You might also like
- The Composer's Guide To TonalityDocument6 pagesThe Composer's Guide To TonalityAriel RamosNo ratings yet
- Cs601 Assignment 2 Helping MaterialDocument98 pagesCs601 Assignment 2 Helping Materialcs619finalproject.comNo ratings yet
- Testeo y Ajuste VR3Document24 pagesTesteo y Ajuste VR3Jonathan100% (1)
- December 5, 2022 SmawDocument6 pagesDecember 5, 2022 SmawTeacher Ronel SDO NavotasNo ratings yet
- DLP Science 8Document26 pagesDLP Science 8Vianney Camacho100% (1)
- 90206-1045DEG E Troubleshooting ManualDocument572 pages90206-1045DEG E Troubleshooting ManualVickocorp SlpNo ratings yet
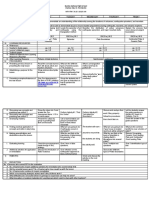
- Grade Level Quarter / Domain Week & Day No. Page No.: Detailed Science Lesson PlanDocument5 pagesGrade Level Quarter / Domain Week & Day No. Page No.: Detailed Science Lesson PlanJheaz ZelleNo ratings yet
- Safety Considerations of Wireless Charger For EVDocument11 pagesSafety Considerations of Wireless Charger For EVElectrical-EngineerNo ratings yet
- Filtering and Edge Detection 2Document88 pagesFiltering and Edge Detection 2Kom ChegNo ratings yet
- Feature Descriptors: Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning LabDocument88 pagesFeature Descriptors: Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning LabHuynh Viet TrungNo ratings yet
- Ce 512 CoverDocument6 pagesCe 512 CoverREC ALFONSO CINCONo ratings yet
- 4-181030-Practice Drawing Involute Gear Using MathematicaDocument15 pages4-181030-Practice Drawing Involute Gear Using MathematicaPradita FirmansyahNo ratings yet
- Lecture 6: Finding Features (Part 1/2) : Professor Fei - Fei Li Stanford Vision LabDocument41 pagesLecture 6: Finding Features (Part 1/2) : Professor Fei - Fei Li Stanford Vision LabddepdepNo ratings yet
- CE8301-SOM-I-By WWW - LearnEngineering.in PDFDocument128 pagesCE8301-SOM-I-By WWW - LearnEngineering.in PDFMadhu shivaaniNo ratings yet
- From Compass To Hard Drive-Integrated Activities For Studying MagnetsDocument9 pagesFrom Compass To Hard Drive-Integrated Activities For Studying MagnetsnomoNo ratings yet
- Relativity: Weak-Field Approximation and Gravitational WavesDocument4 pagesRelativity: Weak-Field Approximation and Gravitational WavesEpic WinNo ratings yet
- Stars and ConstellationsDocument2 pagesStars and Constellationsapi-399894465No ratings yet
- Applications of Borehole Imaging To Hydrocarbon Exploration and ProductionDocument6 pagesApplications of Borehole Imaging To Hydrocarbon Exploration and ProductionAbdo TashnaNo ratings yet
- Grand DemoDocument4 pagesGrand DemoAngel Mae Valdez ArnaizNo ratings yet
- Upang Cea Bsce Year-3 p1Document81 pagesUpang Cea Bsce Year-3 p1Jaira Pitogo MasuangatNo ratings yet
- The Spectrum of Sodium: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIDocument6 pagesThe Spectrum of Sodium: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIEpic WinNo ratings yet
- Course Syllabus CET 151 Introduction To AutocadDocument3 pagesCourse Syllabus CET 151 Introduction To Autocadmani11111No ratings yet
- Sheet 4Document8 pagesSheet 4Mêly CrêâzyGîrlNo ratings yet
- Albert Wang Uoc Advanced ESDDocument32 pagesAlbert Wang Uoc Advanced ESDElisavNirolfNo ratings yet
- Mechanism of Work Hardening in Hadfield Manganese SteelDocument24 pagesMechanism of Work Hardening in Hadfield Manganese SteelBastian Calderon DonosoNo ratings yet
- 7-The Physical World: Topic 3Document14 pages7-The Physical World: Topic 3adamNo ratings yet
- 3 Lesson Plan Physical ScienceDocument6 pages3 Lesson Plan Physical ScienceansalerochNo ratings yet
- ELEN 3084 OBE Course SyllabusDocument4 pagesELEN 3084 OBE Course SyllabusGillianne Mae VargasNo ratings yet
- Turner Lesson Plan 2 Screw ThreadDocument2 pagesTurner Lesson Plan 2 Screw ThreadNitinNo ratings yet
- Lesson Plan in Science 7Document5 pagesLesson Plan in Science 7Desiree VillanuevaNo ratings yet
- Lecture 13 - Compound Thin Film Soar CellsDocument57 pagesLecture 13 - Compound Thin Film Soar CellsRupesh KannanNo ratings yet
- CE523 Fall 2011 SyllabusDocument6 pagesCE523 Fall 2011 SyllabusFerdz PequiroNo ratings yet
- SolidWorks Simulation (093-095)Document3 pagesSolidWorks Simulation (093-095)Jose EnriquezNo ratings yet
- TCJ PS2 Electrical Wiring Lesson Plan Days 1-4Document6 pagesTCJ PS2 Electrical Wiring Lesson Plan Days 1-4Daisy Torres100% (1)
- Lesson Plan HW1: DAY Date: 1Document6 pagesLesson Plan HW1: DAY Date: 1Reandon CandariNo ratings yet
- Lesson Plan HW1: DAY Date: 1Document6 pagesLesson Plan HW1: DAY Date: 1Reandon CandariNo ratings yet
- Leph 201404 Econtent2019 PDFDocument27 pagesLeph 201404 Econtent2019 PDFPriyanshu VishwakarmaNo ratings yet
- Answer Sheet:: Instructions For The Submission of Your AnswersDocument5 pagesAnswer Sheet:: Instructions For The Submission of Your AnswersAndrianne MontefalcoNo ratings yet
- 1ST QuarterDocument27 pages1ST QuarterMarife GuadalupeNo ratings yet
- Convolutional Neural Network With Data Augmentation For SAR Target RecognitionDocument5 pagesConvolutional Neural Network With Data Augmentation For SAR Target RecognitionS M RizviNo ratings yet
- Form No. (12) : Course SpecificationDocument4 pagesForm No. (12) : Course SpecificationSarah KandilNo ratings yet
- EUV Lithography 2009Document37 pagesEUV Lithography 2009Gabriel DonovanNo ratings yet
- Section Marks A B C1 C2 TotalDocument8 pagesSection Marks A B C1 C2 TotalahmedNo ratings yet
- AIATS JEE (M) 2021 Test-2 (Code-C) 10-11-2019Document15 pagesAIATS JEE (M) 2021 Test-2 (Code-C) 10-11-2019NinaNo ratings yet
- Finite Element Analysis of Bonded Repairs and Analysis Methods For The ASIP EngineerDocument38 pagesFinite Element Analysis of Bonded Repairs and Analysis Methods For The ASIP EngineerpuhumightNo ratings yet
- DLL - Science 10 For EditDocument70 pagesDLL - Science 10 For EditJoanne Diaz JacintoNo ratings yet
- Mapa Solar EnergeticaDocument377 pagesMapa Solar EnergeticaH Colque GarcíaNo ratings yet
- Mycbseguide: Class 12 - Physics Term-2 Sample Paper-11 Marks: 35 Time Allowed: 2 Hours InstructionsDocument9 pagesMycbseguide: Class 12 - Physics Term-2 Sample Paper-11 Marks: 35 Time Allowed: 2 Hours InstructionssumitNo ratings yet
- Sci Q3 W10 DLLDocument7 pagesSci Q3 W10 DLLPamela Anne RiojaNo ratings yet
- CE 370-Lecture-14 (Design of Flanged Sections) (Read-Only) PDFDocument40 pagesCE 370-Lecture-14 (Design of Flanged Sections) (Read-Only) PDFJamal RkhNo ratings yet
- Matter and Chemical Bonding Unit Outline NewDocument3 pagesMatter and Chemical Bonding Unit Outline NewNik HarithNo ratings yet
- 1st Quarter (PDF - Io)Document27 pages1st Quarter (PDF - Io)AshMere MontesinesNo ratings yet
- CAD and Finite Element Analysis: - Most ME CAD Applications Require ADocument30 pagesCAD and Finite Element Analysis: - Most ME CAD Applications Require AbalasanjeevNo ratings yet
- Module 4 Modern Atomic Theory and The Periodic TableDocument8 pagesModule 4 Modern Atomic Theory and The Periodic TableJuraKenNo ratings yet
- Electron Probe Microanalysis - Scanning Electron Microscopy Epma - SemDocument14 pagesElectron Probe Microanalysis - Scanning Electron Microscopy Epma - Semmanas773No ratings yet
- Dlp-Science 8Document30 pagesDlp-Science 8Vianney CamachoNo ratings yet
- EBSD CompilationDocument118 pagesEBSD CompilationNaveenDarwinNo ratings yet
- Simulation and Analysis Laboratory - 2013 - RegulationDocument71 pagesSimulation and Analysis Laboratory - 2013 - RegulationSivakumar ANo ratings yet
- Week 6 Css 7 Summative TestDocument4 pagesWeek 6 Css 7 Summative TestAhron Lee SanchoNo ratings yet
- Educ 305 - Evaluation AssessmentsDocument3 pagesEduc 305 - Evaluation Assessmentsapi-644092162No ratings yet
- Sec Not Condly Re Te: Evised Pro Oposal For R Encoding G NüshuDocument102 pagesSec Not Condly Re Te: Evised Pro Oposal For R Encoding G Nüshucc741780051No ratings yet
- EXP-9 To Determine The Material Fringe Constant Using Compression Method in TwoDocument3 pagesEXP-9 To Determine The Material Fringe Constant Using Compression Method in TwoSS-19-Devesh JaiswalNo ratings yet
- Neutron Cross Sections: Neutron Resonance Parameters and Thermal Cross Sections, Part A: Z=1-60From EverandNeutron Cross Sections: Neutron Resonance Parameters and Thermal Cross Sections, Part A: Z=1-60Rating: 1 out of 5 stars1/5 (1)
- Neutron Cross Sections: Neutron Resonance Parameters and Thermal Cross Sections Part B: Z=61-100From EverandNeutron Cross Sections: Neutron Resonance Parameters and Thermal Cross Sections Part B: Z=61-100No ratings yet
- Cross-Curricular Building Blocks - Grades 5-6: Ready-To-Use Activities to Supplement Any Teaching SituationFrom EverandCross-Curricular Building Blocks - Grades 5-6: Ready-To-Use Activities to Supplement Any Teaching SituationNo ratings yet
- 301 Operating System ConceptsDocument3 pages301 Operating System Conceptssubhash221103No ratings yet
- XXXX ATM Principle: ISSUE2.0Document30 pagesXXXX ATM Principle: ISSUE2.0anon_164514627No ratings yet
- Boarding Pass: Fredy Budhi Dharmawan Seq No: 62 Yzxprx Flight No: SJ-599 9771080373929C1Document1 pageBoarding Pass: Fredy Budhi Dharmawan Seq No: 62 Yzxprx Flight No: SJ-599 9771080373929C1FREDYANAK2 Istri1No ratings yet
- Java TutorialDocument5 pagesJava Tutorial@jazNo ratings yet
- DWH Question BankDocument9 pagesDWH Question Bankbala swaroopNo ratings yet
- Oracle How To Prepare Mass Additions - Populate FA Data in Oracle v2Document8 pagesOracle How To Prepare Mass Additions - Populate FA Data in Oracle v2JoyNo ratings yet
- Step by Step Installation Process of Catia V6R2009 x64 Bit On Windows XP x64 BitDocument14 pagesStep by Step Installation Process of Catia V6R2009 x64 Bit On Windows XP x64 BitBudy SinagaNo ratings yet
- CEL FI RS2 Multi-Carrier Cellular Indoor Coverage: Single BandDocument2 pagesCEL FI RS2 Multi-Carrier Cellular Indoor Coverage: Single BandMilo BoonNo ratings yet
- Thebitbucket - co.Uk-Spanning Tree Protocol Topic NotesDocument25 pagesThebitbucket - co.Uk-Spanning Tree Protocol Topic NotesMeklati YounessNo ratings yet
- Iot Based Health Monitoring System CodeDocument3 pagesIot Based Health Monitoring System CodeMahesh KumarNo ratings yet
- Hardik Choudhary N212, 70471118013 Part BDocument5 pagesHardik Choudhary N212, 70471118013 Part BAarish RoyNo ratings yet
- TC74VHC4052AF Datasheet en 20140301Document13 pagesTC74VHC4052AF Datasheet en 20140301Ngo DucNo ratings yet
- PVS-16/20/24MH: PV Combiner Box For SystemDocument1 pagePVS-16/20/24MH: PV Combiner Box For SystemThắng CòiNo ratings yet
- GNSS3Document30 pagesGNSS3DheerajKaushalNo ratings yet
- New Print PDFDocument6 pagesNew Print PDFGobinda RoyNo ratings yet
- 03-0271 Operation WSRDocument13 pages03-0271 Operation WSRmao limingNo ratings yet
- Electric Vehicle Charging Infrastructure: Universal Design GuidelinesDocument39 pagesElectric Vehicle Charging Infrastructure: Universal Design GuidelinesSameera ShamanNo ratings yet
- On Tang Co Laboratory 1Document10 pagesOn Tang Co Laboratory 1Efraim John Hernandez100% (1)
- Example Fast Fourier Oppenheim PDF TransformDocument2 pagesExample Fast Fourier Oppenheim PDF TransformJamesNo ratings yet
- Assignment 1 (Mis201)Document5 pagesAssignment 1 (Mis201)Md. Ayman IqbalNo ratings yet
- Arkl Limbah B3 Petrokimia GresikDocument28 pagesArkl Limbah B3 Petrokimia GresikranindytaNo ratings yet
- Vulva LDocument3 pagesVulva Lsubhajit_palNo ratings yet
- Chapter 1 - Introduction To Quantitative AnalysisDocument35 pagesChapter 1 - Introduction To Quantitative AnalysisAbo FawazNo ratings yet
- Christianity Krishn Niti Hai PDFDocument332 pagesChristianity Krishn Niti Hai PDFVikas MehtaNo ratings yet
- BIS - 6660D Based On Intel H81 Chipset Support The 4th GeneratDocument1 pageBIS - 6660D Based On Intel H81 Chipset Support The 4th GeneratAlvin ZetoNo ratings yet