You might also like
- Intro To MechatronicsDocument42 pagesIntro To MechatronicsSandeep Kumar GuptaNo ratings yet
- Mechatronics CHAPTER 1Document39 pagesMechatronics CHAPTER 1NahomNo ratings yet
- Class OneDocument59 pagesClass OneTemari futureNo ratings yet
- MECHATRONICS Notes PDFDocument69 pagesMECHATRONICS Notes PDFsivakrishna nadakuduru100% (1)
- L1: Introduction To MechatronicsDocument38 pagesL1: Introduction To MechatronicsMaheshNo ratings yet
- Electromechanical Systems: Engr - Dr.M.SaleemDocument60 pagesElectromechanical Systems: Engr - Dr.M.SaleemM SaleemNo ratings yet
- Elements of Mechatronics: V. ThulasikanthDocument46 pagesElements of Mechatronics: V. ThulasikanthNeela MuraliNo ratings yet
- Unit 1Document184 pagesUnit 1KANISHKAR Hem SankarNo ratings yet
- Introduction To MechatronicsDocument150 pagesIntroduction To MechatronicsAdebola oluwadamilare prosperNo ratings yet
- Mechatronics: Notes by Arulsahayabeni, M.E.Document125 pagesMechatronics: Notes by Arulsahayabeni, M.E.beniNo ratings yet
- LEC 02 - 03 Mechatronics Systems and ApplicationsDocument24 pagesLEC 02 - 03 Mechatronics Systems and ApplicationsAakash ParmarNo ratings yet
- Intro 32Document252 pagesIntro 32ANTONo ratings yet
- Intriduction of MechatronicsDocument32 pagesIntriduction of MechatronicsCyra AndayaNo ratings yet
- C8: Sensor and Sensor TechnologyDocument72 pagesC8: Sensor and Sensor TechnologyOladokun Sulaiman Olanrewaju100% (4)
- MechatronicsDocument59 pagesMechatronicslki06343No ratings yet
- MECHATRONICSDocument71 pagesMECHATRONICSparandaman.mechNo ratings yet
- DJM3052 Industrial Electronic (UNIT 5) : SensorDocument22 pagesDJM3052 Industrial Electronic (UNIT 5) : SensorShazryl DanielNo ratings yet
- Intro To MechatronicsDocument33 pagesIntro To MechatronicsQaasim MoudNo ratings yet
- Open and ClosedDocument31 pagesOpen and ClosedLokesh SNo ratings yet
- Mechatronics - Unit 5 - NotesDocument13 pagesMechatronics - Unit 5 - NotesDulce DeNo ratings yet
- Industrial Automation - Lecture 2Document34 pagesIndustrial Automation - Lecture 2Elly TongsNo ratings yet
- Unit IDocument90 pagesUnit IPrasad varnekarNo ratings yet
- BMMI Unit 1 - Session 1Document18 pagesBMMI Unit 1 - Session 1Yashi SinghNo ratings yet
- D.chapter OneDocument23 pagesD.chapter OnedanielNo ratings yet
- Introduction To MechatronicsDocument46 pagesIntroduction To MechatronicsChristian Breth Burgos100% (2)
- Introduction To Mechatronics: By: Bruck AlemuDocument44 pagesIntroduction To Mechatronics: By: Bruck AlemumathewosNo ratings yet
- Experiment - 1: OBJECTIVE - Study and Demonstration of Mechatronic System and ItsDocument8 pagesExperiment - 1: OBJECTIVE - Study and Demonstration of Mechatronic System and ItshiteshNo ratings yet
- References: 1. Mechatronics System Design-Devdas Shetty and Richard Kolk 2. Mechatronics - W. Bolton 3. The Mechatronics Handbook - Robert H. BishopDocument30 pagesReferences: 1. Mechatronics System Design-Devdas Shetty and Richard Kolk 2. Mechatronics - W. Bolton 3. The Mechatronics Handbook - Robert H. BishopJay MenonNo ratings yet
- Mekatron01-Introduction To MechatronicsDocument55 pagesMekatron01-Introduction To MechatronicsBrian ArofianNo ratings yet
- Elements of Mechatronics: V. ThulasikanthDocument46 pagesElements of Mechatronics: V. ThulasikanthPrashanth JagadeeshNo ratings yet
- LEC 06 - 07 Mechatronics Systems and ApplicationsDocument26 pagesLEC 06 - 07 Mechatronics Systems and ApplicationsAakash ParmarNo ratings yet
- Introduction To MechatronicsDocument46 pagesIntroduction To MechatronicsDr-Amit Kumar SinghNo ratings yet
- PE 4030chapter 1 Mechatronics 9 23 2013 Rev 1.0Document76 pagesPE 4030chapter 1 Mechatronics 9 23 2013 Rev 1.0Charlton S.InaoNo ratings yet
- Lecture 1, 2, 3Document31 pagesLecture 1, 2, 3Akshet PatelNo ratings yet
- CH-1 Introduction MechatronicsDocument61 pagesCH-1 Introduction Mechatronicsdagimawgchew777No ratings yet
- Introduction To MechatronicsDocument19 pagesIntroduction To Mechatronicsanshjaiswal679No ratings yet
- Mecha Seesnor 1Document14 pagesMecha Seesnor 1Mohamed AdelNo ratings yet
- Introduction To MechatronicsDocument32 pagesIntroduction To Mechatronicsclint agustinNo ratings yet
- Mechatronics: by Ajay Kumar VermaDocument17 pagesMechatronics: by Ajay Kumar VermaAjay VermaNo ratings yet
- I&m 1Document22 pagesI&m 1Aleeza AshfaqueNo ratings yet
- 13.702 Mechatronics: Module - IDocument105 pages13.702 Mechatronics: Module - ISahad MkNo ratings yet
- MECHATRONICSDocument46 pagesMECHATRONICSGaura SaniNo ratings yet
- MechatronicsDocument61 pagesMechatronicsSajitha ManuNo ratings yet
- Mechatronics WEEK 1Document33 pagesMechatronics WEEK 1AhmedShahNo ratings yet
- Mechanotrix 1Document37 pagesMechanotrix 1Mansif HossainNo ratings yet
- Chapter 1Document40 pagesChapter 1Dagem GetachewNo ratings yet
- Week1 8Document284 pagesWeek1 8owaisNo ratings yet
- Addis Ababa Science and Technology University: Electromechanical Engineering Department Introduction To MechatronicsDocument52 pagesAddis Ababa Science and Technology University: Electromechanical Engineering Department Introduction To Mechatronicsabdulkerim seid100% (1)
- TTTTDocument54 pagesTTTThabtemariam mollaNo ratings yet
- What Is Mechatronics ?Document103 pagesWhat Is Mechatronics ?Sanjay PSNo ratings yet
- PSOC Notes 1Document28 pagesPSOC Notes 1Sudhanshu SinghNo ratings yet
- History of MechatronicsDocument20 pagesHistory of MechatronicsManoj DhageNo ratings yet
- Mechatronics 1Document53 pagesMechatronics 1Rajesh PandaNo ratings yet
- Introduction To Mechatronics: Unit-1Document12 pagesIntroduction To Mechatronics: Unit-1Neela MuraliNo ratings yet
- Unit - 1 Introduction To MechatronicsDocument106 pagesUnit - 1 Introduction To Mechatronicsaman100% (1)
- Power Electronics Applied to Industrial Systems and Transports: Volume 5: Measurement Circuits, Safeguards and Energy StorageFrom EverandPower Electronics Applied to Industrial Systems and Transports: Volume 5: Measurement Circuits, Safeguards and Energy StorageNo ratings yet
- Arduino Measurements in Science: Advanced Techniques and Data ProjectsFrom EverandArduino Measurements in Science: Advanced Techniques and Data ProjectsNo ratings yet
- Hall-Effect Sensors: Theory and ApplicationFrom EverandHall-Effect Sensors: Theory and ApplicationRating: 5 out of 5 stars5/5 (1)
- Laboratory Report 3Document6 pagesLaboratory Report 3Kim TanNo ratings yet
- Tan 201610354 2Document1 pageTan 201610354 2Kim TanNo ratings yet
- Summative Assessment # 3Document11 pagesSummative Assessment # 3Kim TanNo ratings yet
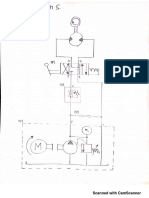
- DiagramDocument1 pageDiagramKim TanNo ratings yet
- 6.8.3 Observations (If Applicable) in This Conducted Experiment, I Observed A Few Points To Point Out. One Is The Importance ofDocument1 page6.8.3 Observations (If Applicable) in This Conducted Experiment, I Observed A Few Points To Point Out. One Is The Importance ofKim TanNo ratings yet
- Obscon (Labreport 5)Document1 pageObscon (Labreport 5)Kim TanNo ratings yet
- Lab Activity 3 - TanDocument1 pageLab Activity 3 - TanKim TanNo ratings yet
- Hydraulic and Pneumatic System: M.E. Technical Elective 1 (Mechatronics)Document58 pagesHydraulic and Pneumatic System: M.E. Technical Elective 1 (Mechatronics)Kim TanNo ratings yet
- By The End of The Lecture, The Students Will Be Able To: - Be Familiarized With Reciprocating Type of PumpsDocument28 pagesBy The End of The Lecture, The Students Will Be Able To: - Be Familiarized With Reciprocating Type of PumpsKim TanNo ratings yet
- Finals SolDocument2 pagesFinals SolKim TanNo ratings yet
- Hydraulic and Pneumatic System: M.E. Technical Elective 1 (Mechatronics)Document58 pagesHydraulic and Pneumatic System: M.E. Technical Elective 1 (Mechatronics)Kim TanNo ratings yet
- Finals Solution (Tan)Document1 pageFinals Solution (Tan)Kim TanNo ratings yet
- By The End of The Lecture, The Students Will Be Able To: - Be Familiarized With Reciprocating Type of PumpsDocument28 pagesBy The End of The Lecture, The Students Will Be Able To: - Be Familiarized With Reciprocating Type of PumpsKim TanNo ratings yet
- Philippine Vernacular Architecture: Pre-Hispanic EraDocument58 pagesPhilippine Vernacular Architecture: Pre-Hispanic EraKim TanNo ratings yet
- Finals Solution (Tan)Document1 pageFinals Solution (Tan)Kim TanNo ratings yet
- Chapter 3 - Development of Filipino NationalismDocument10 pagesChapter 3 - Development of Filipino NationalismAira Joy AnyayahanNo ratings yet
- Scanned With CamscannerDocument2 pagesScanned With CamscannerKim TanNo ratings yet
- Interjections NotesDocument2 pagesInterjections NotesKanna ImuiNo ratings yet
- WideScreen Code For PS2 GamesDocument78 pagesWideScreen Code For PS2 Gamesmarcus viniciusNo ratings yet
- Introduction To Neutrino Physics: Paolo LipariDocument85 pagesIntroduction To Neutrino Physics: Paolo LipariSubhankar HowladerNo ratings yet
- Blockchain Disruption in The Forex Trading MarketDocument64 pagesBlockchain Disruption in The Forex Trading MarketVijayKhareNo ratings yet
- Barriers of CommunicationDocument5 pagesBarriers of CommunicationIVY YBAÑEZNo ratings yet
- NeedScope On TechnologyDocument22 pagesNeedScope On TechnologyNguyen Ngo Dinh PhuongNo ratings yet
- 1:100 Scale: SPACE-X "Crew Dragon 2" Demo Mission-1 CapsuleDocument9 pages1:100 Scale: SPACE-X "Crew Dragon 2" Demo Mission-1 CapsuleBearium YTNo ratings yet
- UnitPlan (P.E) Grade 6Document13 pagesUnitPlan (P.E) Grade 6Lou At CamellaNo ratings yet
- Assignment 2 Grammar Lesson PlanDocument26 pagesAssignment 2 Grammar Lesson PlanKesia Kerspay100% (1)
- Formal Report Expt 5Document6 pagesFormal Report Expt 5AnonymouscatNo ratings yet
- Review. Applications of Ecogeography and Geographic Information Systems in Conservation and Utilization of Plant Genetic ResourcesDocument11 pagesReview. Applications of Ecogeography and Geographic Information Systems in Conservation and Utilization of Plant Genetic ResourcesEmilio Patané SpataroNo ratings yet
- Chapter4 RetainingwallDocument55 pagesChapter4 RetainingwallNur HazwaniNo ratings yet
- Philosophical Thoughts On EducationDocument30 pagesPhilosophical Thoughts On EducationCharyl Louise MonderondoNo ratings yet
- Contractor Hse Management ProgramDocument12 pagesContractor Hse Management ProgramAhmed IbrahimNo ratings yet
- Delonghi Pinguino Water To Air Pac We125 Instruction Manual 715678Document21 pagesDelonghi Pinguino Water To Air Pac We125 Instruction Manual 715678Luis AlbertoAlmeidaSilva100% (1)
- ENIRAM - Guide To Dynamic Trim Optimization 280611 PDFDocument14 pagesENIRAM - Guide To Dynamic Trim Optimization 280611 PDFPhineas MagellanNo ratings yet
- FINAL ReportDocument48 pagesFINAL ReportMythri RangaswamyNo ratings yet
- 1506a E88tag3 PDFDocument5 pages1506a E88tag3 PDFmohammad javad golNo ratings yet
- Instruction Manual: Slit Lamp Bon SL-EDocument20 pagesInstruction Manual: Slit Lamp Bon SL-EVladimir LevchenkoNo ratings yet
- Response 2000 IntroductionDocument24 pagesResponse 2000 IntroductionRory Cristian Cordero RojoNo ratings yet
- Chapter 2 Ag - EconDocument7 pagesChapter 2 Ag - EconJay Kenneth Bajar Cernal100% (1)
- Cambridge International AS & A Level: Biology 9700/21Document18 pagesCambridge International AS & A Level: Biology 9700/21Lavanya EaswarNo ratings yet
- CHAPTER 2 - ALGEBRA (Latest)Document41 pagesCHAPTER 2 - ALGEBRA (Latest)FirdausNo ratings yet
- Da Insem AllDocument217 pagesDa Insem AllTECOA136TejasJadhavNo ratings yet
- Xgenus X-Ray PDFDocument61 pagesXgenus X-Ray PDFAli NuriNo ratings yet
- A Brief Tutorial On Studio MonitorsDocument18 pagesA Brief Tutorial On Studio MonitorsCurtis O'BrienNo ratings yet
- Stripper EZ-range US v3 Web-1Document2 pagesStripper EZ-range US v3 Web-1irwin kurniadiNo ratings yet
- KV Class 3 Half Yearly Previous Year Question Paper 2019 ComputerDocument2 pagesKV Class 3 Half Yearly Previous Year Question Paper 2019 Computer02 Aanya Gupta VII CNo ratings yet
- Cocoon 8002 PDFDocument24 pagesCocoon 8002 PDFaxisNo ratings yet
- Casio AT 1 Service ManualDocument28 pagesCasio AT 1 Service ManualMario Gabriel MoralliNo ratings yet