You might also like
- Tables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiFrom EverandTables of Coefficients for the Analysis of Triple Angular Correlations of Gamma-Rays from Aligned NucleiNo ratings yet
- 1.8 Similarity Transformations 15Document15 pages1.8 Similarity Transformations 15Mae RohNo ratings yet
- Representations of Clifford AlgebrasDocument8 pagesRepresentations of Clifford Algebras劉汯紳No ratings yet
- Difference Equations in Normed Spaces: Stability and OscillationsFrom EverandDifference Equations in Normed Spaces: Stability and OscillationsNo ratings yet
- Eng Vibration Handout 2Document4 pagesEng Vibration Handout 2Je SolarteNo ratings yet
- Stability Analysis For VAR SystemsDocument11 pagesStability Analysis For VAR SystemsCristian CernegaNo ratings yet
- ch8 ProbsDocument4 pagesch8 ProbsEkrem GüldesteNo ratings yet
- Constitutive Relations: Dr. Rakesh K KapaniaDocument43 pagesConstitutive Relations: Dr. Rakesh K KapaniavictorNo ratings yet
- Problem Sheet 1Document5 pagesProblem Sheet 1Divyanshu KumarNo ratings yet
- Lecture 4: Use of Symmetry & Skewed SupportsDocument10 pagesLecture 4: Use of Symmetry & Skewed SupportsRamachandra ReddyNo ratings yet
- Exercice S Repetition 1Document26 pagesExercice S Repetition 1amine.haidaoui2000No ratings yet
- Lecture4 2017Document37 pagesLecture4 2017Tesfaye Utopia UtopiaNo ratings yet
- Chapter 1Document9 pagesChapter 1jemalNo ratings yet
- Chapter 03Document89 pagesChapter 03KIÊN HOÀNG TRUNGNo ratings yet
- Buckling Loads of Columns With Gradually Changing Cross-Section Subjected To Combined Axial LoadingDocument12 pagesBuckling Loads of Columns With Gradually Changing Cross-Section Subjected To Combined Axial LoadingMEER MUSTAFA ALINo ratings yet
- Ragazzo-Ruiz2017 Article ViscoelasticTidesModelsForUseIDocument41 pagesRagazzo-Ruiz2017 Article ViscoelasticTidesModelsForUseIVishnu ViswanathanNo ratings yet
- Presentation 3Document62 pagesPresentation 3leleparthaNo ratings yet
- ElasticityDocument17 pagesElasticitybenyfirstNo ratings yet
- Appendix A. Angular Momentum and Spherical HarmonicsDocument36 pagesAppendix A. Angular Momentum and Spherical HarmonicslahmsushNo ratings yet
- Mathematical Preliminaries: 1.1 NotationDocument62 pagesMathematical Preliminaries: 1.1 NotationChandra ClarkNo ratings yet
- Nonlinear Inelastic Analysis of Steel-Concrete Composite Beam-Columns Using The Stability FunctionsDocument23 pagesNonlinear Inelastic Analysis of Steel-Concrete Composite Beam-Columns Using The Stability FunctionsIgnacio TabuadaNo ratings yet
- Oep Fem PDFDocument17 pagesOep Fem PDFManoj BaralNo ratings yet
- Midterm 04 PDFDocument3 pagesMidterm 04 PDFOlga Joy Labajo GerastaNo ratings yet
- CM 19 One D CrystalDocument9 pagesCM 19 One D CrystalChandra ManikNo ratings yet
- 2002 - Sakai and Kawashima - 12ECEE2002 - 252Document10 pages2002 - Sakai and Kawashima - 12ECEE2002 - 252fsimaNo ratings yet
- Elec 260 Tutorial - June 2, 2010 Topics To Be Covered:: Cartesian Polar ExponentialDocument8 pagesElec 260 Tutorial - June 2, 2010 Topics To Be Covered:: Cartesian Polar ExponentialJustine MatthewsNo ratings yet
- Sma Oscillations127Document16 pagesSma Oscillations127JacecosmozNo ratings yet
- WK 11Document36 pagesWK 11Muhammad BilalNo ratings yet
- Chapter 13 Multidegree of Freedom Systems: M K Are Mass and Stiffness Matrix Respectfully. Premultiplying MDocument15 pagesChapter 13 Multidegree of Freedom Systems: M K Are Mass and Stiffness Matrix Respectfully. Premultiplying Mkaruna141990No ratings yet
- Ae5310midterm 2022 OctoberDocument6 pagesAe5310midterm 2022 OctoberJohnNo ratings yet
- Ductility of Reinforced Lightweight Concrete Beams and ColumnsDocument24 pagesDuctility of Reinforced Lightweight Concrete Beams and ColumnsAref AbadelNo ratings yet
- 2011 Fall With SolutionsDocument38 pages2011 Fall With SolutionsRay MondoNo ratings yet
- Mechanics - Chap. 2 Problems)Document3 pagesMechanics - Chap. 2 Problems)Carlos CarranzaNo ratings yet
- Report On Composite Material Engineering ConstantsDocument5 pagesReport On Composite Material Engineering ConstantshandinfanNo ratings yet
- Bab 8 - 1Document29 pagesBab 8 - 1M YusupNo ratings yet
- WSWOD 12 SupplementalDocument2 pagesWSWOD 12 SupplementalCristianJiménezNo ratings yet
- Introduction:The Stability and Instability of Structural Elements in Offshore StructuresDocument6 pagesIntroduction:The Stability and Instability of Structural Elements in Offshore Structuressudipta_chakraborty_78No ratings yet
- Module 1Document45 pagesModule 1MD SHAHRIARMAHMUDNo ratings yet
- Changing Variables.: LS.4 Decoupling SystemsDocument5 pagesChanging Variables.: LS.4 Decoupling SystemsshankyforuNo ratings yet
- Article Hourglass Energy.3.9.03Document10 pagesArticle Hourglass Energy.3.9.03Stamin StefanNo ratings yet
- Remotely Driven 2 DOF Arm - Asada and Slotine PDFDocument10 pagesRemotely Driven 2 DOF Arm - Asada and Slotine PDFasprillaNo ratings yet
- Physics 251, Honours Classical Mechanics 1: Homework #6: M M K K X XDocument2 pagesPhysics 251, Honours Classical Mechanics 1: Homework #6: M M K K X XJean-Samuel RouxNo ratings yet
- FQT2023 2Document5 pagesFQT2023 2muay88No ratings yet
- Beam Element ExampleDocument4 pagesBeam Element ExampleAzim SamiinNo ratings yet
- Assignment On Matrix: Lets Play Physics 9681634157Document7 pagesAssignment On Matrix: Lets Play Physics 9681634157Subhadip MaityNo ratings yet
- EMAE 415 Lectures Finite Element Analysis - Basic ConceptsDocument72 pagesEMAE 415 Lectures Finite Element Analysis - Basic ConceptsPedro LeosNo ratings yet
- Tutorial Sheet 1 To 6Document11 pagesTutorial Sheet 1 To 6shubham sudarshanamNo ratings yet
- Euclidean Transformation PDFDocument2 pagesEuclidean Transformation PDFKARENNo ratings yet
- Exact Shape Functions For Timoshenko Beam Element: IOSR Journal of Computer Engineering May 2017Document10 pagesExact Shape Functions For Timoshenko Beam Element: IOSR Journal of Computer Engineering May 2017Prasant SahayNo ratings yet
- Stability Analysis For VAR SystemsDocument12 pagesStability Analysis For VAR SystemscosminNo ratings yet
- Beam Element in FEM/FEADocument24 pagesBeam Element in FEM/FEAOnkar KakadNo ratings yet
- 374 HW2Document2 pages374 HW2anreigioNo ratings yet
- Ch.8 Linear AlgebraDocument16 pagesCh.8 Linear AlgebraHưng Đoàn VănNo ratings yet
- Abney McPeek An NGDocument23 pagesAbney McPeek An NGMohammad Imran ShafiNo ratings yet
- Mathematical Methods (Second Year) MT 2009 Problem Set 2: Linear Algebra IIDocument3 pagesMathematical Methods (Second Year) MT 2009 Problem Set 2: Linear Algebra IIRoy VeseyNo ratings yet
- Lecture 4: Linear Systems of Equations and Cramer's Rule: Zhenning Cai September 2, 2019Document5 pagesLecture 4: Linear Systems of Equations and Cramer's Rule: Zhenning Cai September 2, 2019Liu JianghaoNo ratings yet
- T Area X EI T Area X EI: Theory I Deflection of Beams, Frames and Trusses Deflection of BeamsDocument6 pagesT Area X EI T Area X EI: Theory I Deflection of Beams, Frames and Trusses Deflection of BeamsMelvin EsguerraNo ratings yet
- Solution: B)Document10 pagesSolution: B)TAWFIQ RAHMANNo ratings yet
- Hubtown Case-Brief Profile (1) - I: NtroductionDocument2 pagesHubtown Case-Brief Profile (1) - I: Ntroductionayushi2193No ratings yet
- TakeoversDocument10 pagesTakeoversCuong Huy NguyenNo ratings yet
- Try These Funny Hindi Rhymes To Memorize That Tricky Periodic Table - KshitijDocument12 pagesTry These Funny Hindi Rhymes To Memorize That Tricky Periodic Table - KshitijabhijeetNo ratings yet
- Appendix Selected Problems of Controllability and Observability of Linear SystemsDocument31 pagesAppendix Selected Problems of Controllability and Observability of Linear SystemsNavdeep GoelNo ratings yet
- Bridge Bearing & Expamnsion Joints PDFDocument222 pagesBridge Bearing & Expamnsion Joints PDFmekkawi665086% (7)
- Unit 6Document32 pagesUnit 6May Thant SinNo ratings yet
- Comparison... Lesson PlanDocument4 pagesComparison... Lesson PlanHicham EljarrariNo ratings yet
- Talcott ParsonsDocument20 pagesTalcott Parsonssyedarida fatimaNo ratings yet
- Grandfather Tang Lesson PlanDocument6 pagesGrandfather Tang Lesson PlanalyssamanningNo ratings yet
- Ebop Scada ManualDocument41 pagesEbop Scada ManualDawood TahirNo ratings yet
- Agata TurritelaDocument7 pagesAgata TurritelashamballaNo ratings yet
- Intertek Minerals Schedule of Services and Charges 2020 AUSDocument48 pagesIntertek Minerals Schedule of Services and Charges 2020 AUSVivek RanganathanNo ratings yet
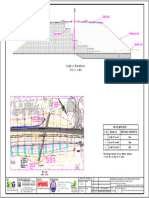
- Sag 011 5267 DSN PW em 24.380 24.520 Ol SG2 100 01Document1 pageSag 011 5267 DSN PW em 24.380 24.520 Ol SG2 100 01Sanjay SwamiNo ratings yet
- Algebra 2 and Trigonometry: English Bengali Problem SolvingDocument13 pagesAlgebra 2 and Trigonometry: English Bengali Problem SolvingHasan AsifNo ratings yet
- DS BR ACRYLIC PU CoatingDocument3 pagesDS BR ACRYLIC PU CoatingSomak DuariNo ratings yet
- Valeroso vs. CA Case DigestDocument1 pageValeroso vs. CA Case DigestMarivic Veneracion100% (2)
- GUIA Inglés 2 ADV ExtraordinarioDocument2 pagesGUIA Inglés 2 ADV ExtraordinarioPaulo GallegosNo ratings yet
- Us District Court of Massachusetts Promotes Human and Constitutional Rights Violator Magistrate Judge Leo T. Sorokin To Chief Magistrate JudgeDocument98 pagesUs District Court of Massachusetts Promotes Human and Constitutional Rights Violator Magistrate Judge Leo T. Sorokin To Chief Magistrate Judgetired_of_corruptionNo ratings yet
- Your Partner For Offshore Floating ProductionDocument20 pagesYour Partner For Offshore Floating ProductionHmidaNo ratings yet
- Breast UltrasoundDocument57 pagesBreast UltrasoundYoungFanjiensNo ratings yet
- I&m RF Interference HuntingDocument75 pagesI&m RF Interference HuntingPer KoNo ratings yet
- Xpression 3 Design Track - Xpresso For Adobe InDesign CS3 PDFDocument241 pagesXpression 3 Design Track - Xpresso For Adobe InDesign CS3 PDFcipdaleNo ratings yet
- Manual Placa Mãe X10SLL-F Super Micro PDFDocument111 pagesManual Placa Mãe X10SLL-F Super Micro PDFMarceloNo ratings yet
- Drilling For DummiesDocument37 pagesDrilling For Dummieschaeqq100% (1)
- Clinical InterviewDocument29 pagesClinical InterviewVasundhara RanaNo ratings yet
- Cat. Parker Pradifa Dirt SealsDocument2 pagesCat. Parker Pradifa Dirt SealsAlejandro GilNo ratings yet
- 3D Laser ScannerDocument100 pages3D Laser ScannerVojta5100% (1)
- Muhammad Ramdhan Suwandi-N8d-360179141Document6 pagesMuhammad Ramdhan Suwandi-N8d-360179141Rija SunaNo ratings yet
- EPGP-13-Quality Managment - Course Outline - Sec A, B, CDDocument4 pagesEPGP-13-Quality Managment - Course Outline - Sec A, B, CDreva_radhakrish1834No ratings yet
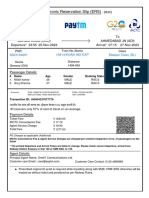
- Train TicketDocument2 pagesTrain TicketSunil kumarNo ratings yet
- Giza: The Tesla Connection: Acoustical Science and the Harvesting of Clean EnergyFrom EverandGiza: The Tesla Connection: Acoustical Science and the Harvesting of Clean EnergyNo ratings yet
- Summary and Interpretation of Reality TransurfingFrom EverandSummary and Interpretation of Reality TransurfingRating: 5 out of 5 stars5/5 (5)
- A Brief History of Time: From the Big Bang to Black HolesFrom EverandA Brief History of Time: From the Big Bang to Black HolesRating: 4 out of 5 stars4/5 (2193)
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseFrom EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseRating: 3.5 out of 5 stars3.5/5 (69)
- A Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceFrom EverandA Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceRating: 4 out of 5 stars4/5 (51)
- Midnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterFrom EverandMidnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterRating: 4.5 out of 5 stars4.5/5 (410)
- Quantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessFrom EverandQuantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessRating: 4 out of 5 stars4/5 (6)
- Quantum Physics: What Everyone Needs to KnowFrom EverandQuantum Physics: What Everyone Needs to KnowRating: 4.5 out of 5 stars4.5/5 (49)
- Knocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldFrom EverandKnocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldRating: 3.5 out of 5 stars3.5/5 (64)
- The End of Everything: (Astrophysically Speaking)From EverandThe End of Everything: (Astrophysically Speaking)Rating: 4.5 out of 5 stars4.5/5 (157)
- A Natural History of Color: The Science Behind What We See and How We See itFrom EverandA Natural History of Color: The Science Behind What We See and How We See itRating: 4 out of 5 stars4/5 (13)
- Lost in Math: How Beauty Leads Physics AstrayFrom EverandLost in Math: How Beauty Leads Physics AstrayRating: 4.5 out of 5 stars4.5/5 (125)
- Bedeviled: A Shadow History of Demons in ScienceFrom EverandBedeviled: A Shadow History of Demons in ScienceRating: 5 out of 5 stars5/5 (5)
- Black Holes: The Key to Understanding the UniverseFrom EverandBlack Holes: The Key to Understanding the UniverseRating: 4.5 out of 5 stars4.5/5 (13)
- Packing for Mars: The Curious Science of Life in the VoidFrom EverandPacking for Mars: The Curious Science of Life in the VoidRating: 4 out of 5 stars4/5 (1396)
- What If?: Serious Scientific Answers to Absurd Hypothetical QuestionsFrom EverandWhat If?: Serious Scientific Answers to Absurd Hypothetical QuestionsRating: 5 out of 5 stars5/5 (5)
- Let There Be Light: Physics, Philosophy & the Dimensional Structure of ConsciousnessFrom EverandLet There Be Light: Physics, Philosophy & the Dimensional Structure of ConsciousnessRating: 4.5 out of 5 stars4.5/5 (57)
- The Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeFrom EverandThe Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeNo ratings yet
- Vibration and Frequency: How to Get What You Want in LifeFrom EverandVibration and Frequency: How to Get What You Want in LifeRating: 4.5 out of 5 stars4.5/5 (13)
- The Beginning of Infinity: Explanations That Transform the WorldFrom EverandThe Beginning of Infinity: Explanations That Transform the WorldRating: 5 out of 5 stars5/5 (60)
- The Power of Eight: Harnessing the Miraculous Energies of a Small Group to Heal Others, Your Life, and the WorldFrom EverandThe Power of Eight: Harnessing the Miraculous Energies of a Small Group to Heal Others, Your Life, and the WorldRating: 4.5 out of 5 stars4.5/5 (54)
- Starry Messenger: Cosmic Perspectives on CivilizationFrom EverandStarry Messenger: Cosmic Perspectives on CivilizationRating: 4.5 out of 5 stars4.5/5 (159)