JayswalNo ratings yet
- Act 5Document5 pagesAct 5api-548516280No ratings yet
- Ch3 Part2 Inssets 1Document22 pagesCh3 Part2 Inssets 1Mengistu BirukeNo ratings yet
- Subroutines & Stack: Dr. Farid Farahmand Updated: 2/18/2019Document28 pagesSubroutines & Stack: Dr. Farid Farahmand Updated: 2/18/2019ZakiKhanfriNo ratings yet
- DS mpppppp11Document19 pagesDS mpppppp11Nakul PatilNo ratings yet
- Onur 447 Spring15 Lecture13 Ooo and Dataflow AfterlectureDocument62 pagesOnur 447 Spring15 Lecture13 Ooo and Dataflow AfterlectureHhsNo ratings yet
- Stacks and SubroutinesDocument12 pagesStacks and SubroutinestuấnNo ratings yet
- An Efficient Algorithm For Exploiting Multiple Arithmetic UnitsDocument9 pagesAn Efficient Algorithm For Exploiting Multiple Arithmetic UnitsKiapuch Airuch CuophiNo ratings yet
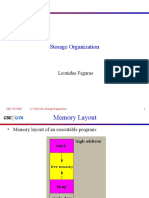
- Storage Organization: Leonidas FegarasDocument16 pagesStorage Organization: Leonidas FegarasNaveen Kumaar V VNo ratings yet
- Computer Science Department: Majlis Arts and Science College, PuramannurDocument20 pagesComputer Science Department: Majlis Arts and Science College, PuramannurJyothiNo ratings yet
- Lecture 4: Program Control: Mr. Imran Latif (Imranlatif@cuilahore - Edu.pk)Document33 pagesLecture 4: Program Control: Mr. Imran Latif (Imranlatif@cuilahore - Edu.pk)aliNo ratings yet
- Chapter 7 BDocument34 pagesChapter 7 BAmmar Abdulatef Ali Al-ShehariNo ratings yet
- Fall 2019 - CS-241 - Data Structures and Algorithms - Course OutlineDocument5 pagesFall 2019 - CS-241 - Data Structures and Algorithms - Course OutlineAroosh Khizer LoneNo ratings yet
- Lecture5 INSTRUCTIONS MICROPROCESSOR APLICATIONSDocument58 pagesLecture5 INSTRUCTIONS MICROPROCESSOR APLICATIONSagustin cordobaNo ratings yet
- MBS Lab 11Document4 pagesMBS Lab 11MuhammadHadiNo ratings yet
- Transmission Data ChecksDocument43 pagesTransmission Data ChecksanthonyNo ratings yet
- Methods: VZLWFK VZLWFKDocument5 pagesMethods: VZLWFK VZLWFKNitish PathakNo ratings yet
- Push PSW, Push H Push B, Push DDocument6 pagesPush PSW, Push H Push B, Push DRiza Pahama Mananaong100% (1)
- DSP Lab 2Document8 pagesDSP Lab 2salmanNo ratings yet
- CS8461 - Oslabmanual - ProcessDocument65 pagesCS8461 - Oslabmanual - Processsksharini67No ratings yet
- Lab Manual: Principle of Communication SystemDocument11 pagesLab Manual: Principle of Communication SystemUmar KhanNo ratings yet
- PwnCorp P9001 Assembler Programmer's ManualDocument12 pagesPwnCorp P9001 Assembler Programmer's ManualJeremy NeimanNo ratings yet
- Stacks and SubroutinesDocument12 pagesStacks and SubroutinesNguyễn Đình QuangNo ratings yet
- Attendance System Using Atmega32 PDFDocument15 pagesAttendance System Using Atmega32 PDFMOHAMMED A.M. ABUJARAD 19EE0049No ratings yet
- WibdDocument39 pagesWibd204Kashish VermaF2No ratings yet
- DSP Unit-6Document26 pagesDSP Unit-622pa5a0407No ratings yet
- ICC2 1 Import Design MCMMDocument4 pagesICC2 1 Import Design MCMMRAZNo ratings yet
- Unit III - Procedure & Macros ProgramsDocument13 pagesUnit III - Procedure & Macros ProgramsTarun SinghNo ratings yet
- Ch10 The STACK and Subroutines SlidesDocument27 pagesCh10 The STACK and Subroutines SlidesDuy HoàngNo ratings yet
- Queue ManualDocument18 pagesQueue ManualTakeshi KogaNo ratings yet
- MBS Lab 10Document6 pagesMBS Lab 10MuhammadHadiNo ratings yet
- Stack and SubroutineDocument6 pagesStack and Subroutinedeepak joshiNo ratings yet
- CS Unit 2 EoT Exam SolutionsDocument5 pagesCS Unit 2 EoT Exam SolutionsKaif AliNo ratings yet
- Buffer Overflow Paper - Vulnerabilities and AttacksDocument17 pagesBuffer Overflow Paper - Vulnerabilities and AttackssoplapollasNo ratings yet
- TechTip - Analyze Your Programs and Applications, Part II - System Administration - IT Infrastructure 3Document6 pagesTechTip - Analyze Your Programs and Applications, Part II - System Administration - IT Infrastructure 3Johnny SaysBlowmeNo ratings yet
- Introductory Comments - Palabos 1Document13 pagesIntroductory Comments - Palabos 1German ToledoNo ratings yet
- Exam Distributed Systems: Part 2 - Prof. R. WattenhoferDocument7 pagesExam Distributed Systems: Part 2 - Prof. R. WattenhoferStephen MensahNo ratings yet
- Group Assignment - MicroDocument15 pagesGroup Assignment - MicroMOHAMMED A.M. ABUJARAD 19EE0049No ratings yet
- CAP Classification System FinalDocument22 pagesCAP Classification System FinalAhmad AbunassarNo ratings yet
- Cauchy Integral FormulaDocument7 pagesCauchy Integral FormulaAhmad AbunassarNo ratings yet
- Residue Integration MethodDocument9 pagesResidue Integration MethodAhmad AbunassarNo ratings yet
- ISA CAP 2012 Job Analysis Study Blueprint Classification FinalDocument10 pagesISA CAP 2012 Job Analysis Study Blueprint Classification FinalAhmad AbunassarNo ratings yet
- Overview of Spectraa-300/400 Software Capability: Application NoteDocument10 pagesOverview of Spectraa-300/400 Software Capability: Application NoteAhmad AbunassarNo ratings yet
- Operating Manual. Contraa 800 High-Resolution Continuum Source Atomic Absorption Spectrometer - PDFDocument10 pagesOperating Manual. Contraa 800 High-Resolution Continuum Source Atomic Absorption Spectrometer - PDFAhmad AbunassarNo ratings yet
- Easymatch QCDocument366 pagesEasymatch QCAhmad AbunassarNo ratings yet
- Integration of The DR 3900 Into A Wireless Local Area Network (WLAN)Document7 pagesIntegration of The DR 3900 Into A Wireless Local Area Network (WLAN)Ahmad AbunassarNo ratings yet
- Yazeed Rbeihat 20208013 Digital Communications HW4Document8 pagesYazeed Rbeihat 20208013 Digital Communications HW4Ahmad AbunassarNo ratings yet
- CH4 Introduction To SearchDocument20 pagesCH4 Introduction To SearchAhmad AbunassarNo ratings yet
- Week 6: 3.3 Signaling Schemes With Memory 3.3 Signaling Schemes With MemoryDocument30 pagesWeek 6: 3.3 Signaling Schemes With Memory 3.3 Signaling Schemes With MemoryAhmad AbunassarNo ratings yet
- I - Control Basics: Reasons For DocumentationDocument13 pagesI - Control Basics: Reasons For DocumentationAhmad AbunassarNo ratings yet
- Ch5 State Space Search Methods MasterDocument35 pagesCh5 State Space Search Methods MasterAhmad AbunassarNo ratings yet
- Polar Form of Complex Numbers Powers and RootsDocument9 pagesPolar Form of Complex Numbers Powers and RootsAhmad AbunassarNo ratings yet
- Week 10: 4.2-1 Optimal Detection For The Vector AWGN Channel 4.2-1 Optimal Detection For The Vector AWGN ChannelDocument24 pagesWeek 10: 4.2-1 Optimal Detection For The Vector AWGN Channel 4.2-1 Optimal Detection For The Vector AWGN ChannelAhmad AbunassarNo ratings yet
- DigitCom Week 2 2021 DrTahatDocument30 pagesDigitCom Week 2 2021 DrTahatAhmad AbunassarNo ratings yet
- Week 9: 4 Optimum Receivers For AWGN Channels 4 Optimum Receivers For AWGN ChannelsDocument14 pagesWeek 9: 4 Optimum Receivers For AWGN Channels 4 Optimum Receivers For AWGN ChannelsAhmad AbunassarNo ratings yet
- Lec17 PDFDocument15 pagesLec17 PDFAhmad AbunassarNo ratings yet
- AR Apparel ProfileDocument16 pagesAR Apparel ProfileGokul RamNo ratings yet
- Biol3451 Ch4 LectDocument60 pagesBiol3451 Ch4 LectcolabrinkNo ratings yet
- Worktext in GE8: University of Southern MindanaoDocument13 pagesWorktext in GE8: University of Southern MindanaoNerjone AlveroNo ratings yet
- Deployment GuideDocument424 pagesDeployment GuideAbhilash RavindranNo ratings yet
- Financial and Managerial Acct - 1Document49 pagesFinancial and Managerial Acct - 1Neway AlemNo ratings yet
- Useful SAP Transaction Codes - ABAP, Data Dictionary, FI and CODocument1 pageUseful SAP Transaction Codes - ABAP, Data Dictionary, FI and COitjob65No ratings yet
- Week 2 - Clothes - Present ContinuosDocument5 pagesWeek 2 - Clothes - Present Continuosshkarh.azizNo ratings yet
- Illustratred Spare Parts List FOR High Speed Overlock MachineDocument52 pagesIllustratred Spare Parts List FOR High Speed Overlock MachineDrchipbrNo ratings yet
- Bcat Test SampleDocument3 pagesBcat Test Sample2057882467xuanNo ratings yet
- TB 1Document20 pagesTB 1Dr.Hira EmanNo ratings yet
- Automotive Exam 2nd GradingDocument2 pagesAutomotive Exam 2nd GradingHomer SotoNo ratings yet
- WWW Guru99 ComDocument22 pagesWWW Guru99 ComAbu Nilu Mostofa JamalNo ratings yet
- 2021philapalooza BrochureDocument2 pages2021philapalooza BrochureCasey WardNo ratings yet
- Gyakuten Kenji 2/episode 3: The Inherited Turnabout/Beginning, Part 1Document1 pageGyakuten Kenji 2/episode 3: The Inherited Turnabout/Beginning, Part 1PRATYUSH TAKALIKARNo ratings yet
- XII BPS Officers' Arrear Calculator V1.1Document12 pagesXII BPS Officers' Arrear Calculator V1.1abhieddy15No ratings yet
- 1819 3 IE502 OJTProject Belen RevisedDocument60 pages1819 3 IE502 OJTProject Belen RevisedGee Marie GayleNo ratings yet
- Issue21 Jul Eng Regional (R2)Document9 pagesIssue21 Jul Eng Regional (R2)Smarty PothithetNo ratings yet
- Dentoalveolar Surgery 1 05Document76 pagesDentoalveolar Surgery 1 05I Putu Aditya Putra WirawanNo ratings yet
- WMO 2023 - Guidance On Measuring, Modelling and Monitoring The Canopy Layer Urban Heat IslandDocument101 pagesWMO 2023 - Guidance On Measuring, Modelling and Monitoring The Canopy Layer Urban Heat IslandRenata CardosoNo ratings yet
- Arts Gazing Through LensDocument2 pagesArts Gazing Through LensRosalyn Therese S. RayosNo ratings yet
- DOT Line Shape Form Space MediaDocument13 pagesDOT Line Shape Form Space MediaIgor KanderaNo ratings yet